基于CFD模拟通道底部渠流的研究
2021-09-09陈文莉翟朝凯李万祥
陈文莉,翟朝凯,李万祥
(兰州交通大学 机电工程学院,兰州 730070)
现实生活中,渠流底部是凹凸不平的,并不类似于简单模型中那样平滑,渠流底部障碍物的研究与人们的生活息息相关[1],比如,黄河泛滥便是因为其底部泥水淤积,水流在底部迅速发生变化,进而影响河床形状,最终引发黄河改道、决堤.通过对渠流底部障碍物更加真实的仿真模拟,从而对障碍物附近的流速变化得出更加精确的数据分析[2],能够为黄河流束水归槽,防止河流溃泄决堤提供更加准确的参考依据.
通过使用STAR-CCM+软件模拟在三维通道底壁上的障碍物的稳定气流,通过模型设定、计算求解后得到了压力云图,速度云图、以及壁面剪应力图等.通过这些图的分析对比,得出三维通道底壁上的障碍物参数,为渠流工况设计与研究提供理论依据.
1 参数计算
1.1 通道模型及参数设定
在STAR-CCM+中建立通道模型几何图,图1所示参数为二维通道模型的基本参数,图2、图3为通道模型的二维及三维轮廓图.通过进行划分各个区域以及命名来进行边界条件设定,把建立好的模型分配到区域中进行计算.空气以标准压力和温度(1 bar和 293 K)进入解域,自由流速度设定为 1.17 m/s.[3-4]由于障碍物的高度为0.04 m,雷诺数为 3.115,从实验数据可以测的渠流通道入口处的湍动能和湍流耗散率分别0.024 m2/s2和0.034 3 m2/s3.
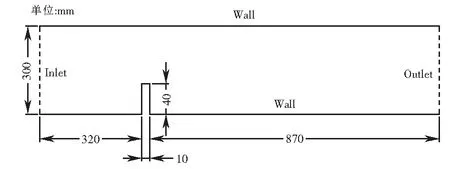
图1 通道模型的基本参数Fig.1 The basic parameters of the channel model
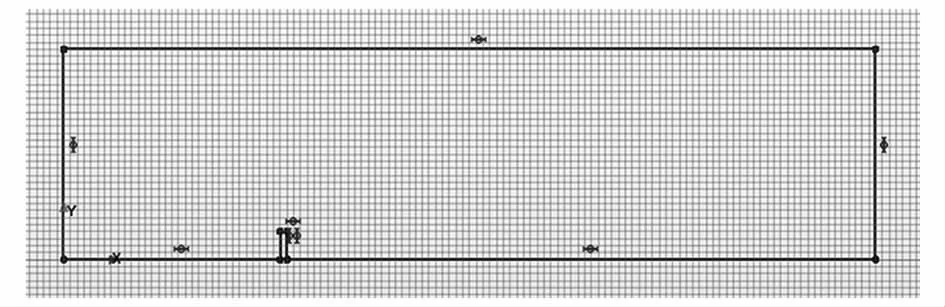
图2 通道模型的轮廓Fig.2 The outline of the channel model
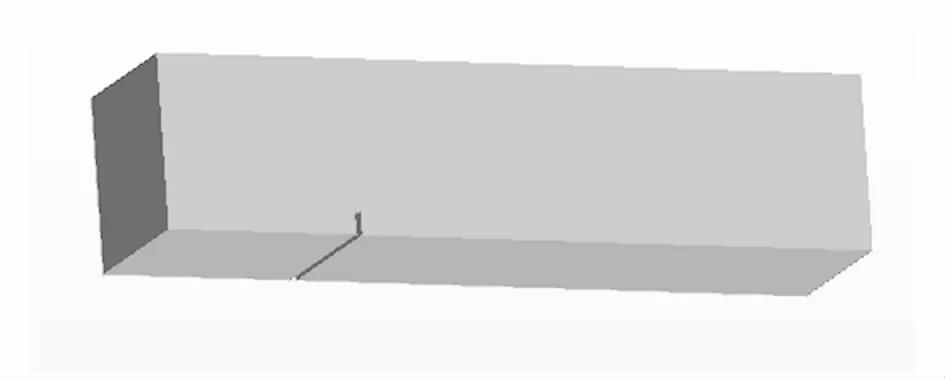
图3 通道模型的三维图Fig.3 A three-dimensional diagram of the channel model
1.2 表面离散化分析
对模型图新建表面网格划分,进行表面重构,通过设置面网格质量以及进行基础尺寸的选择,设定目标尺寸为外表面的尺寸,入口为300 mm2的正方形[5].最小表面尺寸要依据整个尺寸而设置,模型中最小值即障碍板的尺寸,障碍板尺寸为10 mm,采用20个网格捕捉,即每个网格为1 m的0.05%,面网格增长率为1.2,面网格如图4所示.
