海底光缆磁法探测技术研究与应用*
2021-09-10周普志李正元沈泽中殷征欣吕修亚贺惠忠董超
周普志,李正元,沈泽中,殷征欣,吕修亚,贺惠忠,董超,2
1. 国家海洋局南海调查技术中心,广东广州 510275
2. 自然资源部海洋环境探测技术与应用重点实验室,广东广州 510275
近年来,随着信息产业全球一体化建设的加快,我国海域内海底光缆建设数量均处于迅速发展阶段。海底管线路由勘察是海底管线工程建设前期工作的关键环节之一[1],为审批路由铺设提供了依据,也为海底光缆建设的路由选择、施工设计、铺设施工、运营维护等提供了必需的基础资料。海底管线勘察中的路由指的是海底光缆在海底从起点到终点的路径,它的宽度一般在500~2 000 m 之间,呈条带状。路由勘察即是沿着预选路由专门针对海缆工程而进行的海洋工程勘察[2]。
由于海底光缆路由勘察海域存在着已铺设管线,特别是与之纵横交错的已建海底光缆。经过了岁月的变迁, 这些海底光缆在海域中的坐标是否有了变化,是否还存在也不明确。此外,过去敷设海底光缆时的定位仪器存在很大的误差[3]。目前,探测海底光缆的方法有磁法探测、侧扫声呐探测、浅地层剖面探测和海缆追踪探测等多种方法[2,4],磁法探测主要是针对掩埋较深,管径太细的管线探测[5]。根据海底光缆的铠装钢丝在地磁背景场中形成的磁信号异常对其进行探测识别的装备精度较高、探测效果较好[6]。随着高精度定位技术的应用,在深水磁力调查中引入USBL 进行磁力拖鱼的定位,能获得可靠稳定的高精度目标位置[7]。
1 海底光缆磁法探测原理
海底光缆在浅水段为避免锚害,通常采用中继型双层铠装光缆,如图1-2所示。其由纤芯、光信号转发器、铁磁性包裹层、阻水保温层、防压防腐层等结构组成[8]。
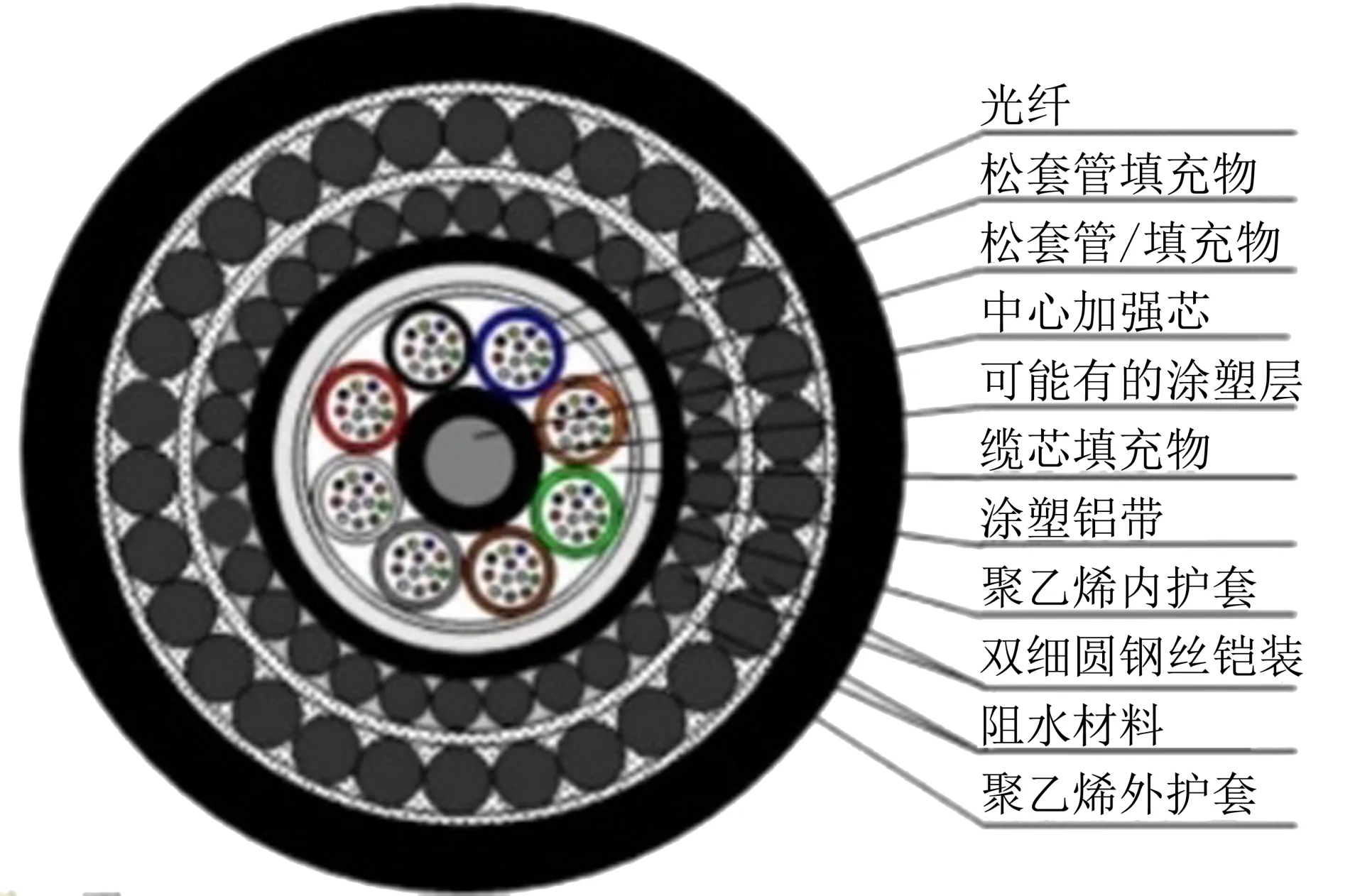
图1 海底光缆截面图Fig.1 Submarine optical cable cross section

