基于柔性机构的大位移压电驱动非对称微夹钳设计
2021-09-10李静
李 静
(河南工学院 电子信息工程学院,河南 新乡 453000)
0 引 言
微操作技术作为前沿科技的一项关键技术,在微机电系统(MEMS)、精密工程、光纤对接、生物工程等领域受到广泛关注[1]。微夹钳作为微操作的末端执行器,主要由驱动机构、位移传递机构、执行机构[2]构成。应用于微夹钳的常见驱动方式有压电驱动、静电驱动、电热驱动、记忆合金驱动、电热驱动等[3],相比于其他驱动方式,压电驱动具有响应速度快、灵敏度高、输出力大的优点[4]。现今,微夹钳的主要研究方向为提高夹持精度、扩大夹持行程[5]。
一方面,平行夹持作为提高夹持精度主要途径,平行夹持可以夹持不同形状的不规则物体;相比于角夹持,平行夹持可以避免对薄壁物体造成应力集中;另一方面,非对称微夹钳相对于对称微夹钳夹持力的力学精度更容易控制。传统的刚性机构由于其构件间摩擦、装配间隙等问题,很难实现高精度操作,不符合微夹钳设计要求,柔性机构具有无摩擦、免装配的优点,符合产品需求,广泛应用于微操作领域。
扩大夹持行程主要通过位移放大机构完成。目前常见的放大机构有杠杆放大机构[6]、平行四杆机构[7]、菱形放大机构[8]、桥式放大机构[9]。单级放大机构扩大行程有限,大位移高倍数位移放大主要通过多级放大机构完成;文献[10]采用单级放大原理,理论放大比为4倍,且不能平行夹持;文献[11]采用单级放大原理,实际夹持行程为190 μm,放大比为9.5倍;文献[12]采用二级放大原理,实际夹持行程为320 μm,放大比为16倍;文献[13]虽采用二级放大原理,但铰链约束过多,导致实际放大比仅为4.66倍;文献[14]采用二级放大原理,实际夹持行程为300 μm,放大比为15倍;文献[15]采用二级放大原理,实际夹持行程为328 μm,放大比为16.4倍。综上所述,关于微夹持机构的研究已经取得了丰硕的成果,但不难发现,提高压电驱动微夹钳放大倍率是一个主要研究方向。提高微夹持精度(夹持力精度和夹持位移精度是必要的。因此,有必要设计一种位移放大倍率高、夹持精度高、结构紧凑的压电驱动非对称微夹钳。本文设计的压电驱动非对称微夹钳最大位移放大率为19.1,具有高放大率、高精度、结构紧凑的特点。