对模型建立加密块[6],该加密块区域尺寸可根据障碍板尺寸来确定,通过建立2个加密块来更加直接的模拟气流流动的方向.
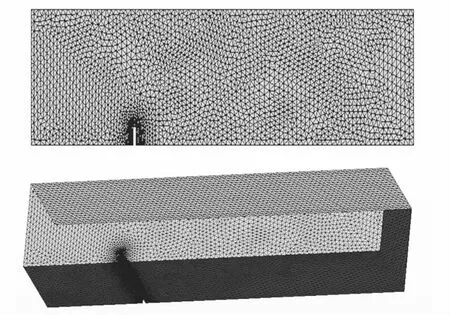
图4 离散化分析示意图Fig.4 The face mesh is divided into schematics
加密块1设置为障板前1 h,障板后13 h,障板上3 h,在Z轴方向贯穿.
加密块2设置为障板前0.5 h,障板后3.5 h,障板上2 h,在Z轴方向贯穿.(其中h为障碍板高度,等于0.04 m)其中,加密块2为最密的区域,加密块1次之.
模拟结果如图5所示.
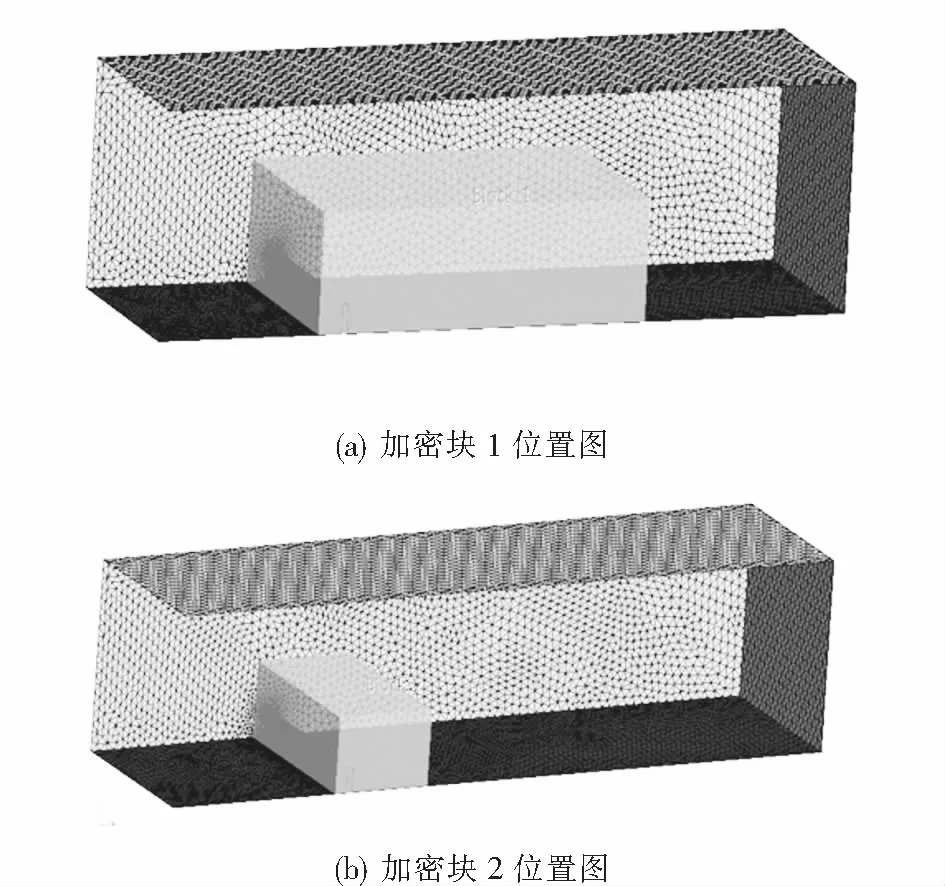
图5 加密块位置示意图Fig.5 An encrypted block location diagram
1.3 体网格加密设计
在体网格设置时,通过新建表面网格划分,选择表面重构以及需要的体网格生成器[7],以切割体网格单元生成器进行论述,体网格增长率选用中等,设定体网格的最小尺寸.根据y+=30,可以确定障板第一层网格的厚度为0.48 mm,假设拉伸6层,由于体网格拉伸率为1.2,即棱柱层总厚度为4.77 mm.同理可得,壁面第一层厚度为0.95 mm,即棱柱层总厚度为9.43 mm,设定好尺寸即可得到体网格,如图6所示.
