污染修复场地中基于显著性的目标检测方法
2021-09-08张宝峰曹珍珍朱均超
张宝峰,曹珍珍,朱均超*,刘 娜
(天津理工大学a.天津市复杂系统控制理论及应用重点实验室,b.电气电子工程学院,天津300384)
显著性检测是指人们在复杂、宏大的动态、静态场景中可以快速定位感兴趣物体、事件的能力。显著性检测的目的是经过视觉系统排除场景中冗余无用的信息,快速找出图片、视频等视觉数据中最吸引人注意的区域,减少大脑的决策负担,从而使身体对外部刺激的反应更加迅速[1]。
显著性检测的经典模型主要有以下4种:1)认知模型。对于图像,模型提取基本视觉特征:颜色(RBGY)、亮度和方向,在多种尺度下使用中央-边缘操作体现显著性度量的特征图,将这些特征图组合得到最终的显著性图后,利用生物学中的赢家取全竞争机制,得到图像中最显著的区域,它用于指导注意位置的选择,之后通过返回抑制的方式完成注意焦点的移动[2]。该模型已变成自下而上视觉注意模型的标准。然而,该模型中显著图的生成通常由不同的初级特征图在相应的合并策略下生成,有时会导致合成的显著图的大小和位置与目标存在一定的差异。2)决策论模型。从决策论的角度看,进化感知系统可以在决策论意义中产生对周围环境的最优决策。决策理论中的注意模型既能表达自下而上的注意,又能表达自上而下的注意。它已成功地应用于计算机视觉领域,如分类、视觉位置预测等,取得了很高的精度。但该模型忽略了数据间的相关性,容易发生过拟合[3]。3)图论模型。基于图论的显著性模型以眼动数据为时间序列,采用隐马尔可夫模型、动态贝叶斯网络和条件随机场等方法,它可以对复杂的注意机制进行建模,从而获得更好的预测能力。但是,当模型涉及训练和可读性时,它是高度复杂的[4]。4)频域模型。基于频域的显著性模型,形式简洁、易于实现,并在注意焦点预测和显著区域检测方面取得了很大的成功,但其生物合理性不是非常清楚。
在污染修复场地中,部分工作区域的有毒气体含量过高且环境复杂,若未佩戴高级防毒面具的工作人员误入这些危险的区域将会对工作人员的人身安全造成威胁,因此对于施工人员的实时防护在污染修复场地中是非常重要的。其中对施工人员的检测结果,是决定实时防护是否能有效进行的根本。由于现场背景通常与4个图像边界中每一个局部或全局呈现外观连通性,且前景呈外观一致。本文将采用基于流形排序的自下而上显著性检测模型,同时考虑局部信息和全局信息,综合利用图像中背景、前景的先验位置分布[5]及连通性通过流形排序方法得到最终显著图,以提高工作区域中人员检测的精准度。
1 基于流形排序的显著性检测
流形排序指利用数据(如图像)的内在流形结构进行图形标注的排序方法。经典的基于流形排序显著性检测算法[6]是将超像素分割后构建的图形,进行两阶段的流形排序算法。具体算法流程如图1所示。

图1 基于流行排序的显著性检测算法流程图Fig.1 Flow chart of significance detection algorithm based on popular sorting
1.1 图形构建
基于流形排序显著性检测的经典算法采用超像素分割的方法[7],即在图模型G中以超像素为节点E构造k-正则图。使每个节点不仅连接到其相邻节点,而且还连接到与其相邻节点共享同一超像素边界的节点。并且图中4个边界处的节点强制两两相连,构成封闭图。
两个节点之间的边权重为:

其中,ci、cj表示CIELAB颜色空间中相邻节点的超像素平均值;δ为控制边权重的常数;V为由数据集X={x1,x2,…,xn}⊂Rm×n(m为特征维数)组成的节点。
1.2 第一阶段的显著性检测
第一阶段为背景先验的流形排序算法[8],将图像各边界节点作背景种子点,利用其他节点与背景种子点的相似度排序代替显著性,由此得到第一阶段的显著图。
以图像的上边界为例。将边界上的节点设为背景种子点,其他为未被标记的节点,可以得出指示向量y。定义指示向量y=[y1,…,yn]T,当xi为种子点时yi=1,否则yi=0。
根据公式(2)可以计算出所有节点的排序向量f*(f*是N维向量,每一元素均为节点与背景种子点的相关性)。

其中,D为图的度矩阵D=diag{d11,…,dnn},参数α=1/(1+μ)实验时设为0.99;W为关联矩阵W=[wij]n×n。
将向量f*归一化至[0,1],则超像素节点i的显著性为:

其中,N为图像的节点总数;f*(i)为超像素节点i的归一化向量。
由此可以得到使用上边界先验的显著图St。同样,通过计算不同的指示向量y,可以使下、左、右边界的超像素节点作为背景种子点来计算显著图Sb、Sl、Sr。将4个得到的显著图融合,即为第一阶段显著图Sbq:

1.3 第二阶段的显著性检测
第二阶段为前景上的流形排序算法[9],先利用自适应阈值分割处理第一阶段的显著图,得出前景种子点。由此可得指示向量y,经公式(2)可计算出排序向量f*,将其归一化后再利用流形排序方法加强,即为最终的显著图Sfq:

其中,N为图像的节点总数,f*(i)为超像素节点i的归一化向量。
基于流形排序问题的模型如图2所示。

图2 基于流行排序问题的模型示意图Fig.2 Model diagram based on popular ranking problem
2 本文算法
虽然经典的基于流形排序的显著性检测方法在一些数据集上对其准确率以及运行速度进行了验证,并得到了较好的结果。但在本课题的研究背景下,最终得到的人员检测显著图由于环境的影响其结果并不是十分满意。因此,本文在经典算法的基础上进行了相应的改进。
2.1 调整权重
由于连接区域中的超像素很可能同属于前景目标或背景。在保留流形排序方法构造的正则图基础上,本文将属于同一连通区域的超像素连接起来。将公式(1)定义的边权重重新定义为

其中,Ci和Cj是CIELab颜色空间中节点i和j的连接区域取值,包含所有超级像素的平均颜色;λ是平衡系数,取值为0.50;实验时,
根据公式(6)调整边权重,使属于同一连接区域的节点之间的连接更强。与公式(1)中边缘权重的设置相比,它更容易区分,更符合人类视觉的直观感受[10]。
2.2 调整参数
经典的基于流形排序显著性检测算法在设置超像素块时,一般将图片划分为200个超像素块。通过实验,本文对效率和精度进行了综合测试,认为使用300个超像素块可以获得更精确的结果,而在时间成本方面,它与划分200个超级像素块所需的时间略有不同。
分割的超像素块愈精细,控制节点间权重强度的δ也应适当变大,补偿像素块增多引起的权重衰减。本文通过实验,将δ12=δ22设为0.20。然后根据δ2的值,找到最佳的α值为0.90。
3 实验与验证
本文的实验平台系统为Windows10,软件为Matlab R2017b Win 64版本,处理器为Intel(R)Core(TM)i5-3210M,主频为2.50 GHz,内存为4.00 GB。
本文在实验时,设置超像素的数量N=300;算法中的参数α、δ根据经验设为α=0.90,δ12=δ22=0.20;经典算法参数设置为δ2=0.10、α=0.99[11]。本文改进方法与经典算法的实验结果对比如图3。

图3 经典算法与本文算法视觉结果对比图Fig.3 Comparison of the visual results between the classical algorithm and the algorithm in this paper
3.1 数据集
显著性检测算法至今发展为两个分支,与此对应提出了两种类型的数据集。一类为显著性检测评估提供了眼动数据标注,记录人眼的注意位置及停留时长;一类为显著性检测提供像素级的显著物体精确标注,利于显著性物体的检测结果对比,代表性数据集为MSRA10、MSRA10K和ECSSD。此外,数据集DUT-OMRON,同时提供上述两种性能。由于不同数据集中所含图像数量及分辨率均有差异,因此,大多数显著性检测的结果需在多个数据集中进行测试以反映显著性检测方法的性能。针对本文对目标进行显著性检测的研究目的,选定MSRA10K、DUT-OMRON两个数据集为本文所用数据集。
3.2 评价方法
为了对实验结果进行定量对比,本文采用准确率-召回率曲线(PR曲线)、接收器操作特性曲线(ROC曲线)下的面积(AUC)、F值(F-measure)3种评价指标[12],将本文算法与经典算法在MSRA10K、DUT-OMRON两个数据集上进行对比验证。
PR曲线可以体现由阈值T把显著图V转化成的二制图M与给定标注G之间的关系,如公式(7)所示。在保证准确率P的前提下,召回率R越高则说明显著图V越准确。

与PR曲线类似,ROC也有多组点对组成,其中横坐标为假阳性率FPR、纵坐标为真阳性率TPR。

曲线假阳性率越低,真阳性率越高,则说明显著性图V越准确。本文利用ROC曲线求出其下方面积AUC。该面积越大,代表FPR越小,同时TPR越大,相比于ROC曲线,AUC更能直观的反映优劣。
F-measure只计算某个阈值T得到的PR点对,然后根据公式(9)得到的标量来衡量算法的优劣。本文在实验时设置β2=0.30来强调精度。

两种算法在MSRA10K、DUT-OMRON数据集上的对比结果如图4、图5所示。

图4 两算法在MSRA10K数据集上不同评价方法的结果Fig.4 The results of different evaluation methods of the two algorithms on MSRA10K data set
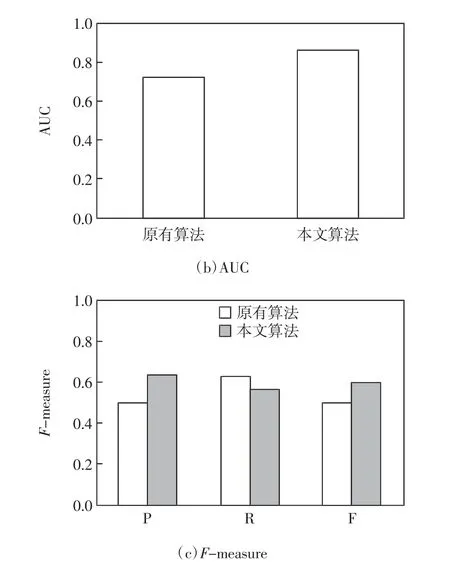
图5 两算法在DUT-OMRON数据集上不同评价方法的结果Fig.5 The results of different evaluation methods of two algorithms on DUT-OMRON data set

4 结论
本文通过对经典的基于流形排序显著性检测方法中权重以及相关参数的调整,对该算法进行了相应的改善。解决了原有算法在本文研究背景下检测结果准确度低的问题。通过对两种算法的最终显著图进行视觉对比,可以发现本文算法相较于原有算法在视觉效果上有一定的改进。同时,根据在MSRA10K、DUT-OMRON两个数据集上进行的相应评估可以得出,本文算法在准确率、召回率等方面也得到了一定的改善。