基于离散元法的免耕深施肥分段式玉米播种开沟器研制
2021-09-16赵淑红刘汉朋侯磊涛袁溢文杨悦乾
赵淑红,刘汉朋,侯磊涛,张 鑫,袁溢文,杨悦乾
·农业装备工程与机械化·
基于离散元法的免耕深施肥分段式玉米播种开沟器研制
赵淑红,刘汉朋,侯磊涛,张 鑫,袁溢文,杨悦乾※
(东北农业大学工程学院,哈尔滨 150030)
针对东北垄作深施肥免耕播种机上开沟器播种深度均匀性差、工作阻力大、土壤扰动大的问题,该研究利用离散元软件(EDEM 2.7)仿真分析不同类型破茬刀-施肥铲装置对土壤的作用机理,设计了一种分段式玉米播种开沟器。首先建立土壤-玉米根系-玉米秸秆离散元仿真模型,然后进行不同类型破茬刀-施肥铲装置离散元仿真试验,以回落土壤最大合外力的位置和方向为依据设计开沟器入土部分曲线,同时结合滑切原理设计开沟器未入土部分斜刃,最后根据土壤回落距离确定施肥铲和开沟器间距为374 mm。田间对比试验结果表明,分段式开沟器比尖角式开沟器、滑刀式开沟器、双圆盘式开沟器的播深变异系数分别降低了14.24%、27.31%、33.63%;工作阻力分别降低了27.56%、16.93%、1.23%;土壤扰动面积分别降低了11.67%、28.34%、49.34%。分段式开沟器播种深度均匀性高、工作阻力小、土壤扰动小,具有较优的作业效果。
离散元法;农业机械;开沟器;免耕播种;播种深度均匀性;工作阻力;土壤扰动
0 引 言
在玉米免耕播种作业中,深施肥作业方式使根系直接接触肥料,能有效促进种子萌发[1],开沟器作为免耕播种机上的关键部件之一,其性能影响免耕播种开沟作业质量[2-3]。圆盘式开沟器因工作阻力小、通过性强,被广泛应用到免耕播种机上,但机具质量较大且深施肥条件下播深一致性差,不适合中小型免耕播种机[4]。因此,不断优化开沟器结构,使之更符合农艺要求,在降低工作阻力和土壤扰动的同时,提高深施肥条件下的播种深度均匀性,对农业生产十分重要。
离散元法可用来模拟颗粒材料和研究材料间的微观及宏观变化,被广泛地应用到开沟器的结构设计中[5-7]。学者通常以工作阻力和土壤扰动作为免耕播种开沟器性能的评价指标[8-10],对开沟器的研究取得大量成果[11-15]。苟文等[12]设计了一种圆弧刃口型开沟器,降低了开沟器工作阻力和土壤扰动,并具有较优的根茬切断能力和通过性。马云海等[13]采用仿生思想,设计了一种仿生波纹形开沟器,解决了传统开沟器易黏土、工作阻力大的问题。Saeys等[8]采用试验的方法探究了开沟器滑切和砍切2种切割方式,得出采用滑切方式切割时开沟器作业阻力较小的结论。赵淑红等[14]结合滑推工作原理设计了一种滑推式开沟器,提高了深施肥条件下播种开沟器的回土能力和播深一致性。张祥彩[15]针对中小型免耕播种机,设计一种滑动式开沟器,创造了良好的种床环境,提升了开沟器减阻、防堵和耐磨性能。但针对提高深施肥条件下免耕播种机开沟器播种深度均匀性的研究还鲜有报道,且在破茬-深施肥-开沟过程土壤运动规律对播种深度均匀性的影响并不明确。
本研究在土壤-玉米根系-玉米秸秆离散元仿真模型的基础上,对不同类型破茬刀-施肥铲装置进行离散元仿真试验,通过分析深施肥回落土壤运动规律设计开沟器入土部分曲线,通过滑切原理分析设计开沟器未入土部分斜刃,以提高开沟器的播种深度均匀性、降低开沟器的工作阻力和土壤扰动。同时通过开沟器离散元仿真验证试验验证设计思路的合理性。并进行田间试验,对比分析其作业效果。
1 土壤-玉米根系-玉米秸秆离散元仿真模型建立
1.1 土壤模型
为保证工作部件的作业范围,本研究设置长1 500 mm、宽400 mm、高150 mm的土壤仿真模型区域,设置土壤颗粒模型为单一颗粒的球体[16],设置土壤颗粒半径为8 mm,选用EDEM软件中Hertz-Mindlin with Bonding接触模型作为土壤颗粒之间的黏结模型,根据文献[16-17],土壤模型其他参数如表1所示,土壤颗粒生成时间为0~6 s,沉降时间1 s。
