一种可重构的空间开/闭链6R移动并联机构的设计与分析
2021-09-13张春燕蒋新星朱锦翊卢晨晖
陈 致,张春燕,蒋新星,朱锦翊,卢晨晖
(上海工程技术大学机械与汽车工程学院,上海201620)
近年来,并联机构作为机器人领域的重要分支,已广泛应用于工业、农业和医疗等领域[1-4]。并联机构具有独特的闭环特性,常被用作移动机器人的移动机构[5],可大大提高机器人的刚度和承载能力。例如:陈昊等[6]研制了一款以并联机构为腿部机构的步行机器人,其足端具有6个自由度,可在复杂地面环境下工作;何研颖等[7]以平面六杆机构为本体,设计了一种两轮移动机器人,其结构紧凑,质量较小,具有高机动性,可实现轮式移动;Kong[8]设计了一种六杆单环机构,其利用分岔点的切换来实现在地面上的循环平移。
相较于传统的移动并联机构,可重构移动并联机构不仅具有承载能力强、刚度大和动态特性好等优点,还具有可重构特性。面对多种工作环境,可重构移动并联机构可通过改变自身的构型来完成不同的任务,其受到了学者们的广泛关注[9-12]。例如:Liu 等[13]利用平面四杆机构与六杆机构,设计了一种可重构移动并联机构,其具有滚动和步行两种模式;刘超等[14]结合地面移动需求,利用机构分岔点来实现模式切换,设计了一种具有类蠕动、平面4R(转动副)转向和内翻模式的地面移动机构;姚舜等[15-16]将2 个经典的Schatz 机构组合设计成一种可实现单动力转向爬行的移动机器人,分析了其移动机理并通过试验样机验证了其转向控制方法的可行性。上述研究表明,可重构移动并联机构可通过构型切换来适应不同的地形。
为提高移动并联机构的地形适应能力,以平面开/闭链6R机构为基本单元,设计了一种可重构的空间开/闭链6R移动并联机构。基于单环6R机构的打开与闭合,所设计的机构可实现折叠、足式越障和滚动等多种运动模式的相互转换。首先,基于螺旋理论对所设计的机构在不同运动模式下的自由度进行分析;然后,建立所设计机构的运动学模型,对其足式越障性能和滚动模式的可行性进行分析;最后,利用ADAMS(auto‐matic dynamic analysis of mechanical systems,机械系统动力学自动分析)软件对所设计机构的运动模式进行仿真分析和验证。
1 新型可重构移动并联机构的结构设计与运动模式分析
1.1 结构设计
图1所示为可重构的空间开/闭链6R移动并联机构的三维模型,其由4条相同的支链和上、下平台组成。其中,呈对称分布的每条支链均由2个转动副和1个万向副(U)组成,与上平台连接的万向副可等效为轴线相交的2个转动副。按顺时针方向对支链编号,分别为支链1,2,3,4。由支链1,3(2,4)与上、下平台形成的2个平面开/闭链6R机构在空间上正交;上、下平台均为“十”字形板,其中上平台为固定的“十”字上板,下平台由4块下板组成。
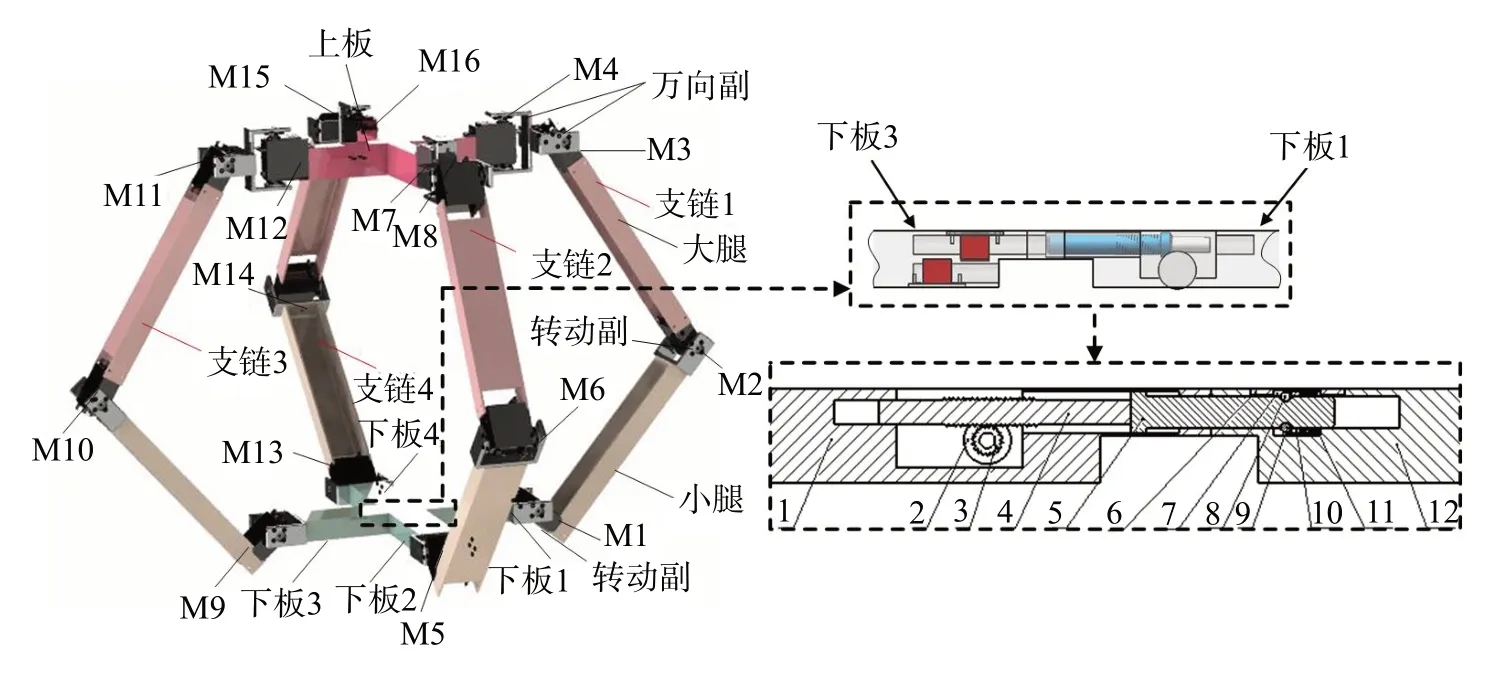
