高稳定性三视场电视探测系统
2021-09-01彭建伟马迎军陈卫宁张高鹏
彭建伟,马迎军,陈卫宁,史 魁,张高鹏
(中国科学院 西安光学精密机械研究所,陕西 西安 710119)
1 引 言
光电测量系统主要用于对快速目标的实时跟踪与测量,电视探测系统是其重要组成部分。随着军事任务需求的多样化,电视探测系统要具有多视场切换功能,可以在短焦大视场进行大范围搜索,而在长焦小视场则可探测识别更远距离的目标,从而实现对目标的精准跟踪及捕获[1-3]。
多视场探测系统通过控制光学系统相应透镜组的移动引起焦距变化,从而实现视场的切换。变倍系统中的视场切换机构大致可分为三种形式:轴向平移变倍机构、径向切入切出变倍机构和旋转式切换变倍机构[4-7]。轴向平移变倍机构的切换速度慢,切换过程中系统离焦,模糊画面时间较长,影响使用。径向切入切出变倍机构采用钟摆形式或者平移机构控制透镜组打入打出光学系统,所占用的系统径向尺寸较大,不利于系统的轻小型化,且装调难度较大。而旋转式切换变倍系统将多个透镜组安装于一个旋转镜筒上,通过一个轴系驱动则可以达到较快的切换速度。旋转式切换变倍系统的结构设计紧凑、空间利用率高,而且现有的机械加工精度也可以满足光学系统的装配要求。但是,旋转式切换变倍机构的定位精度和重复定位精度是设计中的一个难点。定位精度决定变倍机构在进行视场切换过程中光学系统的光轴一致性;而重复定位精度则决定了变倍机构在多次切换过程中以及高低温和剧烈振动条件下系统光轴的稳定性。
视场切换机构通常用于红外光学设备中,可见光和近红外电视设备中并不多见。因为可见光和近红外波段的光学设备对像质要求更高,对光轴的一致性和稳定性等指标更为敏感,对视场切换机构的定位精度和重复定位精度要求更高[8-10]。视场切换运动机构的引入往往会带来更多不稳定因素。安装于舰船上的光学设备,由于工作环境较为恶劣,不但要承受100 ℃左右的高低温差、冲击、振动等,还有高量级、持续性的颠振。舰船的恶劣环境对视场切换机构的可靠性及稳定性是一个考验。本文对一种工作于可见光和近红外波段的三视场电视探测系统进行了研究。该系统采用旋转式切换变倍机构,通过蜗轮蜗杆驱动,通过磁铁以及柱塞等对各视场位置限位,实现了三个视场的连续快速切换,保证了各视场的光轴一致性和稳定性,同时具有较高的可靠性。
2 设计原理
2.1 系统主要技术指标
根据实际的使用需求,三视场电视探测系统的主要技术指标如下:
(1)工作波段:0.4~1.0 μm;
(2)分辨率:1 280×1 024;
(3)水平视场:5°/1.3°/0.7°;