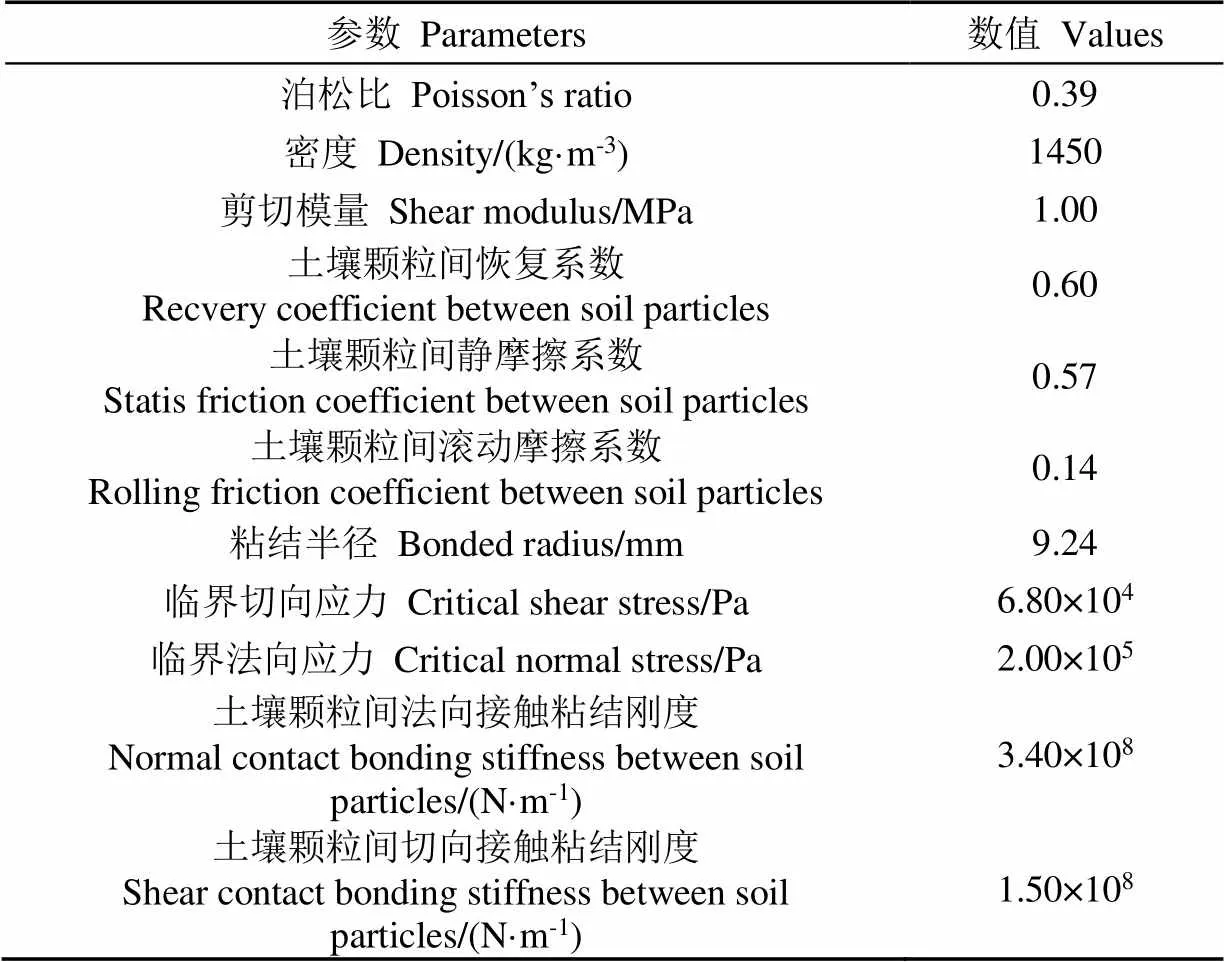
表1 土壤模型参数
1.2 玉米根系模型
为充分模拟根系的破碎与变形,采用离散元颗粒粘结成根系模型[18],根据文献[19]确定根系各部分平均尺寸,设置根系间距为30 mm,根系总数为4个,根系幅宽为200 mm;地下部分高度为120 mm;地上部分高度为80 mm,其中气生根高度为30 mm;半径为4 mm;茎秆高度为50 mm;半径为15 mm。设置根系颗粒半径为1.5 mm,选用EDEM软件中Hertz-Mindlin with Bonding接触模型作为根系之间的粘结模型,选用EDEM软件中JKR接触模型作为土壤-根系之间的黏结模型,设置根系与土壤表面能为10 J/m2,根据文献[16-18]确定根系模型参数,如表2所示,设置根系生成时间为7~8 s。

表2 根系模型参数
1.3 玉米秸秆模型
目前秸秆模型在离散元仿真时普遍被假设为刚性体,但该秸秆模型无法模拟秸秆破碎状态,因此,本研究采用EDEM中内置Hertz-Mindlin with Bonding接触模型,通过颗粒粘结的方式建立秸秆模型[20]。设置秸秆颗粒半径为1.5 mm,根据文献[16,20-21]设置秸秆模型参数如表3所示,秸秆还田后长度为50~100 mm,本研究设置秸秆长度分别为50、75和100 mm,茎秆半径为10~15 mm,根据玉米生长发育特点,玉米秸秆直径从根部到顶部呈逐渐减小的变化,一般最大直径为30 mm,本研究设置秸秆半径分别为10、12.5和15 mm,随机组合成9种类型秸秆,设置秸秆模型为圆柱形。

表3 秸秆模型参数
根据玉米秸秆还田后秸秆覆盖量[16],共设置秸秆108根,每种类型秸秆12根,随机平铺于地表上,秸秆生成总时间为8~9 s,土壤-玉米根系-玉米秸秆整体仿真模型如图1所示。
2 破茬刀-施肥铲装置离散元仿真试验
2.1 土壤颗粒运动轨迹分析
根据免耕播种农艺要求,免耕播种过程包括破茬、深施肥、开种沟、排种、覆土和镇压。为充分研究破茬-深施肥过程中的土壤运动轨迹,本研究选取直面式、缺口式、波纹式3种类型圆盘破茬刀,尖角式、弧状式2种类型施肥铲组合成6种破茬刀-施肥铲装置,分别为直面破茬刀-尖角铲装置、缺口破茬刀-尖角铲装置、波纹破茬刀-尖角铲装置、直面破茬刀-弧形铲装置、缺口破茬刀-弧形铲装置、波纹破茬刀-弧形铲装置。参考农业机械手册,建立破茬刀-施肥铲装置仿真几何模型,分别将6种几何模型保存为stp格式导入到土壤-玉米根系-玉米秸秆离散元仿真模型中,破茬刀-施肥铲装置的材料为65 Mn钢,参考文献[16,18],设置钢密度为7 865 kg/m3、泊松比为0.3、剪切模量为7.97×1011Pa,其他接触参数如表4所示,设置破茬刀入土深度为80 mm,前进速度为4 km/h,旋转速度为5 rad/s,施肥铲入土深度为100 mm,仿真试验过程如图2所示。
以直面破茬刀-尖角铲装置为例,在破茬刀正前方竖直方向等距选取工作深度范围内任意6个土壤颗粒,如图3a所示,对颗粒轨迹进行逐一输出,输出后的土壤颗粒运动轨迹。由图3可知,随着破茬刀-施肥铲装置的前进,破茬刀首先接触土壤颗粒,在破茬刀作用下土壤颗粒被下压,产生沿前进方向斜向下的运动轨迹,如图3b所示,破茬刀经过后,该土壤颗粒在施肥铲的作用下被抬起,产生沿前进方向斜向上的运动轨迹,如图3c所示,在施肥铲的拖动下,该土壤颗粒随施肥铲前进,由于受到周围土壤的阻力,该土壤颗粒运动速度逐渐减小,当施肥铲刚通过土壤颗粒时,该土壤颗粒不再受施肥铲作用,受周围土壤颗粒的挤压开始回落,如图3d所示。随着施肥铲前进,土壤颗粒逐渐回落,直至稳定。在破茬刀-施肥铲装置的作用下,完整的土壤颗粒运动轨迹为下压-抬起-开始回落-回落-回落稳定,如图3e所示。

