一种基于多传感器组合的磁浮列车定位方案
2021-09-26邬忠萍郭金莹侯宇婷陶汉卿
蔡 煊,邬忠萍,郭金莹,侯宇婷,陶汉卿
(1.成都工业学院汽车与交通学院,成都 611730; 2.柳州铁道职业技术学院电子技术学院,广西柳州 545616)
磁浮列车定位技术是磁浮运控系统的关键技术之一,测速定位功能是磁浮列车运行控制的基础。由于磁浮列车不依赖轮轨接触而是通过电磁力来实现列车悬浮、驱动以及导向,传统的诸如通过测量车轮转速计算列车运行速度和走行距离的轮轨列车测速定位方法并不适用于磁浮系统。文献[1-2]介绍了上海磁浮示范运营线的列车定位技术,主要采用“定位标志板识别+长定子齿槽计数”的绝对定位和相对定位相结合的定位方式。文献[3]设计了一种用于磁浮列车测速定位的新型交叉感应回线系统。文献[4]研究了一种基于钢轨枕的中低速磁浮列车组合测速定位方法。文献[5-6]综述了各种适用于磁浮列车的测速定位方法,包括交叉感应回线定位法、计数轨枕定位法、全球导航卫星系统(Global Navigation Satellite System,GNSS)定位法、长定子齿槽检测定位法、查询/应答器定位法、雷达测速定位法等,并分析比较了各种定位技术的优缺点,同时指出基于GNSS的多传感器组合定位系统是磁浮列车定位技术的重要发展方向之一,但并未构建具体系统以及验证系统定位性能。通过相关文献可以看出,现有磁浮列车定位方法大多需基于轨旁设备实现定位功能,普遍存在结构复杂、建设及维护成本高、可移植性差等问题。本文根据磁浮列车运行控制对列车定位的具体功能需求,采用北斗卫星导航系统、多普勒测速雷达、惯性单元以及轨道电子地图,构建了一种成本较低的磁浮车载组合定位系统,将磁浮列车定位功能尽量建立在车载环境中并能保证连续、可靠的测速定位,最后通过实验室内部搭建的仿真测试平台验证了该组合定位系统的性能。
1 组合定位方案
GNSS可为列车提供实时的绝对位置和测速信息,为轨道车辆定位提供了一种低成本且高效的解决方案[7],但卫星定位同时也存在由于信号被遮挡导致定位精度较差甚至失效等缺陷,单独使用卫星定位无法有效保证列车定位的可靠性和连续性,还需结合其他定位手段共同实现列车定位功能。