基于压电叠层作动器的柔性自旋导弹振动控制
2021-09-07潘成龙荣吉利徐天富项大林
潘成龙,荣吉利,徐天富,项大林
(1.北京理工大学宇航学院,北京100081;2.兵器工业集团航空弹药研究院,哈尔滨150030;3.北京宇航系统工程研究所,北京100076)
0 引 言
随着现代技术的发展和轻质复合材料的广泛应用,具有薄壁结构的柔性自旋导弹具有明显的弹性作用。由于飞行中的柔性旋转导弹会经受许多复杂的激励,例如发动机推力和湍流边界层压力,导弹将发生弹性变形并产生弹性振动。弹性振动会导致额外的力和力矩直接影响飞行器弹体。同时,振动信号通过测量装置引入自动驾驶仪,导致气动伺服弹性问题[1]。另外,弹性变形和刚体运动会发生耦合,引起刚体耦合效应,影响柔性导弹的稳定性。自旋导弹飞行时绕其纵轴低速旋转,自旋飞行能够减小非对称因素(推力、质量等引起偏心),简化控制系统,同时自旋也会引起锥形运动,严重时影响系统稳定性。文献[3]发现刚弹耦合效应影响自旋导弹的锥形运动。因此,有效抑制结构振动对于提高柔性自旋导弹的稳定性至关重要。
当前,被动控制和主动控制是抑制柔性导弹的振动的最流行的控制策略。被动控制中主要采用陷波滤波器[4-10],根据控制系统对滤波器的要求确定其中心频率,然后利用滤波器的零点与控制对象的高频极点对消。滤波器无法控制弹性振动,只能从滤噪的角度来降低弹性振动,此外,随燃料消耗和环境变化,弹体弹性振动频率随之改变,会降低滤波效果。陷波滤波器对弹性振动控制具有一定局限性。
与被动控制相比,主动控制在复杂环境中具有良好的适应性。
柔性导弹振动主动控制主要有两种控制方案,一种是直接设计控制器,通过调节舵面来实现振动控制;另一种是在飞行器上加入执行机构,该机构提供作动力,抑制弹性振动。
文献[11]基于系统刚弹耦合模型,设计了鲁棒的控制器,忽略伺服气动弹性影响,实现姿态控制和横向振动抑制。文献[12]在此基础上,考虑伺服气动弹性,采用两自由度H∞跟踪减振控制算法,进行姿态跟踪和横向振动控制。文献[13]提出了一种PIDWNN自适应控制方法,利用小波神经网络的自学习功能,根据导弹运动响应,对PID控制器参数快速在线调整和更新,在大振动干扰时,控制器仍能够及时减弱或消除振动影响。文献[11-13]建模时采用均匀的欧拉梁理论,忽略弹性振动对刚体运动的影响,设计控制器影响控制精度。文献[14]提出了被动控制和主动控制相结合的复合控制,提出了三种姿态控制方案,并给出了三种控制方案各自的适用范围,但没有考虑外界干扰和参数摄动等不确定性因素的影响。考虑不确定因素后,文献[15]提出一种基于非线性干扰观测器的自适应反演控制算法,根据弹体振动的强度动态调整控制器增益,提高不同情况下的控制性能,保证系统的稳定性。文献[16]设计一种具有预设性能的反演滑模控制器。滑模控制的不连续性会引起系统的抖动,抖动问题影响系统性能,模糊控制作为一种智能控制方法,可以处理非线性特征和参数不确定性。文献[17]采用模糊滑模控制,设计姿态控制器。
直接设计控制器这种方法能够很好地实现姿态追踪和弹性振动控制,只是控制器比较复杂,加剧系统的复杂性,因此有学者引入执行机构来控制弹性振动,再设计组合控制器。文献[18]引入了主动控制力,并为刚性子系统设计了控制器,为弹性子系统设计了LQR控制器,组装控制器实现了跟踪性能并降低了弹性振动,只是没有提及主动控制力的来源,以及控制力的实现形式。文献[19]提出将动力吸振器应用于柔性导弹弹性振动控制方法,设计环形动力吸振器,并建立含有动力吸振器的飞行器动力学模型。不难发现动力吸振器的加入,引起动力学方程维度增加,当考虑姿态控制时,也会增加控制器设计难度。
文献[11-19]都是以非自旋导弹为对象开展研究,自旋导弹飞行时会引起俯仰和偏航通道耦合,舵机控制方式也不同于非自旋导弹,当前对自旋导弹研究主要集中在动力学建模、推力和气动弹性稳定性分析以及制导控制研究,迄今为止,对自旋导弹弹性振动控制研究尚未见到公开文献报道。
压电作动器具有重量轻、驱动力大、驱动位移小、工作频率范围宽、响应速度快等优点,并广泛用于结构振动控制中[20-23],但还没有文献将压电叠层作动器应用于柔性自旋导弹弹性振动抑制。
因此,本文提出将压电叠层作动器应用于导弹弹性振动控制方法。将导弹简化为非均匀自由-自由Timoshenko梁模型,考虑陀螺效应和推力作用,建立含有压电叠层作动器的柔性自旋导弹动力学模型,设计模糊滑模控制器,分析质量偏心作用下横向振动响应,并与无控制和PID控制进行对比。
1 含有压电叠层作动器导弹动力学建模
1.1 压电材料原理
自从压电效应被发现,压电智能材料研究迅猛发展,其广泛应用于各个领域,像汽车、航天等领域。压电效应分为正压电效应与逆压电效应,正压电效应是机械能转换成电能,当材料受到外力作用时,内部电荷移动,产生极化现象,外部出现相反电荷;外力消失,电荷也随之消失。传感器就是应用正压电效应。逆压电效应是电能转换成机械能,压电材料施加于极化方向电场中,电荷移动,材料发生变形。作动器就是应用逆压电效应。
压电作动驱动方式主要有三类:横向变形片状作动器,剪切片状作动器和压电叠层作动器。当需要控制力较小时,通常采用压电片状作动器,粘贴表面或嵌入内部;当需要控制力较大时,通常采用压电叠层作动器。压电叠层作动器结构如图1所示,压电叠层作动器由具有相同几何和物理特性的圆形压电片组成,d33是压电常数,U0是施加的电压,截面垂直方向为极化方向。