(4)帧频:100 Hz;
(5)光轴稳定性:典型视场方位、高低均≤0.05 mrad(全温度范围);
(6)光轴一致性:大视场与典型中视场间光轴的平行性误差(方位、高低)≤0.1 mrad;小视场与典型中视场间光轴的平行性误差(方位、高低)≤0.05 mrad。
系统对光轴稳定性及一致性提出了较高要求。光轴稳定性指的是系统在恶劣工作环境,包括高低温、振动、冲击等前后的光轴变化。结合光学系统解算,指标要求典型的光轴稳定性不大于10″,即不超过2.8 个像元尺寸。大小视场与典型中视场的平行性误差分别不超过1.5 和5.2个像元尺寸[11-12]。
2.2 光学系统方案
选用某国产5.5 μm 像元尺寸探测器芯片,设计完成的光学系统如图1 所示。光学系统的主要参数见表1。
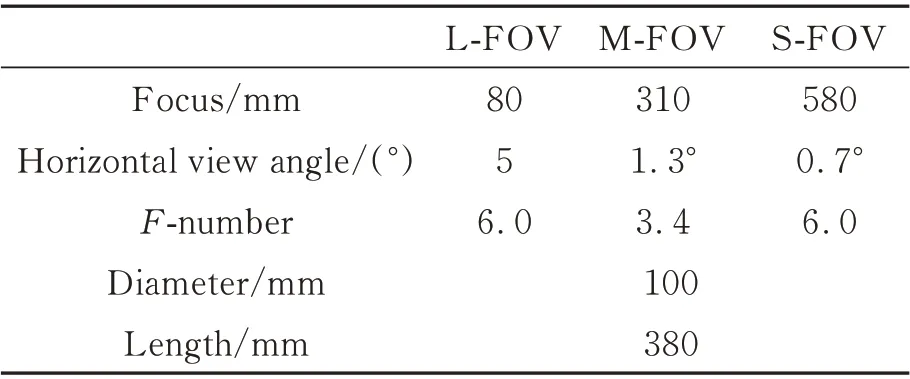
表1 三视场电视探测光学系统参数Tab.1 Parameter of optical system for TV detection system with three fields of view

图1 三视场电视探测光学系统Fig.1 Optical system of TV detection system with three fields of view
该系统将1.3°中视场作为典型视场,由前后固定透镜组构成,其中最后一片透镜作为调焦组前后移动。大小视场与中视场共用前后固定透镜组,并通过旋转切入、切出相应的光学部件实现3 个视场的切换。由1.3°中视场切换至0.7°小视场,需将小视场光学组件逆时针旋转75°至光路中;由1.3°中视场切换至5°大视场,需将大视场光学组件顺时针旋转45°至光路中。镜头装配过程以中视场为基准,通过调节大视场切换组与小视场切换组的偏心和倾斜实现三视场光轴的调整。在系统设计时,着重对切换镜组光轴一致性的装调、切换机构的稳定性和定位精度等进行了研究。
3 机械设计
系统由主框架、前固定镜组、旋转切换镜组及驱动、后镜组、调焦镜组、滤光切换组件及探测器组件构成。其爆炸示意图如图2 所示。主框架是系统的支撑部件,设计为具有加强筋的箱体结构,提高其强度。旋转切换镜组位于镜头中部,通过精密轴系架设于主框架上。切换镜筒上共安装有4 组透镜及两个通光孔,其两两同轴分布组成3 个视场光路的一部分。设置两套磁铁限位组件,分别对小视场和大视场位置进行限位,通过修切垫片保证各视场光轴的一致性。柱塞球头与旋转镜筒配合,对中视场位置进行限位。磁铁限位组件和球头柱塞可有效保证各视场的定位精度和重复定位精度。切换镜组采用蜗轮蜗杆的驱动形式,既可以实现大的减速比,又具有自锁作用,可以保证其旋转到位后的光轴稳定性。调焦镜组采用高精度凸轮驱动形式以满足其位移的高精度要求。镜头尾部安装有滤光片切换机构,通过齿轮传动实现可见光和近红外波段的切换。镜头后端与成像组件相连,电控盒位于镜头的侧面。