1 微夹钳设计
1.1 夹钳结构
微夹钳结构图如图1所示,主要由桥式放大机构、杠杆放大机构、平行四杆机构、螺纹固定孔等结构组成。微夹钳尺寸为68.8 mm×24.1 mm×5 mm,通过固定座将微夹钳固定在微操作平台上,直流电源通电后,压电陶瓷伸长,使桥式放大机构产生向内的拉力,通过弯曲梁带动杠杆放大机构向内运动,完成微夹钳的夹持动作。
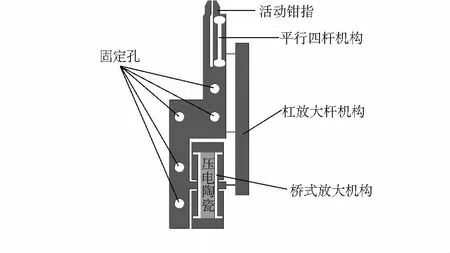
图1 微夹钳结构
1.2 桥式放大机构分析
菱形放大机构的机构图如图2所示,压电陶瓷通电机构发生变形,水平方向发生的变形量为2Δx,竖直方向发生的变形量为2Δy。

图2 菱形机构变形
桥式放大机构为对称结构,四条桥式臂的变形量相同,取一条桥式臂进行受力分析,对应的受力分析图如图3所示,取图2左上边桥式臂AB进行分析,压电陶瓷产生水平推力后A点沿水平方向向左运动到A′处,B点沿竖直方向向左运动到B′处,设菱形臂AB所受力矩为逆时针,则菱形臂AB所受力矩为2Mr。

图3 菱形机构单臂变形
根据受力关系,得出关系式如下
(1)
取桥式臂AB上任意一点,距离A点距离为c,对应的力和力矩方程分别为
(2)
根据卡氏第二定理,桥式臂在x方向的变形量
(3)
式中EA为抗拉刚度,EI为弯曲刚度。
同理,桥式臂在y方向的变形量
(4)
桥式放大机构位移放大比
(5)
基于伪刚体模型法[16]对双杠杆放大机构进行分析,机构的伪刚体模型如图4所示,下端杠杆放大机构运动带动上端杠杆放大机构发生二次变形,机构未发生变形时线段OA与水平方向的夹角为θ,机构发生变形后,夹角θ的变化量为Δθ,则存在如下几何关系
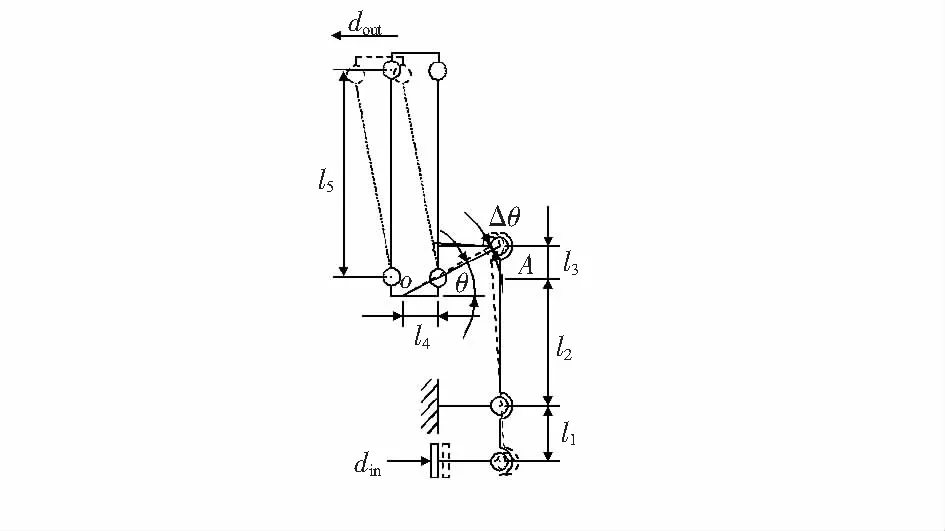
图4 双杠杆放大机构伪刚体模型
(6)
dp=l5[sin(θ+Δθ)-sinθ]
(7)
在运动过程中,柔性铰链产生微小变形,最大变形量通常不超过本身尺寸的0.1%,则Δθ≈0,所以机构的位移放大率可以表示为
(8)
因此,微夹钳位移放大比
(9)
2 有限元仿真分析
