高速摄影和水动力同步测试在冰桨碰撞模型试验中的应用
2021-09-19宋明太
武 珅, 宋明太, 芮 伟
(中国船舶科学研究中心 船舶振动噪声重点实验室,无锡 214082)
船舶在冰区航行时,特别是破冰航行状态,经常导致碎冰块下浸并沿着船体侧面和底面滑动,对船体和螺旋桨、舵等附体结构的正常运行带来影响。对于船舶螺旋桨而言,通常裸露于船艉且浸深较浅,螺旋桨的旋转抽吸作用使得冰水混合流中的冰块靠近桨盘,进而与旋转桨叶发生碰撞和切削作用,直至冰块通过桨盘面。冰块对桨叶的碰撞冲击载荷要高于水动力载荷[1],是造成冰区船舶螺旋桨叶片变形甚至损坏的主要因素,因此开展冰桨碰撞对冰区船舶螺旋桨的性能影响研究具有重要意义。
由于冰水混合环境下的冰桨碰撞作用过程复杂,涉及固-固、固-液、液-汽等多物理场的耦合作用,目前在数值模拟方面还未能建立起全耦合的分析求解方法,多采用分离解耦和假设简化的方法处理[2]。现行的冰区螺旋桨载荷和强度校核规范多是源于模型和实船试验,通过试验反映物理作用现象,再经过理论分析和系列统计回归进行修正参数的选取[3],是解决此类力学问题的主要技术手段。对于冰桨碰撞切削作用的模型试验,国内外学者利用冻结和非冻结冰,已分别在冰水池和拖曳水池、空泡水筒等开展了试验研究工作。Wang等[4]在加拿大IOT冰水池开展了吊舱推进器切削层冰的模型试验,测量了切削过程中螺旋桨的推力和扭矩特性变化。Huisman等[5-6]利用石蜡和树脂的非冻结模型冰在荷兰MARIN水池进行了自由运动冰与螺旋桨碰撞,测试了螺旋桨的多分量水动力性能变化。郭春雨等[7]采用非冻结模型冰,冰块为夹持固定状态,测试比较了螺旋桨在空气中和水中切削模型冰时的推力和扭矩性能差异。相比于螺旋桨切削层冰和固定模型冰块,自由运动冰块存在平动和转动的多自由度,受螺旋桨抽吸流场作用影响,与螺旋桨作用的随机性和不确定性更强,冰桨碰撞螺旋桨水动力随时间和空间变化。因此,在试验过程中如果仅采集螺旋桨水动力曲线,不辅以冰桨碰撞的作用过程图像,难以达到分析冰桨碰撞过程对螺旋桨性能影响规律的目的。由于冰桨碰撞是个瞬态的作用过程,捕捉冰块运动和冰桨碰撞的细节信息需要借助于高速摄影技术,并保证高速摄像和螺旋桨水动力的采集同步,以实现对冰桨碰撞影响的时空同步分析。
