基于VMD-MDE的柱塞泵磨损故障诊断研究*
2021-09-27曲全鹏曲海军
曲全鹏,曲海军,张 强
(1.河南工程学院 工程训练中心,河南 郑州 451191;2.河南理工大学 机械与动力工程学院,河南 焦作 454003;3.河南睿智液压设备有限公司,河南 郑州 451191)
0 引 言
柱塞泵在运行过程中发生故障时,会形成微弱的特征信号,并产生调制现象,从而淹没在背景噪声中。该现象显著提高了柱塞泵故障特征的提取难度,从而更难以获得其准确的模式识别效果[1-4]。
相对于小波分解与EMD分解过程,变分模态分解不需要设置大量调节参数,并且可以消除模态混叠和端点效应的问题,使信号被分解成包含多种中心频率的有效带宽,因此,该方法被广泛应用到了信号处理领域[5-8]。陈东宁[9]从VMD模态分量中选择了跟原始信号互相关系数达到0.3以上的IMF分量,实施了信号重构,通过测试发现,该方法能够对轴承故障进行精确诊断。刘岩[10]按照谱峭度差异重构了VMD分解形成的各分量,同时引入了MOMEDA算法,完成了对滚动轴承的故障诊断。
在采用相关系数选择法进行处理时,由于只获得了少数分量,此时在最初发生故障的过程中形成的故障信号强度非常低,无法对这些信号进行准确诊断,有些特征信号也被判断成噪声信号而被去除。因此,利用单一尺度DE已不能从柱塞泵复杂振动信号中准确分辨故障信息,此时首先需要对其信号实施多尺度分析[11-13]。
目前的研究多是通过变分模态分解特征能量重构法(VMD)来实现对故障的分析,但变分模态分解特征能量重构法在实际使用过程中,存在准确性不高的问题。
为了提高测试的准确性,本文设计一种通过变分模态分解特征能量重构法(VMD)和多尺度散布熵实现的柱塞泵滑靴磨损故障诊断方法,来分析在正常状态与不同位置时柱塞泵滑靴端面的磨损状态。
1 数学模型
1.1 VMD分解层数K确定方法
根据VMD算法简介可以发现,以该算法对信号进行处理需要先确定分解层数K。无论是EMD分析方法还是中心频率观察法,在进行分析时需要参考前期的经验,耗费大量时间,并且也不能保证其准确性。因此,可以选择能量变分模态分解(VMD)算法来实施分析,同时以能量收敛因子为判据,来完成对K值自适应分析,从而获得更快的处理速率,并提高其准确性[14-16]。
笔者将能量收敛因子表示成一定的形式,对原始信号先通过VMD分解获得能量余量,再跟原始信号能量进行比较[17]。
其中,能量收敛因子为相邻两分解层数能量比的差值,其表达式如下:
(1)
式中:f—原始信号;uk—第k(k=1,2,…,K)个模态函数;K—分解层数。
1.2 特征能量占比VMD重构(VMD)
为了发挥通过VMD方法获取的IMF信息的功能,防止因为只选中其中部分相关系数,或出现高峭度IMF参数二导致信号重构过程中的微弱故障信号去除问题,笔者设计了一种建立在特征能量占比(FER)基础上的信号重构方法[18]。
其具体计算步骤如下:
(1)假定VMD分解得到的K个IMF信号序列是x=(x1,x2,…,xK),之后计算得到各IMF的Fk。
将FER表示为Hilbert包络谱包含的前h倍频特征频率能量与总能量之比,将该比值作为判断特征信息的贡献度,即:
(2)
式中:Eh—第k个IMF的Hilbert包络谱特征频率在h倍频处对应的累积能量。
(2)统计每个FER的模态占比。
其表达式为:
(3)
(3)计算IMF归一化后的重构权重β。
即:
(4)
(4)计算重构信号。
即:
(5)
VMD多尺度散布熵故障诊断流程如图1所示。

图1 故障诊断基本流程图
2 信号收集以及分解、重构
2.1 信号收集
在柱塞泵保持正常运行状态,与滑靴端面达到0.1 mm、0.2 mm以及0.3 mm磨损程度时,笔者依次采集A10VS045型产生的的振动信号,控制采样频率为24 000 Hz,持续采样0.2 s,共采样4 800点,分别对各状态收集60组样本。
数据采集仪为MI-7016型。
信号采集方案如图2所示。