图2 海底光缆纤芯Fig.2 Submarine optical cable core
海底光缆产生磁异常的原因有两种,一是光缆包裹层含有刚性或其它能产生磁异常的铁磁性材料,光缆就相当于一个无限延伸的圆柱体产生的磁异常;二是为了达到光信号远距离传输的需要,在光缆上都要加装一定数量的光信号中继器,这些中继器必须依靠远供电源系统的电流才能正常工作,这个电流为直流或是低频电流,磁力仪能采集到此类电流产生的磁异常。
因此,海底电缆磁场模型由铁磁性材料自身产生的圆柱体磁场模型和附加电流磁场模型组成[9],即

其中△T为国际光缆磁异常;△T1为光缆包裹层磁性材料自身产生的磁异常;△T2为远供电源系统电流产生的磁异常。
1.1 包裹层磁性材料磁异常分析
将包裹层磁性材料理想化为无限长水平圆柱体产生的磁异常,如图3所示。

图3 海底光缆包裹层磁场模型坐标系Fig.3 Magnetic model coordinate system of submarine optical cable integument
假设海底光缆的横截面积S,探测高度D,光缆磁导率为μ0,有效磁化强度为Ms,有效磁化倾角为is,地磁倾角为I,测线方位角为A,磁力仪在测线上连续记录的理想磁异常分布为

1.2 远供系统电流产生的磁异常分析
将远供系统电流产生的磁异常理想化为无限长载流导线在其周围空间产生的磁异常,根据安培定则,线电流产生的磁场强度H为其中i为电流强度,r为海底光缆距离测线上任一测点的垂直距离。