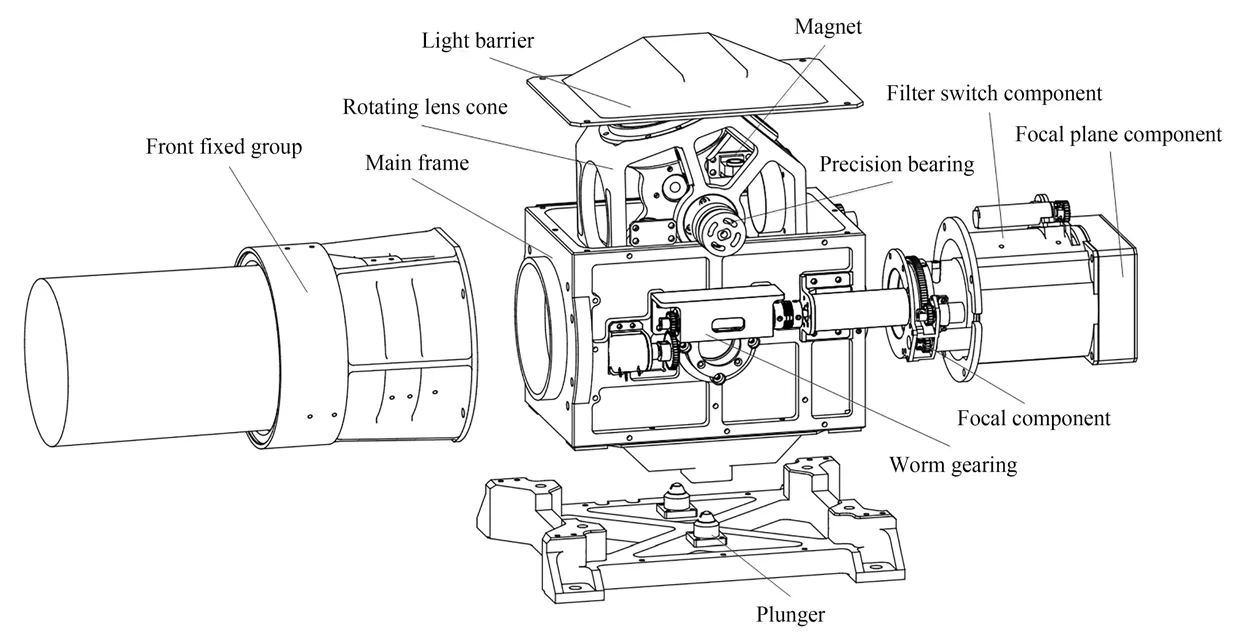
图2 三视场电视探测系统爆炸图Fig.2 Explosive view of TV detection system with three fields of view
4 系统高稳定性设计保证
4.1 光轴一致性装调
为保证光学镜头的成像质量,旋转镜组光轴与固定组光轴的偏心和倾斜须满足设计要求。同时,为保证三个视场的光轴一致性要求,须将大视场、小视场旋转镜组光轴与前后固定组穿心至同轴。光轴调整通过经纬仪配合分划板实现。其原理如图3 所示。将基准分划板采用定心工艺安装于前固定镜筒内,用于标定光学系统的基准光轴。在大小视场旋转镜筒内均设置分划板,分划板位于基准分划板后端。通过经纬仪观测前后分划板中心十字线,调整磁铁限位组件的位置,使旋转镜组分划板的中心十字线与前镜组分划板重合,可认为三个视场光轴重合。图4 为分划板工装及穿心现场。

图3 光轴一致性装调原理Fig.3 Schematic diagram of optical axis consistency adjustment
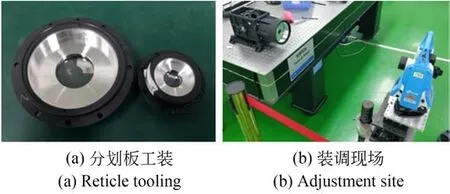
图4 分划板与光轴一致性装调现场Fig.4 Reticle and optical axis consistency adjustment site
4.2 精密旋转轴系
为实现光机结构的高精度与高稳定性,轴系经过专门设计。如图5 所示,轴系一侧采用高精度P4 级角接触球轴承配对使用,同时采用背靠背的安装方式,通过内环隔离,外环压紧的方式进行预紧,轴系的径向跳动在0.005 mm 以内。精密轴系的跨距以及温度范围的跨度较大,因此另一侧轴系采用深沟球轴承游动的方式来提高其环境适应性。高精度的轴系使得旋转镜组具有很高的定位精度和重复定位精度,从而保证整个运动机构多次重复切换过程中旋转镜组的轴线位置始终保持不变。
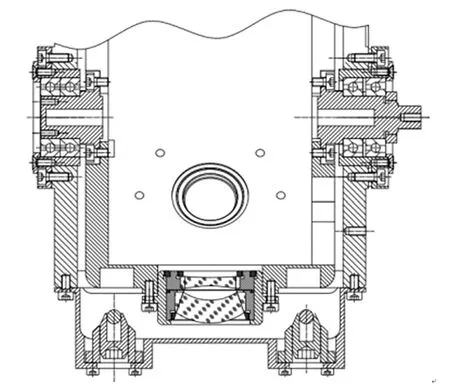
图5 精密轴系Fig.5 Precision bearing
4.3 限位组件选型