关于船舶螺旋桨性能试验的同步测试,主要为研究螺旋桨与流体作用产生的力学声学特征信息之间的关联关系和作用机理,国内外学者研究开发了获取螺旋桨力学、声学和桨叶图像等多特征同步信息的测试技术,已将其应用在螺旋桨空泡、脉动压力和噪声等性能的试验测试中。Pereira等[8-9]利用高速摄像技术记录船尾流场中的螺旋桨空泡形态,通过对比螺旋桨非定常梢涡空泡、片空泡的演变过程和同步采集的脉动压力变化,研究揭示了螺旋桨梢涡空泡、片空泡的周期发展和溃灭过程与脉动压力的特征关系。Song等[10]在空泡水筒开展了桨叶梢涡空泡形态和噪声性能的同步测试试验,通过匹配调节高速相机采集帧数和水听器采样频率,实现桨叶噪声频谱曲线与梢涡空泡形态变化图像的同步采集,进而分析建立了桨叶梢涡空泡的声学模型,研究揭示了桨叶梢涡空泡的发声机制和噪声变化特征。
鉴于此,本文利用空泡水筒模拟冰桨碰撞试验环境,尝试将高速摄像和螺旋桨水动力的同步测试技术应用到冰桨碰撞模型试验中。为获取自由冰块运动和冰桨碰撞过程的螺旋桨水动力性能变化,需要搭建多相机图像与螺旋桨水动力之间的同步采集测试系统,进行多相机的组合布置和触发采集环节的参数匹配调节。然后,综合分析冰块和螺旋桨性能的时空特征变化信息,检验同步测试效果,为研究冰桨碰撞对螺旋桨性能影响提供测试手段。
1 试验模型和测试装置
1.1 螺旋桨模型
本次冰桨碰撞螺旋桨水动力性能试验的测试对象为一只四叶螺旋桨模型[11],桨模直径0.25 m,右旋,盘面比0.72,0.7R螺距比0.817,如图1所示。桨模材料暂选用铝合金,还未考虑实船冰区螺旋桨的材料特点而选择高强度的铜桨或不锈钢桨,本次模型试验的主要目的是搭建同步系统和检验测试效果。
1.2 模型冰
试验模型冰在中国船舶科学研究中心的小型冰水池制备,冻结层冰的冰力学特性参数如表1所示。表1中冰厚和冰力学特性参数的选取主要是参考试验桨模缩尺比和柯西相似关系,考虑到模型试验是在常温空泡水筒中进行,模型冰的冰力学特性参数会随温度的变化而变化,因此给出了试验模型冰的冰力学特性参数变化范围。

表1 试验层冰的性能参数Tab.1 Performance parameters of test level ice
将冻结层冰预切割成三种尺寸的长方体冰块,冰厚相同,长和宽分别为40 mm×40 mm、60 mm×60 mm和80 mm×80 mm,每种40块,以满足不同测试工况和重复性试验要求。试验模型冰样如图2所示。
