一种快速响应型小卫星的自主任务规划设计与应用
2021-09-11崔本杰陈占胜
范 凯,崔本杰,陈占胜,成 飞
(上海卫星工程研究所,上海 201108)
0 引言
随着航天技术的快速发展,卫星在轨工作模式向智能化、自主化运行方向发展[1]。国内外相继开展了卫星自主任务规划技术的研究。美国国家航空航天局(NASA)在地球观测卫星(EO-1)的基础上,先后开发了“自主调度与规划”“调度和执行程序框架”两型卫星任务规划系统[2]。欧洲航天局(ESA)也支持了星载自主规划技术[3]。在规划算法方面,GRASSET-BOURDEL 等[4]研究了基于约束规划模型的回溯式启发式算法,该算法复杂度较低。SARKHEYLI 等[5]在研究低轨道卫星任务规划时,将任务优先级、资源约束和用户满意度纳入考量因素,设计了一种新的禁忌搜索算法进行求解。刘嵩等[6]基于任务规划过程的多种约束进行数学建模,针对该模型提出一种滚动规划启发式算法,将一次的全局任务规划过程划分为连续多次的局部规划。何永明等[7]给出了一种星上自主任务规划系统的设计方案,包括星上和地面系统,分别实现不同的功能并协同完成某些复杂任务。薛志家等[8]提出了一种启发式搜索与改进的突发性任务自主规划方法,完成目标任务所需的时序规划。杨正磊等[9]针对应急条件下成像卫星任务规划问题,建立了单任务综合规划模型,综合考虑了任务规划过程中卫星、测控及数传资源的分配。徐崇彦等[10]将卫星使用约束抽象为规划规则,设计了灵巧卫星启发式任务规划算法。以上研究在学术上均做出了一定的探索工作,但未做工程实现。在工程实践上,中国空间技术研究院在高分三号(GF-3)卫星上开展了自主任务规划及在轨验证,提出单次记录、单天线单站边记边放、单天线双站边记边放等9 种自主任务规划编排指令模板[11]。李德仁等[12]介绍了珞珈一号01 星夜光遥感设计与处理,实现了全国夜光一张图任务规划。余涛等[13]介绍了“天平”一号卫星提出了标校卫星任务规划方法,对精密定轨调度和标校数据处理业务流程进行了分析设计。以上卫星各具特点,但都针对特定任务,为基于地面上注任务的星上自主任务规划。
浦江一号卫星相比上述卫星,在星上实时引导成像自主任务规划做出了技术探索和在轨验证,是一颗快速响应型试验小卫星,于2015 年9 月25 日成功发射,卫星质量347 kg,运行在轨道高度约481 km的太阳同步轨道[14]。