磁铁限位组件在系统到达大、小视场位置时保持吸附状态。中视场时旋转镜组中无透镜位于光路中,通过柱塞限位保证其稳定性。通过磁铁限位组件和球头柱塞对大、中、小3 个视场位置进行限位,不但可以保证视场到位后的定位精度和重复定位精度,还能有效防止旋转切换机构反转或者挣脱,提高系统的结构稳定性。为了满足系统冲击振动等环境试验要求,选用直径为10 mm,厚度为6 mm 的强力钕磁铁,其接触面产生的磁场吸力为19.6 N,同时配合一个同等吸力的磁钢使用。球头柱塞通过外螺纹旋拧至一定深度与旋转镜筒球状凹槽配合。球头直径为5 mm,球头弹力负载根据挤压深度变化,由13.5 N至44.4 N。实际装配过程中,柱塞旋拧深度较浅,其负载约为15 N。
4.4 旋转切换驱动机构设计
旋转切换镜组采用蜗轮蜗杆减速机构作为传动机构。对旋转切换机构进行了运动学及动力学分析,以保证旋转驱动机构具有足够冗余量和使用寿命。通过合理设计减重槽和设置配重块,保证旋转切换镜组质心尽可能靠近旋转轴。优化完成后的旋转切换镜组如图6 所示,其总质量为0.96 kg,其质心位置为(-0.37,-0.51,-2.6)mm,以图示坐标原点及坐标系计算。Z轴作为旋转轴,X,Y方向质心位置偏离旋转轴均在1 mm 以内,满足配平需要。以Z轴作为旋转轴,旋转切换镜组的转动惯量为J=2.7 g·m2。
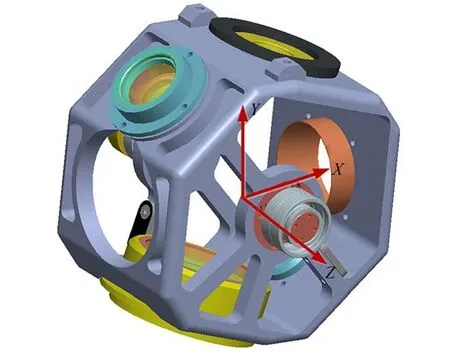
图6 旋转切换镜组Fig.6 Rotary switching group
蜗轮蜗杆驱动机构不但具有较高的传动比,还具有反向自锁特性,可防止切换机构挣脱或者反转,提高机构的稳定性。蜗杆模数为0.5,头数为1,蜗轮模数为0.5,齿数为50,蜗轮蜗杆减数比为1∶50。三视场切换动作中,由中视场切换为小视场,旋转镜筒需转动75°,即蜗轮需转动5π/12,蜗杆需转动约20.8π;由中视场切换为大视场,旋转镜筒需转动45°,即蜗轮需转动π/4,蜗杆需转动约12.5π。以视场切换时间不大于1 s计算,电机组合输出端的转速应不低于630 r/min。
根据旋转切换机构的工作原理,直流电机需要提供的转矩包括旋转镜组启动自转所需的转矩Mrot和克服强力钕磁铁吸引力矩所需的转矩Mmag,即:

旋转切换镜组切换行程最大为75°,即5π/12,切换时间为t=1 s,电机的加速时间为t1=0.01 s,则启动加速度为:
其中:Fmag为钕磁铁吸附力,Fmag=19.6 N;L为钕磁铁安装位置距离旋转轴的力臂长度,L=37.5 mm。则Mmag=735 mN·m。

