微半球谐振陀螺仪的模态主轴方位角测算方法*
2021-09-10丁徐锴李宏生
吕 骞,丁徐锴,陈 鹤,贾 佳,李宏生
(1.东南大学 仪器科学与工程学院,江苏 南京 210096;2.东南大学 微惯性仪表与先进导航技术教育部重点实验室,江苏 南京 210096)
0 引 言
微半球谐振陀螺仪是一种基于科里奥利效应工作的高精度新型固体振动陀螺[1,2],一种没有高速转子和活动支承,由半球壳的径向振动驻波的进动效应来感应基座旋转的陀螺仪。其具有体积小、重量轻、功耗低、结构简单、可靠性高、工作寿命长等独特优点[3],被国际惯性技术学界认为是21世纪最适用于航空航天器捷联惯导系统的理想器件[4,5]。
然而,由于工艺的限制,微半球谐振子加工过程中存在许多不理想的因素,如吹制过程中温场不均匀、成型后研磨释放不水平等。而这些加工误差导致微半球谐振子机械结构出现偏差,破坏其结构的对称性[6]。从测控系统角度来看,这类误差将导致谐振子的工作模态频率出现裂解,且模态主轴轴向也不再是任意方向,这将严重影响了陀螺仪的性能。
为了确定谐振子模态主轴位置,李巍等人[7]通过推导振动位移的表达式并通过安装两组激励电极及位移传感器来测试模态主轴方位。王锦等人[8]分析不同角度检测电极处的频率响应特性,通过频率响应参数计算谐振子模态主轴轴向。
本文将根据理想振动式陀螺仪的通用运动方程对微半球谐振子误差模型进行推导,再根据推导所得的微半球谐振基本误差模型研究微半球谐振子的频率误差,提出了一种可以通过电扫频所得数据计算微半球谐振子频率主轴方位角的方法,在微半球谐振子结构误差研究和机械修调领域具有指导意义。
1 微半球谐振子基本误差模型推导
理想振动式陀螺仪的通用运动方程如下[9,10]
(1)
式中x,y为理想谐振子运动主轴方向的位移;ω0为理想谐振子工作模态的固有频率;Q0为品质因数;Ω为基座旋转的角速度;η为角度增益系数;η′为向心力增益系数;gx,gy为理想谐振子沿主轴方向施加的外界加速度。
(2)
其中,
设L=[x,y]T则
Lω=PωL
(3)
式中Pω为谐振子沿{x,y}轴位移至频率主轴方向位移的旋转矩阵。将式(3)代入式(2)可得
(4)
当谐振子运动环向谐波数n=2时
①大写字母表示形状、特征、性质,如:U-tube U形管;I-beam工字钢;T-ruler丁字尺;Y-section三通接头管。
(5)
而谐振子阻尼误差同样可以利用两模态时间常数结合阻尼主轴方位角建模。在式(4)加入阻尼项后,可以得到微半球谐振子运动的基本误差模型
(6)
(7)
式中θτ为谐振子阻尼主轴方位角,τ{1,2}为谐振子两个工作模态的时间常数。
由于式(6)并未显式表示质量误差,而在陀螺仪测控系统设计中质量摄动引起的误差是无法避免的,故引入质量摄动矩阵[11],可将式(6)改为
(8)
式中m0为谐振子模态等效质量;F为谐振子所受外力的向量矩阵;[ε]为非理想谐振子质量摄动系数矩阵。[ε]的表达式如下
式中ε{1,2}为理想谐振子质量摄动系数,其值通常均为小量。
2 微半球谐振子模态主轴方位测算原理
设在谐振子工作在n=2模态
F=f+KTL
(9)
式中f为作用在工作模态的等效基频静电力;KT则为等效静电刚度矩阵,其表达式为
式中kT11为激励电压在x轴向上产生的静电刚度,kT12和kT21为激励电压在x与y轴向间产生的耦合静电刚度,kT22为激励电压在y轴向上产生的静电刚度。当两个轴向上所加的激励电压大致相同时,kT11≈kT22。
将式(9)代入式(8),则得
(10)
对式(10)进行拉氏变换,可得
(11)
式(11)给出了基频静电力f至谐振子位移的传递函数。其中,T{x,y}/f{x,y}(s)为{x,y}轴向静电力到{x,y}轴位移的传递函数。T(s)中副对角线传递函数反映了谐振子模态之间的耦合,若其为零,则谐振子沿{x,y}轴向的运动互相独立,其模态主轴与{x,y}重合。但实际上由于加工误差的存在,微半球谐振子模态主轴与{x,y}轴之间总存在误差角θω。
将式(5)和式(7)代入式(11)。同时,为了便于分析微半球谐振子频率误差的特点,可先忽略阻尼误差,则有τx=τy=τ0,2/τc=0。又由于质量摄动引起的误差对频率误差影响较小,故可忽略,取ε1=ε2=0。进而,可得
(12)
由于真空封装的全对称微半球谐振子的Q值较高[12~15],因此可忽略其阻尼对于谐振频率的影响,又当两个轴向上所加的激励电压大致相同时,kT11≈kT22=kT0,则式(12)中传递函数的两对极点分别为
(13)
(14)
式中 上标*指共轭。又根据式(12)解得传递函数Tx/fx(s)的一对零点可由下式确定
(15)
将式(13)和式(14)代入式(15),可得
(16)
式(13)和式(14)表明,传递函数T(s)的极点反映了谐振子在当前偏置电压下的模态频率。而根据式(16),可以通过电扫频的方式,利用Tx/fx(s)的零、极点确定谐振子工作模态主轴方位角。
3 实验与仿真验证
3.1 实验测算
为验证式(16)对确定微半球谐振子频率主轴方位角的有效性,搭建测试实验平台对微半球谐振子进行电扫频实验。微半球谐振子及实验平台如图1所示。