图2 柱塞泵磨损信号采集方案1—电动机;2—柱塞泵;3—加速度计;4—过滤器;5—压力表;6—溢流阀;7—油箱
将系统主油路压力设定在10 MPa,同时控制电机转速为1 500 r/min;共包含9个柱塞数,通过计算获得柱塞振动基频为225 Hz。
加速度传感器沿z方向产生的通道故障信号表现出最高峭度值[19],该结果说明柱塞在工作期间发生滑靴磨损引起斜盘冲击振动,是通过柱塞、滑靴以及缸体被传输到柱塞泵的端盖部位,这跟之前振动作用机制与故障信号传递路径一致,因此,可以分析该通道信号。
4种状态信号的时域变化情况如图3所示。
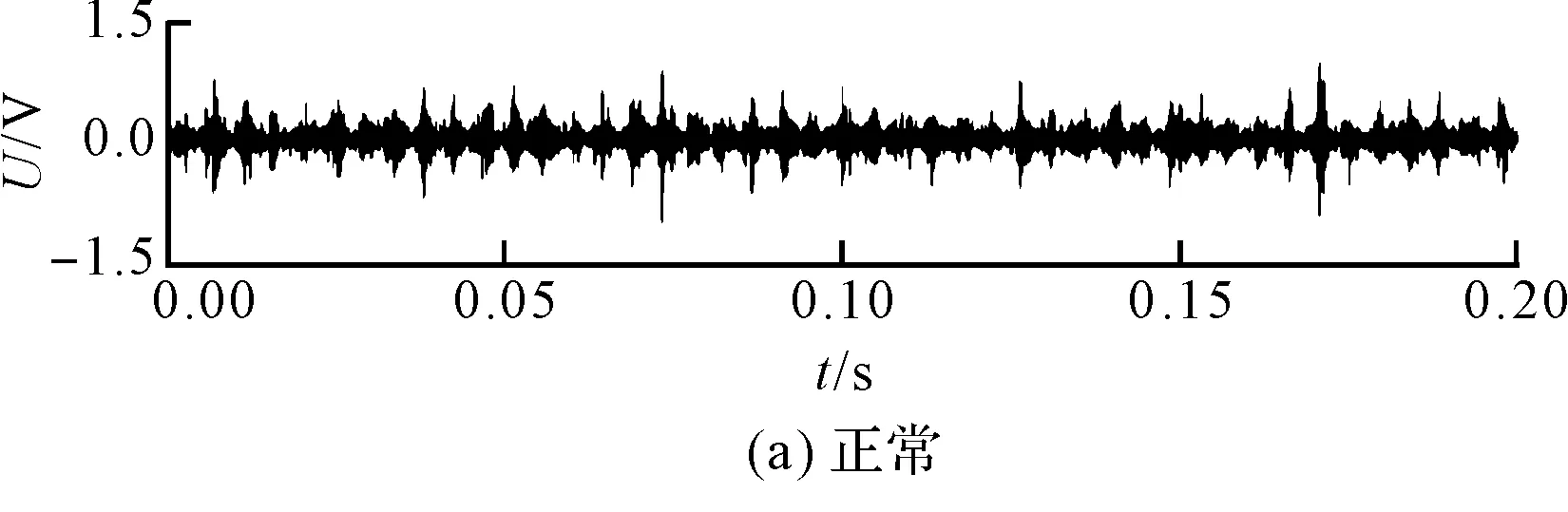
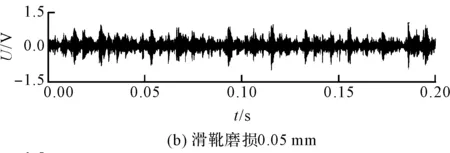
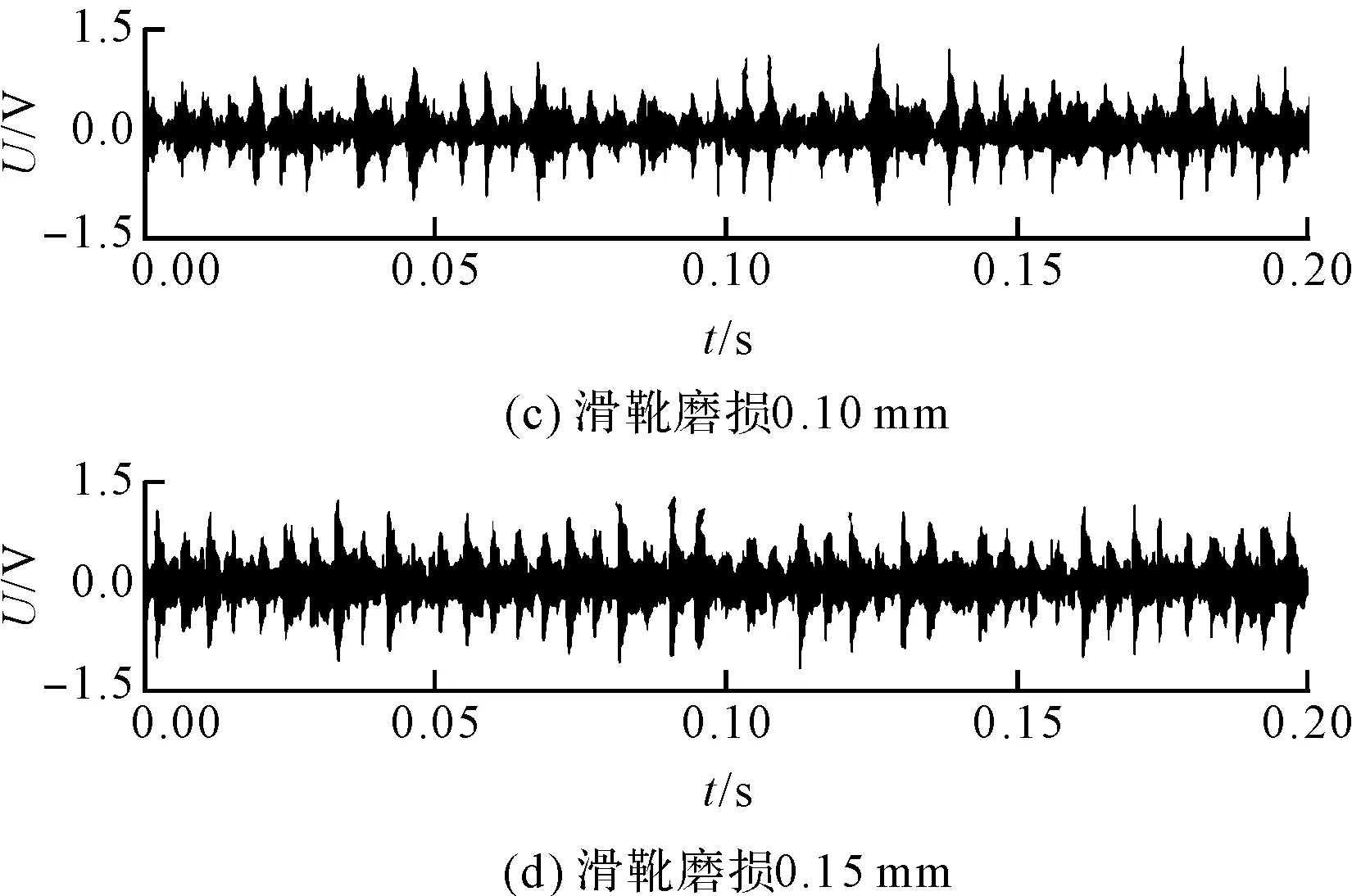
图3 4种状态信号时域图
