一种基于比特遍历的高动态BDS B3I信号捕获方法
2021-09-07李建武冯双记
李建武,冯双记
(华中光电技术研究所 武汉光电国家研究中心,湖北 武汉 430074)
0 引言
全球卫星导航系统(Global Navigation Satellite System,GNSS)是一种误差不随时间累积的导航定位系统,在测绘、交通运输、城市监测等领域应用广泛[1-4]。在高动态场景下,卫星信号的快速有效捕获是实现卫星接收机跟踪、定位的前提[5]。北斗卫星导航系统(Beidou Navigation Satellite System,BDS)的卫星导航电文数据率较高,且BDS D1电文存在Neumann-Hoffman(NH)码调制,使BDS接收机在对卫星信号进行捕获过程中存在频繁的电文数据比特跳变[6](简称“比特跳变”),引起相干积分检测峰值发生分裂,降低峰值对应的多普勒频率估计精度,甚至会导致检测峰值低于预设门限造成捕获失败,严重影响高动态BDS接收机的捕获性能[7]。
针对导航电文频繁比特跳变引起的捕获峰值分裂问题,文献[8]在FFT并行码相位搜索算法基础上采用了二次精频捕获方法,消除了比特跳变的影响但进行了二次捕获,增加了捕获时间。文献[9]首先对本地扩频码进行拆分和补零以剔除循环卷积内潜在的比特跳变问题,然后对分块捕获结果进行组合以重构完整的捕获结果,算法实施相对较为复杂。文献[10-11]通过并行搜索连续多组数字中频数据捕获峰值的最大值,虽规避了比特跳变对短时间相干积分的影响,但显著增加了捕获时间以及资源消耗。文献[12]采用NH码调制后的北斗信号扩频码构成一个新的扩频序列,直接对接收信号进行捕获,可规避NH导致的比特跳变问题,但该方法的FFT长度为传统方法的20倍,导致接收机运算负担急剧增加。文献[13]通过改进一种基于非对称FFT的码相位并行搜索算法,克服了比特跳变对相干积分增益的影响,但只能适用于短码信号,而对于中长码的BDS B3I信号,FFT点数的增加则几何扩大了接收机捕获逻辑的硬件资源消耗。因此,针对高动态场景下存在频繁比特跳变的BDS B3I信号,亟需研究一种简便有效、易于工程实现的快速捕获方法。
根据以上研究现状,首先理论分析了比特跳变对BDS B3I信号捕获峰值的影响机理;然后以高动态为应用背景,综合考虑捕获时间、算法复杂度以及硬件资源消耗,提出了一种基于比特遍历的PMF+FFT快速捕获方法;最后利用BDS卫星导航信号模拟器生成高动态场景下的仿真数据,验证了该方法对BDS B3I信号的适用性。
1 比特跳变对信号捕获的影响分析
为了分析比特跳变对卫星接收机捕获性能的影响,假设接收到的卫星导航信号为s(t),不考虑噪声和量化误差,则有:
s(t)=Ad(t)c(t)e-j(ω0t+θ0),
(1)
式中,t为天线接收卫星导航信号的时间;A为信号幅度;c(t),d(t)分别为伪随机码和伪随机码上调制的数据码;ω0,θ0分别为接收信号的载波频率和初始载波相位。假设卫星接收机生成的本地信号为x(t),则有:
(2)

卫星接收机中对单颗卫星信号的捕获,本质上可表示为求取s(t)和x(t)积分最大值的过程[14],则有:
(3)

(4)
假设本地码相位和接收卫星信号的码相位完全对齐,即τ为零,则式(4)可简化为:
(5)
在大多数应用场景中,接收机捕获的检测积分时间一般不会超过1个符号周期[14],在此期间只可能存在一次信息跳变,假设发生在αT(0≤α≤1)时刻,则式(5)可改为:
(6)

(7)
为了方便分析,对式(7)进行归一化处理,则有:
(8)

由图1可知,当相干积分时间内存在比特跳变时,捕获相关器输出的检测变量不仅仅是简单符号位的变化,新的变量是比特跳变位置的函数,其峰值的大小和位置都随比特跳变位置的变化而改变。因此,比特跳变导致多普勒频率估计精度降低,从而影响捕获性能。

