智能终端与全站仪一体化立靶坐标测量方法
2021-09-03于国栋王春阳何子清徐鹏宇
于国栋,王春阳,何子清,徐鹏宇
(中国人民解放军63869部队, 吉林 白城 137001)
1 引言
目前,靶场试验中,测量立靶坐标主要采用2种方式:接触式立靶和非接触式立靶[1-2]。非接触方式受环境影响较大,弹丸捕获率一般低于98%,对于一些需要捕获率为100%的试验任务难以满足要求。所谓接触式立靶,即采用钢板或木板作为材料,制作一个垂直于地面的靶面,火炮以靶面十字丝为目标进行射击,利用皮尺或测量设备量取弹孔到靶心的平面坐标。
常用的接触式立靶测量主要有3种方法,第一,为皮尺测量;第二,为相机测量法;第三,基于串口的全站仪立靶坐标测量法。皮尺测量,对于边长大于5 m的靶面,需要将靶面放倒在地上或者用吊车将试验人员送到靶面前方,效率极低,而且受人为因素影响较大,精度较差;相机测量法,相机测量法需要畸变较小,且焦距较短的测量式相机,拍摄的照片必须为上万行像素,价格较为昂贵,加之,系统复杂,无论前期准备还是后期数据处理都比较费时。基于串口的全站仪立靶坐标测量法,必须采用有线模式,因此,限制了设备的灵活性,连接线插口来回插拔也会对设备带来一定的损耗。
随着蓝牙技术应用的普及,新一代全站仪都配备了蓝牙功能,另外,基于Android系统的智能手持终端可编程技术逐渐趋于成熟[3-8], 文章提出了一种基于Android及蓝牙技术的智能终端与全站仪一体化立靶坐标测量方法,该方法能够实现立靶坐标快速测量及试验数据可视化显示功能,采用蓝牙技术,使智能手持终端与全站仪之间实现无线远程通信,既可以克服有线连接设备在恶劣野外环境使用带来的局限性,又可以快速将存储在智能手持终端的试验数据形成报表,提高试验数据处理效率。
2 原理及数学模型
本文提出的立靶坐标测量方法仅需要一部Ts30或者更新型号的全站仪和一部基于Android系统的智能手持终端设备(手机、平板电脑、掌上电脑)便能测量出毫米级精度的立靶坐标。具体实现如下:
如图1所示,共有两个坐标系,分别为全站仪局部坐标系(xyz)和靶面局部坐标系(XYZ)。在靶面正前方或斜前方50~200 m位置处S架设全站仪,并完成整平。为了后续的计算方便,在全站仪局部坐标系下,将全站仪当前位置平面坐标设置为(0,0),高程坐标不变。分别测量靶面左下角A(x1,y1,z1)和右下角B(x2,y2,z2)的坐标,点A和点B在水平面上可以确定靶面的方向。将全站仪标定靶心O处,记录全站仪当前的方位角α0和高低角λ0。到此,准备工作已完成。

图1 测量坐标系示意图
进入正式测量阶段,将全站仪标定靶面弹孔T,记录全站仪当前的方位角α和高低角λ。
此时,已知数据为:S(0,0,z),A(x1,y1,z1),B(x2,y2,z2),L0(α0,λ0),LT(α,λ);
待求数据为:弹孔在靶面局部坐标系下的坐标(XT,YT)。
2.1 测量靶面水平坐标XT
为便于计算,需要进行平面坐标转换,如图2所示,即坐标系xoy转换成坐标系x′oy′,这两个坐标的原点一样,仅仅旋转θ角,转换关系如下:

图2 平面坐标转换后的测量坐标系示意图
(1)
因此,首先需要计算θ角,公式如下:
(2)



(3)
根据图2的几何关系,可得靶面平面坐标为
(4)
2.2 测量靶面垂直坐标YT
根据图3的几何关系,可得靶面的垂直坐标为
图3 测量坐标系侧视图
(5)
3 技术实现
3.1 硬件实现
全站仪与外接设备的通讯方式有2种,分别为:有线连接模式和无线连接模式。基于蓝牙的通讯方式属于无线连接。蓝牙连接的两端,分别为智能终端设备和全站仪。智能终端设备可选平板电脑、手机、掌上电脑任意一种。
根据任务需求,建议选择平板电脑作为智能终端设备,将其作为设备操作、数据处理和存储的技术平台,具有灵活、方便、功耗低、功能齐全和图形可视化效果好等优点。当进行连发射击打靶试验时,可以制作放样图,将所有弹孔的位置信息显示出来,对照实际靶面,避免了数据记录时,看错和写错等一些人为失误,而显示屏幕大的特点无疑会将测量结果直观的显示出来,方便操作人员及时核对。以Leica全站仪为例,其通讯协议基于GeoCOM,与智能终端设备的蓝牙连接方式如图4所示。