图3中,信号具有典型的波动特性,可以作为基础信号进行后续研究;而且不能从时域图内准确分开4种状态,因此,需要对信号进行VMD分解和重构。
2.2 信号VMD分解和重构
针对各IMF分别计算特征能量占比Fk,柱塞与转轴振动基频分别为225 Hz与25 Hz,前者相对后者发生显著增大,因此,Eh按照上述特征频率的前8倍频累积能量进行计算。
接着计算IMF重构权重βk,同时计算归一化重构权重。
重构权重计算结果如表1所示。
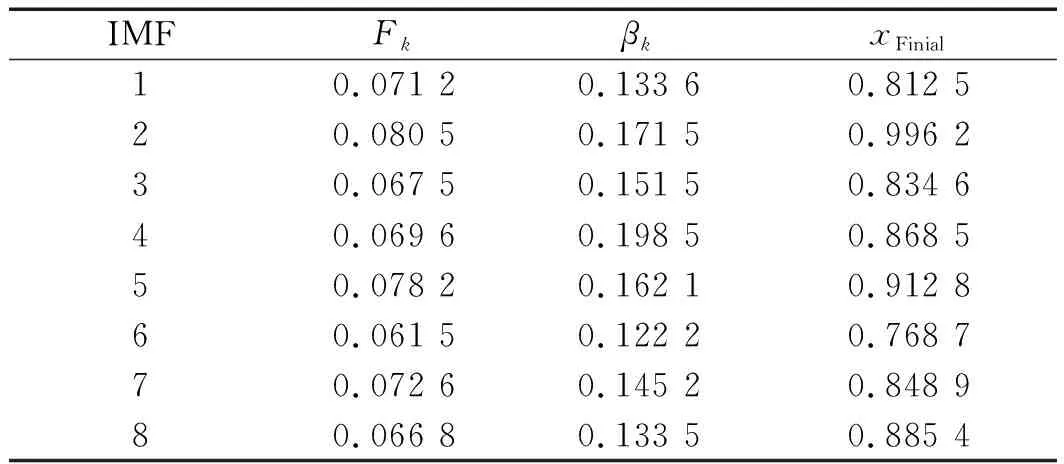
表1 重构权重计算结果
对表1中数据进行统计,得到以下重构信号:
xFinial=0.763 1x1+x2+0.867 2x3+0.831 4x4+0.947 3x5+0.702 1x6+0.823 6x7
(6)
式中:{xi,i=1,2,…,7}—IMF分量。
原始信号与VMD重构信号Hilbert包络图如图4所示。

