基于改进PCNN的汽车油封尺寸检测方法
2021-09-04胡静于正林
胡静,于正林
(长春理工大学 机电工程学院,长春 130022)
以橡胶为材料的汽车油封是一种重要的精密零件,在油封生产过程中极容易形成尺寸误差而造成漏油的现象[1-2]。传统的人工尺寸检测方法不仅检测速度慢,而且由于油封固有的弹性易给人工尺寸检测精度带来很大不确定性[3-4],无法适应于当前高效快速的现代化工业生产。当前非接触、自动化的零件尺寸测量方法成为众多学者的研究方向[5-6]。吴彰良采用Otsu和形态学腐蚀算法完成了油封图像的轮廓提取,利用Hough圆变换求出圆参数,实验验证检测精度小于0.05 mm[7]。Arsalan团队设计了一种在抗环境干扰的同时实现环形零件的直径检测的检测系统,还可实现同样特征零件的计数功能,测量的准确率可达 99%[8]。谢红、廖志杰等人[9]利用CCD相机采集圆形零件图像后,对于同心圆的检测提出区域最小二乘拟合方法,经实验验证系统误差小于0.2 mm。
然而上述尺寸检测方法无法达到高精度检测要求,为更好的满足零件的高精度尺寸检测,本文以PCNN模型为基础,PCNN即脉冲耦合神经网络,在处理图像时像素灰度值相近的神经元会同时发出脉冲信号,这种特性在很大程度上减少出现边缘间断和双边缘现象的可能性,且该网络具有不需要提前学习和训练[10-11],满足系统实时在线处理要求。本文将双边滤波和Canny算子的思想与PCNN算法相结合,提出一种基于改进PCNN的汽车油封尺寸检测方法,对待测油封图像进行边缘检测以保留油封真实边缘,采用随机霍夫变换圆检测的优化算法进行圆拟合,实现汽车油封内径和外径的高精度尺寸检测。
1 基于PCNN的油封图像边缘检测算法
1.1 PCNN的基本简化模型
经典的PCNN的模型参数过多,考虑到至今没有恰当的参数设定方法且参数过多影响图像处理的实时性,因此通常都使用简化过的PCNN模型结构,如图1所示。

图1 PCNN简化模型结构图
简化的PCNN模型主要分为信号接收部分、内部调制部分和信号产生部分。接收的信号主要来自邻域内的脉冲信号和外界刺激信号的输入,也就是反馈输入F和连接输入L这两部分。PCNN应用于边缘检测时,通常将图像的灰度值作为信号初始值赋给F,当模型输出一次脉冲信号后,F需接收邻域像素神经元的输出信号和外界施加的激励信号等。而连接输入L受邻域像素神经元输出的加权和信号的F影响。
在内部调制部分存在相乘调制结构,即给连接输入L添加神经元间强度系数β后,令F与引入系数的L相乘而得到U,U为神经元的内部活动项。在脉冲信号产生部分引入了动态阈值E来调节神经元脉冲输出状态,神经元的状态是由在阶跃函数中对U和E的大小比较结果来决定的。当U>E时,神经元呈激发状态,此时阈值调节器启动放大系数VE,使E迅速增大至U≤E,结束神经元激发状态且保证不会立刻再次激发。随后动态阈值调节器使阈值E呈指数衰减,直到再一次达到U>E这个点火的条件。神经元的脉冲输出就是在动态阈值E的不断重复上述变化过程中产生的。
由于传统的PCNN神经元模型中存在大量的参数和运算,给神经元模型的分析和优化过程增添了很多麻烦,很多参数的确定不仅需要操作者的工作经验,更要依靠大量的实验进行对比分析,这样不仅工作量大而且具有很大不确定性,导致对图像处理效果不理想。故在保证PCNN模型特性的前提下,简化的数学模型公式如下所示:

式中,反馈输入Fij(n)等于图像像素的灰度值Iij;Wijxy表示像素点(i,j)与邻域像素点(x,y)之间的连接权系数;Yxy(n-1)为上一次迭代后的脉冲输出;式(3)表示内部调制中的相乘机制;式(4)表示n-1次神经元迭代输出完成后,第n次迭代中动态阈值Eij(n)受衰减系数αE的影响瞬间减小,从而调节神经元状态;式(5)表示第n次迭代中的脉冲输出,只有0或1两种状态,即当Uij(n)>Eij(n)时,神经元激发点火而输出1,反之输出0;以上系数均常设定为固定值,其中连接权系数Wijxy通常令其等于两个神经元位置的距离平方的倒数:
1.2 PCNN模型的优化
由前文分析可知,在传统PCNN简化模型中,点火时刻tfm值取决于像素灰度值Iij和连接输入Lij的耦合调制,即可说明位置相近、灰度值相近的神经元同时激活的概率与连接权系数Wijxy有很大关系。在传统PCNN模型中,Wijxy的倒数等于位置在(i,j)的神经元和(x,y)的神经元之间欧几里德距离平方。本文结合双边滤波加权系数的概念,不仅考虑到欧几里德距离对中心像素的影响,更考虑到空间域的影响。改进后的PCNN简化模型如图2所示。
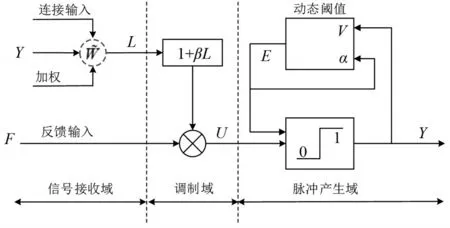
图2 PCNN模型优化图
如图2所示,改进后的连接权系数为,其表达式为:
式中,σs为空间域的尺度;σr代表像素域的尺度。该思想的引入,使得PCNN模型在对像素神经元处理时,考虑到空间域和像素域两方面。在空间域方面,连接权系数随着两个神经元距离的增加而减少,避免对图像产生“过分割”现象;众所周知在像素域方面,图像边缘处像素值大小变化明显,相对应的像素域的权重占比增大,能够增大灰度值高、低的像素点间的差异,有效保留图像真实的边缘信息,使目标像素更完整地被分割。
1.3 PCNN边缘检测算法的改进
由简化的PCNN数学表达式(4)可知,该模型中有αE、VE两个参数,本文将从神经元点火状态的角度来分析以上参数对其影响,实现网络参数的自适应。由上文可知,在其他条件一定的情况下,衰减系数αE越小,神经元的点火状态就会越提前激发,点火的周期增大,此时呈现出模型的脉冲耦合特性,模型的数学耦合性质隐藏。令油封图像中灰度值最大值和最小值分别为Imax、Imin,相对应的第二次点火时刻为tf2a、tf2b,则满足如下公式(8)的条件可使模型完全展现出脉冲耦合特性。

为了提高网络运行效率,尽可能使灰度值为Imax的神经元在tf2时刻发生点火,对神经元第二次点火进行分析。理论下第P次迭代时灰度值的神经元发生第2次点火的条件应满足以下公式:
则放大系数VE的表达式为:

综合公式(8)和公式(10),分别求出神经元Imax和神经元Imin满足点火条件的VEa和VEb:
首先,修身的关键需要体认天理,程朱理学认为天理主要在自身之外,因此要体认天理就需要到自身之外的事事物物当中,特别是圣贤书当中,去格物穷理。通过今日格一物明日格一物的日积月累,最终会对外在于自身的天理有一个豁然贯通的顿悟。

为了使模型完全展现出脉冲耦合特性,所有神经元均可发生二次点火,即VEa=VEb,即可推导出衰减系数αE:

本文将在改进PCNN的基础上,结合Canny算子在边缘检测方面的优势,实现对汽车油封真实边缘的检测。初始化改进后的PCNN网络模型,设置好模型中各个参数,自适应获取αE、VE,当油封图像中所有位置神经元都被激活后,输出边缘检测效果图。这时边缘检测后的图为二值图,标记二值图中为1的边缘点位置,采用Sobel滤波器来计算这些点在灰度图像中相对应位置像素的梯度幅值和方向,灰度值模板示意图如图3所示,I1-I9为像素点灰度值。

图3 灰度值模板示意图
运用模板依次求出x方向和y方向梯度Gx和Gy:
则梯度大小G和方向θ分别为:

使用上述公式获得油封图像边缘梯度值后,引入Canny非极大值抑制思想,即在像素点梯度方向上来比较邻域值的大小,即对于使用上述公式计算的每一点梯度方向θ,沿着梯度方向以该点为中心在其前后各取一个像素点并比较三点的幅值大小。只有中心值最大时保留该点并置1,其他情况中心值均置0,以此获得油封图像的真实边缘的像素级坐标。基于改进后的PCNN模型与非极大值抑制相结合,极大地削弱了图像过分割和欠分割的可能性,在保留油封图像真实边缘轮廓的同时仅保留轮廓的细线条,为接下来的高精度油封尺寸检测做好前期图像处理工作。改进的PCNN边缘检测算法流程图如图4所示。