图1 可重构的空间开/闭链6R移动并联机构的三维模型Fig.1 Three dimensional model of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
对于由2 条对称的URR 支链和上、下平台组成的平面开/闭链6R 机构,基于下平台的结构特点,该机构可实现打开与闭合。在该平面开/闭链6R 机构中,开合电机固定在下板3的卡槽内;由自锁壳体、压紧滚珠1、压紧滚珠2、压环和弹簧组成的自锁装置安装在下板1的卡槽内。在平面开/闭链6R机构由打开到闭合的过程中,先启动驱动电机M9,使得下板3与上平台平行,然后启动驱动电机M1,使得下板1与下板3的接口对准,最后开合电机通电,带动蜗轮转动,进而带动蜗杆运动,在蜗杆的推动下自锁推杆进入自锁装置,从而使开链闭合。同理,当闭链打开时,开合电机断电后自锁推杆向后移动,依次启动驱动电机M1 和M9,使得下板1,3 依次打开后折叠进入小腿内,从而使闭链变成开链。
图2所示为可重构的空间开/闭链6R移动并联机构的结构简图。以支链1为例,其小腿与下平台的连接点为转动副A1、腿与大腿的连接点为转动副B1,大腿与上平台的连接点为万向副。其中,转动副A1、B1与万向副等效的第一转动副C1的轴线平行,与万向副等效的第二转动副D1的轴线垂直。整个可重构移动并联机构共有16 个驱动电机,支链1 中A1、B1、C1和D1处分别装有驱动电机M1、M2、M3和M4。

图2 可重构的空间开/闭链6R 移动并联机构的结构简图Fig.2 Structure diagram of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
1.2 运动模式分析
由于平面开/闭链6R机构既具有闭链6R机构的多边形几何变形特性[17],又具有开链6R机构的支链末端散点着陆功能。因此,基于开/闭链6R机构的打开与闭合,可实现所设计可重构移动并联机构的多种运动模式,如表1所示。在初始位型下,可重构的空间开/闭链6R 移动并联机构是一个结构对称的并联机构,由于其单条支链中的2个转动副与万向副等效的第一转动副相互平行,则整个机构可等效成具有虚约束的Sarrus机构[18],其可实现沿上、下平台方向的折叠,即折叠模式。依次启动相应的驱动电机,使2个闭链6R机构打开,该移动并联机构可从初始位型切换到双向四足越障模式;继续驱动万向副等效的第二转动副,使2 个正交的开链6R 机构重构为平行状态,则可切换为单向四足越障模式。在单向四足越障模式下,依次启动相应的驱动电机,使2个开链6R机构关闭,则该移动并联机构可切换到滚动模式,此时万向副等效的2个转动副的轴线相互垂直,通过转动第二转动副来使2 个平行的闭链6R 机构正交,可切换回折叠模式。
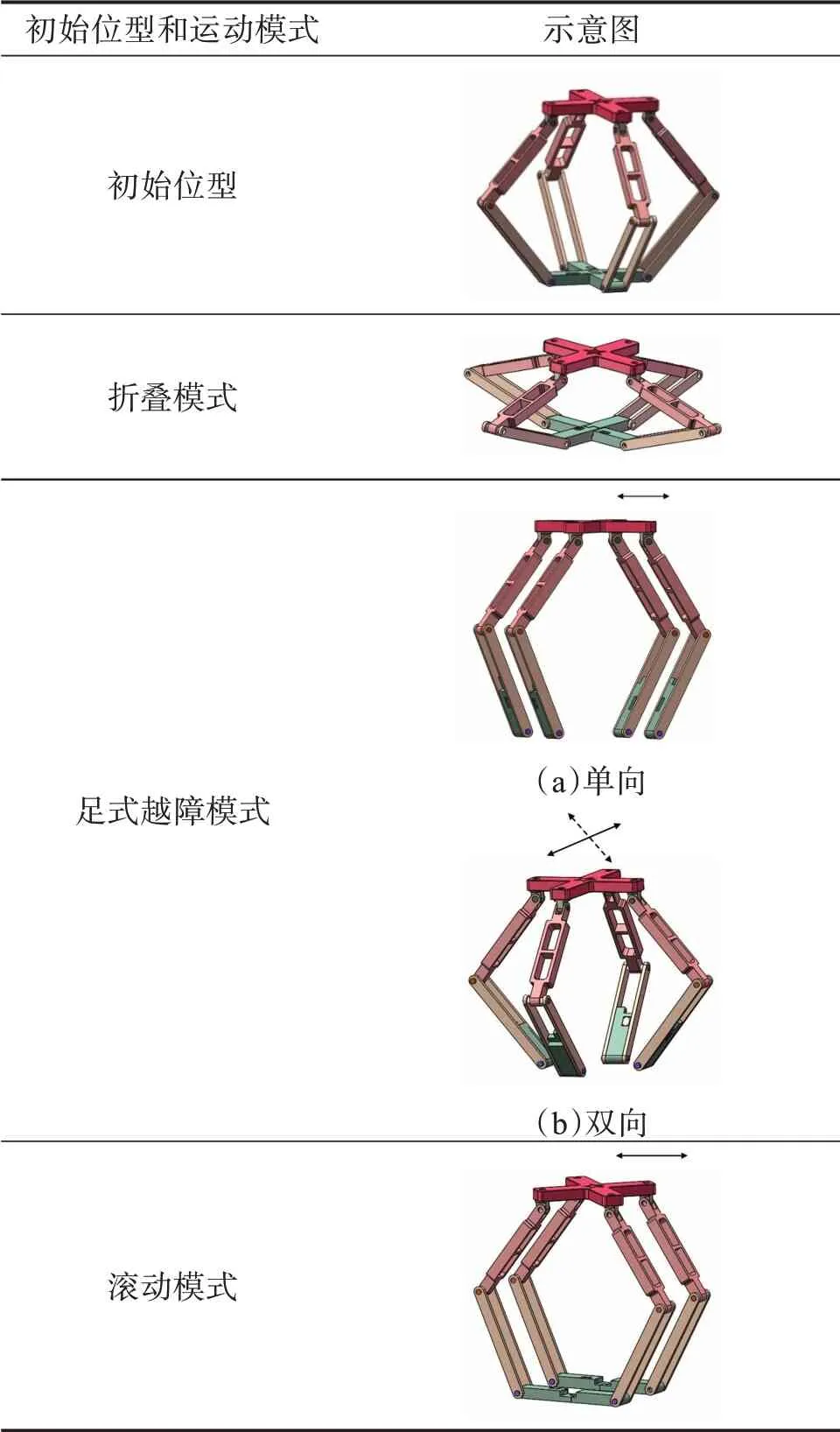