表4 离散元模型部分接触参数
2.2 土壤颗粒运动规律分析
提取所选土壤颗粒从开始回落到回落稳定过程中任一时刻所受合外力的大小(间隔0.01 s),土壤颗粒编号依次为22427、19357、17339、15417、13020和11019,输出最大合外力时刻下土壤颗粒的位置坐标和所受合外力的大小及方向,将每种破茬刀-施肥铲装置回落土壤所受最大合外力的位置和方向剔除不良数据后利用CAD中样条曲线功能进行曲线拟合,以土壤模型几何中心为坐标原点,各破茬刀-施肥铲装置各土壤颗粒最大合外力拟合曲线如图4所示。
3 开沟器结构设计
3.1 入土部分曲线设计
将破茬刀-施肥铲装置作业后土壤颗粒回落过程最大合外力位置和方向的拟合曲线设计为开沟器入土部分曲线,能有效避免开沟器对回落土壤的碰撞,能有效保证土壤的有序回落,避免种肥同层,能提高开沟器播种深度均匀性、降低开沟器工作阻力。
按照东北地区垄作玉米免耕播种开沟农艺要求,玉米种沟深度为30~50 mm,免耕播种开沟器入土深度通常大于玉米种沟深度,本研究拟设置开沟器入土深度为60 mm。根据不同类型破茬刀-施肥铲装置影响土壤运动轨迹的情况可知,不同类型破茬刀对土壤运动轨迹影响较小,不同类型施肥铲对土壤运动轨迹影响较大,同时为了充分体现不同类型破茬刀-施肥铲装置影响土壤运动规律的差异性,将同一类型施肥铲和不同类型施肥铲作业后能代表土壤回落过程最大合外力的位置和方向曲线进行拟合,因此将图4a~4c中3条土壤颗粒拟合曲线在深度方向(纵坐标)截取60 mm后在OriginPro9.1中拟合成一条开沟器入土部分曲线Ⅰ,如图5a所示,将图4d~4f中3条土壤颗粒拟合曲线在深度方向(纵坐标)截取60 mm后在OriginPro9.1中拟合成一条开沟器入土部分曲线Ⅱ,如图5b所示,将图4a~4f中6条土壤颗粒拟合曲线在深度方向(纵坐标)截取60 mm后在OriginPro9.1拟合成一条开沟器入土部分曲线Ⅲ,如图5c所示。
3.2 未入土部分斜刃设计
秸秆堵塞是免耕播种存在的主要问题,玉米秸秆还田后全覆盖于地表,厚度可达120 mm,在开沟器工作过程中,地表播种带覆盖秸秆会大量挂集于开沟器前端,造成堵塞、破坏沟型[4],因此开沟器应具有良好的防堵性能。玉米秸秆还田后秸秆不同的铺放方式会影响开沟器的堵塞形式[22],当秸秆顺向(沿开沟器前进方向)铺放时,随着开沟器移动,秸秆会沿开沟器两侧向后分流,不易造成堵塞,当秸秆横向(垂直开沟器前进方向)铺放时,随着开沟器移动,秸秆会被挂集到开沟器前端,且随机组前进挂集秸秆会越来越多,直至达到堵塞状态[15]。因此开沟器作业过程造成堵塞的主要原因为横向铺放秸秆。
取任一横向铺放秸秆为研究对象,置于笛卡尔坐标系的平面内,秸秆与开沟器斜刃相接触,开沟器沿轴正向平行移动,假定斜刃对秸秆的切割过程为“原地切割”,即秸秆的位置固定不动,斜刃沿方向发生偏移,沿方向切割秸秆[23],对斜刃切割秸秆受力分析和位移分析,分别如图6所示。
根据图6中秸秆受力分析可得秸秆的质点动力学微分方程为
式中为秸秆的质量,kg;为秸秆与开沟器斜刃滑动摩擦角,(°)。
根据图6中秸秆位移分析可得:
式中为开沟器作业速度,m/s;为开沟器斜刃对秸秆的切割作用时间,s。
根据图6中秸秆受力和位移分析可得到开沟器斜刃切割单个秸秆的功耗1为[23-24]
开沟器匀速前进,则e0,秸秆相对于开沟器斜刃加速移动主要发生在方向,则
假设秸秆均匀排列,则开沟器斜刃每次切割秸秆的总数量可表示为