图1 归一化的相干积分检测变量包络Fig.1 Normalized envelop of the detection variable of coherent integration algorithm
2 基于比特遍历的BDS B3I信号捕获方法
作为全球四大卫星导航系统之一,我国的BDS卫星导航系统正在高速发展,并已于2020年完成全球组网。目前,BDS B3I信号已经提供公开定位服务,并由地球静止轨道卫星(GEO)、倾斜地球同步轨道卫星(IGSO)、中圆地球轨道卫星(MEO)同步进行信号播发,BDS B3I的信号体制随其播发卫星的种类不同而存在差异。GEO卫星播发速率为500 bit/s的D2导航电文;IGSO卫星和MEO卫星播发速率为50 bit/s的D1导航电文,同时采用周期为20 ms的NH码对伪随机码进行二次调制。显然,BDS B3I的信号属性极大提高了其比特跳变率,甚至在每个扩频码周期都有可能存在比特跳变。
研究表明[8,14],比特跳变会使相关主峰值减小甚至消失,在频率轴主峰两侧出现2个边锋,频率估计误差变大,严重时将会导致转跟踪失败;在码相位轴,主峰的位置保持不变,即比特跳变不影响码相位的测量精度。在高动态场景下,BDS B3I信号频繁的比特跳变会导致卫星接收机的捕获相干积分检测峰值极易发生分裂现象[15-17]。为此,本文综合考虑捕获时间、算法复杂度、硬件资源消耗,提出了一种基于比特遍历的PMF+FFT快速捕获方法。该方法在工程实现时具体可划分为两步:
第一步,高动态BDS接收机首先读取数字中频数据与本地复制的载波进行混频处理得到零中频数据,然后将零中频数据按照2倍码速率进行累加抽取和量化处理,最后将降采样后的零中频数据与缓存的2倍码速率的本地伪码序列输入至PMF+FFT算法模块中,如图2所示。
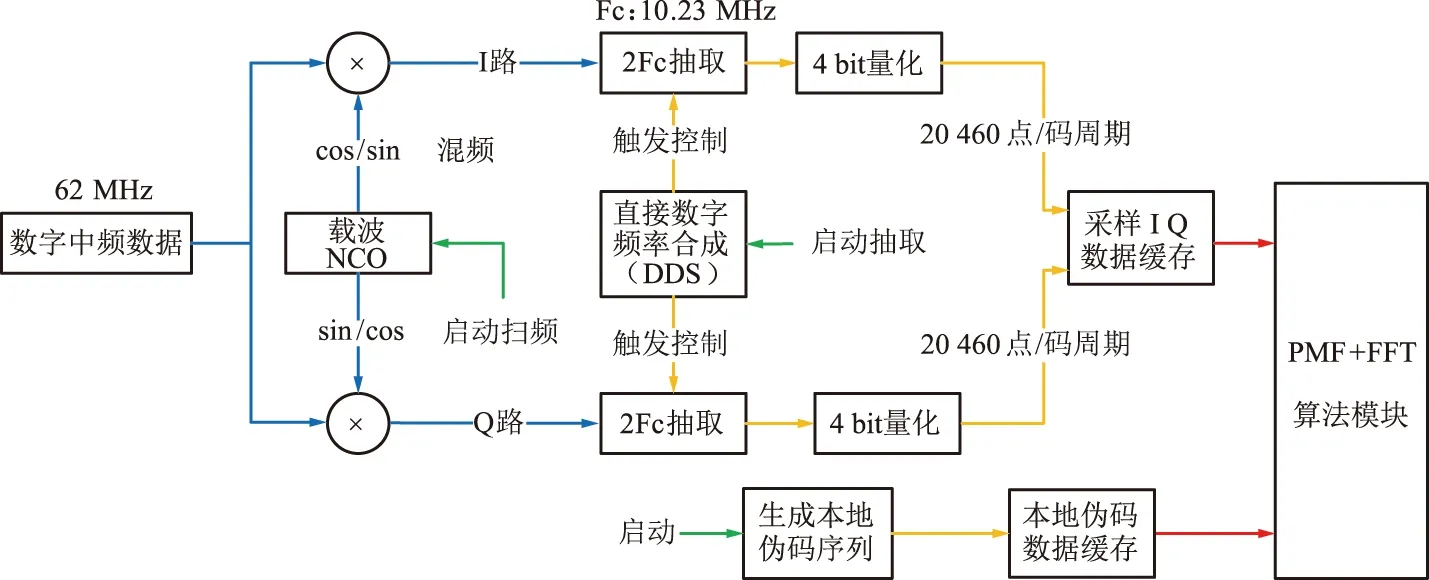
图2 高动态BDS B3I接收机的捕获逻辑框图Fig.2 Logical block diagram of acquisition in high dynamic BDS B3I receiver
第二步,在PMF+FFT算法模块中,当输入的零中频数据与本地缓存的伪码序列进行分段相关积分后,将PMF相关积分结果等分前后2段,分别与(-1,+1)和(+1,+1)相乘以进行比特遍历处理,以此抵消考虑到相关积分检测时间中间位置发生比特跳变对捕获结果造成的最恶劣的影响,具体算法流程结构如图3所示。然后将比特遍历后的2组相关积分结果分别补零进行FFT运算,并选取最大值进行捕获门限判决。