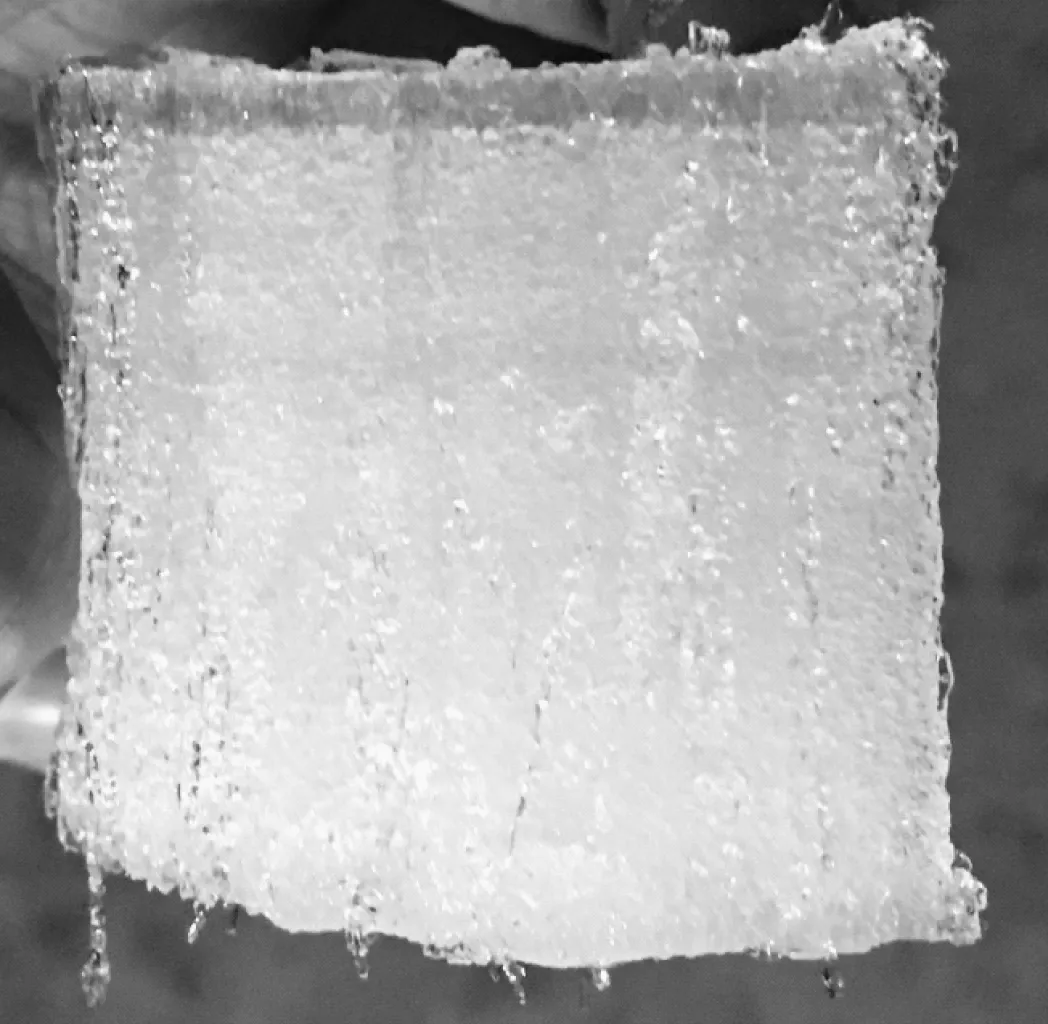
图2 试验模型冰块Fig.2 Test model ice
1.3 测试装置
模型试验在中国船舶科学研究中心的空泡水筒中进行。空泡水筒的工作段直径0.8 m,长度3.2 m,水速范围3~20 m/s,压力调整范围8~400 kPa,最低空泡数(无模型)0.15。空泡水筒长轴动力仪的推力、扭矩和转速测试量程分别为4 000 N、500 N·m和4 500 r/min。
试验中采用两台高速相机,一台视角较大用于记录冰桨相对运动和碰撞切削的整体作用效果,型号为Photron APX,帧率最高可达到8 000 fps,分辨率为1 024×512,空间分辨率每像素约0.18 mm。另一台高速相机则聚焦于螺旋桨叶片,主要捕捉模型冰与桨叶的碰撞破坏过程,型号为Photron SA4,帧率和分辨率均与前者一致,空间分辨率每像素约0.13 mm。同时,为满足高速相机高帧率对进光量的要求,在模型试验中配备了4 000 W的照明灯进行补光。
2 测试方法
如图3所示,螺旋桨模型安装于空泡水筒的长轴动力仪上,模型冰位于螺旋桨来流前方,由长臂夹进行夹持布放,两台高速相机和照明灯均位于空泡水筒的同侧面。为了实现冰桨碰撞过程中高速摄像和螺旋桨水动力性能的同步测量,分别从两台高速相机上引出信号同步控制线,首先通过两台高速相机触发采集环节参数的匹配调节实现多相机的图像采集同步。然后,将信号同步线的一端与水动力数据采集系统相连,另一端与图像采集控制系统连接。对螺旋桨水动力时域信号进行采集时,在模型冰释放前由图像采集控制系统触发信号控制两台高速相机开始图像拍摄,与此同时发出上升沿电压信号,该信号由水动力数据采集系统接收,并与螺旋桨水动力测试信号同步输出。
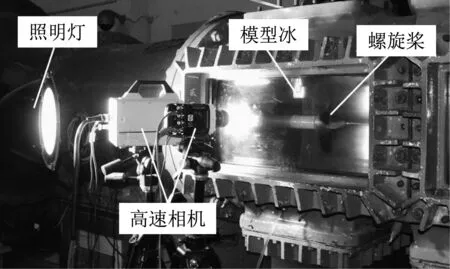
图3 模型试验布置Fig.3 Model test arrangement