式中为开沟器斜刃的高度,mm。
联立求解式(1)~(5),开沟器斜刃切割秸秆的总功耗2为
由式(6)可知,开沟器斜刃切割秸秆的总功耗2和斜刃高度、开沟器作业速度、秸秆质量、秸秆直径、秸秆的摩擦角、滑切角有关,开沟器作业速度设定为4 km/h,开沟器斜刃高度设定为140 mm,根据文献[22],秸秆与钢的滑动摩擦角为27°,代入式(6)计算得到最小切割功耗下滑切角为32.24°,为便于加工取整数32°。
3.3 其他参数设计
开沟器入土隙角过小,则入土性能变差,入土隙角过大,则使土壤提前回落,本文入土隙角选取为6°[12];当开沟器横向宽度小于铲柄横向宽度时,能降低土壤扰动,本文开沟器横向宽度选取为20 mm[10];铲柄采用30 mm× 50 mm的钢管[11],兼具输种管的作用,长度为500 mm。
3.4 施肥铲-分段式开沟器安装距离的确定
为了最大限度内降低土壤扰动,需保证回落土壤在最大合外力的时刻恰好沿开沟曲线切线方向运动,这就要保证回落土壤在回落到最大合外力的时刻恰好落在开沟曲线上,因此施肥铲-分段式开沟器安装距离为定值可有效降低土壤扰动[16],由于分段式开沟器匀速前进,以6种破茬刀-施肥铲装置22427号土壤颗粒为例,根据回落土壤从开始回落至最大合外力的时间1,即可求出开沟曲线顶点距施肥铲的距离1,公式如式(7)所示,计算结果如表5所示。
式中1为开沟曲线顶点距施肥铲的距离,mm,1为回落土壤从开始回落至最大合外力的时间,s。

表5 开沟曲线顶点距施肥铲距离
该距离基于土壤-玉米根系-玉米秸秆离散元模型,结合土壤回落最大合外力的时间计算求得,是考虑根系颗粒和秸秆颗粒影响下的最优土壤回落距离,能够保证回落土壤颗粒恰好落在开沟曲线上,并沿曲线切线方向运动,避免了开沟器对回落土壤的碰撞,能有效降低土壤扰动。由于波纹破茬刀-尖角铲装置22427号土壤颗粒仿真过程中溅出,因此分段式开沟器Ⅰ入土部分曲线顶点距施肥铲中心距离取直面破茬刀-尖角铲装置22427号颗粒和缺口破茬刀-尖角铲装置22427号颗粒最大合外力时刻距施肥铲距离的平均值约为284 mm,结合开沟器结构尺寸,综合计算得出分段式开沟器Ⅰ铲柄中心距施肥铲距离为396 mm,同理可求出分段式开沟器Ⅱ铲柄中心距施肥铲距离为360 mm,分段式开沟器Ⅲ铲柄中心距施肥铲距离为374 mm。
3.5 离散元仿真验证试验
为验证设计思路的合理性,将3种开沟器与破茬刀、施肥铲进行装配。以直面破茬刀、尖角施肥铲为例,组成破茬-深施肥-开沟几何模型,进行离散元仿真试验。开沟器入土深度为60 mm,前进速度为4 km/h,选取与2.1节相同的22427、19357、17339、15417土壤颗粒编号进行最大合外力方向对比,分析方法与2.2节相同,将输出土壤颗粒在与方向的合外力进行矢量合成得到土壤颗粒每一时刻所受到的合外力,通过筛选比较得到土壤颗粒所受到的最大合外力,以最大合外力作用点为原点得出土壤颗粒所受最大合外力的方向,结果如表6所示。

表6 不同装置类型的最大合外力方向
根据离散元仿真试验结果可得,3种破茬-深施肥-开沟装置与直面破茬刀-尖角施肥铲装置所选土壤颗粒最大合外力的方向均在同一象限,且角度相差不大,验证了设计思路的合理性。3种分段式开沟器的结构仅在入土部分曲线有差别,且3种入土部分曲线(Ⅰ、Ⅱ、Ⅲ)趋势基本一致。为使分段式开沟器具有更广泛的适用性,能适用多种类型破茬刀-施肥铲装置作业,能适用多种免耕播种机机型,因此选择由入土部分曲线Ⅲ构成的分段式开沟器Ⅲ(6种类型破茬刀-施肥铲装置作业后的土壤颗粒回落过程最大合外力位置和方向的拟合曲线)作为本文最终设计的开沟器,对其进行加工,开沟器材料采用65Mn钢,对未入土斜刃部位进行了淬火处理以提高其强度,开沟器实物图如图7所示。