由于磁力仪测得的异常值视为磁场强度H在地磁场T0方向上的分量,远供电源系统电流产生的磁异常为

其中α为电流磁场H与水平面的夹角,I为地磁倾角,如图4所示。

图4 海底光缆电磁场模型坐标系Fig.4 Electromagnetic model coordinate system of submarine optical cable
可见,海底光缆产生的磁异常与探测高度、光缆外径、电流强度有关。磁力仪距离海底越近、光缆外径越大,通过电流强度越大的光缆产生的磁异常越大。
1.3 图像定位法
由于光缆磁异常值有一定范围的幅宽,且因其走向、所处地理纬度以及埋深的不同,实际测量时所得到的二维图像也是大相径庭的。磁力仪在海底进行光缆探测时测得的磁异常曲线是光缆本身包裹磁性材质的异常和远供电流产生的异常值的叠加,在图像上往往是非对称图像。
刘胜旋曾提出过对已铺设电缆具体位置的图像定位方法[10],如图5 所示。其中,5(a)是关于y轴对称的磁异常曲线,极值点在航迹线上的投影点就是海底电缆在海平面的投影点。5(b)是关于原点对称的异常曲线,曲线的拐点在航迹线上的投影点就是光缆在海平面的投影点。5(c)是非对称的异常曲线,则根据其与上述两种对称曲线的接近程度来确定光缆的定位点。如与y轴对称的曲线较接近,则其定位点较接近极值点。5(c)如与原点对称的曲线较接近,则其定位点较接近拐点,如图5(d)所示。
2 平面位置定位法
海底光缆根据水深一般有两种铺设方式,在水深大于500 m 的陆坡及海盆区域,由于受到人类活动影响较少,一般采用直接敷设在海底的方式,而陆架及近岸即水深小于500 m 的区域,通常采用挖沟埋设的方式保证海底光缆安全。精确定位光缆的平面位置和走向需要根据其埋设方式和状态选择相应的探测方法。
对于直接敷设的深水区光缆,可采用侧扫声呐顺光缆走向布设三条测线,其中一条测线应沿路由布置,其余测线布置在路由两侧,测线间距按成图比例尺不同可设定为25~100 m[11]。对于埋设的光缆,由于潮流或其他原因,预挖沟槽被冲蚀后难以识别,又由于光缆直径小,侧扫声呐或浅地层剖面均难以探测到,通常采用磁法探测。首先,应根据路由选择依据说明材料,充分了解预选路由上可能交越的已铺设在运营的国际光缆走向,划定大致的交越点靶区。然后,垂直于已铺设缆线布设测线,将多条测线测得的磁异常点位置连线,即可确定埋设光缆的平面位置和走向。
2.1 测线布设原则
磁法探测通常用拖曳式磁力仪,而水深10 m的海底通信光缆或者动力电缆产生的磁异常宽度范围通常为75~100 m[12]。测线应垂直于已铺设电缆走向布设,在交越点探测区域,为确保磁力仪不受调查船船磁影响,线长度不小于500 m,测线间距不大于200 m[11],根据磁力仪实测信号强度和磁异常幅值,适当加密测线或增加备用测线。
2.2 船载定位设备
为保证调查区域的定位精度,通常采用星站差分GPS。市场上已经得到广泛应用的星站差分系统有三家:美国的Starfire、荷兰的OmniStar、挪威的VeriPos,可实现分米级甚至厘米级实时定位。
