用于船舶永磁推进电机驱动控制的MMC 模型预测方法
2021-08-31郭燚王超解文祥
郭燚,王超,解文祥
上海海事大学 物流工程学院,上海 201306
0 引 言
随着船舶排水量和主尺度的增加,船用中压直流电力系统已成为当前电力推进船舶领域的研究热点[1],其中推进变频器的性能对全船电力系统的可靠性具有重要影响。相较于传统的多电平变频器而言,模块化多电平变换器(modular multilevel converter,MMC)具备模块化和可拓展性的优点,这将带来良好的谐波性能和故障处理能力,所以MMC 已成为中高压交流调速系统的研究热点[2]。
目前,MMC 在输电控制、中压电机控制和电能质量改善控制等领域的应用较为广泛,其控制方法分为经典控制类和模型预测控制类[3]。Spichartz等[4]分析了MMC 在船舶推进系统的应用现状,其中西门子和ABB 都选择了经典控制法。邵德东等[5]采用经典控制法建立了基于MMC 驱动的船舶推进系统,填补了该领域的空白,但其存在设计复杂、调试时间长等缺点。郭燚等[6]在文献[5]的基础上加入了飞跨电容,采用经典控制法解决了共模电压过大的问题,但其控制方法仍然属于经典控制类,同样存在设计复杂、调试时间长的问题。Kumar 等[7]和Zhao 等[8]采用经典控制法解决了MMC 驱动电机低速时的电容电压不平衡问题。Li 等[9]建立了基于MMC 整流的船舶中压直流永磁发电机仿真系统,并采用了经典控制法实现了MMC 控制。Sharma 等[10-11]采用模型预测法实现了控制MMC 驱动低压永磁同步电机(permanent magnet synchronous motor,PMSM),但尚未解决MMC 驱动中压电机时转矩脉动过大的问题。相较于经典控制法,模型预测法更为简单,且其无需采用PI 调节,因此可以简化系统设计、减少系统的参数整定,从而节省系统调试时间[12]。随着数字信号处理(digital signal processing,DSP)技术的进步和处理器计算能力的提升,模型预测法将得以更广泛的应用。