卫星有效载荷包括电磁信号监测、光学成像和星载图像处理,其中,电磁信号监测载荷实现对星下半锥角30°视场范围的电磁辐射信号的接收与定位,并用于引导相机成像;光学成像为离轴三反时间延时积分电荷耦合器件(Time Delay and Integration Charge Coupled Devices,TDI/CCD)线阵相机,采用一维机构驱动摆镜快速指向目标区域并进行可见光成像,地面成像分辨率优于3 m,相机瞬时成像幅宽24 km,扫描幅宽550 km;星载图像处理载荷实现对目标的快速自主识别、高精度定位。卫星自主任务规划软件、数管软件、姿轨控软件等共同运行于综合电子计算机,依托星上P1750处理器有限的处理资源,具备在轨多目标自主引导成像任务规划能力。本文介绍了浦江一号卫星自主任务规划的设计、测试及在轨应用情况。
1 自主任务规划设计
1.1 自主成像任务规划设计
1.1.1 自主成像任务规划工作原理
传统的卫星成像任务规划主要由地面管控实现,在地面确定成像区域、进行轨道递推、协调资源冲突、解算成像任务执行参数等,生成程控作业指令链,在卫星过境时上注星上。因星地链路无法实现全时互通,传统做法无法应对在轨实时新发现的目标,对地面管控支持依赖度较高,不适应日益增长的卫星应用便捷性、高时效性需求。
浦江一号卫星采用的星载电磁环境监测与光学成像自主任务规划技术,将地面管控功能高效地移植到星上,根据电磁环境监测载荷搜索范围大的特点对目标进行初定位,或根据地面实时上注的成像区域的定位信息,结合卫星当前轨道、姿态、载荷指向与调整方式等信息,星上实时接收电磁监测载荷的目标引导队列,进行目标优选,高精度求解相机摆镜指向与成像触发时刻,及时生成平台与载荷工作指令链,引导相机对优选目标成像。
浦江一号卫星在目标进入视场被载荷发现,到相机对目标推扫成像,一般不到30~60 s,星上需要在短时间内完成目标信号识别定位(2 s)、目标队列短时积累(5 s)、目标优选及星上引导计算(0.10 s)、摆镜指向调整(4 s)、偏流角精修调整(20 s),并在飞邻目标上空前5 s 开始成像,获取10 s 图像。针对实时性的目标引导成像任务,目标搜索及引导成像可视范围不断向前推进,短时最优并不代表全局最优,星上采用贪婪策略对不断滚动推进的局部视场中的目标进行快速优选,通过以下措施优选目标:1)装订信号库,做重点目标筛选;2)对积累的多个目标按优先级排序;3)多目标可见性计算,得到时间-摆角信息;4)采用贪婪算法确定满足时间约束及摆角切换约束的目标。
自主任务规划技术工作原理如图1 所示。

图1 浦江一号卫星自主成像任务规划工作原理Fig.1 Principle of autonomous imaging mission planning for PJ-1 satellite
1.1.2 自主成像任务规划工作模式