4 田间试验
对上述所设计的开沟器,取播深变异系数、工作阻力、土壤扰动面积为评价指标,对分段式开沟器、尖角式开沟器、滑刀式开沟器、双圆盘式开沟器进行田间作业性能对比试验,分析其性能。
4.1 试验条件
田间对比试验于2020年10月在黑龙江省东北农业大学保护性耕作试验基地展开。试验区土壤容重(0~150 mm土层)1.62 g/cm3,土壤硬度(0~150 mm)1 623 kPa,平均留茬高度110 mm,秸秆覆盖量1 000 g/m2,土壤含水率(0~150 mm)(20±1)%,秸秆含水率20.8%。
试验所用设备有奔野-454拖拉机(宁波)、约翰迪尔-354拖拉机(宁波)、2BM-2深施肥免耕播种机、分段式开沟器、尖角式开沟器、滑刀式开沟器、双圆盘式开沟器、SC-900型土壤硬度仪、GPS-10A机动车多功能检测装置等。
4.2 试验方案
试验选取2BM-2深施肥免耕播种机进行免耕播种作业,破茬-深施肥过程配套与仿真过程相同的直面破茬刀、尖角施肥铲,设置4种类型开沟器前进速度分别为2、4和6 km/h,开沟深度均为60 mm。设置每组试验的行程为50 m,每组试验重复5次。机器设备连接及试验参数测量如图8所示。
工作阻力的测量:利用奔野-454拖拉机牵引约翰迪尔-354拖拉机和2BM-2深施肥免耕播种机进行工作阻力测量,首先输出空载(不配装开沟器)的工作阻力;再分别输出作业时(配装各类型开沟器)的工作阻力;最后利用差值法计算出每种类型开沟器的工作阻力[25]。
土壤扰动面积的测量:以开沟器作业后扰动至种沟两侧的土壤横截面积来表示土壤扰动面积的大小,将水平尺的中心气泡处固定于沟型轮廓仪上,在坐标纸上勾勒出种沟形状,根据坐标纸种沟形状计算出土壤扰动面积[26]。土壤沟型轮廓图如图9所示。
播深变异系数计算方法:开沟器作业后,将种子上方的回流土壤扒出,测量其深度,不同类型开沟器每组试验取25个点[26],播深变异系数的计算公式为
4.3 试验结果与分析
4种类型开沟器作业效果如图10所示,记录并计算试验数据,4种类型开沟器的播深变异系数、土壤扰动面积在不同作业速度下的对比,如图11所示,工作阻力试验结果如表7所示。
由图11可知,分段式开沟器、尖角式开沟器、滑刀式开沟器、双圆盘式开沟器的平均播深变异系数分别为6.81%、7.78%、8.67%、9.10%;平均土壤扰动面积分别为1 362、1 521、1 748、2 034 mm2;由表7可知,分段式开沟器、尖角式开沟器、滑刀式开沟器、双圆盘式开沟器的平均工作阻力分别为61.60、78.58、72.03、62.36 N。分段式开沟器比尖角式开沟器、滑刀式开沟器、双圆盘式开沟器的播深变异系数分别降低了14.24%、27.31%、33.63%;工作阻力分别降低了27.56%、16.93%、1.23%;土壤扰动面积分别降低了11.67%、28.34%、49.34%。
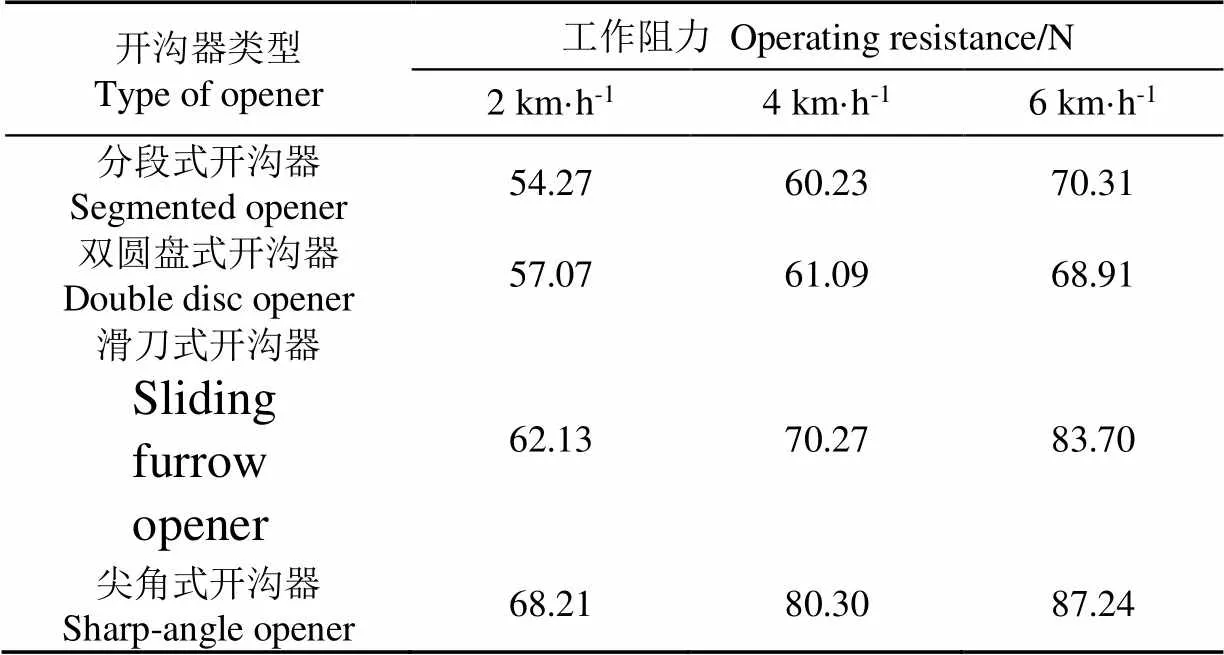
表7 开沟器工作阻力试验结果
以上4种类型开沟器开出的种沟都较为平整,工作性能相对稳定,且作业时均未发生缠草、堵塞相关问题,均可适用于免耕播种下的开种沟作业。在4种开沟器作业效果的比较中,分段式开沟器设计土壤回落最大合外力的位置和方向曲线为开沟曲线,根据回落土壤规律确定了安装距离,所以其播种深度均匀性好、工作阻力小、土壤扰动小。尖角式开沟器属于锐角开沟器,结构简单、横向宽度小、回土性好,其工作阻力最大、土壤扰动较小,播种深度均匀性较好,但播种深度过深。滑刀式开沟器播深变异系数较大,工作时向下压切土壤,对种沟侧壁形成一定的挤压作用,工作阻力较大,回土量比尖角式开沟器小,土壤扰动较大。双圆盘式开沟器播深变异系数最大,其滚动作业,工作阻力较小,且与分段式开沟器工作阻力差别不大,但其回土量小,对土壤产生的扰动最大。结合各种开沟器指标的平均值可知,分段式开沟器可提高深施肥条件下播种深度均匀性、减小工作阻力、降低土壤扰动、满足免耕播种作业要求。