图1 压电叠层作动器结构示意图
1.2 系统动能、势能和外力功
柔性自旋导弹是一类飞行时绕自身纵轴旋转的飞行器,这里将其简化为非均匀的自由-自由Timoshenko梁模型,尾部受随动推力作用。
如图2所示,建立准弹体坐标系Oxyz和随体坐标系O′ξηζ,忽略轴向变形,系统的动能为[3]:

图2 弹体模型图
(1)
式中:uy,uz分别为梁截面y向、z向的横向位移,θy,θz分别为该截面的转角,Ω为自旋转速,A为截面面积,ρ为轴段微元质量密度,I为轴段微元截面的惯性矩,lb为梁长。
考虑剪切影响,系统的弹性势能为[3]:
(2)
式中:EI为弯曲刚度,κGA为剪切刚度,上标符号“′”表示变量对x的偏导数。
随动推力做的功[3]:
(3)
轴向力PN:
(4)

在尾部,随动推力非保守部分做的虚功[3]:
δWP=Pθz(0,t)δuy(0,t)-Pθy(0,t)δuz(0,t)
(5)
压电叠层作动器做虚功:
l0,t)-δθz(xm1,t))
(6)
式中:xm1为质心的轴向坐标。E0为压电片弹性模量,de为压电片直径,A0为压电片截面积,N0为压电片数量,Uy0和Uz0分别为控制电压。
根据逆压电效应,压电叠层作动器产生控制力,进而实现弹性振动主动控制。图3显示含有压电叠堆作动器的柔性导弹有限元模型,图中l0为压电堆的长度,h是压电堆与点O之间的距离,Fv为输出力。

图3 弹体模型图
1.3 含有压电叠层作动器导弹横向振动方程
采用有限元方法,将弹体模型沿轴向进行离散,划分为n个梁单元。采用Timoshenko梁单元对横向位移和转角插值,即:
(7)
式中:Φ和Ψ分别为位移和转角插值函数矩阵,η1和η2分别为y向和z向的广义坐标。
非保守系统Lagrange拉格朗日方程的一般形式如下:
(8)
式中:η和Q分别为广义坐标和包括非保守力在内的广义力。取η分别为η1和η2,由此得到单元的振动方程:
(9)
式中:M,ΩJ和K分别为系统的质量矩阵、质量变化引起阻尼矩阵、回转矩阵、质量变化引起回转矩阵、刚度矩阵,其中K1,KPN1,KP1和Ke分别为弹性刚度矩阵、推力保守部分得到的刚度矩阵、推力非保守部分和压电叠层作动器得到的刚度矩阵,采用平均弹轴条件[13],对弹体弹性变形进行约束。矩阵和向量中元素的具体表达式为:
K=K1-KPN1-KP1
(10)

(11)
(12)
(13)
KP1=PΦT(0)Ψ(0)
(14)
(15)
(16)
将式(9)用状态方程表达:

(17)
式中:

η=[η1,η2]T
(18)
(19)
(20)
C2=[Φ(xP),0]
(21)
(22)
(23)
(24)
2 模糊滑模控制器设计
2.1 积分滑模控制器
给定系统参考输入为r,系统的横向振动误差e表示为:
e=y-r
(25)
定义积分滑模面定义为:
(26)
式中,k1和k2分别大于零。
(27)
然后确定参数k1和k2的数值,使跟踪误差e趋近于零。
切换函数s(t)作为模糊控制器的输入,构成单输入单输出模糊系统,模糊规则形式为:

(28)
采用重心法进行反模糊化,得到控制输出:
(29)
其中,ωi为第i条规则权值。
这里将切换函数s作为模糊控制器输入,构造单输入模糊系统,采用重心法进行反模糊化,模糊控制规则如表1所示,模糊输入输出关系如图4所示。

表1 模糊控制规则

图4 模糊输入输出隶属关系
3 数值仿真及结果分析
以长径比为25的等截面细长回转梁模型作为仿真模型,整体分为5段,压电叠层作动器参数和回转梁模型参数分别如表2和表3所示。

表2 压电叠层作动器参数

表3 回转梁模型参数
由于柔性自旋导弹为轴对称结构,本部分只考虑y方向尾部横向振动。参考输入r=0,状态变量x=0。设质心偏心距e=1.5×10-4m,偏心力Fe=mbΩ2e,质心位于xm=3.7 m,对由质量偏心导致不平衡振动响应问题进行分析。
PID控制器参数分别为:kp=902,ki=460,kd=996,式(26)中参数k1和k2分别为:k1=1800,k2=2500。
3.1 不同转速作用下横向振动响应分析
根据转子动力学理论,旋转引起的陀螺效应使正进动频率和反进动频率呈现分离趋势。当旋转速度等于向前进动时,将旋转速度定义为临界速度。通过计算临界速度为103 rad·s-1,分别讨论自旋转速在90 rad·s-1、103 rad·s-1和110 rad·s-1的横向振动响应,数值结果如图5~图7和表4。
由图5(a)和图7(a)可知,模糊滑模控制和PID控制的导弹尾部振幅均小于无控制振幅,由表4可知,当Ω=90 rad·s-1时,模糊滑模控制和PID控制减振效果分别为42.7%和39.3%;当Ω=110 rad·s-1时,模糊滑模控制和PID控制减振效果分别为81.1%和50%;与PID控制相比,模糊滑模控制振动抑制效果更好。由图6(a)知,模糊滑模控制和PID控制可以有效抑制导弹共振发生,模糊滑模控制振动抑制效果更好。由图5(b)~图7(b)知模糊滑模控制的输入电压振幅大于PID控制的输入电压。

图5 Ω=90 rad·s-1横向位移响应

图6 Ω=103 rad·s-1横向位移响应

图7 Ω=110 rad·s-1横向位移响应

表4 P=0 N横向振动均方根
3.2 不同推力作用下横向振动响应分析
柔性自旋导弹飞行时受到随动推力的作用,弹体结构受轴向压力,能够降低结构刚度,改变系统的振动特性。因此,有必要分析随动推力对自旋飞导弹振动特性的影响。
当Ω=90 rad·s-1时,采用模糊滑模控制,分析不同推力对横向振动响应影响。数值仿真结果如图8和表5。由图8和表5可知,模糊滑模控制时,推力增大横向振动振幅变小,而表5中,无控和PID控制时,推力增大横向振动均方根都增大,模糊滑模控制器能够很好抑制弹性振动。
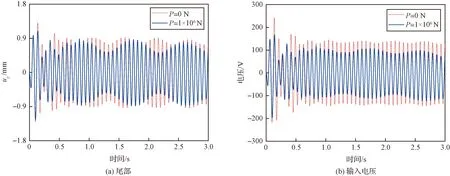
图8 不同推力作用横向位移响应

表5 Ω=90 rad·s-1横向振动均方根
4 结 论
本文基于压电逆效应,提出将压电叠层作动器应用于柔性自旋导弹弹性振动控制方法。设计了模糊滑模控制器,对质量偏心力作用下横向振动响应分析,通过与无控和PID控制对比发现:
1)PID控制和模糊滑模控制尾部横向振动振幅小于无控制时振幅,说明压电叠层作动器能够抑制弹体的弹性振动。
2)模糊滑模控制尾部横向振动振幅小于PID控制时振幅,说明模糊滑模控制优于PID控制。
3)当自旋转速等于临界转速时,无控制情况系统发生失稳,而PID控制和模糊滑模控制系统稳定,系统的稳定性提高。