表1 可重构的空间开/闭链6R移动并联机构的初始位型和运动模式Table 1 Initial configuration and motion modes of recon‐figurable spatial open/closed chain 6R mobile par‐allel mechanism
要实现可重构的空间开/闭链6R 移动并联机构的各个运动模式,须使该机构在各运动模式下具有不同的自由度。基于螺旋理论,对各运动模式下机构的自由度及运动性质进行分析。先建立不同运动模式下机构的坐标系,其中坐标系原点均位于转动副A1的中心处,转动副A1的轴线方向为x方向,竖直向上方向为z方向。不同运动模式下可重构的空间开/闭链6R移动并联机构的运动螺旋及自由度如表2所示(鉴于机构的结构对称,只给出单条支链的螺旋示意)。表中:a12、a13、a14、b12和b13分别为各转动副有向螺旋线段的方向数;d12、d13、e12和e13分别为有向螺旋线段相对原点的距离沿x、y方向的分量。

表2 不同运动模式下可重构的空间开/闭链6R移动并联机构的运动螺旋及自由度Table 2 Kinematic helix and degree of freedom of reconfigurable spatial open/closed chain 6R mobile parallel mechanism under different motion modes
由表2可知,对于可重构的空间开/闭链6R移动并联机构,当处于折叠模式时,其每条支链有2个约束螺旋,机构过约束,其上平台只有1个沿z方向的移动自由度;当处于足式越障模式时,机构处于开链状态,不存在约束,其共有6个自由度,即沿x、y、z方向的平移自由度和绕x、y、z方向的转动自由度;当处于滚动模式时,其每条支链有3个约束螺旋,则整个机构有3个公共约束,可等效为三自由度(沿y、z方向的平移自由度和绕x方向的转动自由度)的平面6R连杆机构。
2 新型可重构移动并联机构的运动性能分析
对复杂地形的适应能力是可重构移动并联机构的重要性能指标之一。对复杂地形的适应能力主要包括跨越障碍的能力、跨越沟渠的能力以及爬坡能力等。为适应移动过程中的地形变化,应保证可重构的空间开/闭链6R移动并联机构在足式越障、滚动等运动模式下的性能。
2.1 足式越障模式分析
2.1.1 D-H坐标系构建
在足式越障模式下,可重构的空间开/闭链6R移动并联机构的4块下板收至小腿内,其可等效为连杆机构。构建该机构单支链的D-H 坐标系,分别以转动副D1、C1、B1(将转动副视作关节)为原点建立坐标系:o1-x1y1z1、o2-x2y2z2、o3-x3y3z3,其中o1-x1y1z1是基坐标系,如图3所示。该支链的D-H 参数如表3 所示。其中:θi为关节转动角度(θ1为万向副等效的第二转动副的轴线与竖直方向的夹角;θ2为大腿与万向副等效的第一转动副的轴线之间的夹角;θ3为大腿与小腿之间的夹角);di为相邻关节的y向距离;li为连杆长度(l1为万向副长度;l2为大腿长度;l3为小腿长度);αi为相邻关节轴线之间的角度。