针对经典控制法的参数整定问题和复杂的控制策略问题,本文拟提出适用于船舶电力推进MMC 变频器的模型预测控制方法,设计相应的调速系统和螺旋桨模型;并将在Matlab/Simulink环境下进行仿真分析,以验证所提模型预测法的可行性。
1 船舶推进系统的模型与电路拓扑
船舶推进系统模型的如图1 所示。
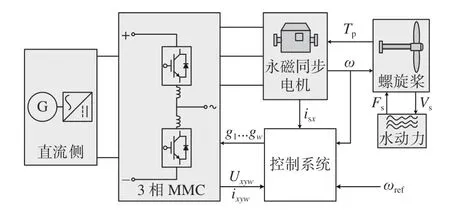
图1 基于MMC 的船舶推进系统模型Fig. 1 Model of ship propulsion system based on MMC
直流侧发电机组经由整流器为三相MMC 提供直流电源,交流侧为永磁同步电机驱动螺旋桨负载以转速 ω转动。水动力模型根据船速Vs对螺旋桨施加反作用力Fs,同时螺旋桨为永磁同步电机提供负载转矩Tp。 将转速控制信号 ωref、实际螺旋桨转速 ω、永磁同步电机三相定子电流isx以及MMC 的子模块电容电压Uxyw和 桥臂电流ixyw输入至控制系统,然后输出MMC 的控制信号g1···gw。图1 中:x∈(a,b,c), 为MMC 三相的标号;y∈(u,l),为上/下桥臂标号;w∈(1,2,3,···,N),为单桥臂子模块的标号,其中N为 MMC 子模块的最大数量。
1.1 MMC 拓扑
三相MMC 的基本拓扑结构如图2 所示,三相交流负载连接在每一相的中点 (a,b,c)。MMC每一相被其中点分成上下2 个桥臂 (u,l),每个桥臂上有N个子模块(SM)和一个电抗器R,L。桥臂上的电抗器将有助于限制因桥臂之间瞬时电压差而引起的冲击电流,同时可以最大限度地减少相间环流的幅值。

图2 三相MMC 拓扑结构Fig. 2 Topology of three-phase MMC