浦江一号卫星自主任务规划根据载荷特点及平台能力,设计了三种工作模式,分别为详查引导成像模式、快速引导成像模式、姿态机动引导成像模式。其中,前两种模式通过相机摆镜机构完成成像视场调整,后一种通过卫星姿态机动完成成像视场调整。卫星自主任务规划工作场景如图2 所示。
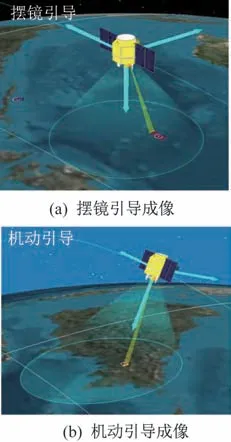
图2 引导成像示意图Fig.2 Schematic diagram of guiding imaging modes
1)详查引导模式。由相机的滚动轴摆镜机构完成成像视场调整,实时进行成像点偏流角修正,尽可能地提供引导区域的清晰图像,由姿轨控修正摆镜摆角变化引起的偏流角偏差,具备多区域引导成像能力。
2)快速引导模式。由相机的滚动轴摆镜机构完成成像视场调整,仅修正星下点偏流角。相比详查模式,虽然大角度的成像质量稍有降低,但节省了偏流角精修的时间,尽可能地扩大了可引导成像的区域,提高了成像概率。
3)姿态机动引导模式。主要基于摆镜机构单点故障而设计。可在摆镜故障时,通过姿态机动代替摆镜调整成像视线指向,视线引导姿态机动,对自主任务规划的整个流程进行验证,如图3 所示。
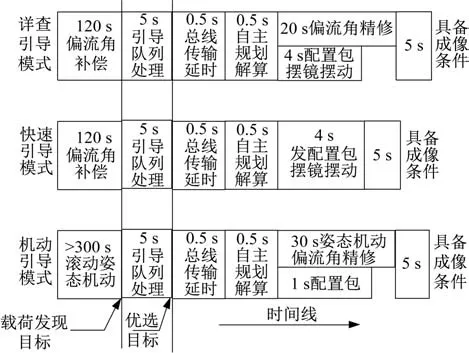
图3 工作模式时序图Fig.3 Sequence diagram of operation modes
为实现卫星高速运动时多目标连续引导成像,兼顾偏流角修正保证图像清晰,设计了基准姿态角、基准摆角、摆角控制量作为模式调控因子,确保图像清晰,成像又快又稳。成像任务规划、偏流角计算与控制的调控因子关系如图4 所示。
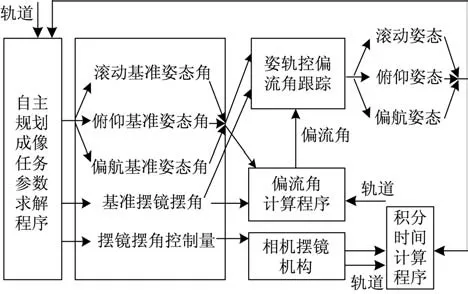
图4 软件信息流Fig.4 Software information flow
1.1.3 自主任务规划的信息流设计
浦江一号卫星自主任务规划涉及了平台的综合电子、全球定位系统(Global Positioning System,GPS)、姿轨控等功能模块,以及电磁环境监测、相机、图像处理三型载荷,信息流主要通过1553B 总线、RS422、综合电子公共数据区、SpaceWire 等形式传输。信息流辅助完成的主要功能包括主任务规划、姿轨控模式调控与偏流角跟踪控制、电磁环境监测定位、GPS 信息传输、相机偏流角、积分时间计算与成像控制、图像处理载荷精确定位、相机与图像处理载荷图像数据传输、高程检索等。成像任务自主规划信息流如图5 所示。
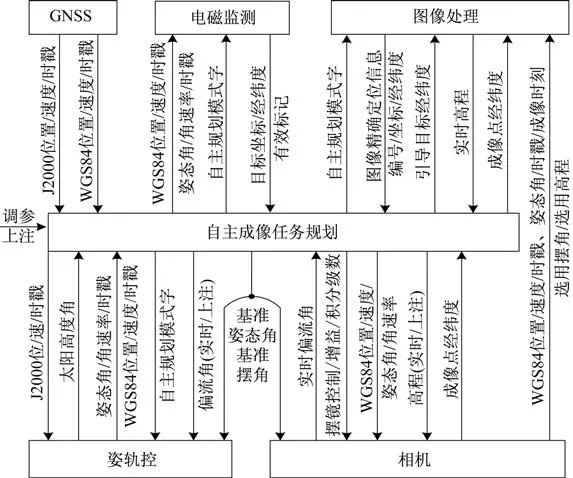