图3 基于比特遍历的PMF+FFT算法逻辑框图Fig.3 Logical block diagram of PMF+FFT acquisition algorithm based on bit traversal
在基于比特遍历的PMF+FFT快速捕获算法中,针对1个码不确定度,仅在PMF运算后等分前后2段进行比特遍历处理,可有效削弱相关积分检测时间中间位置发生比特跳变对捕获结果造成的最恶劣的影响,而在算法复杂度方面相比于传统算法只并行多做1次FFT运算。假定传统算法做一次n点FFT运算,则基于比特遍历的PMF+FFT快速捕获算法并未增加FFT运算的点数,仅需做2次n点FFT运算,所以硬件资源消耗程度增加少,易于工程实现,可适用于高动态下BDS B3I卫星接收机的快速捕获。
3 试验与分析
为了验证本文提出的基于比特遍历的PMF+FFT快速捕获算法的性能,进行了相应的高动态模拟环境仿真实验。利用GNSS信号模拟器生成的高动态场景下的BDS B3I卫星导航数据,考虑到高动态场景下的卫星信号功率不至于微弱,故仿真时设置模拟的BDS卫星信号接收功率设定恒为-130 dBm,GNSS信号模拟器的软件控制界面如图4所示。

图4 GNSS信号模拟器软件控制界面Fig.4 Software control interface of GNSS signal simulator
在利用GNSS信号模拟器进行仿真过程中,设定载体的高动态运动轨迹如表1所示。

表1 载体运动轨迹说明Tab.1 Description of dynamic trajectory of carrier
表1中,g为重力加速度,取值为9.806 65 m/s2。
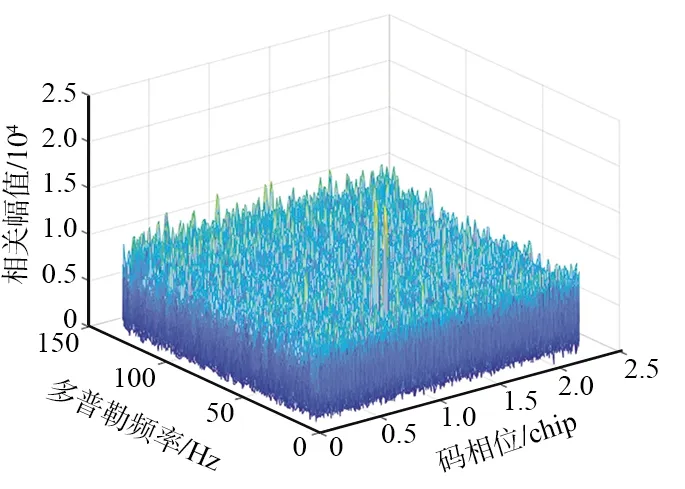
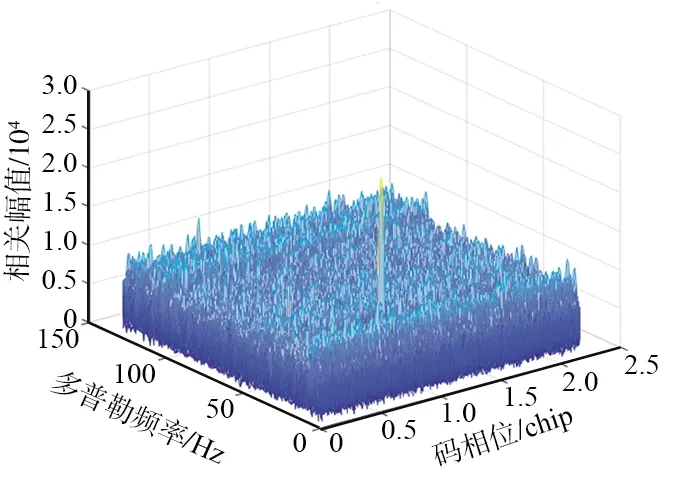
在Matlab平台上分别采用传统PMF+FFT算法和本文提出的基于比特遍历的PMF+FFT捕获算法,对采取的BDS B3I数字中频数据进行捕获处理,由于BDS D1电文调制了NH码,比特跳变现象更为明显,因此在仿真过程中设置捕获搜索的BDS卫星PRN号范围为调制了NH码的6号~10号卫星。选取了相干积分检测时间段内存在比特跳变的仿真结果记录如图5和图6所示。
(a) 多普勒频移、码相位二维搜索仿真图
(a) 多普勒频移、码相位二维搜索仿真图
由图5和图6可知,基于比特遍历的PMF+FFT算法可在一定程度上抑制相干积分检测时间段内存在比特跳变对捕获峰值的影响,保证捕获参数的有效性。对于在相干积分检测时间段内非中间区域发生的比特跳变,捕获峰值对应的多普勒频率与真实值偏差相对较小。因此,本文提出的基于比特遍历的PMF+FFT快速捕获方法可适用于高动态的BDS B3I信号,且易于工程实现。
4 结束语
捕获是卫星导航接收机实现跟踪、定位的前提,然而捕获相关积分检测时间段内的比特跳变会导致检测变量峰值分裂,在降低峰值的同时导致载波多普勒频率估计精度降低,直接影响接收机对卫星信号的捕获性能。本文以高动态场景下北斗卫星导航系统的B3I信号为研究对象,针对比特跳变导致的捕获峰值分裂问题,提出了一种基于比特遍历的PMF+FFT快速捕获方法,削弱了频繁比特跳变对捕获造成的恶劣影响,并且算法复杂度方面相比于传统算法仅并行多做1次FFT运算,易于工程实现,可适用于高动态的北斗B3I信号。
