基于虚拟现实的工业机器人课程实践教学探索
2021-09-06李波田威王长瑞胡俊山李鹏程
李波 田威 王长瑞 胡俊山 李鹏程


摘 要:随着工业机器人自动装配技术成为当前我国智能制造的研究热点,工业机器人课程教学在各大高校受到越来越多的关注。然而传统工业机器人课程教学中,由于实操危险系数大、学生数量多而机器人数量少,导致学生参与度不够高、实践操作经验缺失、教学效果甚微。文章旨在将虚拟现实(VR)技术引入工业机器人课程教学中,探索虚实结合的教学新模式,实现课堂教学与工程实践相结合,打破传统工业机器人教学上的局限性,加速教学内容、课程体系、教学方法和运行机制的改革与创新,填补当前工业机器人技术实践教学方面的空白。
关键词:工业机器人;VR技术;虚实结合;航空宇航制造
中图分类号:G642 文献标志码:A 文章编号:1673-8454(2021)16-0033-04
一、引言
近年来,教育部指出要加大战略性新兴产业人才培养力度,支持和鼓励有条件的院校从高等教育入手,积极培养战略性新兴产业相关专业人才。虚拟现实(VR)技术是其中核心的战略性新兴产业,把握好VR专业建设成为学校重要工作之一。
VR技术的发展与工业机器人教学过程有着极高的契合度,可借助仪器设备等物质条件让课堂真正虚实结合,实现从感性认识到工程实践的飞跃。比如,利用VR技术可对工业机器人的装配和维修等工作进行虚拟仿真建模,在设计过程的最初阶段发现可能存在的缺陷和问题,减少不必要的浪费。又如,可通过对机器人用于飞机自动钻铆的过程进行虚拟计算与设计,使学生能够与现实的生产制造工艺相匹配。再如,运用虚拟装配技术,学生能够在更真实、自然的环境下实现大型飞机总体布置与协调,完成机器人装配过程的模拟以及维修性、测试性仿真。
本文旨在将VR技术应用于工业机器人课程的教学中,探索基于VR的工业机器人技术课程教学新模式,对课程教学的灵活性、生动性、先进性、实践性与创新性具有重要意义。利用VR技术连接工业机器人与机械制造、航空宇航制造产品的应用,实现课堂教学与工程实践相结合,学生在教室便能体验到真实环境,很大程度地节约教学成本、提升教学质量。
二、工业机器人课程教学与研究现状
工业机器人是一门高度交叉性学科,融合了力学、机械学、控制论、电子学、计算机科学等众多专业知识,理论知识抽象,与工程应用联系紧密,因而课程实践性也较强,需强调理论与实践相结合[1-3]。《工业机器人技术与应用》是南京航空航天大学机电学院针对机械制造和航空宇航制造类专业学生开设的一门专业课程,旨在培养学生学习工业机器人精度补偿技术的基本理论和方法,提高学生应用基础理论解决实际工程技术问题的能力,最终掌握工业机器人精度补偿技术及其在飞行器自动装配中的应用。
在前期教学中,笔者发现学生对机器人的基本概念不清晰,课堂参与度不够高,机器人实操经验缺失,严重影响了工程实践和创新能力的培养。主要原因如下:①传统的实验只支持重复认知型实验,无法开展工业机器人结合航空大部件制造的高探究性实验,直接影响了学生创新能力的提升;②由于飞机装配实验场地大、设备大、部件大、工艺流程复杂等因素,导致学校难以复制工业机器人装备制造现场;③真实机器人实际操作危险系数大,开展工业机器人相关教学实验存在一定的安全风险;④航空大部件制造实验需要不断升级大型专业设备和工装,消耗大量昂贵的实验材料,加之实物机器人也较为昂贵,物理实验成本极高,面对学生数量多而机器人数量少的情况,难以运用实际的机器人作为教学和培训的实验设备。
因此,探索新的教学模式已经成为工业机器人课程改革的必然趋势。电子科技大学的于楚泓[1]主要从重组教材内容和优化教学模式入手,探索了《工业机器人技术》课程的教学改革。杨利静[4]和许文燕[5]对改进后的教学方法进行了具体阐述,注重于对具体实操任务内容的改进,有助于培养学生的实际动手能力。李庆龄[6]对工业机器人课程的教学内容和教学方法均作了系统性改革尝试。杨宗凯[7]提出,教室的发展分为传统教室、多媒体教室和先进教室三个阶段,先进教室从技术演进上要经历“网络化、虚拟化、智能化”,以支持多元化的动态学习。谢斌等[8]对基于MATLAB Robotics Toolbox的机器人学仿真实验教学进行了具体的方案设计,对坐标变换、机器人建模、运动学求解、轨迹规划等机器人学知识进行仿真实验教学。袁永伟等[9]也探索了仿真软件对教学模式改革的影响,利用RobotArt软件让学生在实验室电脑上进行离线编程,考察基础理论知识的掌握情况。以上关于机器人课程教学的研究方向仍未能跳出传统多媒体教室教学的思路,教学方法依旧是课堂教学与机器人仿真软件或机器人实操相结合的传统教学模式。