图4 改进的PCNN边缘检测算法流程图
本文将油封原图像、Canny边缘检测图像、PCNN边缘检测图像以及改进PCNN边缘检测图像进行对比分析,如图5(a)-图5(d)所示。图5(a)为CCD相机采集的待测油封原图像。图5(b)所示的Canny边缘检测后呈现出相对连续且较细的边缘,但是同时出现了不需要的假边缘以及多余的干扰信息。图5(c)所示的经典PCNN边缘检测相比于Canny边缘检测算法油封边缘清晰且连续,但是将噪声点误以为边缘点检测出来,这将会给接下来的油封特征圆检测处理带来干扰。图5(d)所示的改进PCNN边缘检测弥补了PCNN边缘检测在处理油封图像时出现的上述缺陷,大大降低了噪声对边缘检测的干扰,图像边缘清晰且连续,几乎不存在边缘点漏检的情况,改进后的PCNN边缘检测效果理想,为实现汽车油封尺寸的高精度检测打下坚实基础。

图5 油封图像边缘检测对比图
2 油封内外径尺寸检测算法
在得到油封真实边缘后,对于汽车油封外圆和内孔这类典型的圆形特征,需要在此基础上进行圆拟合,以快速获取油封外圆和内孔的圆参数。
随机霍夫变换圆检测是随机选取三个不同的边缘点,由三点可以确定一个圆的概念来确定该圆的参数,该算法虽然检测过程简单,但是很容易检测到无效的圆形特征。为避免在随机选取边缘点后得到大量无效圆参数,浪费大量运算时间,本文将从随机选取三个边缘点这一方面来对算法进行优化改进,简化计算过程,提高圆检测的精度与运算速度。
随机选取三个边缘点,将三个边缘点的坐标分别设为 (x1,y1)、(x2,y2)和 (x3,y3),令候选圆的表达式为:x2+y2+2ax+2by+c=0,根据表达式求出圆的半径为。由于圆形具有特殊的几何特性,本文将结合圆的几何特性对边缘点的随机选取方法进行优化改进,从而确定圆形特征参数。

图6 优化方式一示意图



图7 优化方式二示意图
则圆的直径D=2r。经典随机霍夫变换圆检测效果图如图8所示,该算法虽然检测过程简单,但是很容易检测到无效的圆形特征,影响检测的精度。
图9为优化随机霍夫圆检测效果图,采用优化方式二选取边缘点的方法对油封图像边缘点进行随机霍夫圆检测,算法优化后没有出现无效的圆形特征,且检测后的圆形边缘非常贴近油封真实边缘轮廓,检测效果较理想,相比于经典随机霍夫变换圆检测算法提高了检测精度。
图9 优化随机霍夫圆检测效果图
3 实验结果与分析
本文利用Visual Studio 2015软件平台,将前文所述的汽车油封尺寸检测方法与相机标定实验结果相结合,完成油封内径和外径的尺寸检测,这里的相机标定采用张正友标定法,标定结果为0.016 6 mm/pixel。具体操作如下:随机选取规格为38 mm×52 mm×7 mm的10个汽车油封进行尺寸检测实验,记录尺寸检测实验结果与算法运行时间。令油封外径用D1表示,标准值为52+0.35+0.2mm,内径用D2表示,标准值为38+0.2-0.15mm。此外,为验证本文研究的尺寸检测算法的检测精度,采用尺寸检测误差小于1.5 μm的高精度三坐标测量仪对这10个油封进行外径、内径的尺寸检测。表1和表2分别记录了10个油封的外径和内径的尺寸检测结果,表3记录了油封尺寸检测的平均误差,结果显示10个油封均为合格产品,且尺寸检测结果的平均误差为0.017 6 mm,单个油封检测时间为2.17 s,足以满足现代化生产检测要求。

表3 油封尺寸检测平均误差表
4 结论
(1)本文以PCNN模型为基础,利用双边滤波的思想对PCNN模型进行改进,在改进PCNN的基础上,结合Canny算子在边缘检测方面的优势,实现对汽车油封真实边缘的检测。
(2)在得到油封真实边缘后,对于汽车油封外圆和内孔这类典型的圆形特征,采用随机霍夫圆检测的优化算法进行圆拟合,以快速获取油封外圆和内孔的直径参数。
(3)利用Visual Studio 2015软件平台,将前文所述的汽车油封尺寸检测方法与相机标定实验结果相结合,将基于改进PCNN的汽车油封尺寸检测结果与高精度三坐标测量仪检测结果相比较,检测结果的平均误差为0.017 6 mm,单个油封检测时间为2.17 s。