图4 原始信号与VMD重构信号Hilbert包络图
图4中,与原始信号进行比较可知,VMD重构信号中高频噪音成分发生了明显降低,因此,可以通过VMD将噪音高频分量有效剔除。
3 结果分析
3.1 特征提取结果分析
笔者对各状态下的多尺度散布熵变化规律进行分析,同时提取得到有效尺度散布熵,并将其作为故障特征向量。
笔者以滑靴磨损为0.05 mm的条件作为研究对象,以尺度因子scale=10,测试了4个状态下的不同时间尺度MDE值。
4种状态MDE值结果如图5所示。

图5 4种状态MDE值
图5中,与正常MDE相比,不同程度的滑靴磨损后,其振动信号MDE均表现出明显的降低变化,表明该方法对处理振动信号是有效的;逐渐增加时间尺度之后,可以促进粗粒化序列发生随机性的降低,并减小复杂度,这使得4种状态下MDE都出现了减小的结果,同时获得了更小的差异;正常信号到第2时间尺度时出现了MDE的峰值,在其余各状态下都是第1时间尺度。
VMD重构信号峰值多尺度散布熵结果如图6所示。

图6 VMD重构信号峰值多尺度散布熵
图6中,正常信号达到了最高MDE值,说明正常信号含有最复杂的成分;其余3种滑靴磨损故障信号都表现为随故障程度增大发生了MDE值降低的现象,说明故障程度增大后,形成了更加规律的变化过程;同时发现,4种状态都非常便于区分。
从4种状态VMD重构信号中提取得到MDE值,并将其作为故障特征向量。
为了对VMD优越性开展验证,计算得到的VMD相关系数重构信号MDE参数结果如图7所示。

图7 VMD相关系数重构信号峰值多尺度散布熵
图7中,通过测试可知,在正常状态和滑靴磨损达到0.10 mm时对应的VMD相关系数重构信号MDE都保持稳定状态;在其余2种状态下则发生了较大波动,并存在相互混淆现象,不能准确反馈故障程度变化特征。
3.2 模式识别结果分析
为定量评价采用上述特征提取方法进行分类处理时引起的实际效果变化,笔者按照随机的形式从不同状态下选择得到30组训练样本,经过训练后再对剩下的20组样本进行测试,再利用MDE完成模式识别。
不同特征提取方法ELM分类结果如表2所示。

表2 不同特征提取方法ELM分类结果
表2中,采用本文方法达到了98.1%的分类准确率,相对于VMD相关系数重构法的分类准确率提升了近8%。
同时,该方法运行时间与其他方法相近。相对于其他方法,采用所提方法诊断柱塞泵滑靴磨损故障时,获得了更快的分类速率与更高的准确性。
不同分类器识别结果如表3所示。

表3 不同分类器识别结果
表3中,VMD-MDE相对SVM的训练时间缩短了约11%,同时测试精度提升了约17%。并且,SVM需要进行参数调节,显著增加了处理时间。
综上所述,与SVM方法相比较,VMD-MDE方法具备更快分类速度与更高精度,能够保障对柱塞泵磨损振动信号的故障诊断。
4 结束语
针对通过变分模态分解特征能量重构法(VMD)来实现对故障的分析时存在准确性不高的问题,笔者设计了一种建立在特征能量占比(FER)基础上的信号重构方法,提出了通过变分模态分解特征能量重构法(VMD)和多尺度散布熵实现的柱塞泵滑靴磨损故障诊断方法;并通过测试数据对仿真结果进行了验证。
研究结果表明:
(1)逐渐增加时间尺度的过程中,粗粒化序列的随机性和复杂性都明显下降。故障程度增大后,形成了更加规律的变化过程;
(2)相对于其他方法,采用所提方法诊断柱塞泵滑靴磨损故障时获得了更快的分类速率与更高的准确性。VMD-MDE相对SVM的训练时间缩短了11%,同时测试精度提升了17%。
本研究对提高柱塞泵磨损振动信号提取及故障诊断具有一定的借鉴价值。但由于不同类型故障可以具备相同类型的故障特征频率,对柱塞泵复合故障类型进行诊断研究值得进一步探索。