试验前首先进行模型冰块的布放位置调节,通过空泡水筒上盖口、钢板尺、卡尺等对长臂夹位置进行轴向、径向和垂向定位。采用桨轴中心线和桨盘面作为垂向和轴向的基准位置,分别将夹持冰块点到桨轴中心线和桨盘面的距离作为施放碎冰块的垂向和轴向相对位置,而在径向上保证从空泡水筒自上而下看长臂夹与桨轴中心成一条直线。在试验中选取2个垂向位置,均位于桨轴上方,距桨轴中心线分别为D/2和D/4;2个轴向位置,均在螺旋桨来流前方,距桨盘面分别为D和D/2,所以模型冰块共有4个初始释放位置。以高速相机的拍摄视角看模型冰与螺旋桨的位置关系,4个释放位置(D、D/2)、(D、D/4)、(D/2、D/2)和(D/2、D/4)分别称之为左上、左下、右上和右下方。
本文为冰桨碰撞对螺旋桨性能影响的初次机理性试验,主要关注在螺旋桨旋转抽吸作用下的冰块运动和冰桨碰撞特性,因此本次试验空泡水筒没有开水速,仅螺旋桨以给定转速转动。试验时将空泡水筒的上盖板打开,水筒中注水至上盖口,螺旋桨设定2个试验转速分别为15 r/s和20 r/s。待螺旋桨旋转抽吸流动稳定后,由长臂夹深入水筒至不同指定位置释放模型冰块,模型冰块被抽吸至桨盘面而发生冰桨碰撞切削作用。模型试验共包括3种尺寸冰块、4个初始释放位置和2个螺旋桨模型转速,所以共有24个试验工况。考虑到冰块与螺旋桨运动、冰桨碰撞破坏过程存在一定的随机和不确定性,在每组工况进行了5次重复性试验测试,因此共进行了120次冰桨碰撞模型试验测试,同步测量了不同几何尺寸冰块、不同初始释放位置和不同螺旋桨转速下的冰块运动、碰撞破坏过程和螺旋桨的水动力系数变化。
3 测试结果分析
图4给出了试验采集到的一组螺旋桨模型推力时历变化和高速摄像的同步信号曲线,实线为去掉螺旋桨模型水动力均值后以零点为波动变化的推力时历信号曲线,虚线为高速相机的信号线。
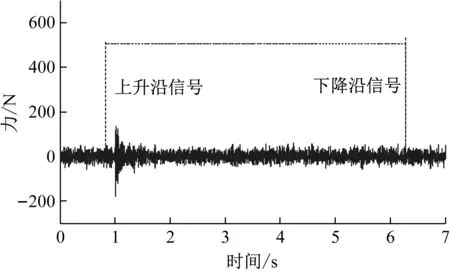
图4 水动力和高速摄像同步信号曲线Fig.4 Hydrodynamic and high-speed video synchronization signal curves
从图4可以看出,1.0 s左右时刻发生的冰桨碰撞使得桨模推力曲线出现明显的跳动,并在冰块碰撞结束后衰减至稳定。而在螺旋桨模型推力的采集过程中,由高速相机图像采集控制系统给出触发信号,进而得到上升沿电压信号开始图像采集,根据高速相机的最大图像存储量和采集帧数计算得到图像的采集时长,作为下降沿信号结束同步采集。