图5 自主任务规划信息流Fig.5 Autonomous task planning information flow
1.2 自主运行任务作业实施设计
为了解决卫星应答机故障或者星地测控无法保障时卫星失效问题,卫星通过判断未收到地面上行控制作业时长,判断卫星升降轨、卫星经纬度,在上述3 个条件均满足的情况下通过计算机程控方式实施有效载荷作业和数传作业。
1)卫星未收到地面上行控制作业时长判断。在综合电子计算机数据管理软件内部设置一软时钟,在执行完末次地面上行控制作业后开始计时。如果计时达到既定时长,则执行卫星升降轨的判断和卫星当前位置的判断;计时达到既定时长,且卫星升降轨和当前位置均满足条件时,卫星综合电子计算机数据管理软件发出有效载荷作业和数据传输作业的程序控制指令,作业完成后计数器清零并开始重新计数;如果计时过程中未达到既定时长时收到地面上行控制作业,则计数清零。
2)卫星升降轨的判断。卫星升降轨根据卫星轨道幅角进行判断:轨道幅角0°~90°、270°~360°区间为卫星降轨,轨道幅角90°~270°区间为卫星升轨。
3)卫星星下点位置的判断。设置降轨执行任务判断区(经度范围En1~En2,纬度范围Nn1~Nn2,单位均为°),当卫星星下点经度在En1~En2 之间、纬度在Nn1~Nn2,且卫星为降轨时,则自动执行任务。
设置升轨执行任务判断区(经度范围En3~En4,纬度范围Nn3~Nn4,单位均为°),当卫星星下点经度在En13~En4 之间、纬度在Nn3~Nn4,且卫星为升轨时,则自动执行任务。
卫星降轨时星下点执行作业判断区,经度范围130°~145°,纬度范围65°~70°,当卫星星下点经度和纬度在该区域内,且卫星为降轨时,则卫星自主实施有效载荷和数据传输作业。卫星升轨时星下点执行作业判断区,经度范围120°~135°,纬度范围-5°~0°,当卫星星下点经度和纬度在该区域内,且卫星为升轨时,则卫星自主实施有效载荷和数据传输作业。卫星在轨自主实施作业任务的判断区域示意图如图6 所示。
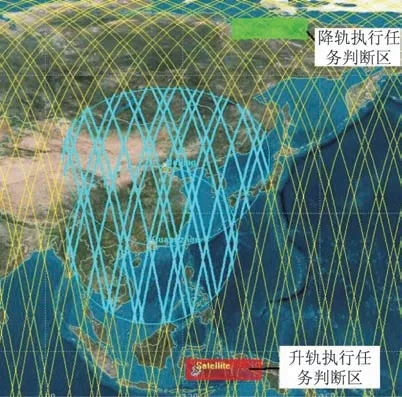
图6 卫星在轨自主实施作业任务的判断区域示意图Fig.6 Schematic diagram of the judgment area for the autonomous operation of the satellite on orbit
2 自主任务规划地面验证
2.1 地面测试系统