三、融合VR技术的课程教学内容设计
本文以航空宇航制造工程专业的“飞机自动装配过程”為典型案例,建立基于工业机器人智能装配装备的VR教学平台,探索VR技术与工业机器人教学相结合的新模式。将工业机器人示教编程、精度补偿、轨迹规划与飞行器装配机器人自动钻铆等依赖于大型试验场地与设备的实习内容转化为教学实践课程,让学生足不出校就能切身体验到工业机器人的操作、编程方式及其在航空航天制造领域的前沿应用。本文重点致力于虚实结合的工业机器人教学平台建设、虚实结合的工业机器人课程形式创新以及虚实结合的工业机器人课程内容探索研究。
1.虚实结合的工业机器人教学平台建设
虚实结合的工业机器人教学平台建设分为“虚”与“实”两部分。“虚”部分主要依靠VR实验设备。如图1所示,以Samsung公司的玄龙和Microsoft公司的HoloLens VR设备为基础,构建起工业级5G无线局域网和光纤数据传输平台,实现多终端、低延时的数据共享,从而达到多名学生在虚拟环境中集中教学和互动实验的目的。
“实”部分依靠实验室现有不同负载的工业机器人装备(见图2),让学生在现实环境中了解机器人的结构特点,从而更好地将学生带入虚拟世界中进行飞机装配机器人钻铆实验。
2.虚实结合的工业机器人课程形式创新
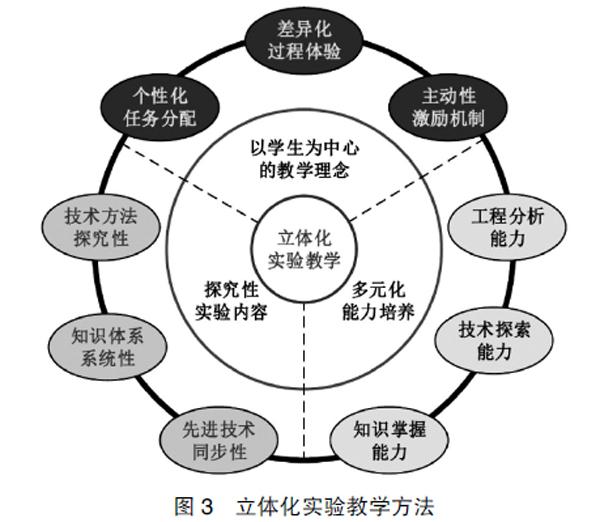
本文拟采用立体化实验教学方法(见图3),以学生为中心,注重不同学生对虚实结合教学方式接受程度的差异,对不同学生采用不同的激励方式,布置差异化实验目标,根据学生能力进行任务分组和分配。此外,在教学过程中实现多元化能力培养,以基础理论为起点,逐步带入工程化场景,实现对学生技术探索能力的培养,并在此过程中培养学生工程问题的分析能力与创新意识。课程的教学内容也将注重于基础理论、先进技术和实验操作相结合,打破传统教师讲课、学生听课的课堂形式,实现教师与学生互动教学的共同探索,创新师生平等沟通、学生互助合作的教学模式。
3.虚实结合的工业机器人课程内容探索
基于VR的工业机器人课程内容主要包括基础理论、实验教学与工程应用三个方面。基础理论方面,包括工业机器人的发展历程、机器人运动学、动力学和控制方法等,为之后的实验课程与工程应用奠定理论基础。实验教学方面,包括虚实结合实验和机器人实操实验两部分。虚实结合部分将借助虚拟现实设备,引导学生在实验室环境内对虚拟机器人进行操作,既达到了工业机器人操作教学的实验效果,又避免了误操作对学生及实验设备可能造成的伤害。机器人实操方面依赖于实验室现有的小负载工业机器人,实现学生从VR实验到实际操作实验的转化,由于在虚实结合实验中已经掌握了操作技巧,在实操环节可以大幅提高实验效率,节省大量采购工业机器人的教学成本和教学场地。在学生完全掌握工业机器人的操作技巧后,将带领学生再一次进入虚拟世界,探索工业机器人在飞机装配中的应用,以行业前沿问题为小组课题,分配给各个学生小组,从而培养学生对工程问题的分析、解决能力,全方位提高学生的综合素质。目前南京航空航天大学机电学院航空宇航智能装配课题组已经开展的工业机器人虚实结合实验场景如图4所示。
VR技术固然可使学生耳目一新,提高学习兴趣,但在教学过程中,教师合理的教学方法更是决定教学质量的重要因素。在教学过程中,教师更要意识到技术仅仅是一个提高教学质量的辅助工具,教学要做到重视技术而不依赖技术,在教学过程中循循善诱,给学生表达思想的广阔空间,鼓励并引导学生积极思考、勇于创新的风气。
四、VR技术驱动的课程教学研究方法
1.工业机器人VR教学平台建设
以VR技术为核心的工业机器人教学平台将工业机器人这一特定对象融合进VR技术中,需要建立通用的VR框架,并融合工业机器人的详细特点,形成整体平台架构。首先,建立VR框架,以Unity作为开发引擎,利用航空航天领域专业建模软件Catia建立六自由度工业机器人的产品数模,结合工业设计领域的模型优化软件工具3DMAX,将产品数模进一步优化减面,并导入Unity引擎中作为最终模型;其次,在VR框架中实现工业机器人的本身特性,建立工业机器人运动学正逆解算法,并建立机器人相应的动力学模型,将真实工业机器人的特性完全移植到VR机器人中;最后,结合教学平台具体使用场景建立相应的人机交互规则,并以学生为中心,确定具体的VR设备配置(立体眼镜、虚拟头盔等),最终实现VR沉浸环境下工业机器人与操作者的人机交互和信息流通。