图5和图6给出了图4中同步采集信号的上升沿和下降沿触发时刻附近曲线的放大图,通过采样点和采样时刻可计算得到同步采集时长为5.458 7 s,而高速相机采集相片的存储量为10 917张图片,采集帧数设置为2 000 fps/s,总采集时长为5.458 5 s。对比图像采集时长和水动力上升沿到下降沿的采集时长可见,同步误差在0.2 ms。此外,从图5和图6中的上升沿和下降沿电压信号变化存在一定斜率可以看出,从触发至信号稳定所需的时间在0.5 ms左右,而桨模推力的采样频率为3×104,高速相机的采样间隔为0.5 ms,本试验的高速摄影和水动力同步采集误差应小于1 ms。可见,同步测试在冰桨碰撞螺旋桨水动力性能试验中取得了良好的应用效果。

图5 上升沿触发时间Fig.5 Trigger time of the rising edge

图6 下降沿触发时间Fig.6 Trigger time of the falling edge
由于本次冰桨碰撞模型试验存在多个测试工况,而且在相同工况下冰块与螺旋桨的碰撞作用过程也不尽相同,因此研究冰桨碰撞对螺旋桨性能影响需要借助于试验数据曲线和冰桨时空变化信息来进行综合分析,下面从中选取两组典型冰桨碰撞作用过程进行具体说明,工况如表2所示。

表2 典型试验工况Tab.2 Typical test condition
图7为工况1冰块运动、冰桨碰撞破坏过程和螺旋桨模型推力的同步采集测试结果。需要指出的是,图中的桨模推力截取了从冰块运动靠近桨模到冰桨碰撞作用结束段的时历变化曲线,在曲线上选取部分时刻点(A~O),分别给出了两台高速相机在对应时刻采集到的图片。
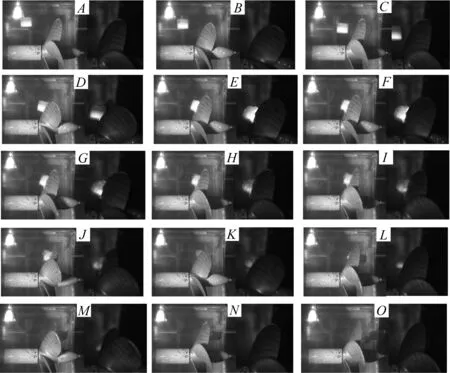

图7 高速摄像和螺旋桨模型推力的同步测试结果(工况1)Fig.7 Test results of high-speed video and model propeller thrust synchronization measurement (case 1)
从图7可以看出,两台高速相机分别从整体和局部视角同步采集到了冰块运动和冰桨碰撞作用过程。总体来看,在右上方位置释放后,自由状态模型冰在螺旋桨抽吸力、重力和浮力的综合作用下,约在D时刻运动至桨盘面,与旋转桨模的4号桨叶导边发生碰撞切削作用,直到J时刻破碎,然后向螺旋桨下游方向运动。从该工况模型冰的碰撞破碎过程来看,模型冰形状和尺寸为40 mm×40 mm×40 mm的立方体,为三种模型冰中的最小尺寸,模型冰受到桨模4号桨叶的单次碰撞切削作用,即被切穿破碎而通过桨盘。