目前针对GPS在铁路施工、灾害监测、列车定位等中的应用研究已有很多,但基于我国自主建设的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)的相关研究还较少。BDS系统作为我国自主研发的全球卫星系统,与GPS系统在系统结构、导航定位原理、调制解调方式等方面都很相似[8],但BDS系统还具有诸如通信/导航一体化、自带广域差分增强等独特优势[9-10],因此对BDS系统在我国交通、通信、国防等重要领域中的应用展开研究具有重要的现实意义。
本文采用BDS系统作为磁浮列车的主要定位手段,采集列车的低频绝对定位信息,同时利用多普勒雷达、惯性测量单元采集高频相对定位信息,再辅以轨道电子地图进行匹配定位,从而构建一种绝对/相对定位功能完整的磁浮车载组合定位系统。在该组合定位系统中,利用BDS系统实时测量磁浮列车的位置和速度信息,当BDS系统短时失效时利用轨道电子地图辅助多普勒雷达和惯性测量单元来保证磁浮列车定位的连续性和可用性,该组合定位系统结构如图1所示。
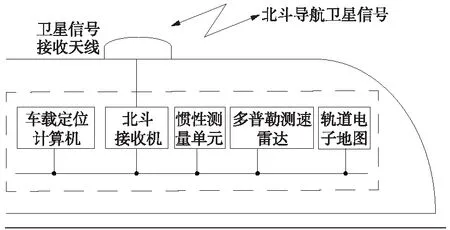
图1 磁浮车载组合定位系统结构
2 定位原理及流程
2.1 基于北斗系统的磁浮列车定位
在磁浮列车上安装北斗卫星接收机及卫星接收天线,接收当前空域北斗导航卫星播发的星历数据,即可解算得到列车接收机的实时绝对位置。与GPS类似,常用的机动载体北斗定位方法为伪距定位法[11],列车接收机接收北斗卫星播发的星历数据并进行相关运算,从而获取该信息从北斗卫星到列车接收机的传输时间,乘以电磁波在空气中的传播速度(光速),得到列车接收机与对应北斗卫星之间的距离。由于列车接收机时钟、各导航卫星时钟与北斗系统标准时钟之间均存在时钟误差,因此该距离为伪距。各导航卫星的时钟误差可由北斗地面监控站测出和修正,列车接收机时钟误差则作为一个待求解参数与列车位置坐标一并求解。除了绝对位置坐标,还能通过列车接收机同时解算出磁浮列车的实时速度、运动方向等参数。基于北斗系统的磁浮列车定位原理如图2所示。
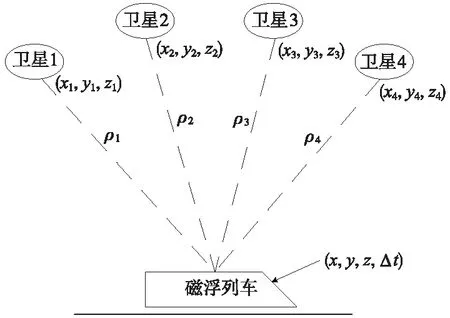
图2 基于北斗系统的磁浮列车定位

(1)
