某小型潜航器的声散射特性研究
2021-09-09刘博,范军,王斌
刘 博,范 军,王 斌
(上海交通大学海洋工程国家重点实验室,高新船舶与深海开发装备协同创新中心,上海 200240)
0 引 言
无人潜航器(Unmanned Underwater Vehicle,UUV)的研究工作始于20世纪50年代末,是一种以潜艇、舰船等为支援平台,能够在水下自主航行执行任务、并可以回收的智能化机器人系统。其应用范围极为广泛,民用军用领域均有极大的应用需求及应用前景,正成为世界各国竞相研究开发的热点[1-2]。尺寸在两米以内、重量在50 kg以内的UUV被称为微小型无人潜航器(Mini Unmanned Underwater Vehicle, MUUV)。微小型UUV具有高精度、低功耗、多功能一体化的特点,有广阔研发前景和实用价值[3-4]。
对于UUV声散射研究是开展其隐身设计和探测的基础支撑[5-6]。目前对小目标声散射的研究方法包括目标回波的亮点模型方法[7]、板块元方法[8]、图形声学方法[9]、有限元方法[10]、水下目标回声层析成像方法。有限元方法是求解偏微分方程边值问题的数值方法,具有计算精度高,适应各种复杂形状的特点,可以用于计算小型目标低频的声散射问题。板块元法原理是用一组平面板块对研究目标的三维几何表面进行空间近似划分,具有运算速度快、精度的高特点,适用于中高频的数值方法,常被用于进行工程中的目标强度预报。本文将板块元方法应用于研究某小型潜航器目标的回声特性。分析了入射平面波频率和入射方位角对声目标强度空间分布和频率响应特性的影响规律,讨论不同频段目标强度空间分布特性的形成机理,开展外场测量实验。通过频域间接法及回声层析成像方法分析了小型潜航器结构特点对散射的影响。
1 理论数值计算
1.1 回声特性预报的板块元方法
应用基于Kirchhoff近似所建立的近场板块元方法,进行UUV的中高频回波数值仿真。板块元方法是将目标划分为多个板块,接收总散射声场可近似为所有板块的散射声场之和。近场板块元方法可用于研究目标的近场声散射特性。当板块足够小时,针对每个小板块,发射/接收换能器可看作处在远场,从而将远场板块元推广到近场,每个小板块需满足的尺寸条件为Rmin>D2λ,其中Rmin是可以计算的最小距离,D是小板块的最大直径,λ是入射声波波长。

与通常的面元积分法相比,板块元方法的优势在于计算速度快,适用广泛,除用于远场、刚性目标的回声特性预报外,已经推广应用于近场和非刚性表面的回声特性预报[12-15]。
1.2 精灵M200 UUV几何建模
研究对象为中科探海公司的精灵 M200(Elf M200)水下无人潜航器。其具有微小型UUV的典型结构,由水上设备和水下设备组成:水上设备主要由无线数传设备和线控软件等组成;水下设备是潜航器本体。