2.3 水下定位设备
由于海底光缆磁法勘察过程中需要将磁力仪拖曳于船尾,为尽可能消除船磁干扰,一般选择缆长约为三倍船长。受到流速流向的影响,如果直接使用船载GPS 计算后拖距离势必产生较大的定位误差,为获取磁力仪拖鱼的精确位置,需要使用水下导航定位系统。
水下导航定位系统主要有三种形式:超短基线(USBL)定位系统、短基线(SBL)定位系统、长基线(LBL)定位系统。目前在海底光缆路由勘察中,主要使用超短基线导航定位系统为水下拖体提供精确的定位信息。将超短基线声学定位系统的换能器通过固定杆安装在调查船船舷或者穿舱方式安装(主流方式是安装在船舷),船舷式安装操作相对简便。调查作业时,将水下信标绑缚在需水下定位的目标上即可,而且可以同时跟踪多个水下目标,满足多载体同时作业的定位需求。
国际上主流的超短基线主要有英国Sonardyne公司的Gyro USBL 水下声学定位系统,法国IXBlue公司的GAPS 型全球声学定位系统,挪威Kongs⁃berg Marinetime 公司的HiPAP 系列,英国AAE 公司的Easytrack系统系列等等。
2.4 光泵磁力仪
光泵磁力仪建立在塞曼效应基础之上,是利用拉莫尔频率与环境磁场间精确的比例关系来测量磁场的。T=K×f,这里f是拉莫尔频率;K为比例系数;T是地磁场,单位为nT。只要测量拉莫尔频率f,就可以得到地磁场f的大小。光泵磁力仪灵敏度可达0.01 nT 或更高,采样率可达10 Hz或更高,主要应用于对灵敏度要求较高的海洋磁力异常调查[12]。
目前国内用于工程勘察的主流光泵磁力仪为美国GEOMETRICS 公司生产的G-880 型或G-882型铯光泵磁力仪。
3 探测工作实例
本文以2019 年底完成的湾区互联海缆(Bto⁃BE)路由勘察项目中的磁法勘察和解析过程为例,对勘察过程中的测线布设、设备选用及连接、数据分析以及交越光缆的判定成图进行具体介绍。
BtoBE 海缆是跨太平洋的海底光缆,主干线由粤港澳大湾区直达美国旧金山大湾区,是首条两个湾区之间的直达海缆,并设有分支延伸至新加坡及菲律宾等东南亚地区。主干线中S1(HKBU1)自中国香港穿过南海北部陆架、陆坡延伸至南海北部陆坡坡底BU1 连接处,长约570 km。该段路在领海内由与东亚交汇海底光缆系统(EAC)、亚太直达国际海底光缆(APG)、亚洲海底快线(ASE)、环球光缆(FLAG)等光缆的理论交越点为7个(如图6所示)。
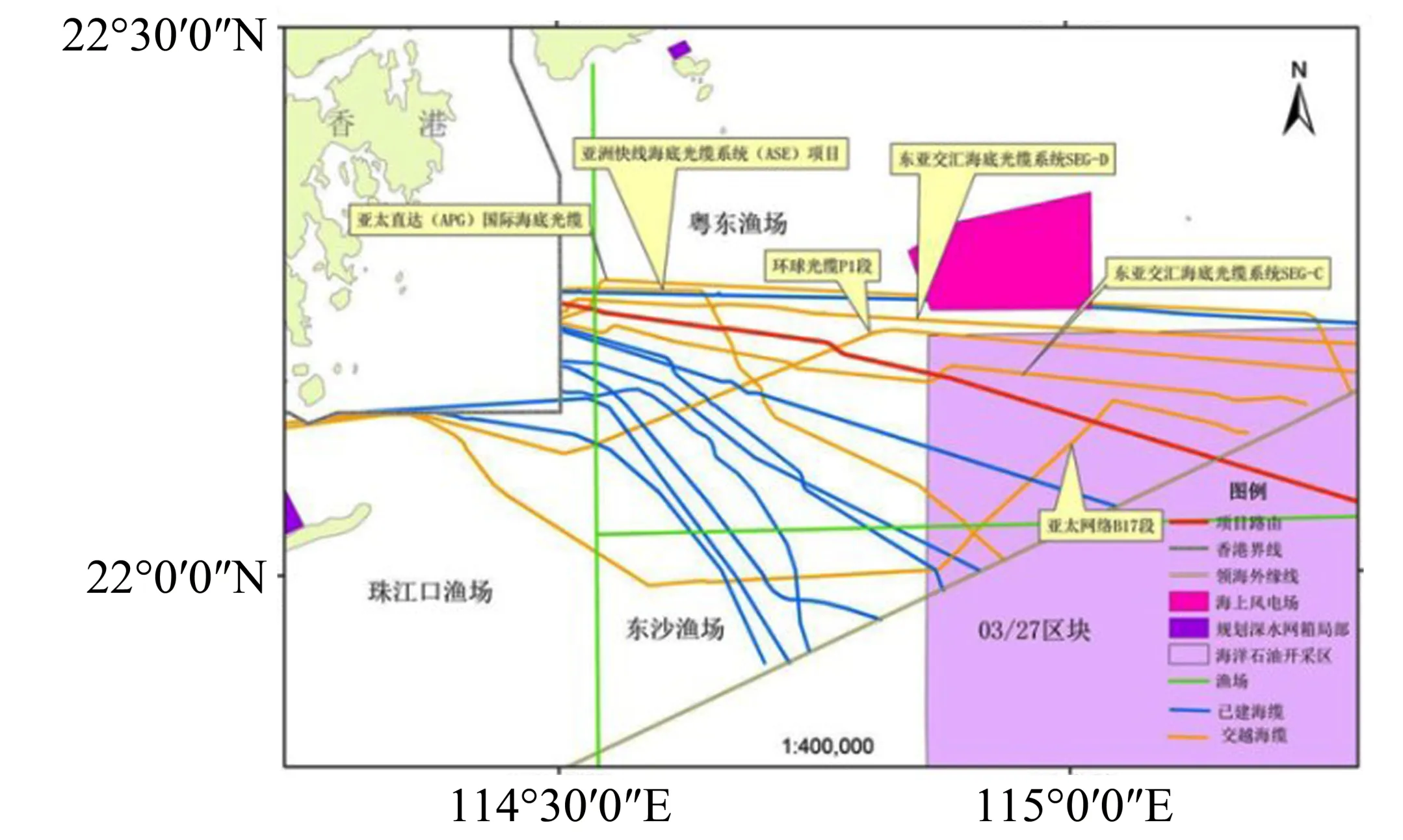
图6 BtoBE海缆领海内与已建光缆交越情况Fig.6 Intersection between BtoBE submarine cable and built optical cable
3.1 测线布设
根据收集到的已铺设光缆资料,以理论交越点为中心,半径500 m 区域内,垂直于BtoBE 光缆路由,间隔200 m 布设磁力测线,每个交越点布设5 条测线,其中最外侧的2 条测线为备用测线,测线长度为1 000 m,相邻测线走航方向相反,如图7所示。