对比图7桨模的推力变化曲线也可以看出,在发生冰桨碰撞作用前,即A、B、C以及之前时刻,桨模的均流水动力采集成稳定小幅波动状态。在D时刻左右开始出现异常脉动,在整个D~J时间段内冰桨碰撞导致的脉动幅值要远大于水动力作用,由于本次工况发生现象为冰桨的单次碰撞,在初次的推力脉动即达到冲击峰值,如图中F时刻。而在K时刻向后,虽然冰桨碰撞过程已经结束,但由于长轴动力仪受到冰桨碰撞的激励作用,此时采集到的桨模推力会比碰撞前出现较大波动,并随时间不断衰减。
图8给出了工况2冰块运动、冰桨碰撞破坏过程和螺旋桨模型推力变化的同步采集测试结果,包括冰桨碰撞过程的桨模推力时历变化曲线和部分时刻点(A~R)的两台高速相机采集图片。

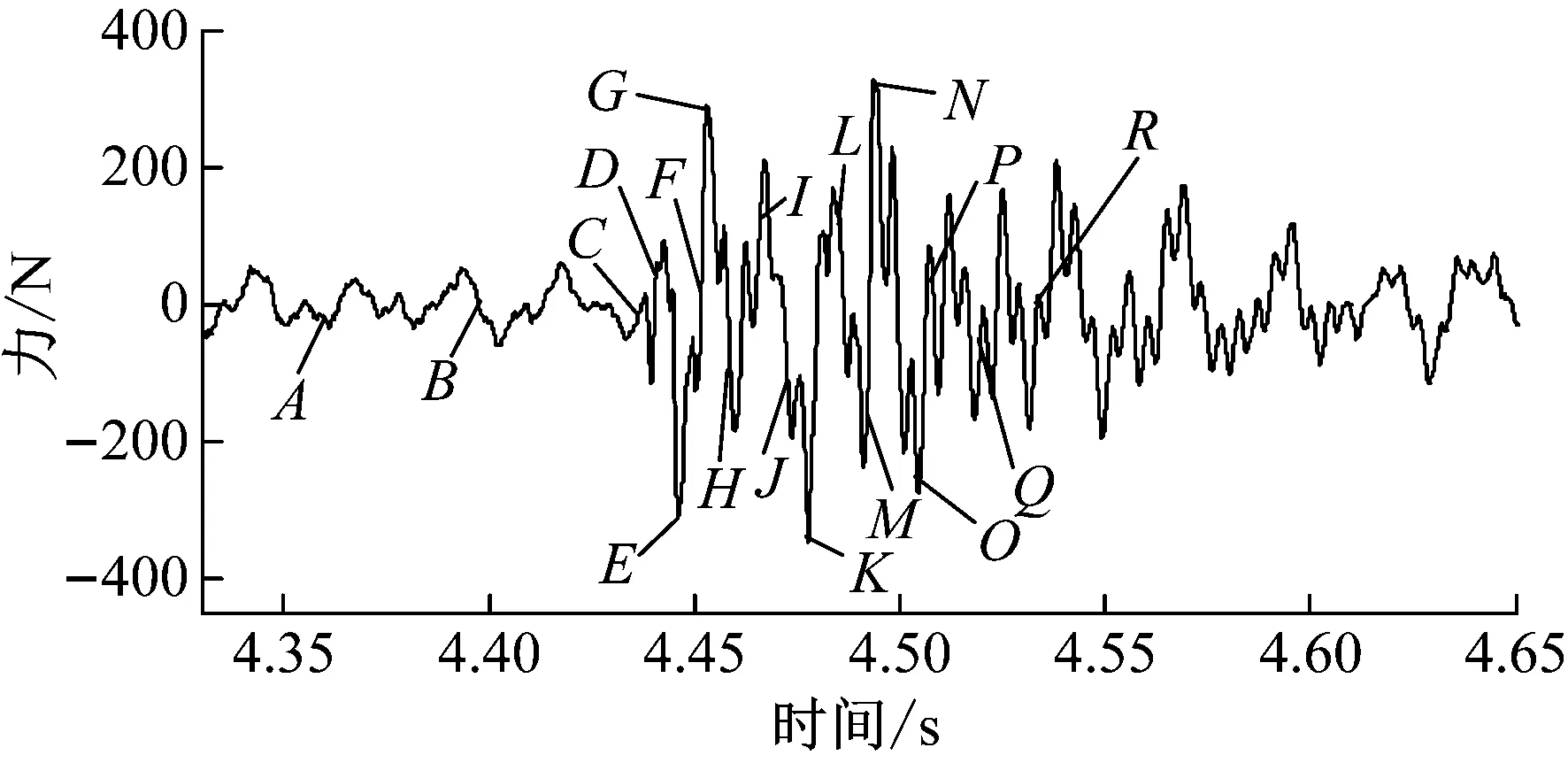
图8 高速摄像和螺旋桨模型推力的同步测试结果(工况2)Fig.8 Test results of high-speed video and model propeller thrust synchronization measurement (case 2)
从图8冰桨碰撞过程图片可以看出,工况2的模型冰与桨模发生多次的碰撞作用,从C时刻运动至桨盘与1号桨叶接触,模型冰在旋转桨叶带动下发生翻转和部分破坏,然后连续与2号、3号、4号桨叶以及再与1号桨叶发生碰撞切削作用。从C~O时刻,基本经过一个螺旋桨旋转周期后,模型冰大部分受旋转桨叶的冲撞作用向螺旋桨外半径方向弹开,再向螺旋桨下游运动,而模型冰仅有小部分被桨叶切碎,未能整体贯穿。
从图8桨模推力变化曲线上也可以看出,在冰桨碰撞作用过程中采集到的大幅推力脉动信号的持续时间要大于图7,且推力脉动的幅值和数量也都增大,例如出现G、K、N等时刻的多个峰值。由于工况2的模型冰块为80 mm×80 mm×40 mm的长方体,质量和惯性较工况1增大,且初始释放位置在左上方,具有更多的抽吸加速时间和更大的轴向运动速度,因此冰桨碰撞桨模的推力脉动幅值更大,连续的冰桨碰撞冲击作用明显。而在P时刻冰桨碰撞结束后,受到连续激励的长轴动力仪采集到的桨模推力波动也要大于工况1,衰减到稳定水动力采集状态所需的时间也要增加。