式中,ρi为列车卫星接收机到第i颗北斗卫星的伪距;(xi,yi,zi)为第i颗北斗卫星的三维空间位置,可由已知星历数据获取;(x,y,z)为待求解的列车卫星接收机三维位置;c为光速;Δt为列车卫星接收机的时钟误差。
2.2 基于多普勒雷达的磁浮列车定位
多普勒雷达测速测距是将雷达传感器安装在磁浮列车底部,通过雷达以一定倾斜角度向轨道平面发射电磁波,并接收轨道平面反射的回波信号,基于多普勒频移效应原理,实时测量雷达发射波频率和反射波频率之间的频率差值(多普勒频移量)便可计算得到磁浮列车相对于轨道平面的移动速度,对速度积分可获得列车里程增量
(2)

多普勒雷达测速测距误差主要由列车振动、雷达安装角度误差以及自身固有测量误差等造成。在雷达诸项误差因素中,列车纵向高频小幅振动对雷达测速精度影响最大[12]。采用詹纳斯配置方式可有效减少列车振动造成的测速测距误差。具体方法为,在列车底部以相反方向安装2个雷达,如图3所示。采用詹纳斯配置方式后,可将列车纵向振动造成的雷达测速误差从|vk,h/vk|(vk,h为k时刻列车纵向振动速度)数量级减少到10-8~10-7数量级,使得该项误差可以忽略。
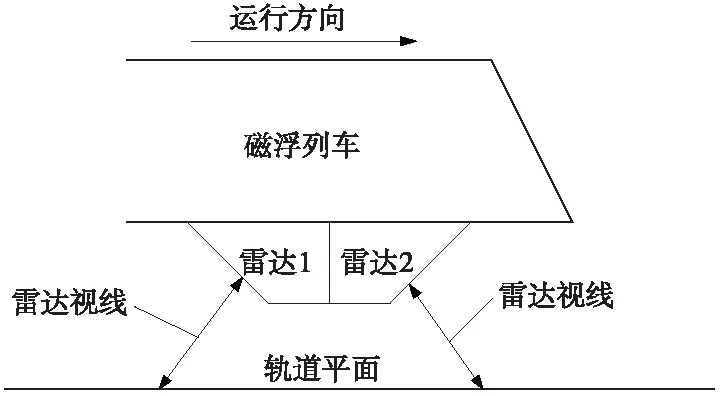
图3 基于多普勒雷达的磁浮列车定位
2.3 基于惯性测量装置的磁浮列车定位
与轮轨系统相似,为保证磁浮列车安全平稳运行,磁浮轨道线路大部分为长直线并根据需要采用小部分曲线线路,列车运行轨迹受轨道约束。因此可近似认为磁浮列车在平面内运行,列车的俯仰、横滚等姿态变化以及垂向速度可以忽略。基于以上机动载体运动特征合理假设,可对传统的惯性导航系统(Inertial Navigation System,INS)进行简化处理,采用单轴角速率陀螺仪和单轴加速度计构成惯性测量单元(Inertial Measurement Unit,IMU)[13-14]应用于磁浮列车的测速定位。基于IMU的磁浮列车定位原理如图4所示。图4中下角标n、b分别表示平面坐标轴X、Y的导航坐标系和载体坐标系,φk表示磁浮列车的实时航向角,(xk,yk)表示磁浮列车的实时位置。
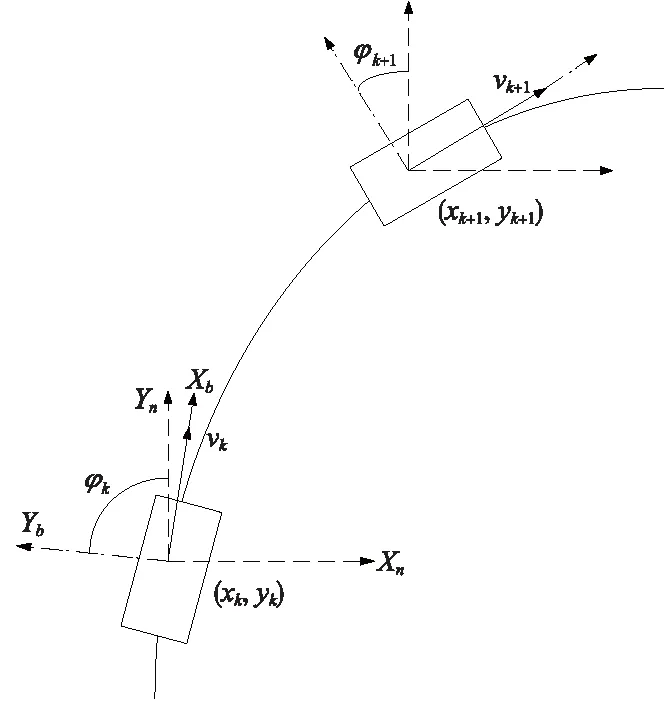
图4 基于IMU的磁浮列车定位
