CORS结合陀螺仪在杭富城际铁路隧道定向测量中的应用
2021-09-01杨彬林飞
杨彬,林飞
(杭州市勘测设计研究院有限公司,浙江 杭州 310012)
1 引 言
在隧道的盾构施工中,一般采用单向掘进,由于接收端的盾构钢环的大小和位置是固定的,其半径通常只比盾构机的半径大 20 cm,如何确保盾构机按照设计的线路从接收钢环中顺利贯通出去就显得尤为重要了。
如何引入高精度的坐标方位角对保证水平方向的顺利贯通意义重大[1],传统的方法是通过精密导线传递式引测至洞内,但是这种方法必然会随着掘进距离的增长而伴随着精度的下降,一般来说,对于距离大于 1.5 km的隧道,为保证顺利贯通,在掘进过程中加测陀螺边可以有效地检核及纠正方位的传递。
另一方面,如要确保盾构隧道的顺利贯通,隧道两端控制点的准确性乃至整个基准控制网的相对精度和绝对精度都必须要有所保证。作为整个工程平面测绘的基准,首级GNSS控制网在城市轨道交通的控制测量中至关重要。城市CORS一般和当地的城市高等级控制点均进行过联测,各点具有良好的兼容性[2]。考虑到整个工程与其他地铁线路的衔接问题,平面基准网的起算点采用城市连续运行参考站(CORS)系统最为合适,且城市CORS具有点位稳定、观测条件好、观测时段长等优点[3],有利于提高平面基准网的精度。
2 平面基准网的建立
杭州至富阳城际铁路工程位于杭州市主城区与富阳区(原富阳市)之间,工程沿线点间高差较大,地形条件复杂。全长约 23.508 km,设站11座,均为地下站,平均站间距约 2.3 km,在终点站与杭州地铁6号线搭接。该工程全线区间除很小部分采用明挖以外,绝大部分均采用盾构施工。
工程线路沿线共布设了32个GNSS点,然后与4个距离工程线路最近的CORS站点一起组成平面基准网,如图1所示:
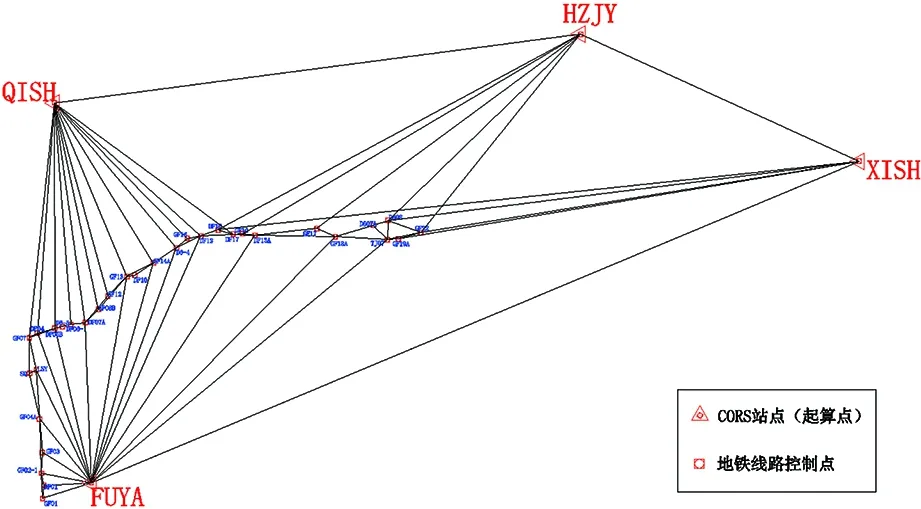
图1 平面基准网示意图
外业采用6台Trimble R9双频GPS接收机同步进行,考虑到CORS站点与线路控制点距离较长,为了尽量提高精度,将观测时间延长至2个小时,具体作业内容按表1规定执行:
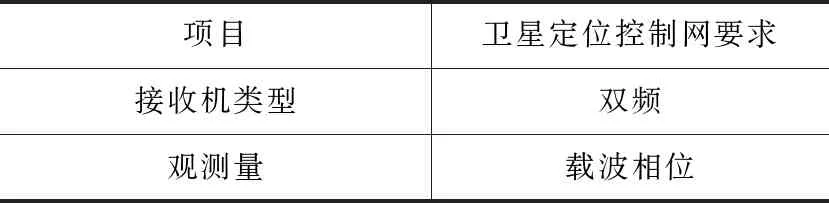
GPS测量作业技术指标 表1
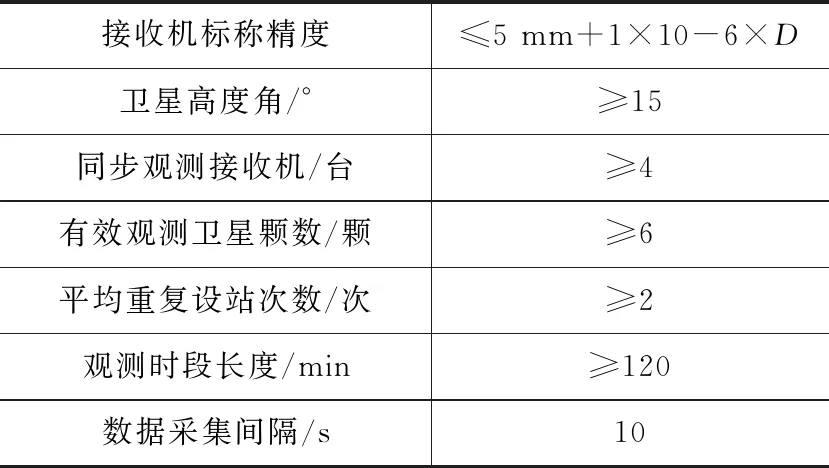
续表1