图7 磁力调查测线分布示意图Fig.7 Magnetic survey line
3.2 探测设备及连接
为保证水下定位精度,我们采用美国C&C 公司生产的C-Nav3050 星载差分DGNSS 系统进行时差分定位,配合使用英国Sonardyne 公司生产的So⁃nardyne Ranger 2 超短基线系统对磁力仪拖鱼进行水下实时定位。其中,DGPS 系统的平面精度优于0.15 m。USBL其平面精度优于斜距的0.5%,有效作用距离1 000 m,使用时将水声换能器固定于船舷一侧并浸没海水中使之超过船底深度,水下信标用钢架固定在侧扫拖鱼上,如图8所示。

图8 水下信标及侧扫声呐Fig.8 Underwater transducer and side-scan sonar
释放同轴铠装缆连接侧扫拖鱼,缆长为2.5倍船长以消除船磁影响[13]。再使用9 m 信号缆将磁力仪拖曳于侧扫拖鱼尾部,如图9所示。侧扫拖鱼利用自身重量下沉使得磁力仪尽可能的贴近海底光缆,稳定拖鱼采集姿态及距离海底高度,提高探测信号强度。
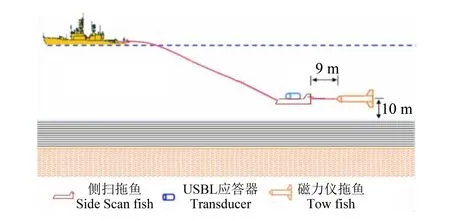
图9 设备连接示意图Fig.9 Magnetic survey equipments connection
磁力探测设备选用美国GEOMETRICS 公司生产的G-882 型铯光泵磁力仪,如图10 所示。该型磁力仪虽受测线方向和调查地区的纬度影响,但灵敏度高,在南海500 m 深度以内近岸海域探测铺设光缆的效果明显。