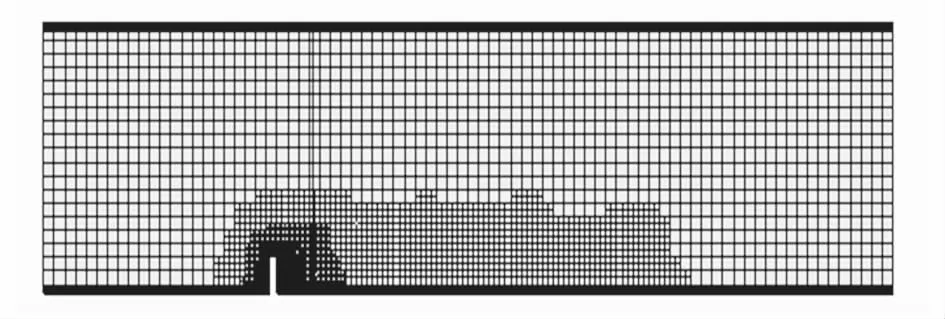
图6 体网格划分示意图Fig.6 A diagram of the body mesh division
2 三维流动模型CFD方法
三维通道底部壁上障碍物上的稳定气流的模拟,采用三维不可压缩定常湍流流动模型,湍流模型采用SST k-Omega模型[8-10].假定该流体流动是等温、湍流且不可压缩的,通过使用与Wolfstein两层模型相结合的标准线性k-Omega模型模拟湍流.物理连续体中的湍动能的初始条件是0.024 J/Kg,湍流耗散率的初始条件为0.0343 m2/s3.
2.1 三维不可压缩定常流动控制方程
三维通道底部壁上障碍物上的稳定气流的模拟是三维不可压缩定常湍流运动.依据质量守恒、动量守恒、能量守恒定律,可建立流动的控制方程[11],具体方程如下:
连续性方程
(1)
动量方程
(2)
能量方程
(3)
理想气体状态方程
p=ρRT.
(4)
式中:ui(i=1,2,3)为速度分量;p为压强;e为内能;R为摩尔气体常数;
μ为动力粘性系数.
2.2 湍流模型控制方程
目前,湍流模拟方法有雷诺时均方法、大涡模拟和直接数值模拟三种方法.雷诺时均方法是工程常用的方法[12-13].本文采用雷诺时均方法SST k-ω模型.具体数学模型如下:
湍流动能k方程
(5)
湍流比耗散率ω方程
(6)
涡粘性系数定义为:
(7)
式中:Ω为涡量的绝对值.
(8)
(9)
(10)
(11)
(12)
式中:为距离下一表面的距离,是正扩散项.
(13)
(14)
(15)
SST k-Omega模型关系方程的系数见表1[14].
2.3 定解条件
2.3.1 初始条件
在时刻,通道周围流场均静止,各处压力等于参考压力,即一个标准大气压;温度为298 K,湍流物理量也处处为零;入口流速为1.17 m/s,R=3.115,入口湍流能量为0.024 J/Kg,耗散率为0.034 3 m2/s3.即

(16)
式中:Pref=101 325 Pa为远场参考压力.