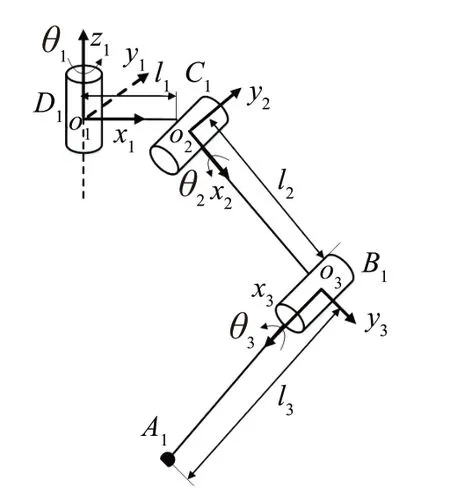
图3 足式越障模式下可重构的空间开/闭链6R 移动并联机构单支链的D-H坐标系Fig.3 D-H coordinate system of single branch chain of recon‐figurable spatial open/closed chain 6R mobile parallel mechanism under foot-type obstacle crossing mode
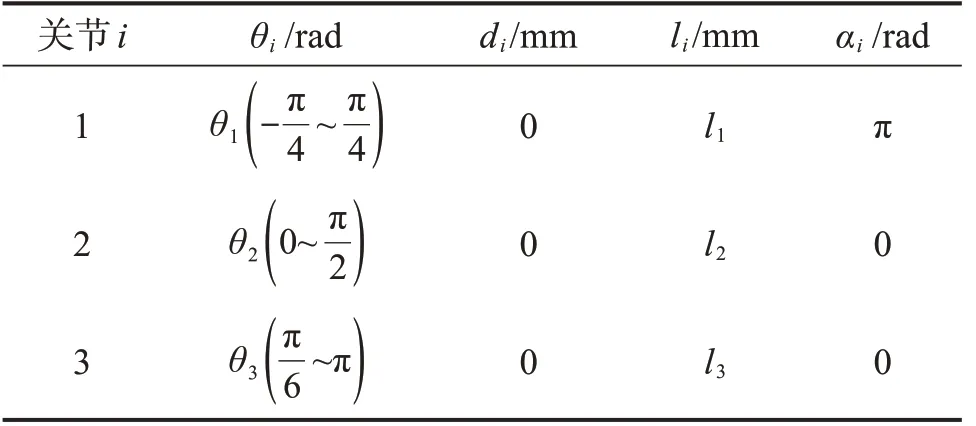
表3 足式越障模式下可重构的空间开/闭链6R移动并联机构单支链的D-H参数Table 3 D-H parameters of single branch chain of reconfigu‐rable spatial open/closed chain 6R mobile parallel mechanism under foot-type obstacle crossing mode
2.1.2 足式越障模式运动学分析
根据表3 的D-H 参数和相邻2 个坐标系间的变换矩阵,得到足式越障模式下可重构的空间开/闭链6R移动并联机构单支链的正运动学方程及其足端的期望位姿。其中,相邻2个坐标系间的变换矩阵为:
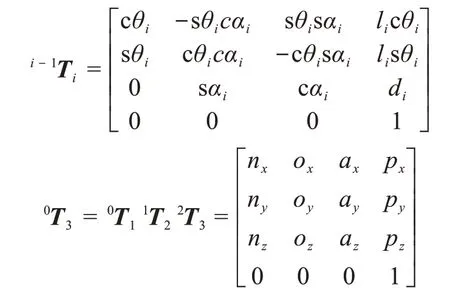
式中:c=cos,s=sin;上标0表示以上平台中心为原点构建的坐标系o0-x0y0z0。
由此可得,足式越障模式下该机构支链足端的位置为:

当万向副长度为20 mm、大腿长度为250 mm、小腿长度为250 mm时,利用MATLAB软件绘制可重构的空间开/闭链6R 移动并联机构支链足端的工作空间,如图4所示。其中:图4(a)、(b)分别为支链足端工作空间(即足端可达位置的集合)在x1o1y1、y1o1z1平面上的投影。从图4中可以看出,该机构在足式越障模式下的最大跨度(x1方向)约为450 mm,最大步长(y1方向)约为400 mm,最大抬腿高度(z1方向)约为480 mm。
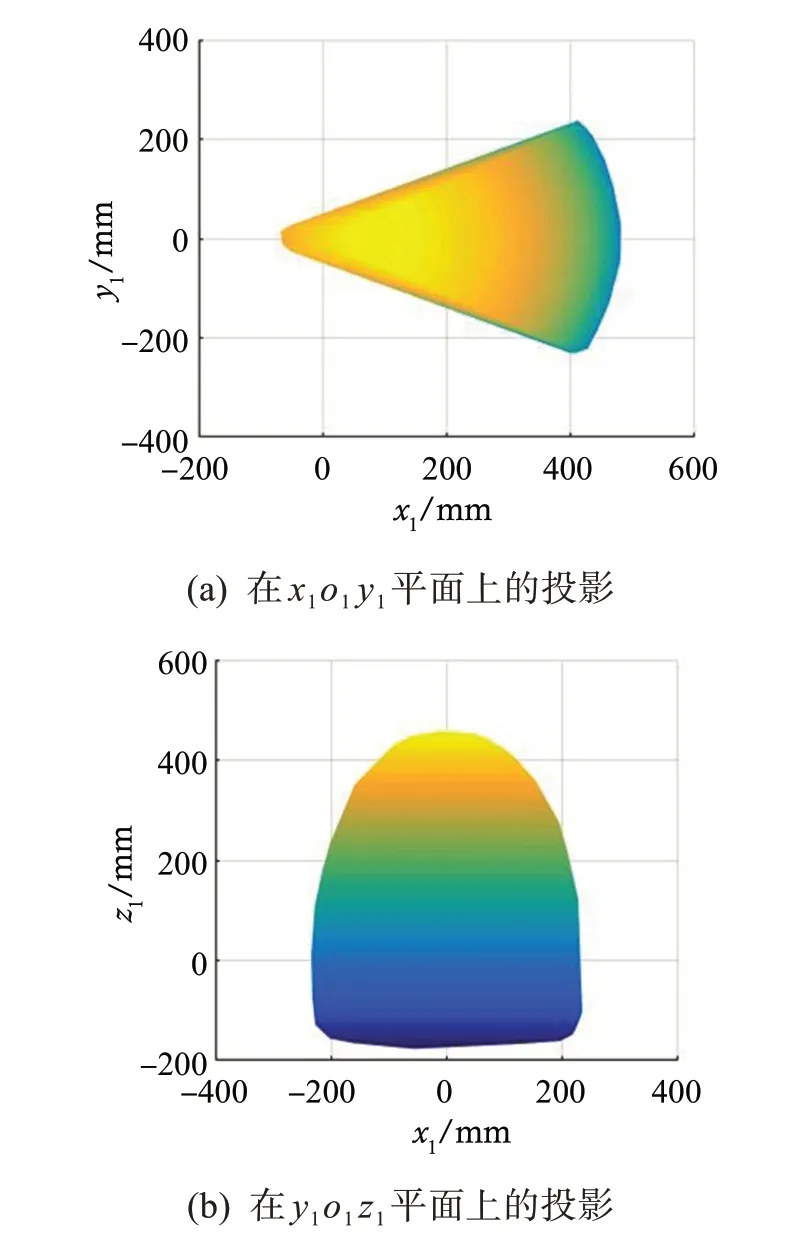
图4 可重构的空间开/闭链6R 移动并联机构支链足端的工作空间Fig.4 Workspace of branch chain end of reconfigurable spa‐tial open/closed chain 6R mobile parallel mechanism
2.1.3 足端越障分析
在越障过程中,可重构的空间开/闭链6R移动并联机构的运动主要包括每条支链的俯仰运动和摆动运动,以越过一定宽度和高度的障碍物。