潜航器包括:艏段、仪器舱段、载荷舱段和主推进段。艉部有四个独立控制的舵和导管桨结构,螺旋桨外围加装了导流罩。模型长约1 106 mm,主体外径为120 mm,前后桅杆位于同一水平线上,高度分别为67、85 mm,桅杆轴距艏部水平距离分别为238、726 mm。艏段椭圆壳体采用ABS材料制造,圆柱壳体采用铝合金制造。艉端有四个尾翼及螺旋桨装置,如图2所示。根据精灵M200 UUV实际尺寸及材料属性,采用COMSOL多物理场软件对其进行理论建模,示意图如图3所示。

图2 精灵M200水下无人潜航器的实物图Fig.2 Picture of Elf M200 underwater UUV

图3 精灵M200水下无人潜航器的几何建模示意图Fig.3 Geometric modeling diagram of Elf M200 UUV
模型整体大部分为金属,除尾部螺旋桨处充水外其余部分均不充水,近似为刚性,仿真时将模型看作刚性。将整个模型表面剖分成多个三角形。三角形边长小于计算频率波长的六分之一。划分网格时最大单元尺寸为0.001 5 m。
2 数值计算与分析
2.1 UUV目标回声强度随方位角变化的特征
方位角均为从艏段到艉段增加,正横方位为90°方位角。为与近场实验结果进行对比,计算目标模型的回声强度(Echo Strength, ES)。与目标强度不同的是,回声强度计算目标近场的回波特性。本文中数值计算的回声强度接收点距离目标5.6 m。首先计算回声强度随方位角变化规律,步长为0.5°。利用Savitzky-Golay法对计算数据平滑,其原理是用多项式对窗口内数据进行最小二乘拟合,本次计算窗口点数为10点,结果如图4所示。
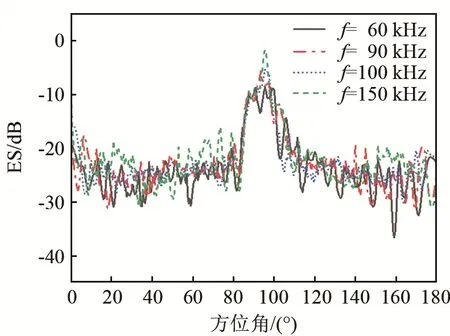
图4 回声强度随方位角、频率变化特征图Fig.4 Variation of echo intensity with incident azimuth and frequency of incident wave
经计算在频率f为60~150 kHz的正横方位,ES约为-10 dB,60~150 kHz艏部回声强度分别为-10、-16、-17、-19 dB。从特征图中可以看出,频率在 60 kHz 时正横方位与其他频率正横方位ES有较大区别,出现两个极大值,是由于此时波长接近模型目标尺寸,发生复杂散射。在其他频率时,ES在靠近正横时达到最大值,且由于模型的不对称性,最大值偏向艉部方向。艏部回声强度约为-15 dB,艉部回声强度约为-23 dB,艏段回声强度大于艉段回声强度。频率增大时,曲线起伏更加剧烈。
2.2 UUV目标回声强度正横方位随频率变化特征
由于UUV与圆柱具有相似的结构,为比较UUV结构与圆柱结构的ES的相似性,计算了在0~300 kHz范围内,该UUV目标及半径、高度相同圆柱的ES正横方位随频率变化的规律。由于实验时难以准确满足正横入射,为计算更具实用性的结果,同时计算了正横附近2.5°范围内的ES,步长为0.5°,ES计算步长为500 Hz。结果如图5所示。