2.3.2 边界条件
通道模型的obstacle、ground、top、 rear表面为无滑移固体壁面, inlet、outlet表面为自由流边界,front为对称平面,具体见表2.

表1 SST k-Omega模型本构关系方程的系数

表2 传输变量
2.4 控制方程求解方法
本文采用基于有限体积方法的CFD软件进行三维通道底部壁上障碍物上稳定气流的数值模拟[14].使用同位网格的SIMPLE算法求解流动控制方程时,综合考虑了电脑的设置,采用Rhie-Chow类压力-速度耦合方法.代数方程组采用AMG方法求解[15].
3 网格设计
采用STAR-CCM+软件中非结构化混合网格(Trim网格和Prism网格)对三维通道计算模型进行网格划分.其中,内流场采用六面体网格(Trim网格),壁面拉伸棱柱层网格(Prism网格).网格的基础尺寸设置为0.3 m,最小相对尺寸设置为5.0%,相对目标尺寸设置为10%.在挡板附近设置两块大小不一样的加密块,第一块加密块的相对尺寸设置为1.0%,第二块加密块的相对尺寸设置为2.0%.
为了准确捕捉边界层内的流动,本节对top、rear、obstacle和ground拉伸棱柱层网格.棱柱层网格设计过程中壁面y+、拉伸比和拉伸层数的选取必须遵循3个原则:首先,必须保证壁面处理方法的有效性;其次,边界层内流场变量梯度较大,因此拉伸比不能太大;最后,保证最外层棱柱层网格与六面体网格有良好的过渡.通道模型的棱柱层网格具体设计情况如表3所示.
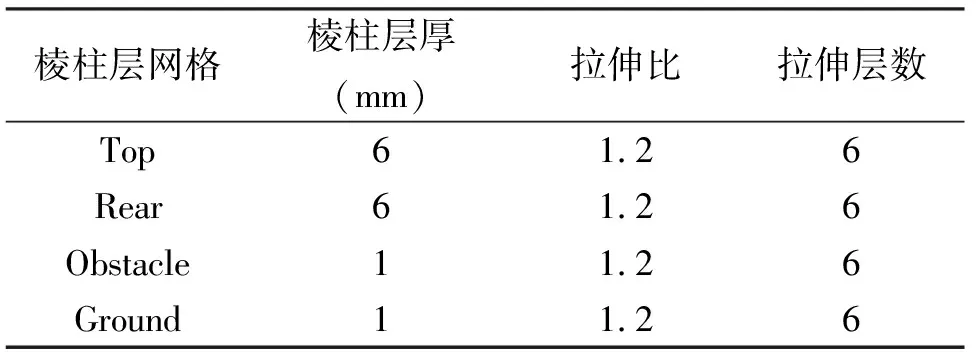
表3 棱柱层网格设计
在离散计算域时,考虑到挡板附近流场变化很大且容易形成漩涡结构,对这区域单独加密.挡板附近到计算区域远场空间,流场变化逐渐减小,因此在计算域内挡板附近到远场采用网格逐渐由密变疏、均匀过渡的网格密度控制方法,这样在保证计算精度的前提下,又能大幅度的减少网格数,降低对计算机内存的需求,从而提高计算效率,减少计算成本.图7、8分别表示了加密块设置的位置和挡板周围加密块展示效果图.