图4 Leica全站仪与智能终端设备的蓝牙连接方式示意图Fig.4 Schematic diagram of hardware structure
系统具体实现流程如下:
1) 在靶面正前方或斜前方50~200 m位置处架设全站仪,整平并开机。对设备进行初始化,将智能终端设备与全站仪进行蓝牙连接;
2) 坐标归零,全站仪当前位置平面坐标设置为(0,0),高程坐标不变;
3) 全站仪测量靶面两侧坐标,发送到智能终端设备;
4) 将全站仪光轴指向靶心,测量高低角和水平角并保存;
5) 智能终端设备中的程序将标定靶心处的靶面平面坐标设置为(0,0);
6) 将全站仪光轴指向弹孔,测量高低角和水平角并发送到智能终端设备中;
7) 依据第2节中的计算模型求出弹孔到靶心的靶面坐标;
8) 将结果保存在智能终端设备中,并在智能终端设备的屏幕中显示。流程如图5所示。

图5 系统流程框图
3.2 软件设计
程序设计包括2个模块,试验准备模块和正式试验模块。
试验准备模块具备设备连接、坐标归零、棱镜模式选择、靶面左侧坐标测量、靶面右侧坐标测量、靶心标定、数据清除等功能,该模块负责试验前准备工作。
正式试验模块具备靶面坐标放样图、立靶坐标测量与显示、数据显示列表等功能,该模块负责试验数据采集、存储、计算和显示。
4 精度分析
文章方法的测量精度主要受仪器本身的测量误差影响,例如全站仪的测角误差和测距误差等。市场上出售的全站仪测的角精度一般为0.5″或1″,假设全站仪到靶面的距离约为100 m,则立靶坐标的测量精度为:100*sin(1/3 600*π/180)≈0.000 5。由于距离较近,距离误差对立靶精度的影响更小。
除考虑仪器测量误差对结果产生的影响外,还需要考虑靶面因素。实际应用中发现,相对于仪器误差,靶面倾斜对测试精度的影响更大。靶面倾斜分为十字丝倾斜(左右倾斜)和靶面前后倾斜。
4.1 十字丝倾斜
十字丝倾斜即靶面左右倾斜,施工时难以保证十字丝横轴完全与地面平行,致使仪器测量结果与实际结果产生偏差。
仪器测量是基于理想十字丝,而实际上,十字丝是倾斜的,两者的差异问题本质是坐标转换的问题。如图6所示,由于原点不变,因此只要获得倾角φ,既可以获得两者的转换关系,公式如下:
(6)
通常靶面大约为10 m*10 m,因此,u和v的最大值为±5 m,当倾角φ为1°时,cosφ≈1,sinφ=3.046e-4式(6)可以简化,如下所示:

(7)
由此可得,Δu和Δv在倾角φ为1°时的最大值为0.001 5 m。
因此,实际测量时,必须要控制十字丝倾斜小于1°,或者精确获得倾角φ,然后代入式(6)进行修正。

图6 十字丝倾斜示意图
4.2 靶面前后倾斜
理想的靶面是严格垂直地面的,但是实际建靶时受多种因素影响,难以实现。以靶面前倾为例,如图7所示,ΔL+L为仪器测量的弹孔到地面的垂直距离,L′为弹孔到靶底的距离,仪器测量结果与实际结果的偏差为ΔL,倾角为ω,全站仪与射向的夹角为ψ。偏差ΔL的公式如下:

图7 靶面倾斜示意图
ΔL=L′sinωtanψ
(8)
L′的最大值为10 m,当倾角ω为1°时,cosω≈1,sinω=3.046e-4式(8)可以简化,如下所示:
ΔL=L′sinωtanψ≈L′ωtanψ≈3.046×10-3tanψ
(9)
由上式可见,受ψ的影响,偏差ΔL不能被忽视,需要修正。靶面前后倾斜只会对靶面垂直坐标YT产生影响。通常立靶试验射向趋于水平,因此,ψ≈λ,将ψ和ω(采用垂直校准设备获得)代入式(9)即可求得偏差ΔL。
5 验证
5.1 实验设计
为了验证文章方法的可行性和准确性,设计一个模拟立靶试验。模拟试验选取的设备有Ts50型全站仪和UG905型智能平板终端。Ts50型全站仪测角精度为0.5″,并且支持无棱镜测量模式,具备蓝牙功能。UG905型智能平板终端,内置Android操作系统,支持蓝牙BT4.0,8寸阳光彩屏。
在Android studio软件中,基于Java语言编写了一个立靶坐标测量的主控程序,安装在UG905型智能平板终端上,主控程序界面如图8所示。蓝色的正方形区域为靶面放样区,可见,能清楚显示测量结果。
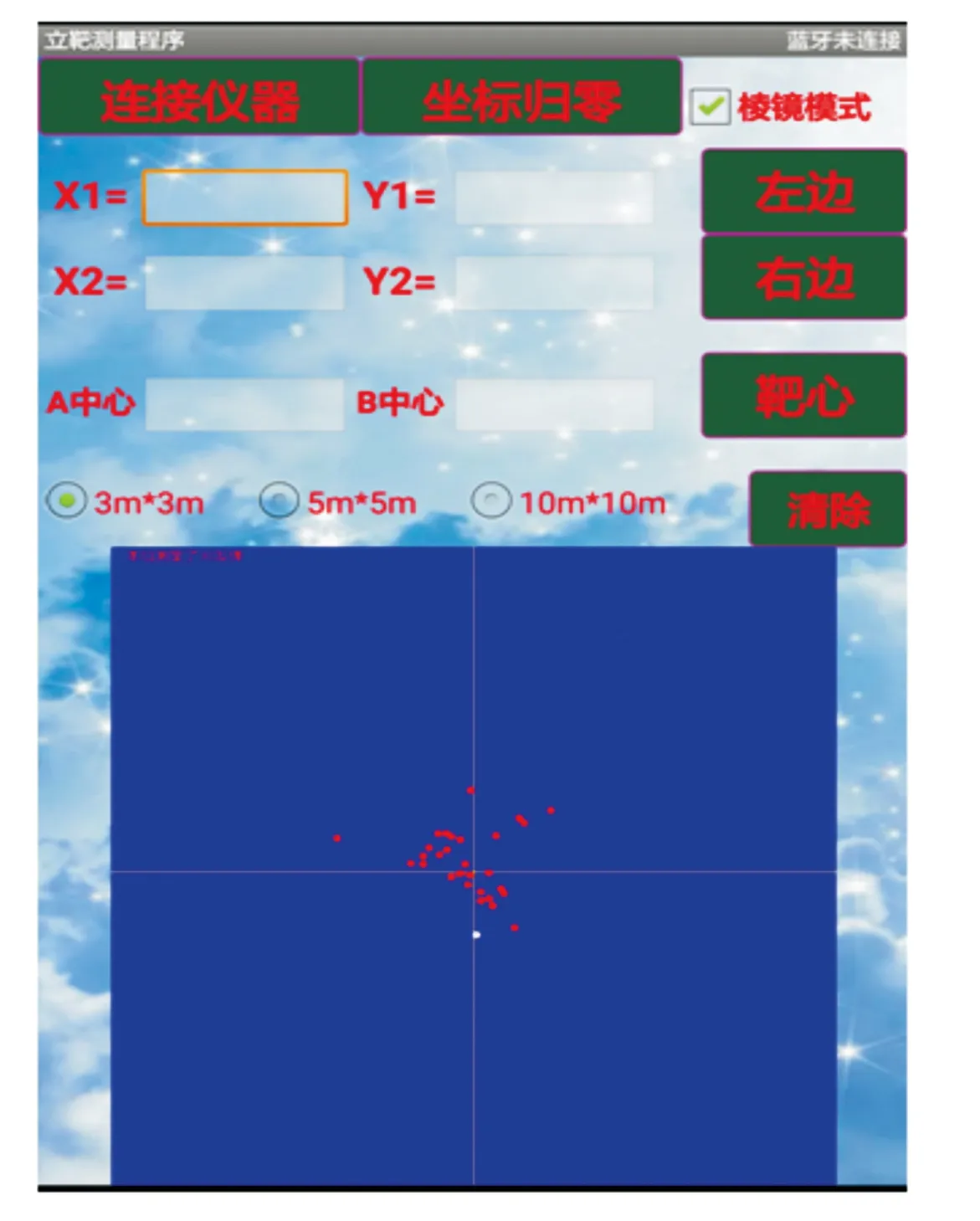
图8 主控程序界面
选一块1.5 m×1.5 m的平整木板,在其表面粘贴上网格间距为1 mm的坐标绘图纸,在纸的中间画十字丝作为靶心,分别在4个象限随机选取8个位置,作为检测目标,为方便检靶,提高检测精度,所有检测目标均处于网格交叉点处,如图9所示。由于,坐标绘图纸上,处于网格交叉点处的坐标可以精确获取,因此,32个模拟目标的立靶坐标真值可认为是已知的。