卫星自主规划设计的地面试验验证,是在轨成功应用的关键所在,飞机搭载试验与地面车载试验成本高、操作繁琐,同时星地相对运动关系由于速度、大气、姿态测量、稳定性等极难贴近真实状态,不具备验证可行性。设计了测试数据实时驱动STK 软件场景的测试验证系统,如图7 所示。基于C++语言开发,以整星测试遥测数据与姿轨控动力学数据,实时驱动视景仿真计算机,充分利用STK 软件中的矢量运算功能,通过比对视景仿真中可视化的卫星位置、姿态、摆镜位置、视轴与地面目标相对关系,通过场景反演的偏流角等相关信息,与设计值进行一致性比对。目标数据采用电磁环境监测单机模拟或采用地面上注方式。
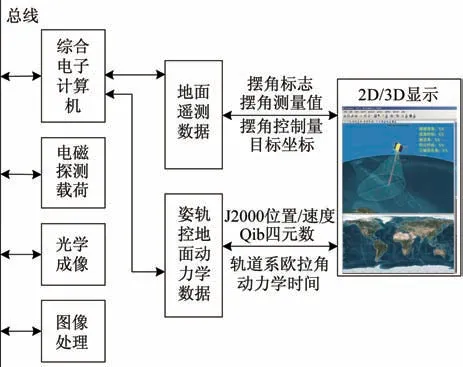
图7 自主任务规划测试系统连接图Fig.7 Connection diagram of the autonomous task planning test system
2.2 地面测试数据
在卫星研制过程中进行了自主任务规划功能测试,验证了自主任务规划算法正确性,相机偏流角、积分时间算法正确性,图像处理载荷高程查找正确性,GPS信息源、姿轨控跟踪偏流角正确性,姿轨控WGS84数据正确性,引导输出摆角控制信息和成像时序等。
以整星真空热试验过程中的自主任务规划作业为例,热平衡高温工况、热真空试验高低温保持期间共执行9 次自主任务作业18 个成像目标,18 个目标分布在南北半球太阳照区,如图8 所示。
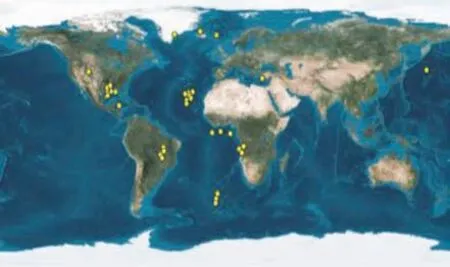
图8 测试用例目标位置示意图Fig.8 Target coordinates for the test
根据自主任务规划的求解与执行结果,对计算误差、引导指向误差进行了统计,见表1。计算误差是指在成像时刻、理想姿态、摆角控制准确、无轨道误差情况下,星上自主规划核心算法输出的求解结果经过地面高精度递推模型后,相机CCD 成像中心点与目标坐标的误差。引导指向误差是指在计算误差基础上,叠加姿态控制误差、摆镜指向控制误差等的因素,相机实际成像中心点与目标量测位置的误差。
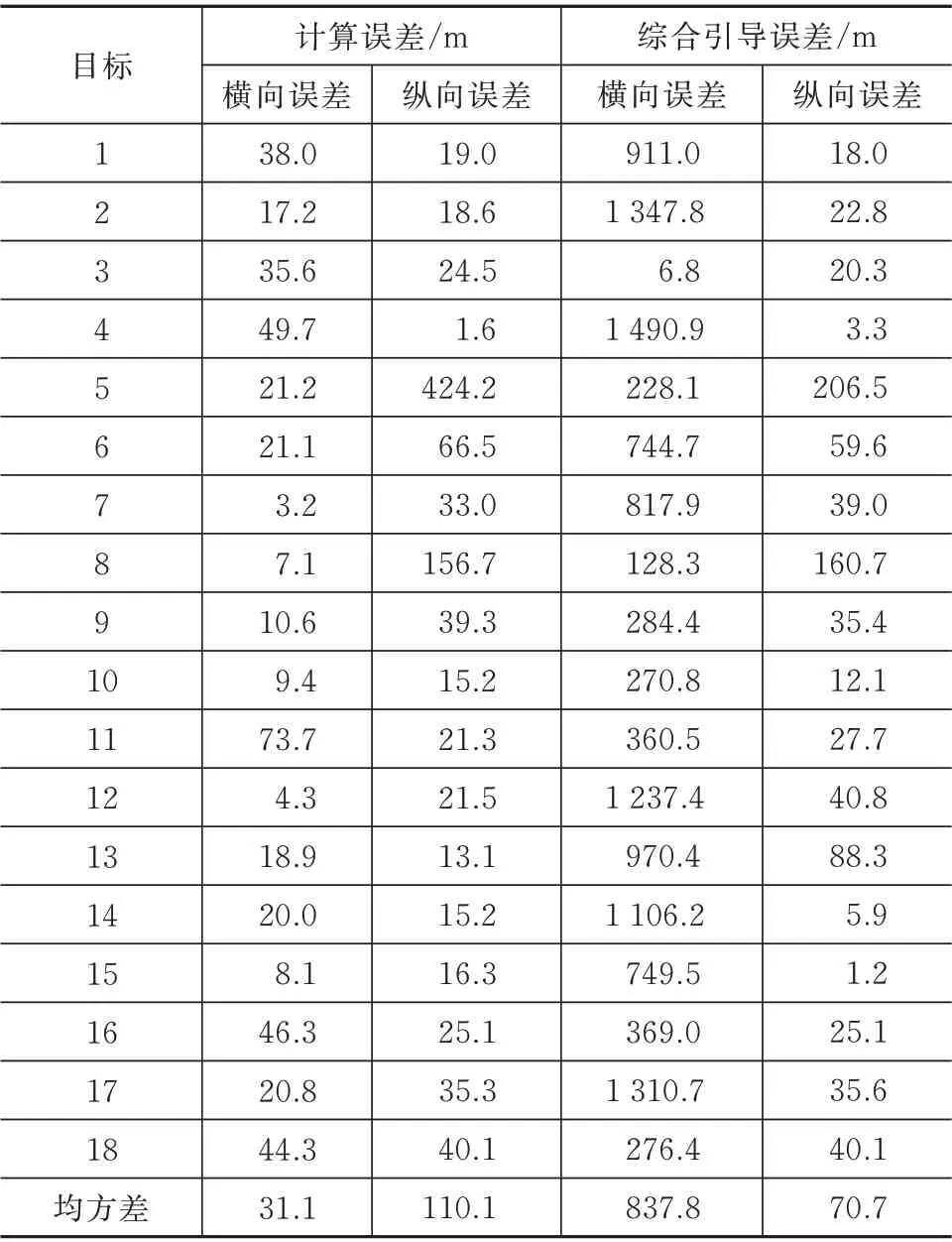
表1 计算误差与综合引导误差结果Tab.1 Results of calculation errors and integrated guidance errors
采用厂房测试的计算结果遥测、摆镜摆角遥测、三轴姿态角遥测等,进行事后数据分析,得到表1的结果。可见综合解算横向误差均方根31.10 m,纵向误差110.10 m,综合引导横向误差均方根837.80 m(等效481 km,角度0.099 7°),纵向误差均方根70.70 m,纵向代表卫星星下轨迹方向,横向指与轨迹垂直方向。