通过单轴角速率陀螺仪实时测量垂直于磁浮列车运行平面方向的转动角速度ωb,k,通过单轴加速度计实时测量磁浮列车运行方向的加速度fb,k。在利用北斗定位信息辅助IMU初始对准的前提下,对ωb,k积分可获得磁浮列车的实时航向角φk,对fb,k在每一个测量周期内积分可获取磁浮列车的速度vk和里程lk,然后对第k周期的里程增量Δlk(Δlk=(lk-lk-1))基于φk在二维平面内进行分解即可得到第k周期磁浮列车的平面位置坐标
(3)
不难看出,IMU定位是一种典型的航迹推算法,计算量少、自主性高以及短时定位精度高,但其位置误差随时间累积,不适合单独用于磁浮列车的长时定位,因此可利用多普勒雷达测速测距信息与其相互辅助,不断校正IMU的累积误差。
2.4 基于轨道电子地图辅助的磁浮列车定位
利用测绘测量等手段建立包含轨道线路完整的曲率、坡度、道岔点等特征数据的数据库,在此基础上即可建立整个轨道线路绝对公里标与各类特征参数逐一对应的轨道电子地图[15-17]。在轨道车辆定位中应用电子地图匹配定位具有计算量少、匹配精度高等明显优势,但轨道地图匹配定位无法单独完成列车定位功能,在本文的磁浮列车组合定位方案中,轨道电子地图匹配定位可作为雷达/IMU组合的有效辅助。
在磁浮北斗定位短时失效发生时,将最后一个北斗有效定位结果作为磁浮列车的参考初始位置,利用雷达/IMU组合测量和计算列车速度和里程,有效保证磁浮列车定位的连续性和可用性,同时将IMU中的角速率陀螺仪获取的列车姿态信息与曲率、坡度等存储在轨道电子地图中的轨道线路特征参数进行匹配,即可获取磁浮列车的绝对公里标位置,利用该绝对位置信息即可对雷达/IMU组合的里程累积误差进行有效校正。基于轨道电子地图辅助的磁浮列车定位原理如图5所示。
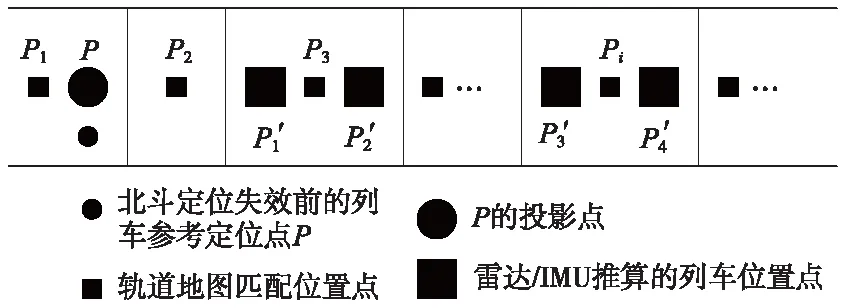
图5 基于轨道电子地图辅助的磁浮列车定位
2.5 定位流程
(1)首先基于BDS系统定位数据初始化磁浮列车运行状态;(2)如果BDS系统正常工作,则基于BDS系统连续测量磁浮列车位置和速度参数;(3)若发生BDS系统短时失效,则以BDS失效前一时刻获取的有效卫星定位数据作为参考基准,利用雷达/IMU组合持续推算磁浮列车的运行速度和里程增量,同时利用轨道电子地图匹配方式辅助校正雷达/IMU组合的里程累积误差,在此基础上通过分解计算获取磁浮列车二维平面位置坐标;(4)当BDS系统恢复正常后再次转入北斗为主的定位模式,并以卫星定位数据对IMU进行初始校准;(5)不断循环(1)~(4)直到列车运行停止。