如图5所示,可重构的空间开/闭链6R移动并联机构的某支链在平面内由A点(起始点)摆动到B点(落点)。设万向副至A点的距离为L1,L1在摆动平面内的投影长度为L3;万向副至摆动平面的竖直距离为L2;万向副至B点的距离在摆动平面内的投影长度为L4;万向副在摆动平面内投影点至B点的距离沿y、x方向的分量为L5、L6。
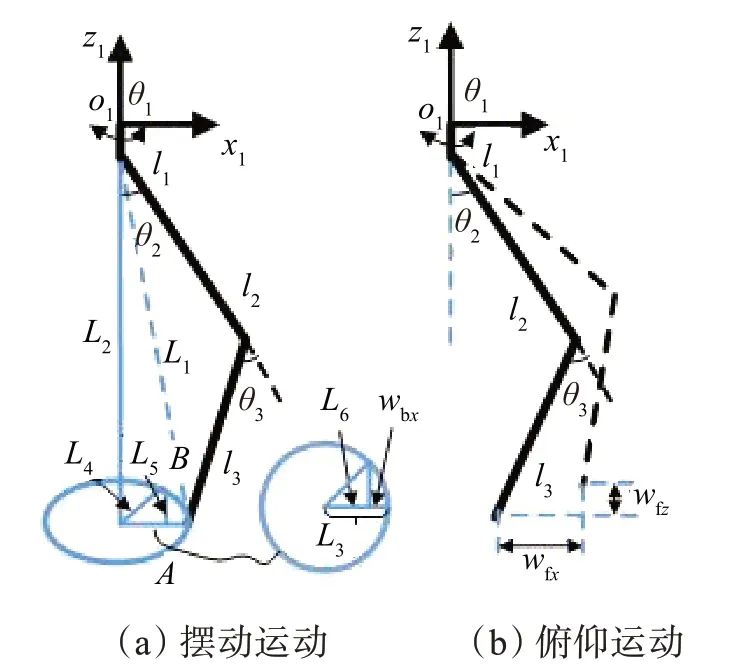
图5 可重构的空间开/闭链6R 移动并联机构单支链的运动简图Fig.5 Kinematic diagram of single branch chain of re‐configurable spatial open/closed chain 6R mo‐bile parallel mechanism
由图5可得:
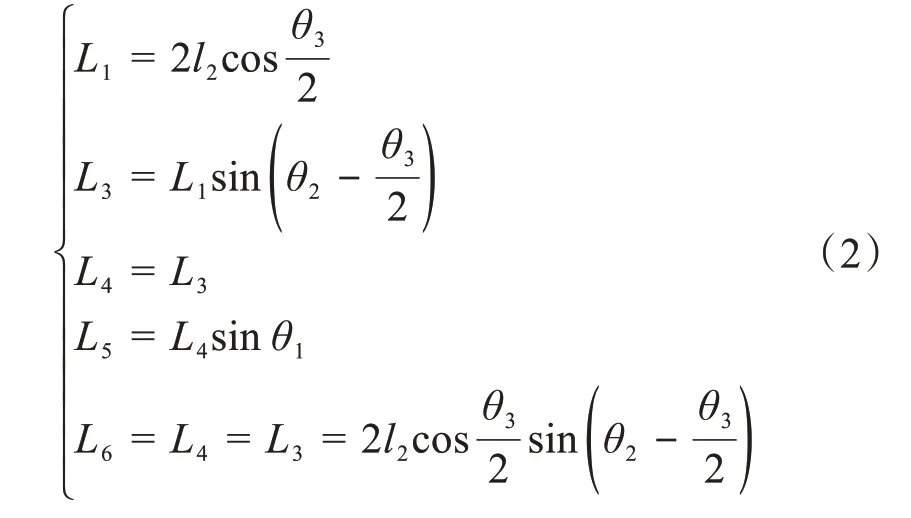
当支链作摆动运动时,其足端的x向位移wbx为:

当支链作俯仰运动时,其足端的x向位移wfx为:

由图5 可知,支链作摆动运动时,其z向位移不变,仅在作俯仰运动时产生z向位移。在支链作俯仰运动的过程中,其足端的z向位移wfz为:

如图6所示,当可重构的空间开/闭链6R移动并联机构处于单向足式越障模式时,其一次所能越过的障碍宽度wx和障碍高度wz分别为俯仰运动时产生的x向和z向位移,即:


图6 可重构的空间开/闭链6R 移动并联机构单向越障运动学分析Fig.6 Kinematic analysis of one-way obstacle crossing of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
如图7所示,当可重构的空间开/闭链6R移动并联机构处于双向越障模式时,其一次所能越过的障碍宽度wx为摆动运动产生的x向位移wbx与俯仰运动产生的x向位移wfx之和,越过的障碍高度wz为俯仰运动产生的z向位移wfz,即:

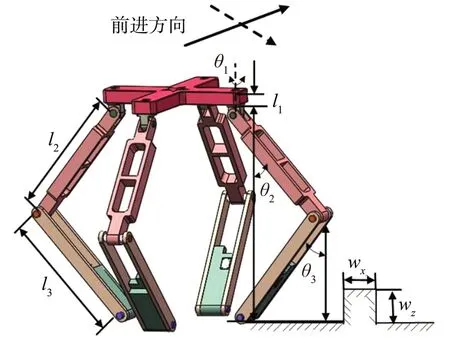
图7 可重构的空间开/闭链6R 移动并联机构双向越障运动学分析Fig.7 Kinematic analysis of bidirectional obstacle crossing of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
在足式越障模式下,可重构的空间开/闭链6R移动并联机构一次所能越过的障碍宽度wx和与θ2、θ3之间的关系如图8所示,一次所能越过的障碍高度wz与θ2、θ3之间的关系如图9所示。
由图8 可知,两曲面相交处表示单向和双向足式越障模式下可重构的空间开/闭链6R 移动并联机构一次所能越过的障碍宽度相同;在交线左侧,表示单向足式越障模式下机构所能越过的障碍宽度较大;在交线右侧,表示双向足式越障模式下机构所能越过的障碍宽度较大。由图9 可知,无论是单向还是双向足式越障模式,该机构一次所能越过的障碍高度相同,均为0~180 mm。