图10 G-882铯光泵磁力仪Fig.10 G-882 cesium optical-pumping magnetometer
3.3 采集过程
磁力仪探测时,磁力仪与水下定位系统同步作业,水下定位系统实时记录磁力拖鱼位置,保持磁力仪与海床垂直距离约在10 m,尽可能使用最缓慢测量航速,以获取精确的数据。如果有测线测得磁异常不明显,则使用调查区域最外侧的2条备用测线进行复测。采集勘察过程中使用Ma⁃gLog 采集软件采集数据(如图11),每个交越点区域设置为一个survey工程文件,每条剖面记录为一条测线,采样频率10 Hz。

图11 交越点磁异常现场采集Fig.11 Collection of magnetic anomalies at the crossover point
3.4 数据处理及交越点位置判定
3.4.1 光缆磁异常正演曲线特征为验证前述图像定位法在海底光缆磁法探测中的有效性,需要以实际铺设的海底光缆特征来构建磁性体模型,对其在直流通电状态下的磁异常值进行正演计算,以确认光缆界面在磁异常分布图像中所处位置。
以BtoBE 海缆勘察为例,对沿垂直于已铺设海底光缆的测线进行磁异常正演模拟。该海缆浅水磁异常勘测的纬度为22°N 左右,由于以近南北走向的光缆为正演模型时,A=is= 90°,正演模型可简化为

按照近岸浅水海底海缆铺设深度为3 m 的设计要求,如果磁力仪的探测高度为10 m,而光缆截面直径通常仅为0.2 ~ 0.3 m。正演结果曲线如图12所示。

图12 走向近南北的海底光缆磁异常正演模型Fig.12 Magnetic forward model of the north-south trend cable
图像近似对称,异常宽度约为100 m,幅值约25 nT,光缆位置位于异常图像几何中心,靠近正异常幅值顶点处,即坐标轴零点位置,此结果与前图5(d)海底电缆的磁异常曲线相类似。包裹层磁性材料产生的磁场强度相对于海底光缆远供电流所产生的磁场强度而言,几乎可以忽略,这也正是多数废弃光缆不易探测到的原因。
沿BtoBE 光缆S1 段路由进行侧扫作业时,我们对与路由交越的亚太2 号(APCN2)光缆S8A 段进行了实验性探测,该光缆为正南北走向,设计埋深3 m,与正演模型假设条件一致,理论交越点水深约400 m,拖鱼保持距离海底10 m的高度进行探测,交越点位置如图13所示。

图13 BtoBE海缆S1段与APCN2海缆S8A段交越点位置Fig.13 BtoBE S1 segment and APCN2 S8A segment intersection point
测线垂直于APCN2 光缆S8A 段,沿正东西向布设,经数据处理后,磁异常曲线如图14 所示,和正演模型的磁异常曲线相比较,曲线形态极为相似,异常宽度略窄,约为75 m,异常幅度高略小,约22 nT,这可能是因为APCN2 光缆供电电流强度略小,或者埋设深度略深。

图14 东西向测线异常值曲线Fig.14 Magnetic anomaly curve of EW direction line
3.4.2 数据处理过程数据处理过程包括异常值提取、磁异常滤波、磁异常平剖图绘制。因采用拖曳式磁力仪采集,需删除转弯过程中受到影响的磁力值,分析水下定位数据以及对磁力仪的航速、航向进行计算,改正9 米缆后拖[14],消除磁力仪后拖对探测定位的影响。将实测磁力值归算到磁力拖鱼位置。计算国际地磁参考场(使用igrf-13 模型)对测线进行地磁正常场校正。因每个交越点区域采集时间短,日变引起的磁场变化相对宽缓,对海底管线探测影响小[15],文中未对测线磁异常值进行日变改正。我们对校正后的测线磁异常值进行低通滤波,以消除高频抖动值。
以BtoBE与APG的交越点测线为例,编制滤波程序代码,滤波效果如图15所示。

图15 BtoBE与APG的交越点测线磁异常值滤波Fig.15 Magnetic anomaly filtered data of the BtoBE and APG crossover point
3.4.3 交越点位置判定成果以滤波后的数据为成图基础数据,采用北京金浩林公司浩拓地球物理软件平台(version 3.5)进行磁力测线平剖图绘制,坐标系选用WGS84,投影方式选用UTM 六度带,中央经度115°E。
以BtoBE与APG的交越点范围内布设的三条测线为例,经异常值提取及滤波后可见产生的磁异常变化幅度分别为28、24、26 nT(图16)。异常值幅度的变化与磁力仪距离光缆的距离有关。绘制三条测线磁异常的平面剖面图。用虚线勾勒连接磁异常突变的剖面几何中点,即可得到交越光缆APG的准确走向。

图16 BtoBE与APG光缆S6段交越点1磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.16 Magnetic sectional plan of the BtoBE and APG Section 6 intersection point 1(WGS 1984 UTM_ZONE_50N)
按此方法绘制其余6处交越点的已铺设光缆异常曲线观测平面剖面图并推断已铺设光缆的走向(图17-22)。从异常平剖图来看,每条测线磁异常剖面完整,异常宽度在50~100 m 左右。不同的交越点,异常的正负形态有所区别,这主要是因为远供系统直流电的供电方向不同。将以上7处交越点判定成果进行列表(如表1 所示),表中具体列举了7处交越点的坐标位置以及异常幅值等具体参数。