3 仿真验证
为检验本文构建的磁浮车载组合定位系统的定位性能,在实验室环境下搭建的仿真测试平台上进行仿真验证,该平台结构如图6所示。
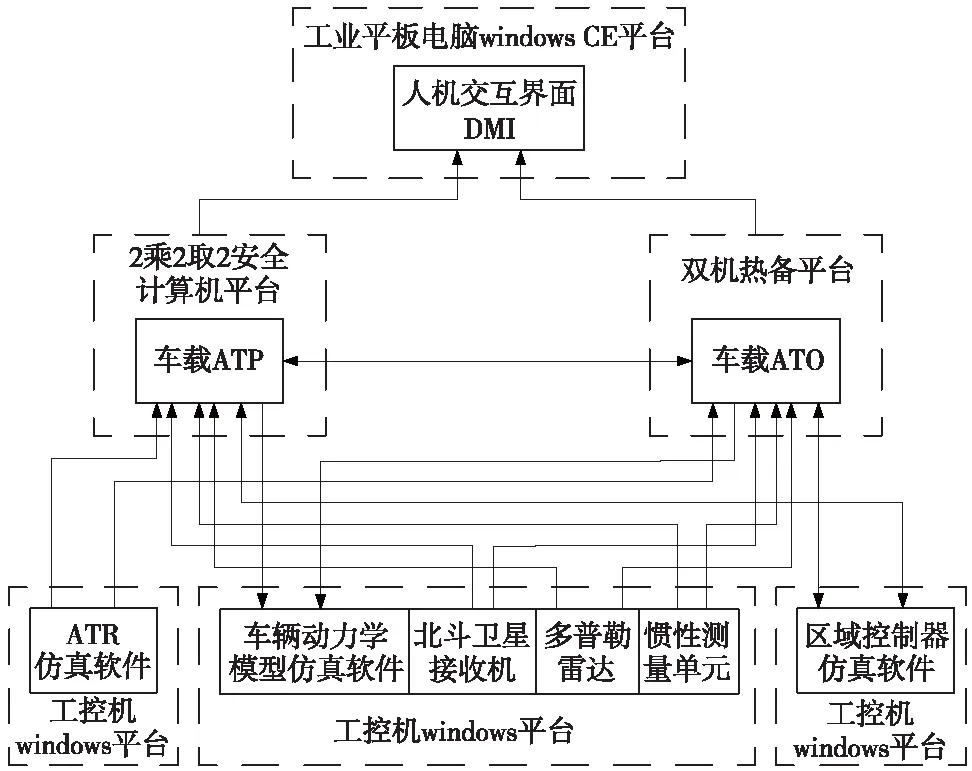
图6 仿真测试平台结构
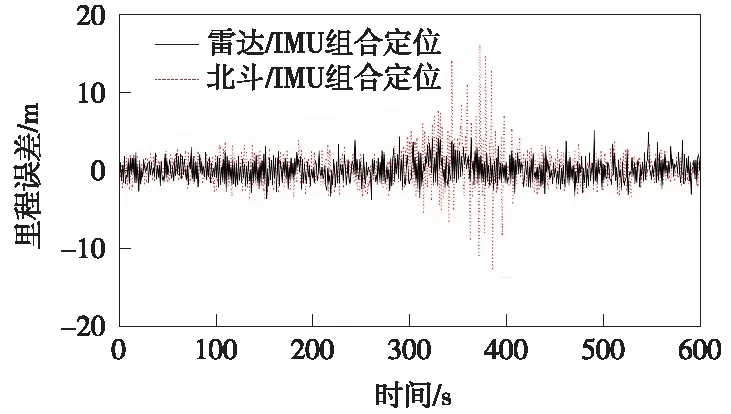
图7 组合定位里程误差
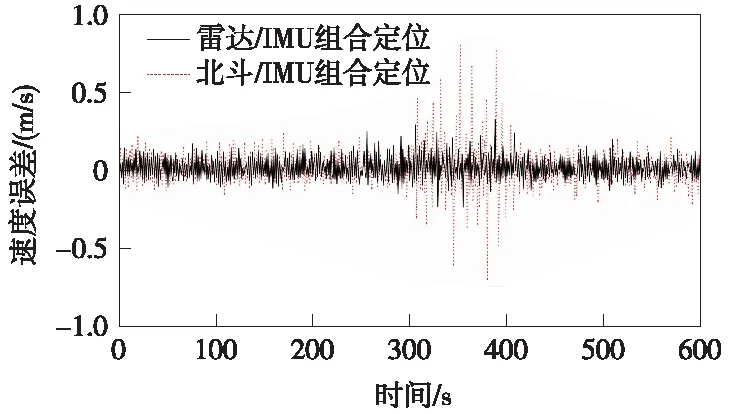
图8 组合定位速度误差
由图7可见,在北斗/IMU组合定位模式下,里程误差总体上较小且平稳,但在300~400 s北斗失效时段内,由于缺少卫星定位结果的校正,IMU单独定位的里程误差呈现出逐渐发散的趋势,与其自身误差特性一致。而在300~400 s北斗失效时段内,在轨道地图匹配辅助的雷达/IMU组合定位模式下,里程误差总体上保持平稳无明显发散迹象,表明了轨道电子地图辅助雷达/IMU组合的有效性。同样,由图8可见,在300~400 s北斗失效时段内,由于缺少卫星定位结果对雷达/IMU组合的校正,IMU测速误差明显增大,而在轨道地图匹配辅助的雷达/IMU组合定位模式下,300~400 s时段内的速度测量误差相对收敛,表明轨道意子地图匹配辅助下的雷达/IMU组合定位能将误差有效控制在要求的范围内。
4 结语
针对目前常用的磁浮列车定位方法存在的缺陷,构建了一种结合北斗卫星导航系统、多普勒测速雷达、惯性测量单元以及轨道电子地图的车载组合定位系统并给出了具体定位原理及定位流程。通过实验室环境下的仿真测试,验证了该组合定位方法可以保证磁浮列车定位的精确性和连续性,为磁浮列车定位提供了一种成本较低且理论上可行的替代解决方案。下一步研究考虑将多源信息融合估计算法引入到该组合定位方法中,以获得更优的列车定位参数。另外,受限于客观条件,实验室环境下获取的仿真结果并不能完全真实地反映磁浮列车的运行状态和实际影响因素,后续将寻求搭建真实的磁浮线路车载试验平台并分析验证该组合定位方案的可行性。