图5 UUV正横方位的回声强度随频率变化特征图Fig.5 Variation of echo intensity abeam of UUVwith frequency
由图5可以看出,圆柱结构的ES曲线近似位于UUV结构ES曲线的中部,约为-10dB,当频率增大时,UUV结构ES的震荡趋势大致与圆柱结构相同,说明了UUV结构ES与圆柱结构ES的相似性。但UUV结构的ES曲线震荡更加剧烈,说明了UUV结构相比圆柱更加复杂。
2.3 UUV目标模型的频域间接方法
为进一步研究微小型UUV结构对其声散射结果的影响,采用频域间接法对UUV结构的时域回波进行仿真。将目标散射过程看作一个线性网络系统,入射信号为输入,目标回波即为输出,而目标散射表示为时域冲激响应函数或频率响应函数。时域回波可以通过频率域的稳态响应由傅里叶变换求得。首先计算得到目标散射回波的频域响应函数,将其与入射信号在频域相乘即得到目标回波的频域信号,相乘后的频域信号进行傅里叶逆变换,得到研究目标近场声散射的时域回波。
仿真中发射信号是频率范围为 10~20 kHz 调频信号,信号脉宽为1 ms,发射周期为500 ms,采样频率为1 MHz。为与实验结果对比,设接收点距目标5.6 m,根据频域间接法计算得到的回波时域结果如图6所示,方位角计算步长为0.5°。从图6中可以清晰看出UUV外壳结构对散射的影响。图6中强反射亮线为艏艉部及前后两根桅杆的回波。两个桅杆的散射回波信号与艏部回波信号时间差分别约为0.32、0.97 ms,对应的几何距离分别为240 mm、723 mm,与1.2节中模型的物理尺寸吻合良好。
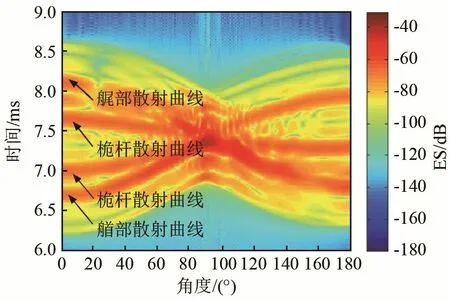
图6 利用频域间接法得到的回声强度随时间和目标方位角的分布图Fig.6 The time-azimuth distribution of echo intensity obtained by the frequency-domain indirect method
2.4 UUV目标回声层析成像方法
在频域间接法的基础上可以用水下目标回声层析成像方法对该模型进行研究。层析是通过从不同角度得到的一维投影数据来重建物体几何外形及内部结构特征的成像技术。其原理是建立水下回声信号与目标二维空间图像函数的数学关系。对于目标中心建立二维直角坐标系xOy,声波入射-反射方向与x轴的夹角为θ。在远场条件下,t时刻的回声来自于目标上距离R0+s的面元dxdy,其中,R0为发射点到目标中心的距离,s=xcosθ+ysinθ是入射矢量沿θ方向的投影距离,R0+s即为发射到目标上一点的距离。扣除与θ无关的时间延迟2R0c后,回声信号的时间(距离)由s表示。设产生目标几何亮点的外形轮廓和内部强回声结构可以用函数q(x,y)描述,回声信号的时间-角度关系可以表示为[9,16-19]:

式中:p(s,θ)是目标二维空间图像函数q(x,y)沿θ方向的一维空间投影。基于此方法计算UUV目标的声成像结果如图7所示。
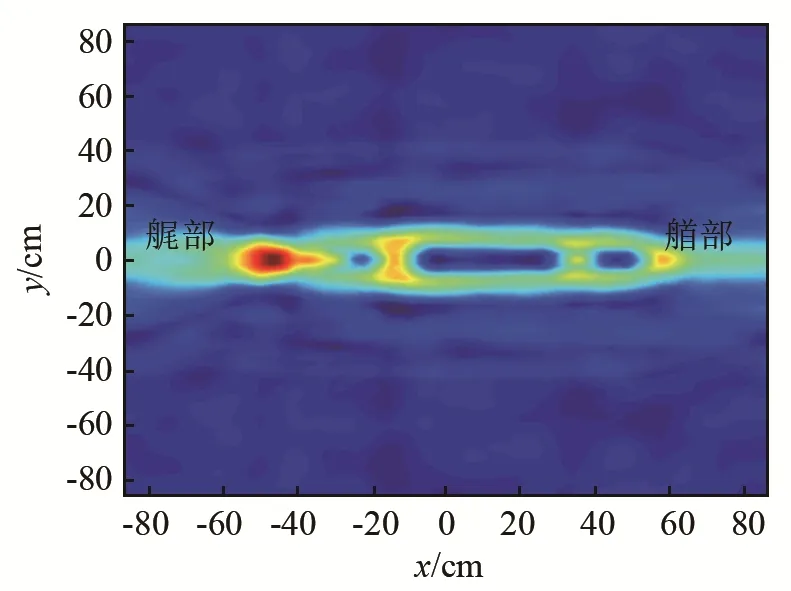
图7 根据图6所示的目标回波特性得出的声成像结果Fig.7 Acoustic imaging results obtained from the echo characteristics shown in Fig.6
从声成像结果可以得到UUV目标的外壳结构,成像结果中的尺寸与原模型尺寸相符,可以看出UUV目标的结构亮点位于艏端、艉端及前后两个桅杆附近。
3 声散射实验
为研究及验证图2中模型的时域回波特征以及验证数值计算结果,开展了模型的声散射湖上测量实验。该实验水域平均水深约为20 m,四面开阔,风浪较小,信噪比良好。通过发射频率范围为20~40 kHz、60~120 kHz的调频信号,测量图2所示潜航器水下的直达波信号以及回波信号,获取被测目标的回声强度。
3.1 实验布放
实验布放示意图如图8所示,水听器布放在模型与发射阵之间,发射阵、目标以及标准水听器吊放深度均为10 m,水听器距离发射阵4.77 m,目标距离水听器5.60 m。发射阵发射调频信号后,模型随转台水平匀速旋转,同时采集器采集水听器输出信号。
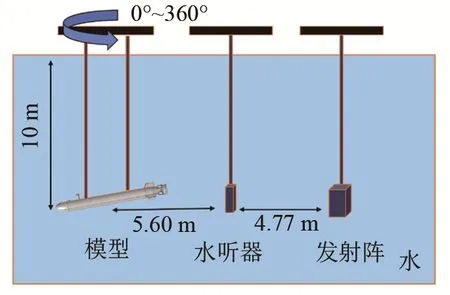
图8 实验设备布放示意图Fig.8 Layout of experimental equipment
3.2 实验数据计算结果
实验中发射调频信号脉宽为1 ms,发射周期为500 ms,采样频率为1 MHz,利用回波信号与发射信号相比的方法,计算ES随方位角变化的结果。
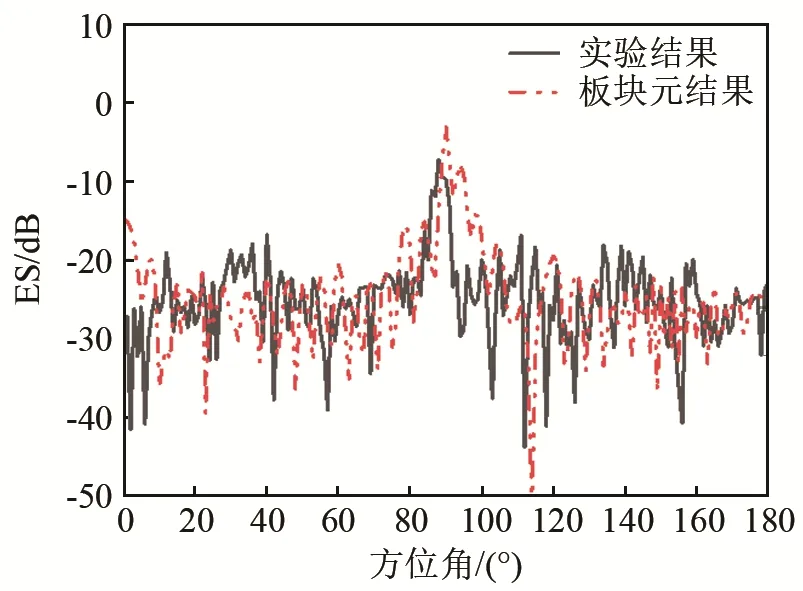
图10 回声强度随方位角的变化(f=60 kHz)Fig.10 Variation curves of echo intensity with azimuth at the frequency of 60 kHz obtained by experiment and simulation
计算时选取典型的20、60 kHz频率进行讨论。图9、10中分别为发射信号为20、60 kHz时,UUV正横方向ES随方位角的变化规律,计算步长为0.5°。可以看出实验结果与板块元结果在大部分方位角吻合较好,由于实验中难以保证准确的正横角度,导致仿真结果与实验结果在正横角度附近有偏差。在接近正横方位时,ES达到最大值,约为-5 dB,艏艉段ES较弱,实验结果在-30 dB附近。仿真中艉段的ES要略大于艏段,但在实验结果中没有很好体现。当频率变大时,除在正横附近方位角,ES曲线随方位角变化平缓。