表1 交越点磁力探测判定成果列表Table1 Achievement of magnetic detected intersection point

图17 BtoBE与EAC光缆D段交越点磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.17 Magnetic sectional plan of the BtoBE and EAC Section D intersection point(WGS 1984 UTM_ZONE_50N)
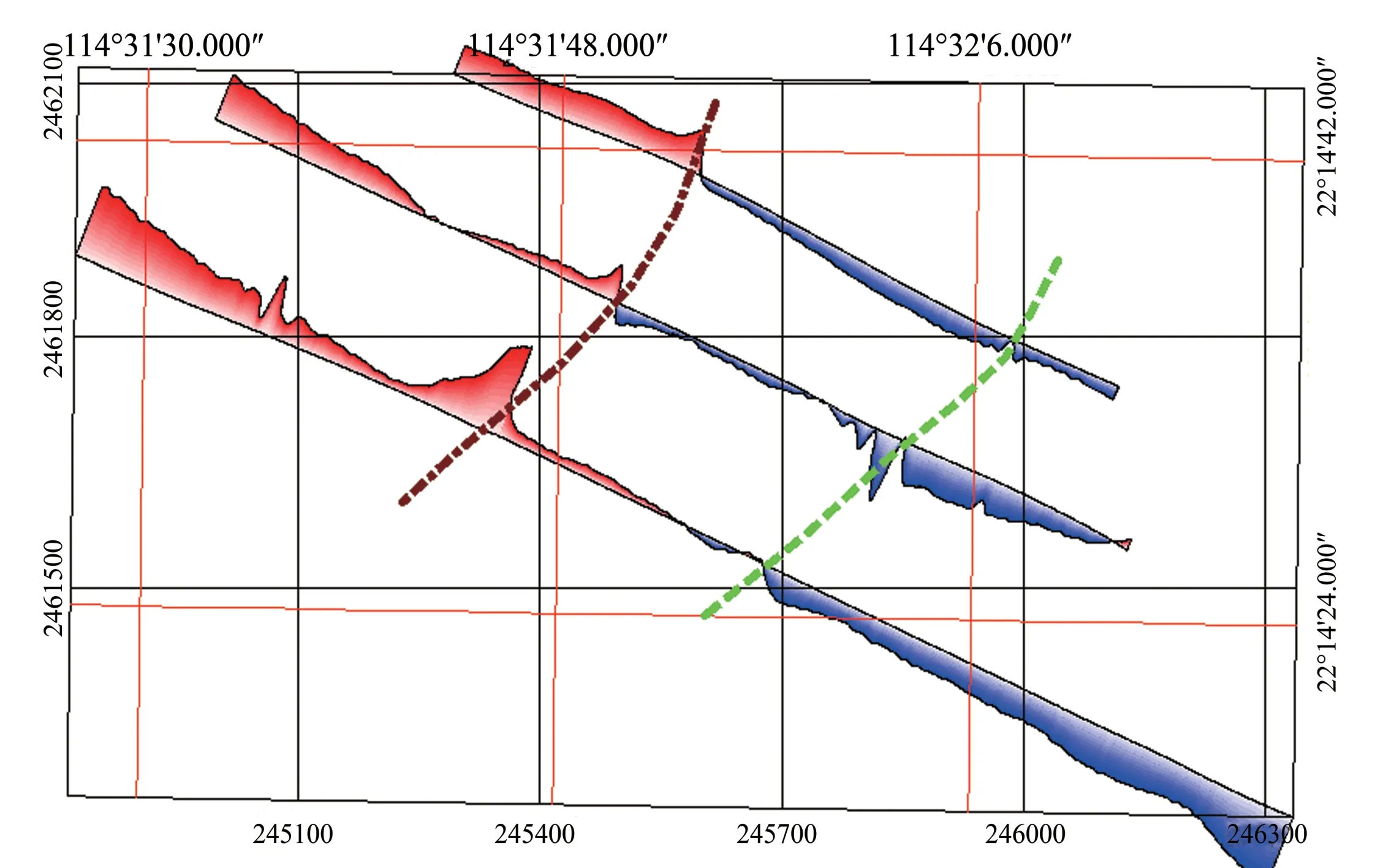
图18 BtoBE与APG光缆S6段交越点2磁力测线平剖图(绿色虚线为附近疑似电缆)(WGS 1984 UTM_ZONE_50N)Fig.18 Magnetic sectional plan of the BtoBE and APG Section 6 intersection point 2(green dotted line is suspected cable)(WGS 1984 UTM_ZONE_50N)
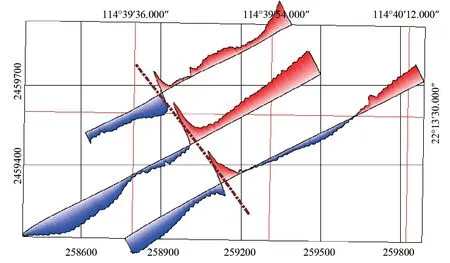
图19 BtoBE与ASE光缆S4段交越点磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.19 Magnetic sectional plan of the BtoBE and ASE Section 4 intersection point(WGS 1984 UTM_ZONE_50N)
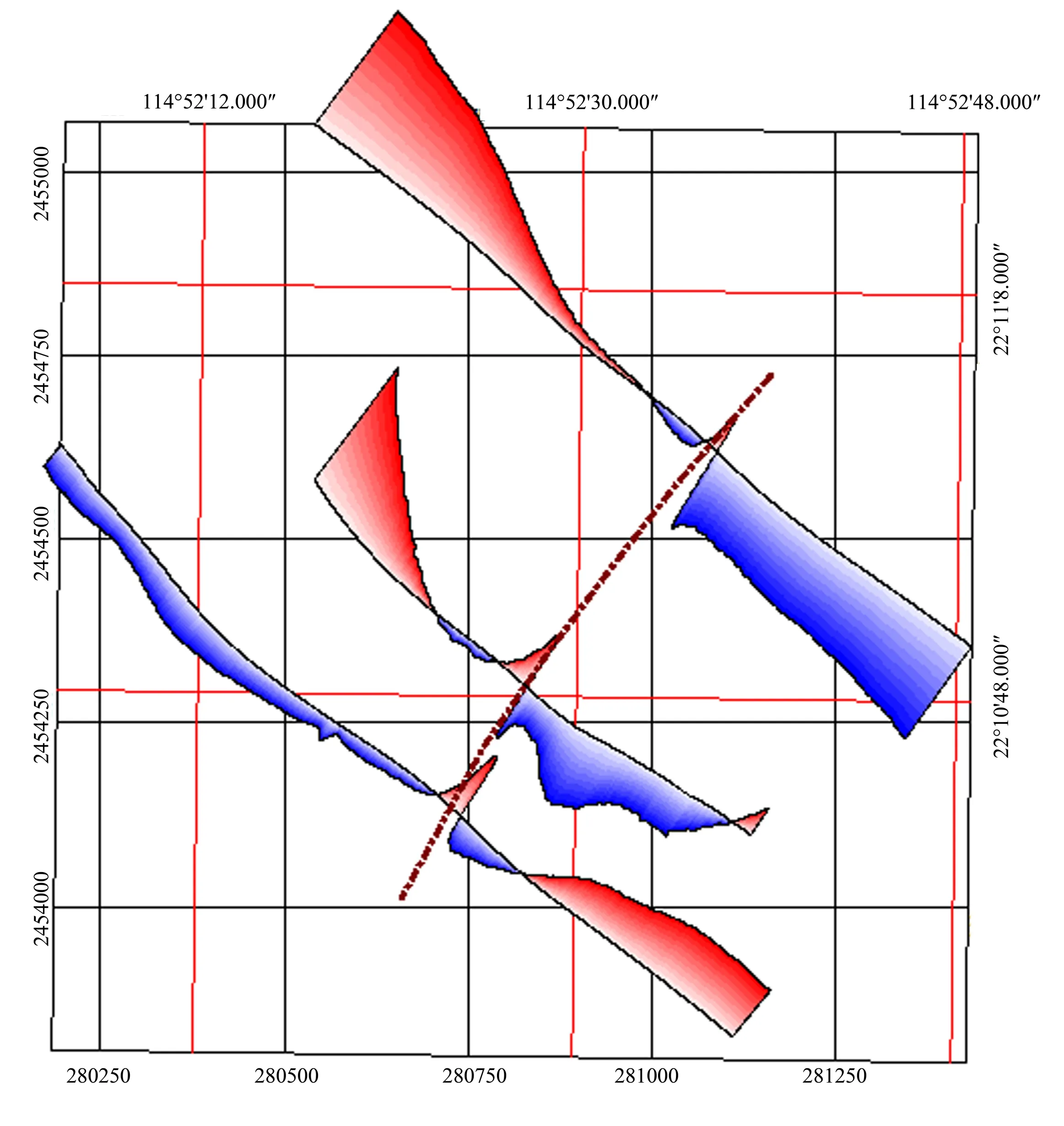
图20 BtoBE与EAC光缆C段交越点磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.20 Magnetic sectional plan of the BtoBE and EAC Section C intersection point(WGS 1984 UTM_ZONE_50N)