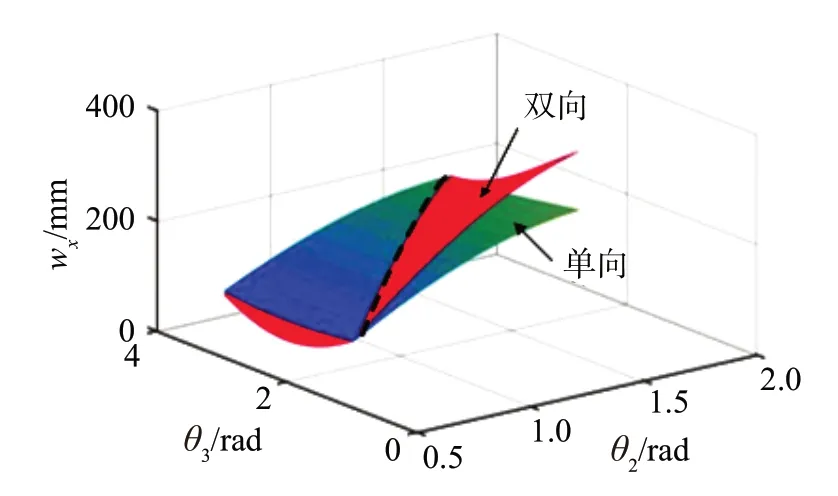
图8 越障宽度wx与θ2、θ3的关系Fig.8 Relationship between obstacle crossing width wx and θ2,θ3
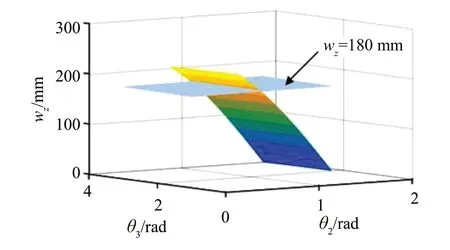
图9 越障高度wz与θ2、θ3的关系Fig.9 Relationship between obstacle crossing height wz and θ2,θ3
2.2 滚动模式分析
2.2.1 运动学分析
由上文分析可知,当可重构的空间开/闭链6R移动并联机构处于滚动模式时,整个机构可等效为平面6R连杆机构。如图10所示,以转动副A1中心为原点构建直角坐标系o-xyz,其中x方向为转动副A1的轴线方向,z方向为竖直向上方向。图中:γ1、γ2、γ3为驱动杆5,3,1 与相邻杆6,4,2 之间的角度;ϕ1、ϕ2、ϕ3为非驱动杆4,2,6与相邻杆5,3,1之间的角度;各杆长度均为a;η1、η2、η3为△A1B2C1的内角;Gj(j=1,2,…,6)为各杆件的质心。
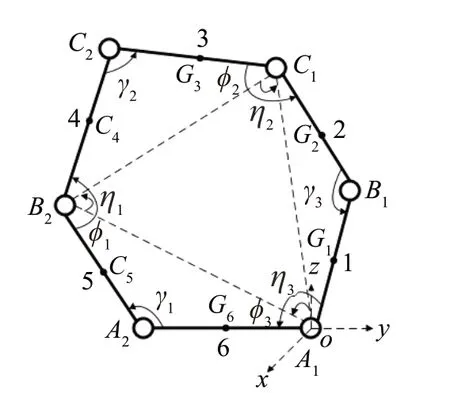
图10 可重构的空间开/闭链6R移动并联机构滚动模式简图Fig.10 Rolling mode diagram of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
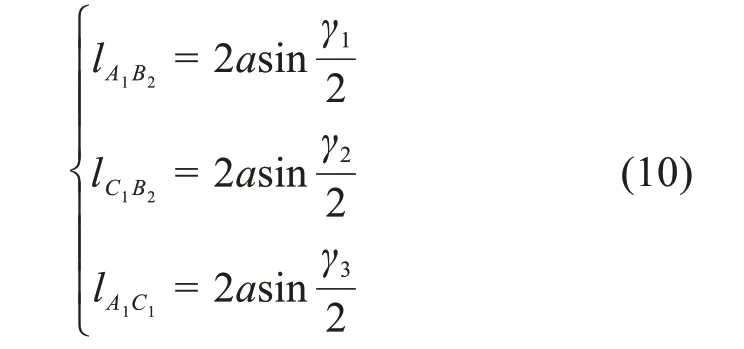
由图10可知,滚动模式下可重构的空间开/闭链6R移动并联机构共有3个自由度,可任意选择3个转动副作为驱动副。为使构型对称,此处选转动副A2、C2、B1作为驱动副。根据图10可得,△A1B2C1的边长为:
△A1B2C1的内角为:

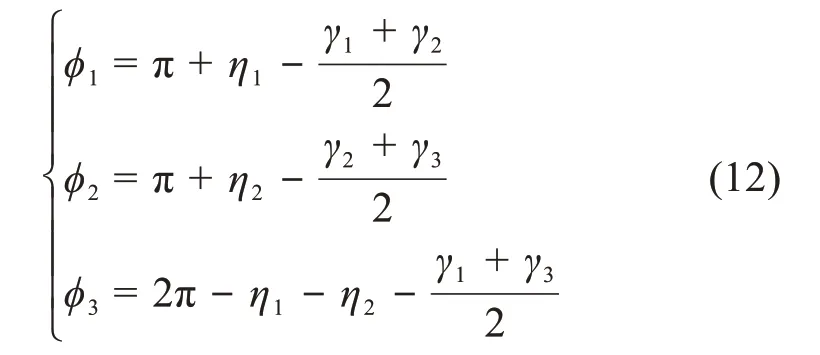
根据图10的几何关系,求得非驱动杆与相邻杆间的角度:
2.2.2 可行性分析
质心是用于判断机构运动稳定性的重要指标。当可重构的空间开/闭链6R 移动并联机构处于滚动模式时,须持续调整姿态。考虑各杆件的质量,机构的质心坐标可表示为:
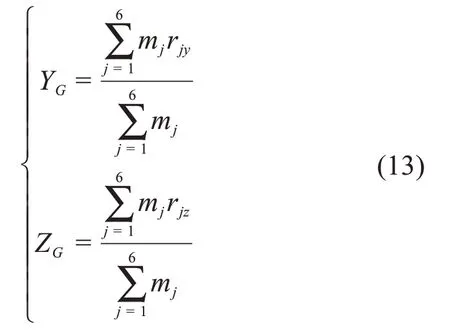
式中:mj为第j个杆件的质量;rjy、rjz为杆件j的几何中心的y、z坐标。