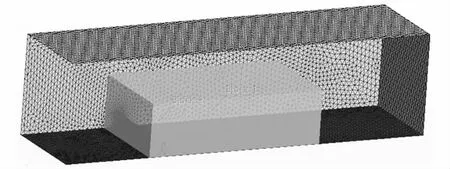
图7 加密块设置的位置Fig.7 Location of encryption block settings
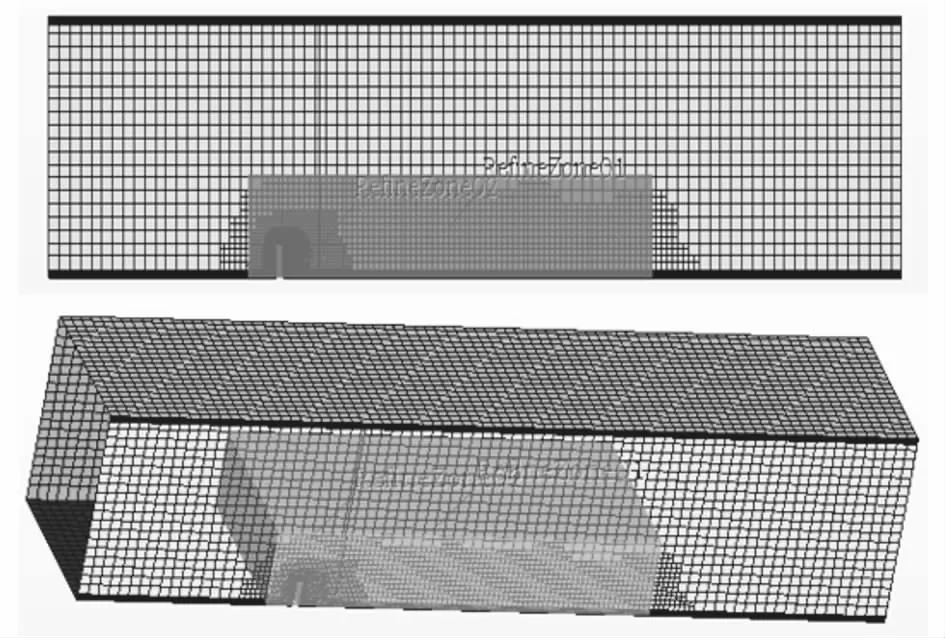
图8 加密块展示Fig.8 Encrypted block display
4 后处理
由图9可知,切割体网格单元分离器以及四面体、六面体网格分离器残差均小于0.000 5且趋于稳定,所以该通道数值求解分析是收敛的.由图10可以看出壁面y+值的分布;由图11和图12可以看出流体速度大小的分布;图13、14分别是x-y plot图.
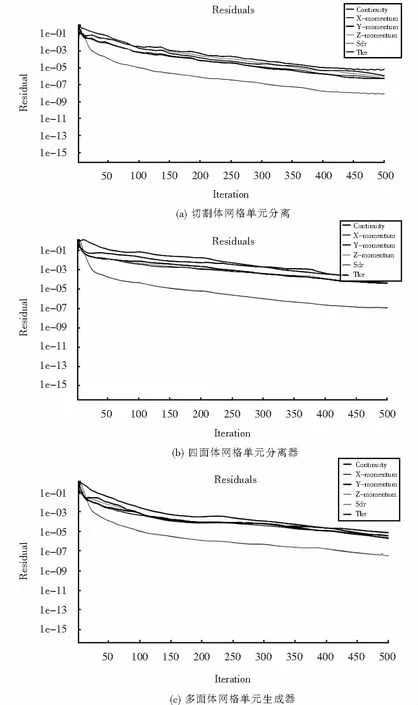
图9 各类网格分布残差图Fig.9 Various grid distribution residual maps
