基于树莓派的主动避让式汽车LED大灯设计
2021-09-22易华王文华
易华 王文华
(广东海洋大学电子与信息工程学院 广东省湛江市 524088)
1 引言
汽车大灯应该如何设计,才能既满足明亮的照明需求,又能够兼顾对他人的干扰,人们开展了相关研究[1-3]。在这个不断上下求索的过程中,主动避让式汽车大灯就此诞生了。
近年来,包括奥迪等在内的几个厂家纷纷推出了自己的主动避让式汽车大灯,其实现形式各有不同,但无不例外的是造价高昂,毫无例外的成为了小众产品。人们也开展了其他类型的汽车大灯控制方式[4-5]。本设计则是以树莓派卡片电脑为平台,设计出一种基于计算机视觉的,成本低廉的汽车主动避让式LED大灯。
本文以树莓派为核心,通过红外摄像头获取外界图像,判断行人、行车位置,并且关闭对应的远光灯。避让功能具有延时生效的特性,符合“人文关怀”的时代主题,智能、安全。
2 整体设计方案
2.1 系统的工作原理
本文提出的主动避让式汽车 LED大灯系统主要由树莓派卡片电脑、电源模块、红外摄像头、红外补光灯、车灯照明部件等组成,基础部分为树莓派,核心部分为运行于树莓派内的计算机视觉程序。利用摄像头获取外界图像,通过计算机视觉程序的判断比对确定车辆及行人所在的方位。当计算机视觉程序判断出车辆或行人所在方位时,自动关闭对应方向的远光灯,从而达到主动避让的目的。当用户在关灯情况下打开远光灯,或者是近光切换到远光灯两秒内,主动避让的功能会被禁用,以免影响发送闪灯信号。
2.2 系统结构
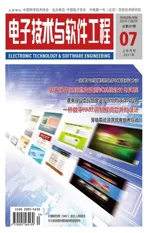
整体设计方案系统结构框图如图1所示,整个设计可以概括为以下几个模块部件:
(1)电源模块:根据各个部件的需求,系统设计时,需要设计一个12V/24VDC-6V/5V/3.6VDC的稳压电源模块,用于给车灯和树莓派供电[2]。为了提高设计效率,以最少的元器件达到最佳的供电性能,电源模块采用四个集成电源来设计。
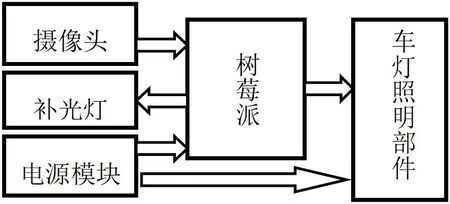
图1:系统整体结构框图

图2:大灯近光原理图
图3:大灯近光的结构

图4:演示模板整体结构图

图5:深度学习训练

图6:主程序流程图
(2)树莓派:作为整个车灯的大脑,对摄像头捕获的图像信号进行对比判断,并将判断结果转化为GPIO的高低电平信号,从而控制车灯的开光。
(3)红外摄像头:使用红外摄像头,实时获取外界图像并传入树莓派进行下一步的处理。
(4)红外补光灯:起到给红外摄像头补光的作用。
(5)车灯照明部件:由LED灯、集成晶体管、反光碗、透镜和外界辅助电路等部分组成,树莓派通过红外摄像头获取的图像经过判断和处理之后,通过GPIO口以高低电平的方式传入车灯照明部件,从而控制集成晶体管开关来达到控制车灯开关的目的。
在进行演示模型的制作时,使用内矩阵式LED透镜大灯作为模型设计的蓝本。设计包括近光和远光部分。其中,近光部分采用椭球反射器和透镜组成,其原理如图2所示,椭球体第一焦点的LED灯珠发射的光线经过椭球反射器的反射,汇集于第二焦点,在第二焦点附件安装挡板,可设计出所需要的光形。通过透镜在路面成一放大的像。近光灯的结构如图3所示。
远光部分,采用漏斗形透镜阵列来将多颗LED灯珠的光尽可能的聚集到前方,5个漏斗形透镜并列,透镜内分别安置一颗LED灯珠,达到内置矩阵的目的。
在设计演示模板的灯体时,同时一起设计电源盒盒树莓派盒,提高系统整体稳定性的同时也起到演示模型的支架作用。如图4为演示模型整体效果图,左右两侧为电源盒和树莓派盒,中间为车灯照明部件,上方为摄像头支架。

图7:主动避让程序流程图
3 软件环境及程序实现
3.1 软件环境
Raspbian是树莓派常见的操作系统,是目前树莓派上最稳定的系统[6]。因此,本文选择Raspbian作为操作系统。
NCNN从设计之初就深刻考虑移动端ARM平台的部署和使用,支持将caあe等的模型转换为NCNN模型。因此,我们采用Caあe进行深度学习模型训练,并使用NCNN作为在树莓派上使用的框架。
OpenCV是一个跨平台的计算机视觉库[7],是目前比较好用的视觉库。
3.2 深度学习模型训练
本文选择MobileNet作为此设计的深度学习模型。MobileNet是由Google的研究者们设计的一类卷积神经网络,它们计算消耗小、运行速度快,将卷积过程分为一个3×3深度方向的卷积和一个1×1点对点的卷积[8]。
本文的设计采用ssd-mobilenet预训练模型来进行训练。由于大灯系统需识别车辆和行人,因此,准备车辆和行人的图片数据作为训练数据。本文的训练库共准备车辆图片34244张,人类图片24293张,如图5所示。程序流程如图6和图7所示。为了提高运行效率,采用C++语言编写程序。
4 系统调试及其结果
首先使用面包板进行GPIO口控制模拟,将装有LED指示灯的面包板与树莓派GPIO口相连,如图8所示。然后在树莓派上编译准备好的C++程序并运行,查看控制效果,如图9所示。检查LED灯珠通电发光是否正常,以及整体光源电路板的通电调试。在树莓派远近光灯的控制正常的情况下,当人在树莓派前走动的时候,远光灯的开光情况,对每一颗灯珠的开关情况进行测试,并调节人在树莓派获得的图像上的坐标与远光灯灯珠开关之间的对应关系,直到恰好能关闭朝向人所在方位的远光灯灯珠时为宜,调试正常之后按照图4安装整体结构。

图8:GPIO口连接调试

图9:GPIO控制效果
经过反复多次的调试,汽车主动避让LED大灯能够达到设计方案的各个要求,系统通电后,树莓派的指示灯亮起,此时远近光关闭,将拨杆拨到近光灯位置,近光灯和近光指示灯亮起,再将拨杆波到远光灯位置,远光灯和远光指示灯亮起,两秒之后,主动避让功能开始生效。
5 结论
LED车灯,与卤素灯和氙气灯相比,更加节能,也更加环保,必定是汽车大灯发展的潮流。而主动避让LED车灯,是一种将车灯与人工智能完美结合的产物,使得车灯变得更加的富有科技感,同时也让车灯变得更安全。本文使用GPIO口来进行主动避让式LED汽车大灯的设计,以OpenCV和NCNN为工具,通过Caあe训练模型,转换为NCNN模型并由OpenCV加载模型,通过红外摄像头获取外界画面,判断是否有行车和行人以及其位置,从而关闭对应的远光灯,调试结果达到了主动避让的目的。