5 结 论
本文运用离散元数值仿真分析破茬-深施肥-开沟过程,以提高播种深度均匀性、减阻降扰为目标,通过提取土壤运动规律设计分段式开沟器。
通过建立的土壤-玉米根系-玉米秸秆离散元仿真模型,对不同类型破茬刀-施肥铲装置进行离散元仿真试验。以回落土壤最大合外力的位置和方向为依据设计分段式开沟器入土部分曲线;运用滑切原理设计分段式开沟器未入土部分斜刃。
田间试验结果表明,分段式开沟器比尖角式开沟器、滑刀式开沟器、双圆盘式开沟器的播深变异系数分别降低了14.24%、27.31%、33.63%;工作阻力分别降低了27.56%、16.93%、1.23%;土壤扰动面积分别降低了11.67%、28.34%、49.34%。研究对开沟器的设计及其理论研究具有参考意义。
[1] 包红静,安景文,解占军,等. 一次深施肥对玉米供肥规律的影响[J]. 安徽农业科学,2008,36(31):10-12.
Bao Hongjing, An Jingwen, Xie Zhanjun, et al. Effect of once deep fertilization on the law of fertilizer supply of corn[J]. Journal of Anhui Agriculture Science, 2008, 36(31): 10-12. (in Chinese with English abstract)
[2] 贾洪雷,姜鑫铭,郭明卓,等. 2BH-3型玉米行间播种机设计与试验[J]. 农业机械学报,2015,46(3):83-89.
Jia Honglei, Jiang Xinming, Guo Mingzhuo, et al. Design and experiment of anti-blocking mechanism for inter-row no-tillage seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 83-89. (in Chinese with English abstract)
[3] 林静,刘安东,李宝筏,等. 2BG-2型玉米垄作免耕播种机[J]. 农业机械学报,2011,42(6):43-46.
Lin Jing, Liu Andong, Li Baofa, et al. 2BG-2 type cron ridge planting no-till planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 43-46. (in Chinese with English abstract)
[4] 高焕文,李洪文,姚宗路. 轻型高防堵性能免耕播种机研究[J]. 中国工程科学,2007,9(9):35-39.
Gao Huanwen, Li Hongwen, Yao Zonglu. Study on the light no-till seeders with high anti-blockage performance[J]. Strategic Study of CAE, 2007, 9(9): 35-39. (in Chinese with English abstract)
[5] 于建群,钱立彬,于文静,等. 开沟器工作阻力的离散元法仿真分析[J]. 农业机械学报,2009,40(6):53-57.