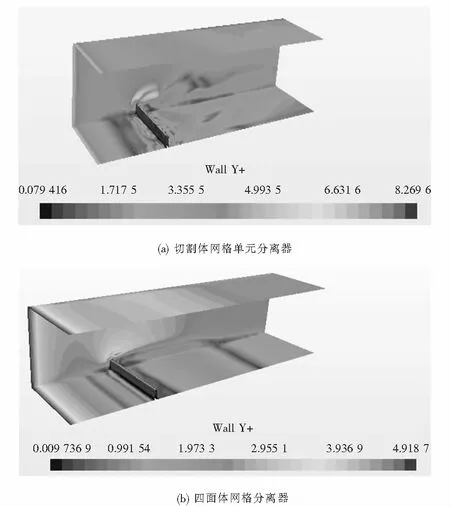
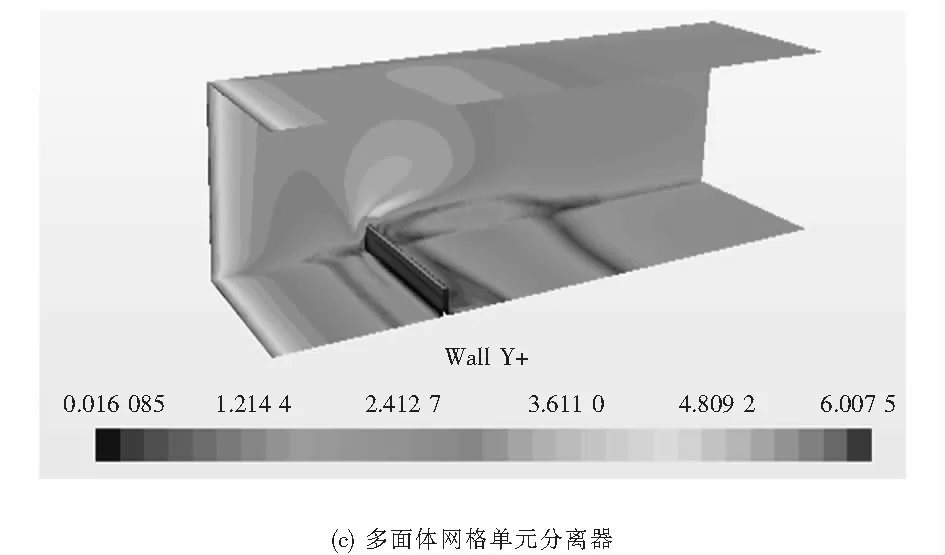
图10 壁面y+的分布Fig.10 Distribution of wall y+
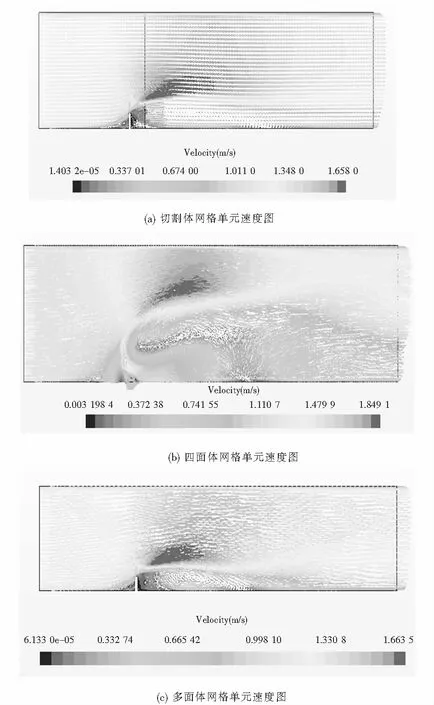
图11 流体速度大小分布Fig.11 Fluid velocity distribution
5 三种网格的对比
切割体单元网格一共484 402个,内部面142 650个,节点总共537 929个.
四面体单元网格一共2 178 858个,内部面4 576 767个,节点总共561 281个.
六面体单元网格一共570 299个,内部面3 092 038个,节点总共2 295 145个.