图1 微半球谐振子及实验平台
考虑到在推导式(16)过程中忽略了阻尼项,本文分别试验了Q值为1 930(1#谐振子)和13 390(2#谐振子)的两个微半球谐振子,以实验微半球谐振子Q值大小不同对式(16)计算主轴方位角的影响。
首先对两个微半球谐振子进行电扫频。为了保证扫频过程中两个模态静电力刚度近似相同(kT11≈kT22),对两个模态电极加相同的直流激励电压,并对x模态加交流激励电压进行电扫频,得到微半球谐振子x模态的幅频特性曲线如图2所示。
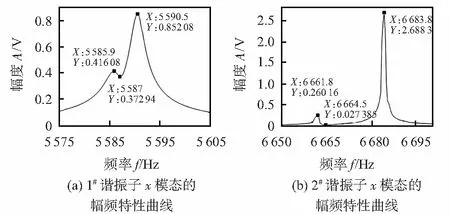
图2 电扫频所得微半球谐振子x模态的幅频特性曲线
对所得数据进行分析,得到两个谐振子的零极点频率值如表1所示。并根据式(16)计算得两个微半球谐振子的频率主轴方位角分别为30.36°和34.75°。

表1 微半球谐振子零极点频率值
3.2 仿真检验
用MATLAB对式(12)的Tx/fx(s)进行建模仿真,验证实验结果。由于无法直接得到式(12)中的静电力刚度kT11,kT22,故首先对两个微谐振子进行静电力刚度实验,得到微半球谐振子x模态谐振频率与电极所加直流电压的关系数据,并对其进行二次拟合,结果曲线如图3所示。根据图3可知,较低的直流激励电压对模态谐振频率的影响极小,故可在仿真时忽略项kT11/m0,kT22/m0。

图3 微半球谐振子x模态谐振频率与静电力关系曲线
下一步根据所得两个微谐振子的模态谐振频率(极点频率)及计算所得方位角进行仿真,结果如图4所示。根据图4可知,仿真所得的零点频率分别为5 587.1 Hz和6 664.5 Hz,与实际测量所得零点位置频率基本重合。

图4 微半球谐振子x模态仿真幅频特性曲线
根据以上结果可知,式(16)可以有效确定微半球谐振子的模态主轴方位角,且微谐振子值Q越大,计算结果越准确。
4 结 论
本文对微半球谐振陀螺仪的谐振子误差模型进行了研究,首先根据理想振动式陀螺仪的通用运动方程推导出微半球谐振子的误差基本模型;再根据该基本误差模型提出了一种可以通过电扫频测算微半球谐振子频率主轴方位角的方法;通过实验测量两个Q相差较大的微半球谐振子频率主轴方位角分别为30.36°和34.75°,利用仿真验证了本文方法测得的主轴方位角的有效性。本文所介绍的微半球谐振子频率主轴方位角计算方法对于在微半球谐振子结构误差研究和机械修调领域具有指导意义。