Yu Jianqun, Qian Libin, Yu Wenjing, et al. DEM analysis of the resistances applied on furrow openers[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(6): 53-57. (in Chinese with English abstract)
[6] 潘世强. 基于离散元法的芯铧式开沟器优化设计与试验研究[D]. 长春:吉林大学,2015.
Pan Shiqiang. Research on the Optimization Design and the Experiment of the Core Ploughshare Furrow Opener Based on the Discrete Element Method[D]. Changchun:Jinlin University, 2015. (in Chinese with English abstract)
[7] Shmulevich I, Asaf Z, Rubinstein D. Interaction between soil and a wide cutting blade using the discrete element method[J]. Soil & Tillage Research, 2007, 97(1): 37-50.
[8] Saeys W, Wallays C, et al. An automatic depth control system for shallow slurry injection, Part 2: Control design and field validation[J]. Biosystems Engineering, 2008, 99(2): 161-170.
[9] Aili H, Ying C. Soil disturbance and draftforce of selected seed openers[J]. Soil & Tillage Research, 2014, 140: 48-4.
[10] 赵淑红,刘宏俊,谭贺文,等. 仿旗鱼头部曲线型开沟器设计与性能试验[J]. 农业工程学报,2017,33(5):32-39.
Zhao Shuhong, Liu Hongjun, Tan Hewen, et al. Design and performance experiment of opener based on bionic sailfish head curve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 35(5): 32-39. (in Chinese with English abstract)
[11] 赵淑红,杨悦乾,闫以勋,等. 鸭嘴式开沟器的设计试验[J]. 东北农业大学学报,2013,44(11):113-117.
Zhao Shuhong, Yang Yueqian, Yan Yixun, et al. Design of duck mouth type opener[J]. Journal of Northeast Agricultural University, 2013, 44(11): 113-117. (in Chinese with English abstract)
[12] 苟文,马荣朝,杨文钰,等. 小麦免耕播种机开沟器的设计[J]. 农业工程学报,2012,28(增刊1):21-25.
Gou Wen, Ma Rongchao, Yang Wenyu, et al. Design of opener on no-till wheat seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 21-25. (in Chinese with English abstract)
[13] 马云海,马圣胜,贾洪雷,等. 仿生波纹形开沟器减黏降阻性能测试与分析[J]. 农业工程学报,2014,30(5):36-41.
Ma Yunhai, Ma Shengsheng, Jia Honglei, et al. Measurement and analysis on reducing adhesion and resistance of bionic ripple opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 36-41. (in Chinese with English abstract)
[14] 赵淑红,刘宏俊,张先民,等. 滑推式开沟器设计与作业性能优化试验[J]. 农业工程学报,2016,32(19):26-34.
Zhao Shuhong, Liu Hongjun, Zhang Xianmin, et al. Design and optimization experiment of working performance of sliding push opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 26-34. (in Chinese with English abstract)
[15] 张祥彩. 免耕播种机偏转侧滑式防堵开沟器研究[D]. 北京:中国农业大学,2016.
Zhang Xiangcai. Study on Slide-slip Anti-blocking Furrow Opener for No-till Planterd[D]. Beijing: China Agricultural University, 2016. (in Chinese with English abstract)
[16] 赵淑红,刘汉朋,杨超,等. 玉米秸秆还田交互式分层深松铲设计与离散元仿真[J]. 农业机械学报,2021,52(3):75-87.
Zhao Shuhong, Liu Hanpeng, Yang Chao, et al. Design and discrete element simulation of interative layered subsoiler with maize straw returned to filed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(3): 75-87. (in Chinese with English abstract)
[17] 张永良. 基于离散元的逆转旋耕施肥播种机抛土性能仿真及试验研究[D]. 镇江:江苏大学,2012.
Zhang Yongliang. Simulation and Experimental Study Throwing Soil Performance of Reversal Cultivated Land and Fertilization Seeder Based on DEM[D]. Zhenjiang: Jiangsu University, 2012. (in Chinese with English abstract)
[18] 刘俊安. 基于离散元方法的深松铲参数优化及松土综合效应研究[D]. 北京:中国农业大学,2018.
Liu Junan. Study on Subsoiler Parameters Optimization and Comprehensive Effect of Subsoiling Based on the Discrete Element Method[D]. Beijing: China Agricultural University, 2018. (in chinese with English abstract)
[19] 孙剑. 玉米根茬结构和力学特征及与土壤的摩擦学性能[D]. 长春:吉林大学,2011.
Sun Jian. Structural and Mechanical Characteristics of Corn Stubble and Its Tribological Properties against Soil[D]. Changchun: Jilin University, 2011. (in chinese with English abstract)
[20] 张锋伟,宋学锋,张雪坤,等. 玉米秸秆柔丝破碎过程力学特性仿真与试验[J]. 农业工程学报,2019,35(9):58-65.
Zhang Fengwei, Song Xuefeng, Zhang Xuekun, et al. Simulation and experiment on mechanical characteristics of kneading and crushing process of corn straw[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(9): 58-65. (in Chinese with English abstract)
[21] 张涛,刘飞,赵满全,等. 玉米秸秆接触物理参数测定与离散元仿真标定[J]. 中国农业大学学报,2018,23(4):120-127.