通过星上遥测记录18 个目标的星上引导解算时间,统计得出星上自主任务规划时间优于0.10 s。
3 在轨应用情况
浦江一号卫星在轨开展了自主任务规划在轨测试和应用,在轨测试期间,先后执行了数百次自主任务规划作业。以2015 年10 月15 日单目标自主任务规划为例,引导成像结果如图9 所示。图中,“真实位置”代表地面目标所在位置,“星上定位”代表电磁监测载荷测量得到的目标位置。引导试验中电磁环境监测星上定位误差2.41 km,因平台指向+相机摆镜角度偏差导致的引导指向误差横向部分343.40 m,目标真实位置与成像引导视场的中心横向偏差2.54 km,处于24 km 幅宽中心附近,电磁监测引导成像对目标捕获成功。
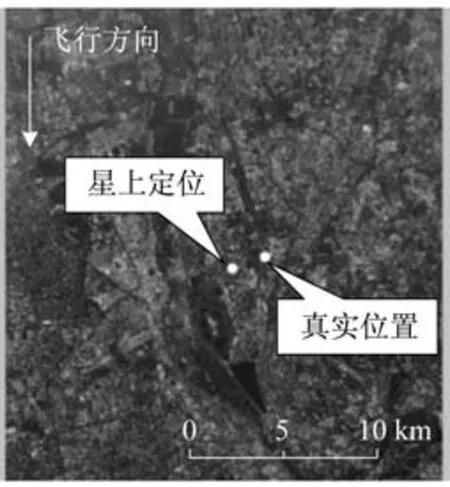
图9 电磁环境监测引导光学成像在轨图片Fig.9 On-orbit image by electromagnetic detection guided optical imaging
以2015 年10 月27 日多目标自主任务规划为例,卫星对黑海、地中海、北非附近连续11 个区域进行了快速引导多区域成像任务,11 个区域连续成像成功执行,每个区域成像10 s。区域与卫星位置关系如图10 所示。

图10 连续成像目标分布图Fig.10 Target distribution of continuous imaging
在轨应用表明,浦江一号卫星自主任务规划的单目标引导成像横向求解精度优于100 m,摆镜指向控制精度优于0.10°,成像时刻求算时间小于40 ms。星上成像载荷可通过绕滚动轴摆镜快速调整成像区域,具备对多目标自主、快速、连续成像的能力,单次作业实现规划目标数优于10 个。
浦江一号卫星自主任务规划引导效率高、精度高,缩短了卫星任务管理链条,在快速发现、识别、确认等应用方面发挥了重要作用,在轨应用获取了大量高价值的电磁信号及影像数据。
4 结束语
本文对浦江一号卫星自主任务规划的设计、测试及在轨应用进行了详细介绍。浦江一号卫星自主任务规划设计主要解决突发性、随机性目标的成像任务,减少了卫星任务对地面的依赖,缩短了电磁信号监测载荷与光学成像载荷配合时间,探索了多载荷综合探测技术,优势互补,解决共视场、同时域、即听即看的难题。同时也应看到,浦江一号卫星光学相机受光照、气象条件影响,使用有一定的局限性。浦江一号卫星突破的单星多手段协同应用的自主成像任务规划方法,可推广至宽频段电磁信号监测与高光谱成像、红外成像、合成孔径雷达成像综合应用,以实现全天时、多维度信息获取。