从以上两个冰桨碰撞案例可以看出,不同的模型冰尺寸、初始释放位置和螺旋桨的运行工况,会产生模型冰块受切削破碎经过桨盘和碰撞弹开至桨盘外的不同冰桨碰撞作用方式,且碰撞次数和碰撞程度均不相同,随机性和不确定性较强。此外,由于每组工况均进行了重复性试验,下面仍选取工况2对试验测试的重复性进行分析。图9给出了工况2部分重复性试验的螺旋桨推力时历曲线测试结果。

(a) 重复性试验1

(b) 重复性试验2图9 工况2螺旋桨推力的重复性试验结果Fig.9 Repeatability test results of propeller thrust in case 2
对比图9和图8的重复性试验螺旋桨推力时历曲线可以看出,相同工况螺旋桨与冰块的碰撞作用时长和碰撞峰值基本在同一量级,但出现的峰值数目和峰值大小存在差异。这主要是由于螺旋桨存在旋转运动,在每次试验中难以做到桨叶在相同相位位置时释放冰块。虽然相同工况的重复性试验使得冰块在到达桨叶时的径向位置基本相同,但冰块与桨叶开始接触的弦向位置不同,而螺旋桨又存在三维曲面形状,使得冰块与桨叶的碰撞作用方式不同,进而带来冰桨碰撞次数和碰撞峰值大小的差异。可见,自由运动冰块与螺旋桨碰撞的不同工况之间、相同工况的重复性试验之间均可能出现不同的冰桨碰撞作用方式,也证明了本文建立冰桨碰撞作用过程图像和螺旋桨水动力同步采集分析系统的必要性,否则难以对测试结果进行合理解释。
因此开展此类问题研究,非常有必要借助于冰桨碰撞作用过程的性能曲线和时空特征变化信息,从多个工况以及重复性试验中提取极限和平均结果,综合分析冰桨碰撞对螺旋桨水动力性能的影响变化规律。
4 结 论
(1) 将高速摄影和螺旋桨水动力同步测试技术应用于冰桨碰撞螺旋桨水动力性能模型试验中,通过多相机同步测试平台的搭建和触发采集环节的参数匹配调节,实现了冰桨碰撞过程中螺旋桨水动力随时空变化的实时监测。通过对比图像采集时长和触发信号曲线,验证了同步测试技术在冰桨碰撞模型试验应用中取得了良好效果。
(2) 冰桨碰撞存在单次、多次等不同的碰撞作用方式,随机性和不确定性强,对螺旋桨水动力性能的影响程度不同。同步测试可为冰桨碰撞提供时空多特征变化信息,为综合分析冰桨碰撞对螺旋桨性能影响提供可靠依据。