内业采用TBC软件进行基线解算,并采用武汉大学COSA平差软件进行平差。平面基准网二维约束平差的结果如表2所示:
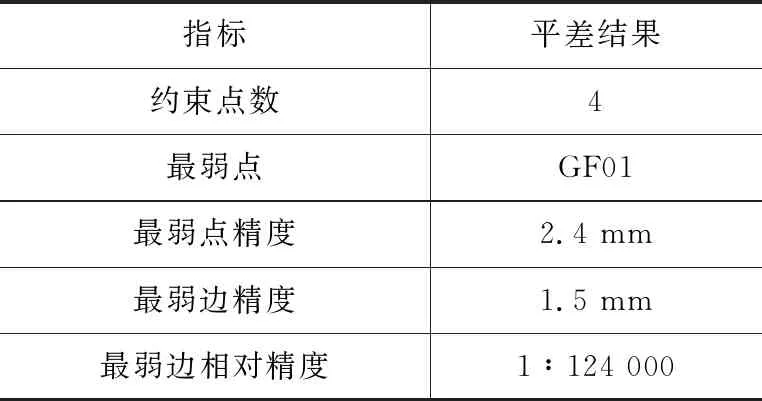
二维约束平差结果 表2
各项精度指标均满足规范要求。
3 陀螺定向测量
陀螺经纬仪(全站仪)主要是利用陀螺自身的物理特性以及地球自转的影响,来实现快速测定真北方位的功能,且不受外界条件限制,与传统测量相比,陀螺定向具有操作简单、精度高及占用井筒和平巷时间少等优点[4],同时,在洞内导线的传递过程中,加测陀螺定向边可以发现原有导线边的水平方向的误差[5],有利于减少测角误差的累积,适合长距离隧道定向测量。本文所用陀螺仪为南方测绘所产的NTS-342G10型陀螺全站仪,寻北精度10″,寻北时间 ≤10 min。
3.1 基本的定向过程
本文应用的工程所在区间为杭富城际铁路的汽车北站~高桥站的盾构区间,地上控制点为平面基准网中的SQ及LSY,即地面控制边为:LSY→SQ。根据已知点数据可计算地上控制边坐标方位角α上。通过二井定向进行联系测量传至井下,然后通过支导线向隧道内施测,地下待测边为:T666→T927,由联系测量及隧道内导线测量得出的数据可算出地下待测边坐标方位角α下。
陀螺仪的基本定向过程为:
(1)在地面控制边LSY→SQ进行3测回的陀螺定向测量;
(2)在地下待测边T666→T927进行4测回陀螺定向测量,得出地下边陀螺方位角αT下;
(3)再返回地面对控制边LSY→SQ进行3测回的陀螺定向测量,以地面控制边的两次各3测回陀螺定向测量结果的均值为地上边陀螺方位角αT上,检验仪器的稳定性和精度并最终确定仪器常数,确保陀螺定向成果准确可靠。
3.2 待测边坐标方位角的计算
地面标定仪器常数△为:
△=α上-αT上
(1)
则地下待测边坐标方位角α下的计算公式为
α下=αT下+△+δ
(2)
式中:α上为地面控制边坐标反算方位角;
αT上为地面控制边实测陀螺方位角;
αT下为地下待测边实测陀螺方位角;
δ为地面已知边和待定边子午线收敛角差数,单位为秒,其计算公式为[6]:
(3)
式中:B为测区当地纬度;
y下为地下待定边端点的横坐标(km);
y上为地面已知边端点的横坐标(km)。
4 算例分析
汽车北站~高桥站的盾构区间全长约 1 880 m,采用盾构单向掘进,大里程端始发,小里程端接收,在陀螺定向之前刚进行过一次联系测量及洞内导线测量。平面基准网平差所得地面控制点SQ及LSY及导线测量所得T666及T927成果如表3所示:
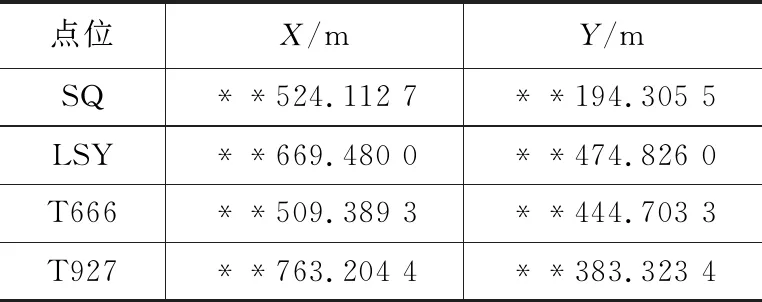
已知点及待测点坐标成果 表3
4.1 陀螺定向测量数据分析
陀螺仪所测地上地下控制边的数据如表4~表6所示:

第一次地上边陀螺定向结果 表4
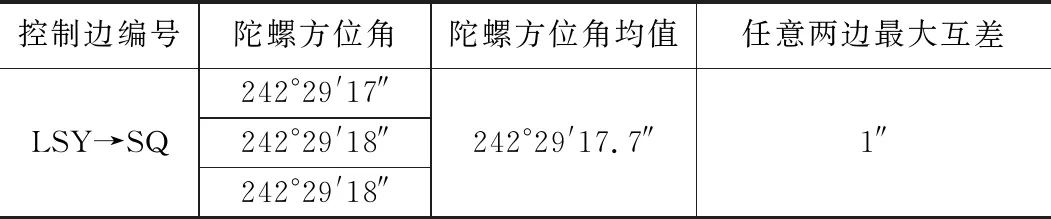
第二次地上边陀螺定向结果 表5
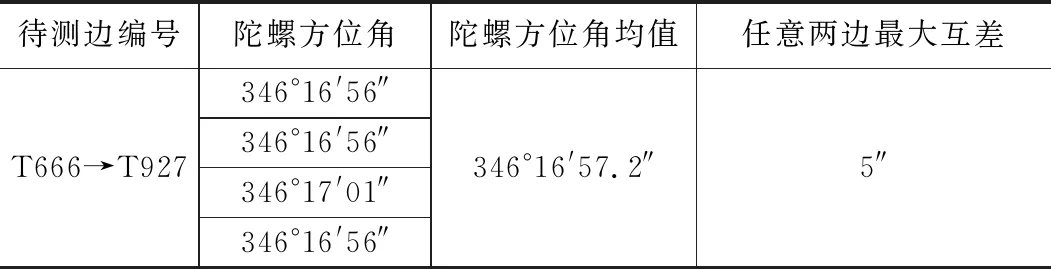
地下边陀螺定向结果 表6
根据已知点及待测点坐标成果计算得知地上控制边LSY→SQ坐标方位角为:α上=242°36′23.6″,地下待测边T666→T927坐标方位角为:α下=346°24′8.8″。由式(1)、式(2)、式(3)计算可得陀螺仪测出的待测边T666→T927坐标方位角为:346°24′3.9″。可得陀螺方位角较差为4.9″。
在《城市轨道交通工程测量规范》(GB/T 50308-2017)中规定:当隧道单向掘进超过 1.5 km时应加测陀螺边,使用的陀螺仪标称精度不低于15″,陀螺方位角较差不大于20″[7]。以上结果表明陀螺仪定向测量结果良好,也说明作为支导线起算点的地上已知控制点的绝对精度很好。
4.2 贯通精度及结果分析
在隧道贯通之后,对该隧道进行平面贯通测量,首先定贯通面附近的点T1432为贯通点,两端各向其测支导线进行贯通测量,施测后的贯通误差如表7所示:

平面贯通点误差计算 表7
然后再进行全线的附合导线测量,附合导线略图如图2所示:
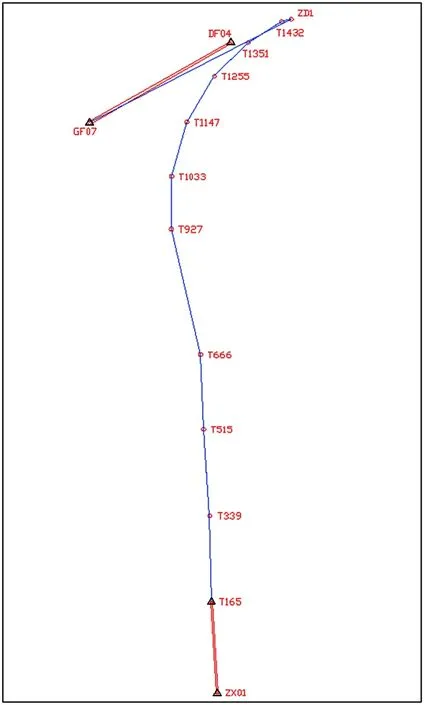
图2 附合导线略图
经计算后附合导线的主要精度指标如表8所示:

贯通后附合导线精度 表8
由表7和表8可以看出,该隧道贯通精度良好,且贯通之后联测的附合导线的主要精度指标都在限差范围以内,这说明隧道两端的已知点相对精度良好。
5 结 论
通过在杭州汽车北站~高桥站的盾构区间的实际测量结果可得出如下结论:①以CORS为起算点的基准网可有效保证线路局部区间隧道两端地上控制点的相对精度和绝对精度,这可以有效保证盾构隧道的贯通精度。②陀螺全站仪在长隧道的掘进过程中可以对地下导线边做有效的检核,可作为隧道定向测量的重要辅助手段。