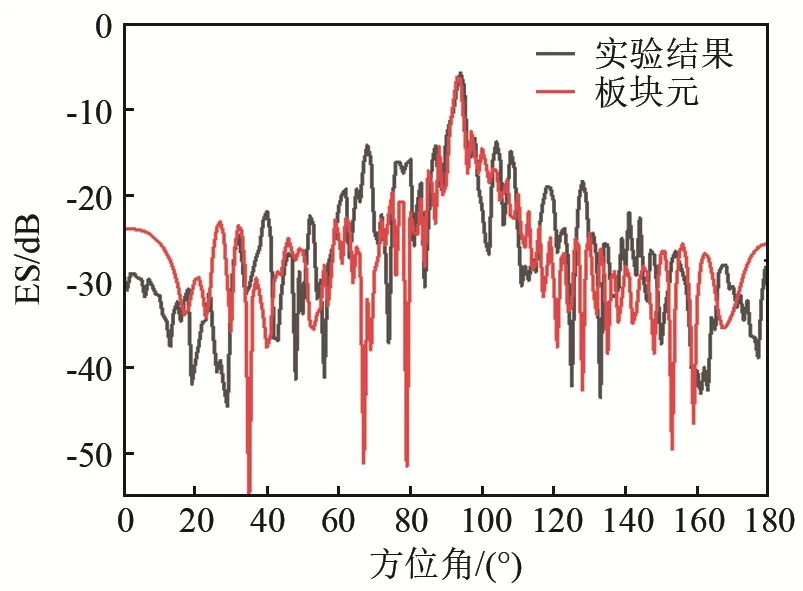
图9 回声强度随方位角的变化(f=20 kHz)Fig.9 Variation curves of echo intensity with azimuth at the frequency of 20 kHz obtained by experiment and simulation
为继续与仿真结果对比,深入研究UUV结构对散射回波的影响,验证频域间接法及层析成像方法的仿真结果,对外场实验数据处理得到UUV模型的时域结果及声成像结果。
图11中是发射信号为60~120 kHz调频信号时,UUV目标的时域声散射结果。将图6与图11进行比较,从形状和曲线的间隔时间可以看到外场试验与近场板块元仿真方法中曲线分布相近,正横两侧的亮线曲线大致是吻合的。由于仿真应用板块元法,只对模型外壳进行仿真,没有考虑到模型螺旋桨等内部结构及模型内部散射的影响,使仿真与实验结果的细节产生差异,可以看到实验结果中艏段与艉段入射方位曲线会出现分支和其他的亮线特征。根据实验的时域结果计算其层析成像结果如图12所示。
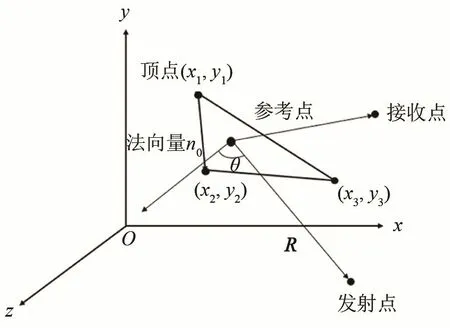
图1 板块散射示意图Fig.1 Schematic diagram of plate scattering
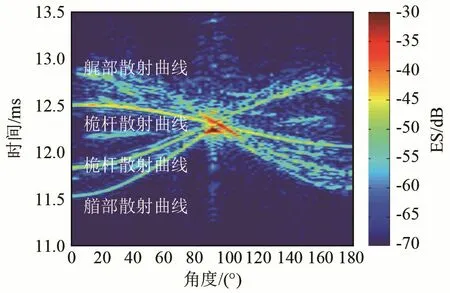
图11 实验得到的回声强度随时间和目标方位角的分布图Fig.11 The time-azimuth distribution of echo intensity obtained by the field experiment

图12 实验得出的声成像结果Fig.12 The acoustic imaging results obtained by the field experiment
对比图7与图12,可以看到实验结果与板块元结果相吻合,模型轮廓清晰可见,UUV目标的强亮点位于艏端、艉端及前后两个桅杆附近。
4 结 论
本文通过近场板块元方法数值计算了小型潜航器目标回声强度随方位角变化的特征及目标正横方位回声强度随频率变化特征。从计算结果中可以知道在距离目标5.6 m处,回声强度最大值约为-5 dB。艏部回声强度约为-20 dB,艉部回声强度约为-25 dB。通过目标信道模型的频域间接方法,仿真目标对发射信号的散射时域结果,通过回声层析成像方法得到模型的实际轮廓。结果表明UUV的艏端、艉段及前后桅杆在散射中起主要作用。仿真计算与实验结果存在误差,主要原因是在仿真中采用了完全刚性的模型,未考虑到艉段有部分进水情况。