当驱动角度发生变化时,可重构的空间开/闭链6R移动并联机构的质心会发生变化。如图10所示,忽略连杆的厚度,假设机构中所有杆件的质量相同且均匀分布,均为m;各杆件的质心位于其几何中心处。非驱动杆6 与地面接触,其几何中心OG的坐标为将机构各杆件的质心坐标代入式(13),得到机构质心坐标与输入角γ1、γ2的关系。图11和图12所示分别为机构质心的z坐标与输入角γ1、γ2的关系及对应的等高线;图13和图14所示分别为机构质心的y坐标与输入角γ1、γ2的关系及对应的等高线。由图11 和图12 可知,机构质心的z坐标始终大于0 mm,满足滚动运动的条件。因此本文主要对机构质心的y坐标进行分析。

图11 机构质心的z坐标ZG与输入角γ1、γ2的关系Fig.11 Relationship between z coordinate ZG of mechanism mass center and input angle γ1,γ2

图12 机构质心的z 坐标ZG 与输入角γ1、γ2 关系的等高线示意图Fig.12 Contours diagram of relationship between z coordinate ZG of mechanism mass center and input angle γ1,γ2
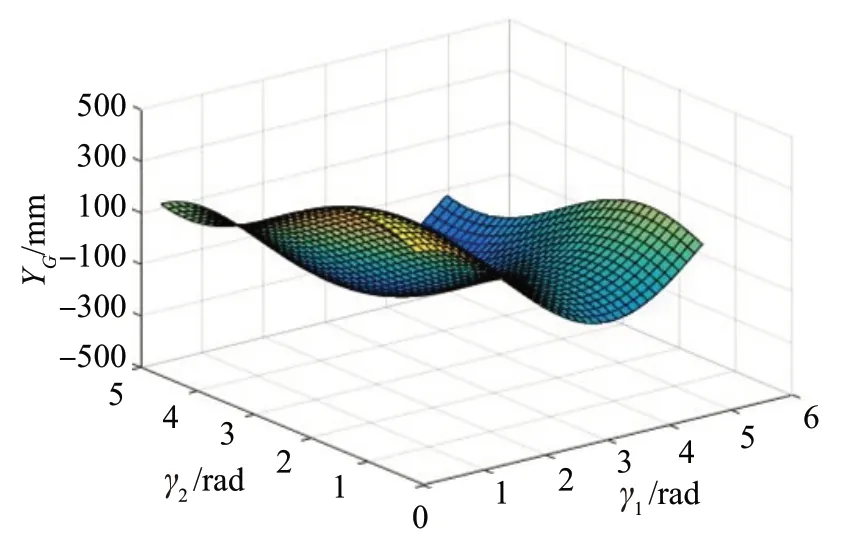
图13 机构质心的y坐标YG与输入角γ1、γ2的关系Fig.13 Relationship between y coordinate YG of mecha‐nism mass center and input angle γ1,γ2

图14 机构质心的y 坐标YG 与输入角γ1、γ2 关系的等高线示意图Fig.14 Contours diagram of relationship between y coordinate YG of mechanism mass center and input angle γ1,γ2
由图13和图14可知,当机构质心的y坐标小于0 mm时,不满足机构滚动时的稳定性条件,即机构处于失稳状态;当机构质心的y坐标大于0 mm时,满足机构滚动时的稳定性条件,即机构处于稳定状态。综上可知,当0 rad<γ1<2 rad、0 rad<γ2<3.5 rad时,YG>0mm,即机构处于稳定状态;当2 rad<γ1<5 rad、3.5 rad<γ2<5 rad时,YG<0 mm,即机构处于失稳状态。
3 仿真试验验证
利用ADAMS 软件对可重构的空间开/闭链6R移动并联机构的运动模式进行仿真分析,以验证各运动模式的可行性。设l2=l3=250 mm,并给定θ1、θ2和θ3的值。
3.1 折叠模式仿真分析
设置驱动电机为M2,其速度ω=π rad/s,对折叠模式下的可重构的空间开/闭链6R移动并联机构进行仿真分析,得到其上平台的位移变化曲线,如图15所示。由图可知,该机构初始位置为状态a,驱动1 s后,机构到达状态b,机构展开至杆件BkCk(k=1,2,…,4)与杆件Bk Ak(k=1,2,…,4)趋向平行;驱动至t=1.7 s时机构到达状态c,至此完成了1个周期的折叠。