微夹钳及微零件选材为7075铝合金,弹性模量E=71 GPa,泊松比ν=0.33,屈服强度σ=80 MPa,密度ρ=2 770 kg/m3。压电陶瓷选用PST150/2×3/20,标称位移为20 μm,通150 V直流电后,微夹钳的位移云图如图5所示。输入端压电陶瓷伸长量达到标称位移20 μm后,微夹钳活动钳指的单边输出位移为381.97 μm,放大倍数为19.1倍。与之对应应力强度为249.6 MPa,小于铝合金屈服强度480 MPa,产品正常使用。此时微夹钳钳指的偶合位移为0.24 μm。

图5 有限元性能分析
由图6(a)可知,压电陶瓷通电后,压电陶瓷伸长量与单边输出位移均呈线性关系,说明位移传递机构稳定性高;由图6(b)可知,位移传递机构的单边输出位移和偶合位移呈线性关系,耦合位移率为0.06 %。

图6 位移传递机构性能关系
固定微夹钳的螺纹孔,对微夹钳进行模态分析,得出各阶模态对应的固有频率,为检测微定位平台的模态振型和模态频率。取前4阶模态图,相应的共振频率如图7所示。结果表明,1 034.4 Hz下的第1阶模态是由桥式放大机构沿Z轴方向旋转变形引起的。1 723.7 Hz下的第2阶模态、2 439.7 Hz下的第3阶模态是由竖直方向桥式放大机构弯曲变形引起的,5 225.3 Hz下的第4阶模态是机构整体弯曲变形引起的。
从图7的4阶模态振型图可以看出,有限元模态分析结果显示4阶模态与机构的广义坐标对应的模态一致,是所需要的振型,固有频率约为5 225.3 Hz,而其余3阶不需要的模态振型会通过自行设计的柔性支撑结构进行抑制,对此,不进行考虑。
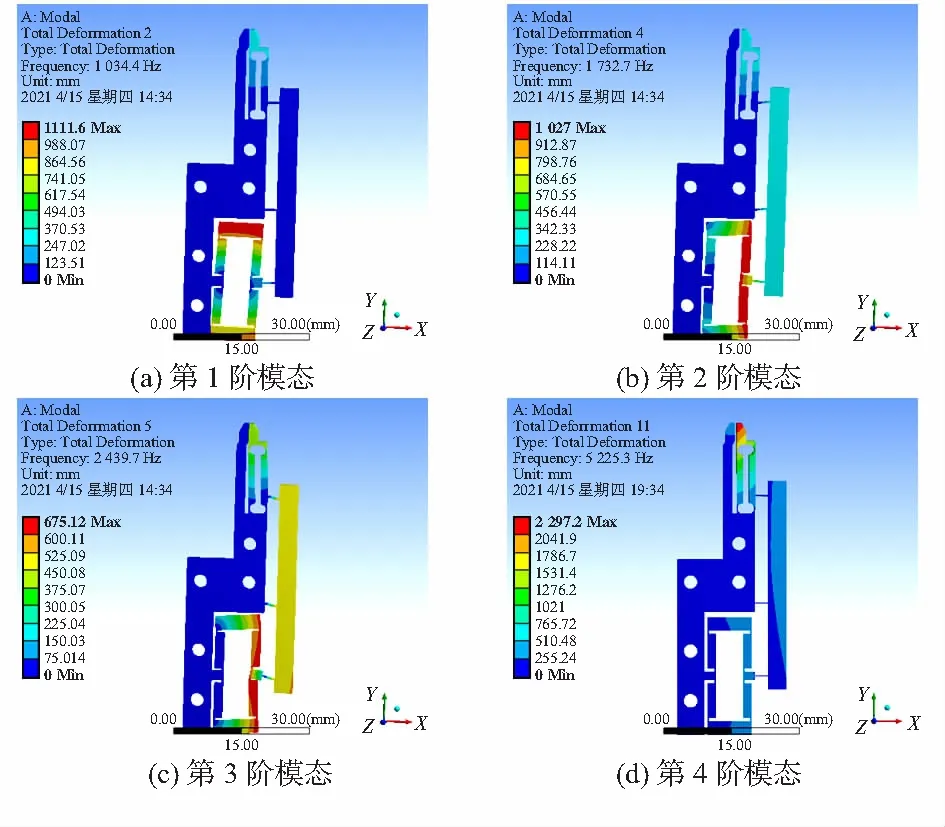
图7 微夹钳前4阶模态
3 结 论
本文基于组合方法原理设计一种柔性压电微夹钳,为了获取较大的位移放大比,位移传递机构采用三级放大机构。为了获取较高的夹持精度,夹持机构采用平行夹持,位移传递机构采用非对称结构设计。有效提高了微夹钳的位移放大比和夹持精度。结合“伪刚体模型”思想,计算出微夹钳的位移放大比,通过有限元仿真分析得出微夹钳的性能,结果表明,本文设计的微夹钳与同类微夹钳相比,有着较大的夹持位移和较高的放大倍数。