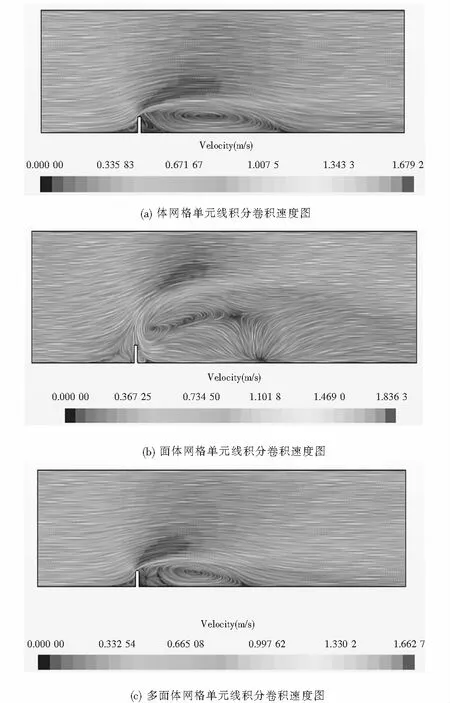
图12 流体速度大小分布卷积速度图Fig.12 Convolution velocity diagram of fluid velocity size distribution
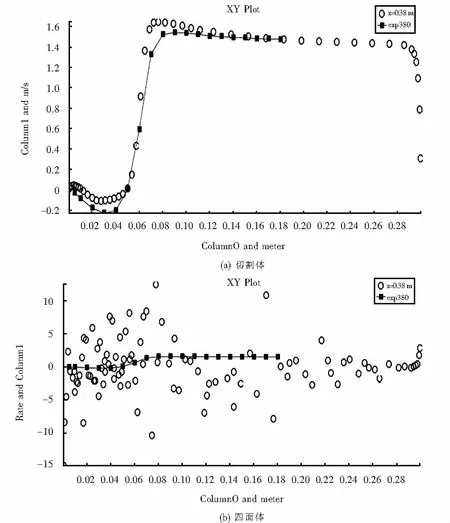
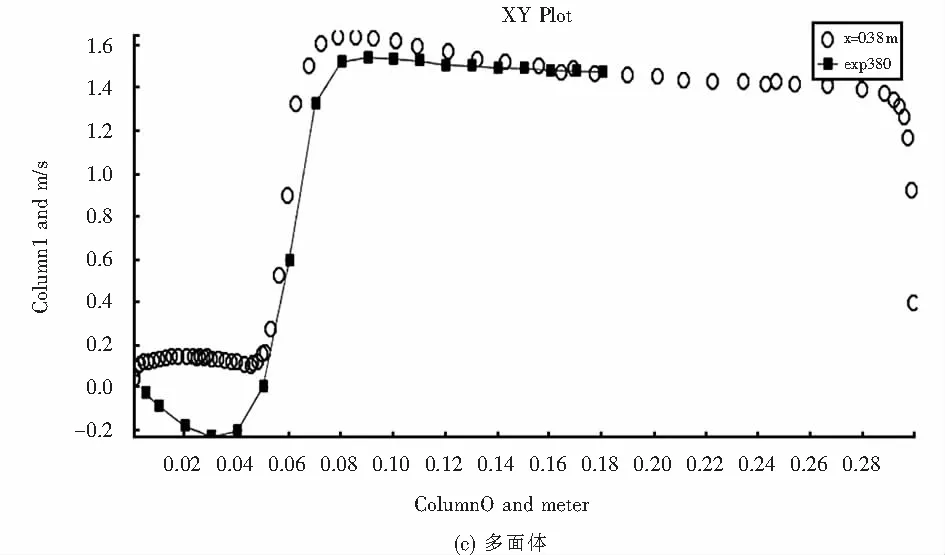
图13 x=0.38 m速度剖面Fig.13 x=0.38 m Velocityprofile
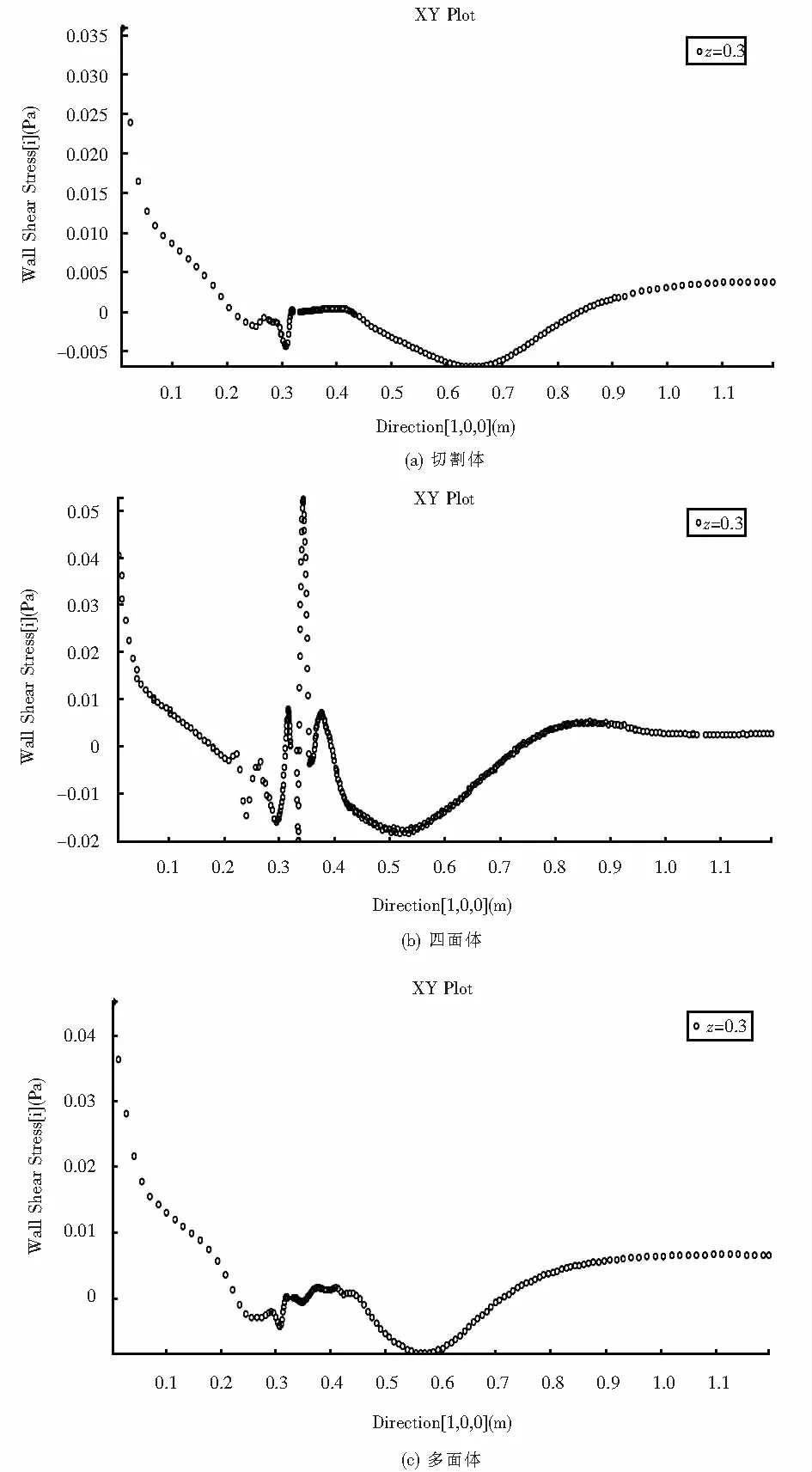
图14 壁面剪应力Fig.14 Wall shear stress
由此可以看出,四面体网格具有快速可靠的处理能力,允许复杂的几何网络具有较少的误差,但结果的准确性较低.切割体网格主要利用六面体体积与最小的偏度和对齐与流动产生最高质量的网格.六面体网格具有比四面体网格和切割体网格更高的网格精度和网格质量.
6 结语
本文通过STAR-CCM+中三种不同网格对通道底部障碍物的稳定气流进行模拟仿真分析,获得较为准确的流体域中的流体速度大小分布流线图、壁面y+分布图、单元线积分卷积速度图以及x-y plot图等等.通过这些图形的比对,可以得出三种网格有自己独特的优缺点,四面体网格划分简单,但精度不高,且网格数量大.六面体网格划分需耗费大量的时间,且对网格划分经验要求高,但网格数量较少,可节省计算时间且精度高,切割体网格主要利用六面体体积与最小的偏度和对齐与流动产生最高质量的网格.分析压力、速度、剪应力等主要参数的分布,通过建立数学模型和对实验数据的分析证明了物理模型和边界条件的有效性.因此,通过对模型进行六面体网格离散化处理,可以获得更加高的计算精度,分析结果可供工程实际检算和设计参考,能够对大型河道障碍物危害治理提供实践指导作用.
由于CFD的方法具有成本低和能模拟较复杂工况并且具有较理想的过程的优点,在给定的参数下用计算机就能进行一次数值实验,文中合理使用了CFD仿真技术进行气流模拟,分析结果能够为各类通道底部障碍物渠流工况企业以及对大型河道障碍物危害治理提供一定的指导作用.