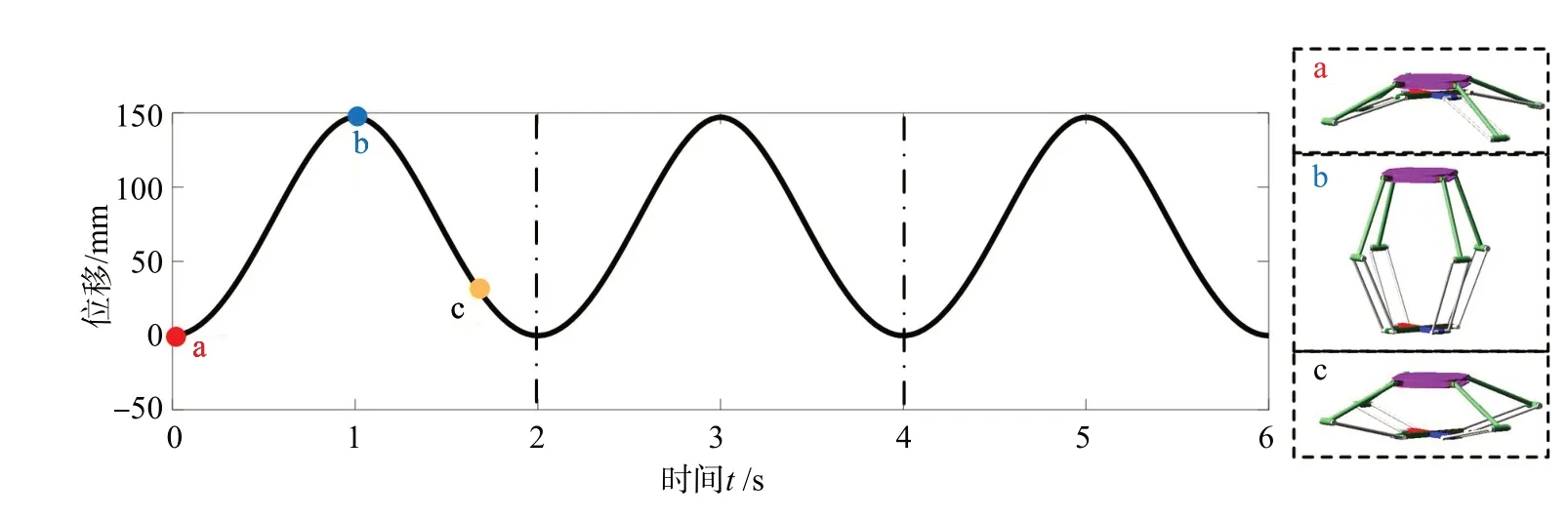
图15 可重构的空间开/闭链6R移动并联机构折叠模式仿真分析结果Fig.15 Simulation analysis results of folding mode of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
3.2 足式越障模式仿真分析
联合除M1、M5、M9和M13外的驱动电机,对足式越障模式下的可重构的空间开/闭链6R 移动并联机构进行仿真分析,得到其上平台的位移变化曲线,如图16所示。由图可知,当机构在状态a时为足式越障模式的初始状态;运动0.5 s后,机构到达状态b,此时,机构向前迈步;运动0.8 s后,机构继续运动至状态c,至此完成了1个周期的足式越障运动。

图16 可重构的空间开/闭链6R移动并联机构足式越障模式仿真分析结果Fig.16 Simulation analysis results of foot-type obstacle crossing mode of reconfigurable spatial open/closed chain 6R mobile par‐allel mechanism
3.3 滚动模式仿真分析
联合驱动电机M1、M3和M14,得到滚动模式下可重构的空间开/闭链6R 移动并联机构上平台的位移变化曲线,如图17所示。当机构处于状态a时,为滚动模式的初始状态;运动0.5 s时,机构到达状态b,此时机构处于运动状态,杆件AkBk(k=1,2,…,4)与杆件CkBk(k=1,2,…,4)的角度发生变化,机构质心向y轴正向移动;机构继续运动至杆件AkBk(k=1,2,…,4)着地,即到达状态c;运动至5 s时,上平台运动至接地位置;运动至10 s时,机构到达状态f,至此完成了1个周期的滚动。

图17 可重构的空间开/闭链6R移动并联机构滚动模式仿真分析结果Fig.17 Simulation analysis results of rolling mode of reconfigurable spatial open/closed chain 6R mobile parallel mechanism
4 结论
1)以平面开/闭链6R机构为基本单元,设计了一种可重构的空间开/闭链6R 移动并联机构。通过理论分析,验证了基于平面6R机构的打开与闭合可实现所设计的可重构移动并联机构的折叠、足式越障与滚动等运动模式。
2)运用MATLAB软件,对所设计的可重构并联移动机构的运动模式进行了分析,并运用ADAMS软件对其进行了仿真试验和对比。仿真结果与理论分析结果基本吻合,验证了该机构各运动模式的可行性,且该机构在稳定性、环境适应能力等方面均较为优良。
3)尚未考虑机构在斜坡、阶梯等地形处的运动可行性和稳定性,如何在斜坡、阶梯等复杂地形下建立机构的运动学模型并对其稳定性进行分析是下一步需要研究的内容。