2.基于VR技术的教学方法探索
以基于VR技术的工业机器人教学平台为依托,借助于VR技术的沉浸性特点,变革教学方法,探索新技术在教学、人才培养工作上的应用,整体规划基于VR技术的工业机器人教学思路与方式。首先,利用VR技术为学生提供逼近真实的虚拟场景,在虚拟场景中发挥教师的引导与指导作用,指导学生在虚拟场景中获取相关知识;其次,利用教学平台中的考核评价机制,对学生在平台中的每一步操作做出判断并给出评分,学生通过评分认识并更改错误,教师通过评分对学生的知识掌握水平做出大致判断;最后,针对远程教学需求,利用VR可远程使用的特点,为学生提供教学资源,教师通过教学平台可以实现远程指导、辅助、测试、评价等工作,为教学质量提供保障。
3.面向VR技术的教学资源信息化建设
优质的教学资源信息化建设是高校培养高质量人才的基本前提,以VR技术为核心的教学平台更加注重基础教学资源建设。首先,在现有课程的基础上,立足现状,保证未来,梳理所有涉及的实验器材与相关教学资源,保证教学资源的全覆盖与实用性;其次,利用校企联合等多方渠道,开发针对教学与实验的先进网络云存储技术,保证海量教学资源的信息化存储服务;最后,以专业要求为指导,在实际教学中以典型工作任务为主体,利用现代信息化手段,建设教学实验平台,构建“学、练、考”全方位学习与考核体系,实现教学资源的高效利用与可持续发展。
4.VR技术驱动的教学培养体系建设改革
培养方法是学生教学培养体系改革中的重要组成部分,VR技術需要以学生培养为核心,运用多种先进教学方法实现高质量人才的培养。首先,针对现有的工业机器人课程教学体系,分析现有教学模式方法的优势与不足,借助于VR技术对课程做合理性的教学模式修正,实现VR技术在课程培养中的广泛应用;其次,结合VR技术,利用计算机与传感器等相关教学资源,设置基于VR技术的工业机器人加工制造典型案例,提高教学质量;最后,根据学生在课程中的掌握程度与评价指标,综合评估教学模式的可行性与实用性,结合原有的培养体系,最终对学生培养体系做出修正,完成教学培养体系的改革。
五、结语
本文探索了基于VR技术的工业机器人课程教学新模式,设计了融合VR技术的工业机器人课程教学内容,提出了工业机器人课程教学研究方法。VR技术与工业机器人课程的深度融合,有利于培养学生的“多元化”能力,满足创新学习的需求。与传统“认知型”教学不同,采用VR技术作为教学平台,可实现学生与所学知识之间的交互,完成“以教师为中心”到“以学生为中心”的个性化教学转变,低成本、高效率地提高学生面向实际工程问题的分析能力和利用工业机器人实现产品制造的工程实践能力。
参考文献:
[1]于楚泓.《工业机器人技术》课程教学改革探索[J].科技风,2017(8):54
[2]付强,潘春鹏.《工业机器人技术及应用》课程教学改革探讨与实践[J].教育现代化,2018,5(43):90-91.
[3]黄用华,李雪梅,庄未.理工科高校《工业机器人》课程教学改革浅析[J].科技信息, 2012(21):20+23.
[4]杨利静.工业机器人课程教学探索与创新[J].教育现代化,2018,5(21):198-199+228.
[5]许文燕.智能制造背景下高职院校《工业机器人技术应用》课程改革与探索[J].南方农机,2019,50(23):166-167.
[6]李庆龄.应用型本科工业机器人课程教学改革的探索与实践[J].中国教育技术装备,2013,(21):93-95.
[7]杨宗凯.科技支撑教育创新——先进教室、数字教师、未来教育[J].中国教育信息化,2013(1):12-13.
[8]谢斌,蔡自兴.基于MATLAB Robotics Toolbox的机器人学仿真实验教学[C].全国智能科学技术课程教学研讨会,2010.
[9]袁永伟,李珊珊,孔德刚,等.虚拟仿真在“工业机器人”实践教学中的应用研究[J].教育现代化,2017,4(34):190-191.
(编辑:王晓明)