图21 BtoBE与FLAG光缆交越点磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.21 Magnetic sectional plan of the BtoBE and FLAG intersection point(WGS 1984 UTM_ZONE_50N)
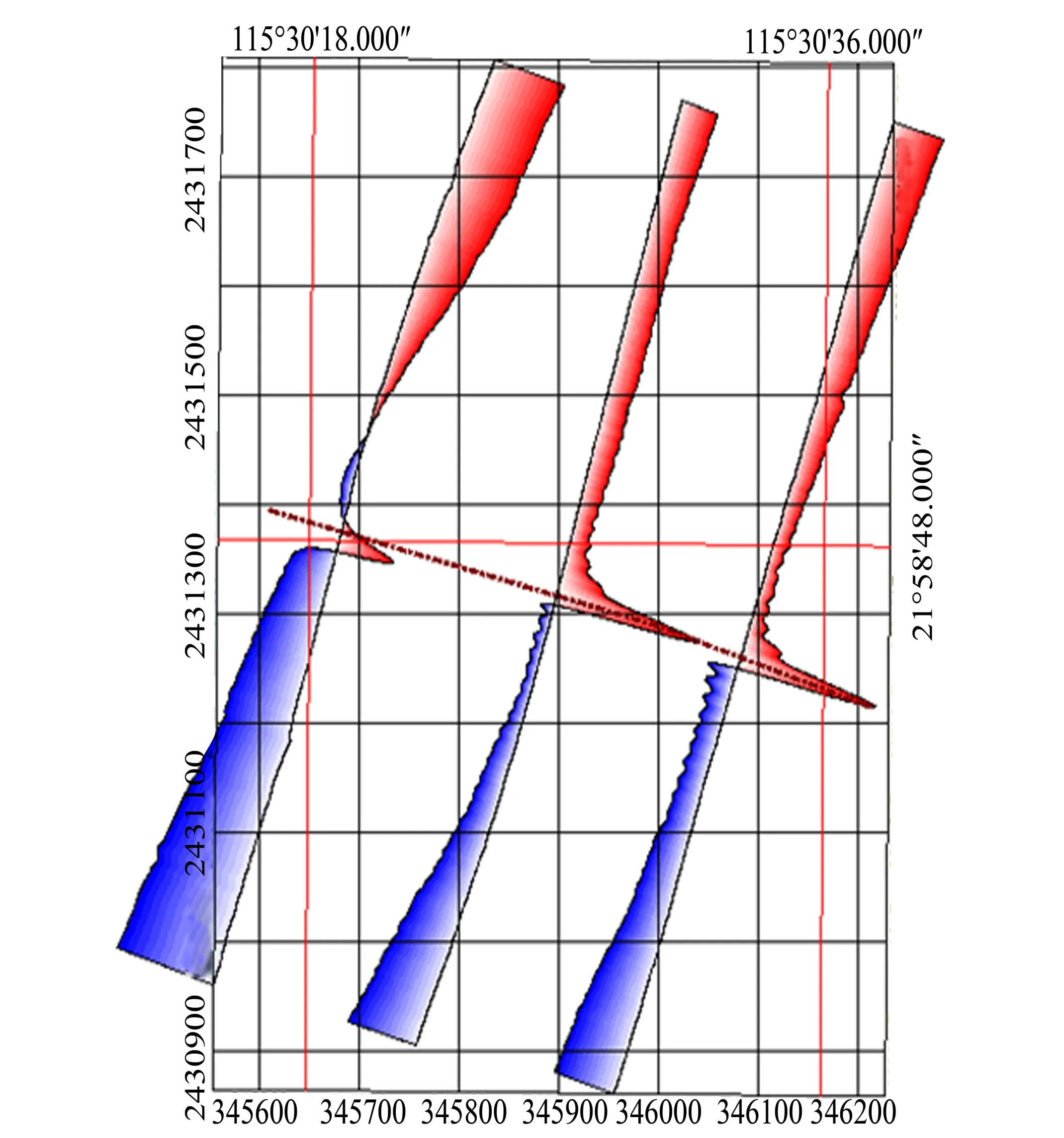
图22 BtoBE与SMW3光缆交越点磁力测线平剖图(WGS 1984 UTM_ZONE_50N)Fig.22 Magnetic sectional plan of the BtoBE and SMW3 intersection point(WGS 1984 UTM_ZONE_50N)
4 结 论
本文在介绍海底光缆结构和磁性特征的基础上,建立了海底光缆的磁异常模型,并由此计算磁异常正演曲线。选择一条南北走向海底光缆的实测磁异常曲线对正演结果加以验证。证明了海底光缆以远供系统电流产生的磁场为主,且主要与电流强度和埋设深度有关的特征。由正演曲线推导出光缆位置,具体调查中可依据已掌握的光缆特征建立正演模型,推算光缆位置与正演曲线的对应关系。在研究分析磁法探测过程中,有如下结论:
1)尽可能掌握预选路由上可能交越的已铺设电缆的历史资料是必要条件,测线垂直与电缆理论路由布设并保证测线布设密度,采集到的磁力数据至少有3 条经过已铺设光缆的高质量剖面是关键。
2)拖曳式磁力仪用于海底光缆探测时,侧扫声呐拖鱼配合磁力仪下沉,能消除船磁影响、稳定拖鱼采集姿态及距离海底高度,提高探测信号强度。
3)为消除后拖对磁法探测的影响,使用高精度星站差分GPS 以及水下定位技术,并使用水下定位数据模拟磁力仪的航速、航向,改正9 m 缆后拖误差,能大幅度提高光缆定位的准确度。
4)判定光缆位置时,可根据已知光缆大致走向,分析光缆位置与正演曲线特征的关系,结合平剖图勾勒出已铺设电缆走向,进而获取交越点坐标位置。