考虑到蜗轮蜗杆减数比为1∶50,则要求直流电机与减速箱输出转距21.76 mN·m。根据工程经验,考虑到电机输出力矩效率及低温工况的力矩损耗,直流电机应至少输出2 倍力矩,约为44 mN·m。
5 系统测试结果
依据上述的设计与研究结果,完成整机加工生产装配,如图7 所示。装调完成后的三视场电视探测系统视场切换平稳流畅,结构稳定性高,三个视场的成像质量优良,实测小视场传递函数达到0.3,大视场传递函数达到0.5。对整机进行了振动、冲击和高低温试验,在低温-45 ℃的环境下,切换机构仍正常工作,验证了各驱动机构的可靠性,图8 为系统振动试验现场图。采用经纬仪对试验前后典型中视场光轴稳定性和3 个视场光轴一致性进行了测量,实测数据见表2。结果表明,系统中视场光轴稳定性不超过8″,3 个视场光轴一致性均在1 个像元尺寸内,满足指标要求。

表2 光轴稳定性及光轴一致性的测试结果Tab.2 Results of stability and consistency of axis

图7 三视场电视探测系统Fig.7 Photo of TV detection system with three fields of view

图8 振动试验现场Fig. 8 Vibration test site
对系统的成像效果进行了一系列的实验室及室外场景测试。图9 为三视场电视探测系统对1.6 m 平行光管鉴别率板成像图片,图10 是外场试验时拍摄的城市楼房和高塔图片。从图片质量分析,系统对鉴别率板条纹分辨清晰,边缘成像锐利,图像对比度高,表明系统的成像质量优良。
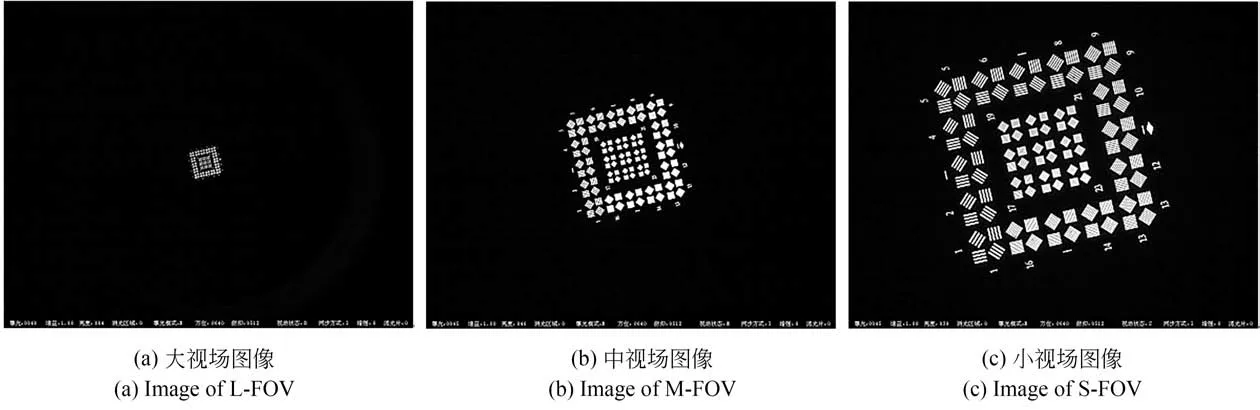
图9 实验室测试图像Fig.9 Images in laboratory test

图10 外场试验图像Fig.10 Images in outfield test
6 结 论
本文通过分析电视探测系统的指标,提出了采用旋转式切换机构实现三视场切换的设计思路。基于该思路选定了光学系统方案,建立了系统的机械构型。研究了提高系统稳定性的措施,包括光轴一致性的装调工艺,精密旋转轴系、强力钕磁铁以及高弹力的柱塞限位机构和具有自锁特点的蜗轮蜗杆驱动机构,并给出了限位机构和驱动机构的选型计算过程和结果。经过振动、冲击以及高低温试验验证,系统表现出高稳定性和可靠性。测试结果表明,系统中视场光轴稳定性不超过8″,三个视场光轴一致性均在1 个像元尺寸内,满足指标要求。最终对成像效果进行测试,系统各个视场的成像质量优良,分辨率高、探测距离远,完全满足使用要求。