Zhang Tao, Liu Fei, Zhao Manquan, et al. Determination of corn stalk contact parameters and calibration of discrete element method simulation[J]. Journal of China Agricultural University, 2018, 23(4): 120-127. (in Chinese with English abstract)
[22] 卢彩云. 免耕播种机滑板压秆旋切式防堵技术与装置研究[D]. 北京:中国农业大学,2014.
Lu Chaiyun. Study on Anti-blocking Technology and Device of Rotary Cutting with Slide Plate Pressing Straw for No-till Planter[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[23] 权龙哲. 玉米根茬收获模式及采收机理[D]. 长春:吉林大学,2012.
Quan Longzhe. Corn Stubble Harvest Mode and Mechanisms[D]. Changchun:Jilin University, 2012. (in Chinese with English abstract)
[24] 郑侃,何进,李洪文,等. 基于离散元深松土壤模型的折线破土刃深松铲研究[J]. 农业机械学报,2016,47(9):62-72.
Zheng Kan, He Jin, Li Hongwen, et al. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 62-72. (in Chinese with English abstract)
[25] 王加一. 免耕条件下破茬深松装置设计与试验[D]. 哈尔滨,东北农业大学,2019.
Wang Jiayi. Design and Experiment of Subsoiler-stubble Chopper Device in No-tillage[D]. Harbin: Northeast Agricultural University, 2019. (in Chinese with English abstract)
[26] 赵淑红,谭贺文,王加一,等. 多功能集成式播种开沟器的设计与试验[J]. 农业工程学报,2018,34(11):58-67.
Zhao Shuhong, Tan Hewen, Wang Jiayi, et al. Design and experiment of multifunctional integrated seeding opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 58-67. (in Chinese with English abstract)
Development of deep fertilizing no-tillage segmented maize sowing opener using discrete element method
Zhao Shuhong, Liu Hanpeng, Hou Leitao, Zhang Xin, Yuan Yiwen, Yang Yueqian※
(School of Engineering, Northeast Agricultural University, Harbin 150030, China)
Openers in no-tillage can confer a yield benefit via disruption of pathogenic hyphae, particularly when crop rotations lack species diversity in extremely cold climates, like in northeast China. However, it is still urgent to improve the uniformity of seedling depth, while alleviating large working resistance and soil disturbance on the deep fertilizing no-tillage planter after returning crop stalks to the field. In this study, a novel opener was designed for corn seeds in a segmented flow for deep fertilizing and no-tillage using a Discrete Element Method (DEM). Six types of stubble cutter-fertilization shovel devices were selected on the soil to explore the effect mechanism in the simulated analysis. First of all, a soil-corn stubble-corn straw DEM model was established to achieve the uniform seed-to-soil contact. Three kinds of stubble cutters (including plane, notched and corrugated stubble cutter) were then randomly combined with two kinds of fertilization shovels (including sharp and arc-type fertilization shovel) in the DEM simulation test. After that, a respective analysis was carried out for the motion trail of soil particles in the six types of stubble cutter–fertilization shovel devices after the operation. The location and direction of soil particles were finally extracted to obtain six fitted curves representing the maximum force in the falling process. As such, the curve of the opener was designed in the buried part. Specifically, the opener curve Ⅰ was set as the fitted falling curve of soil particles after the combination operation of three kinds of stubble cutters and sharp-cornered fertilization shovel devices. The opener curve Ⅱ was that of three kinds of stubble cutters and arc-type fertilization shovel devices. The opener curve III was that of six kinds of stubble cutters and fertilization shovel devices. At the same time, the inclined edge of the opener in the unburied part was also designed to improve the passing ability, particularly for the sliding frictional angle under the minimum power consumption when cutting straw. In addition, the buried clearance angle of the opener was set as 6° with the traverse width of 20 mm and inclined edge angle of 30°. Finally, the optimal spacing between the fertilization shovel and the opener was determined as 374 mm, according to the time and advanced speed for the soil particle falling back to the maximum force. Besides, a field test was performed on three kinds of segmented openers to verify the feasibility of the developed device. Curve III was finally chosen in the buried part for more extensive applicability of the segmented opener. The field comparison test indicated that the variable coefficient of seedling depth in the segmented opener dropped 14.24%, 27.31%, and 33.63%, respectively, while the working resistance dropped 27.56%, 16.93%, and 1.23%, respectively, as well as 11.67%, 28.34%, and 49.34% in the soil disturbance area, compared with the sharp-cornered, the sliding knife and double disk opener. Consequently, a high operation performance was achieved in the segmented opener, including high uniformity of seedling depth, small working resistance, and soil disturbance for deep fertilizing and no-tillage.
discrete element method; agricultural machinery; opener; no-till sowing; sowing depth uniformity; working resistance; soil disturbance
2020-12-20
2021-04-28
国家重点研发计划(2020YFD1000903);黑龙江省应用技术研究与开发计划项目(GA19B101)
赵淑红,博士,教授,博士生导师,研究方向为田间农业机械及力学特性。Email:shhzh091@sina.com
杨悦乾,研究员级工程师,研究方向为保护性农业装备。Email:yangyueqian@126.com
10.11975/j.issn.1002-6819.2021.13.001
S220.39; S223.2
A
1002-6819(2021)-13-0001-10