图9 模拟靶面实物图和弹孔分布示意图
将制作好的模拟靶面垂直于地面设置好,并用水平校准仪精确校准,确定靶面在水平和垂直方向无倾斜。设备架设在靶面左前方大约60 m位置处。
5.2 实验数据分析
采用文章方法对32个检测目标进行测量,再与真值进行比对,结果如表1所示,由于篇幅限制,只列出前10个目标的结果。再通过中误差公式计算得到,误差的中误差为,mx=±0.11 cm,my=±0.16 cm。可见,本文的方法测量精度可达2 mm。
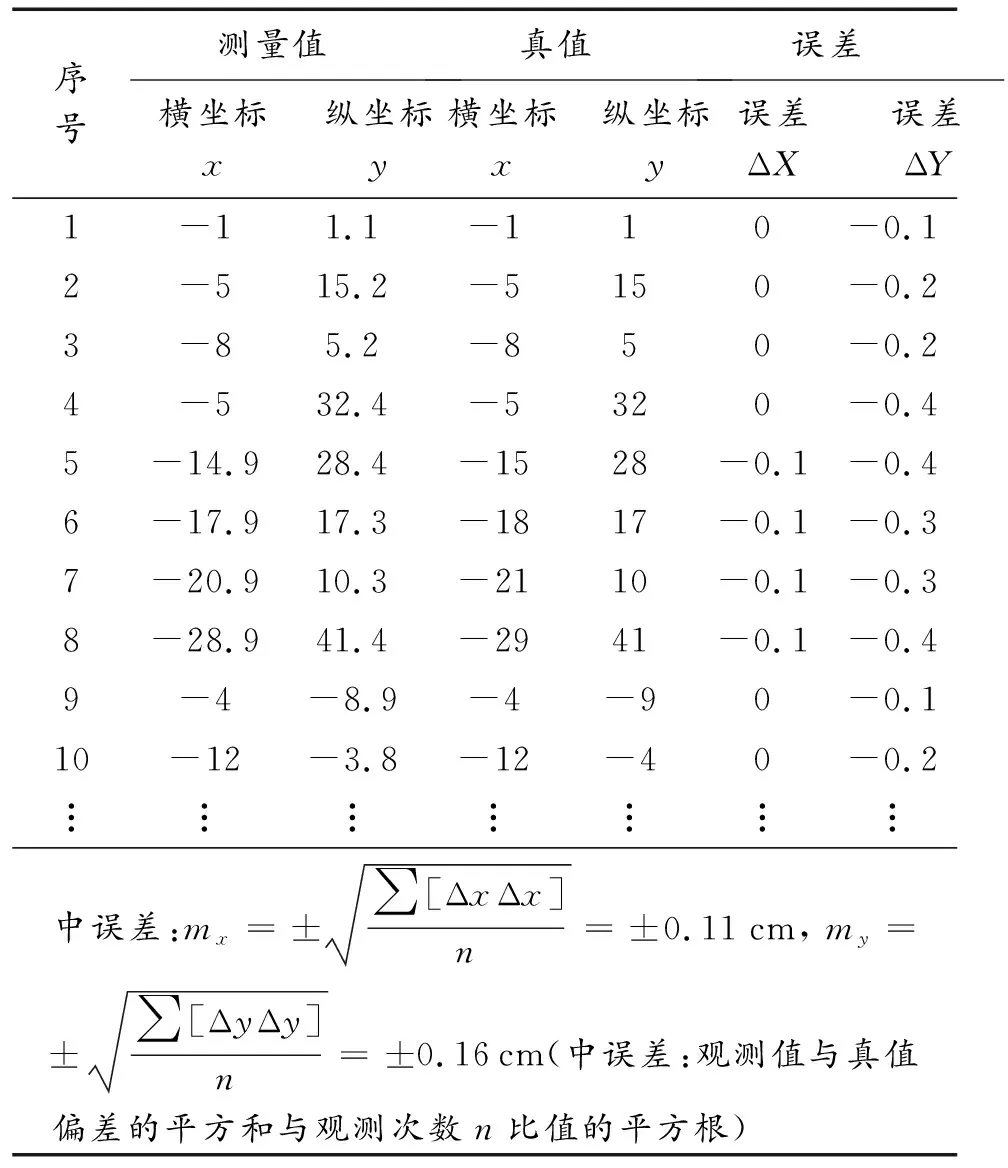
表1 立靶坐标测量精度检测结果(cm)
6 结论
提出了一种基于Android系统及蓝牙技术的智能终端与全站仪一体化立靶坐标测量方法,实现智能终端与全站仪蓝牙模块的无线通讯,远程遥控全站仪实施数据测量,完成立靶坐标测量解算,并将立靶坐标分布图及测量结果显示于智能手持终端。通过模拟试验证明了能极大地提高工作效率和数据处理的准确率。