图2 中:idc为直流侧电流;Udc为直流侧电压;R1,L1为 直流母线的电阻值和感抗值;ixu,ixl分别为MMC 单相上桥臂和下桥臂的电流;Ro,Lo分别为负载的电阻值和感抗值;ixo,uxo分别为MMC 的单相输出电流和输出电压;直流侧的O 为理想直流源的中性点;交流负载侧的O′为三相负载中性点。
图2 中MMC 半桥子模块的结构如图3 所示,由2 个IGBT(S1 和S2)构成,是所有子模块结构中半导体开关器件数量最少的一种,故其结构最简单、易于控制、损耗低且效率较高。图3 中:usm为 半桥子模块的输出电压;ixy为输入到半桥子模块的桥臂电流;uC1为电容C1的端电压。
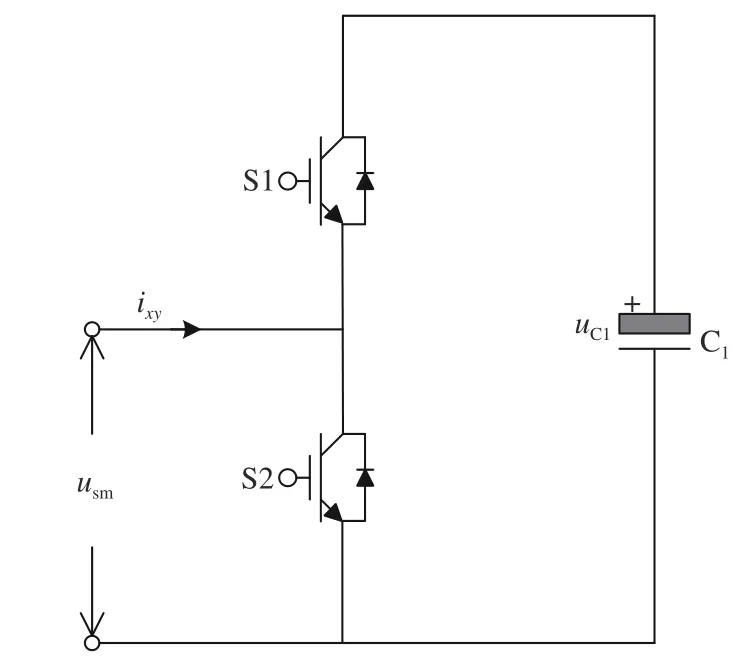
图3 半桥子模块的拓扑结构Fig. 3 Topology of half-bridge SM
半桥型子模块的工作模式如表1 所示,当S1导通S2 关断时,子模块被投入;当S1 关断,S2 导通时,子模块被切除。
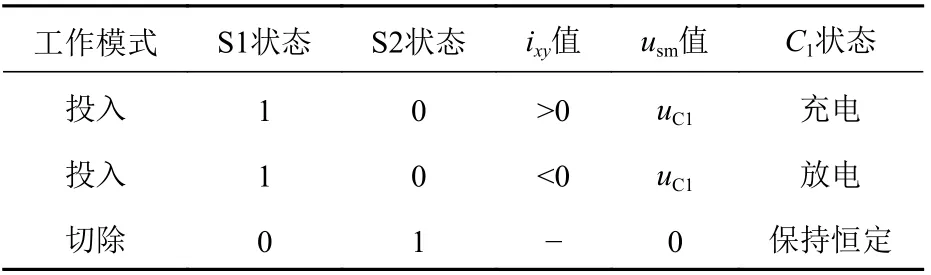
表1 半桥子模块的工作模式Table 1 Operation mode of half-bridge SM
1.2 船舶螺旋桨负载模型
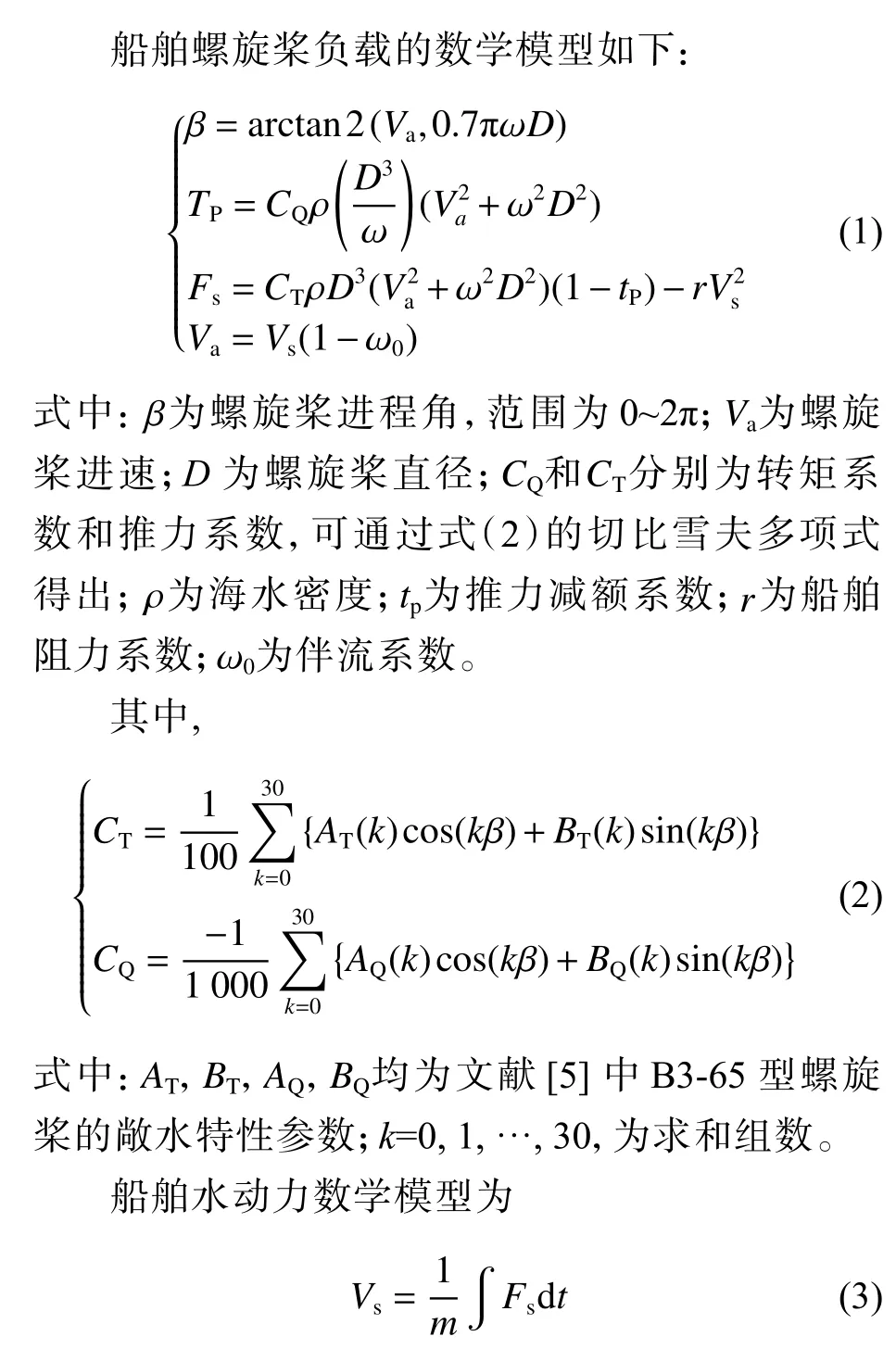
式中:m为船舶的重量;t为时间。
2 经 典 控 制 的 复 杂 性 分 析 与 解 决方案
2.1 经典控制系统
图4 所示为单相MMC 的等效电路。其中uxu,uxl分别为MMC 单相上桥臂和下桥臂的电压。

图4 单相MMC 的等效电路Fig. 4 Per-phase equivalent circuit of MMC
MMC 单相上桥臂和下桥臂的电压uxu,uxl分别为

由于桥臂电抗器可以最大限度地降低相间环流的幅值,故令
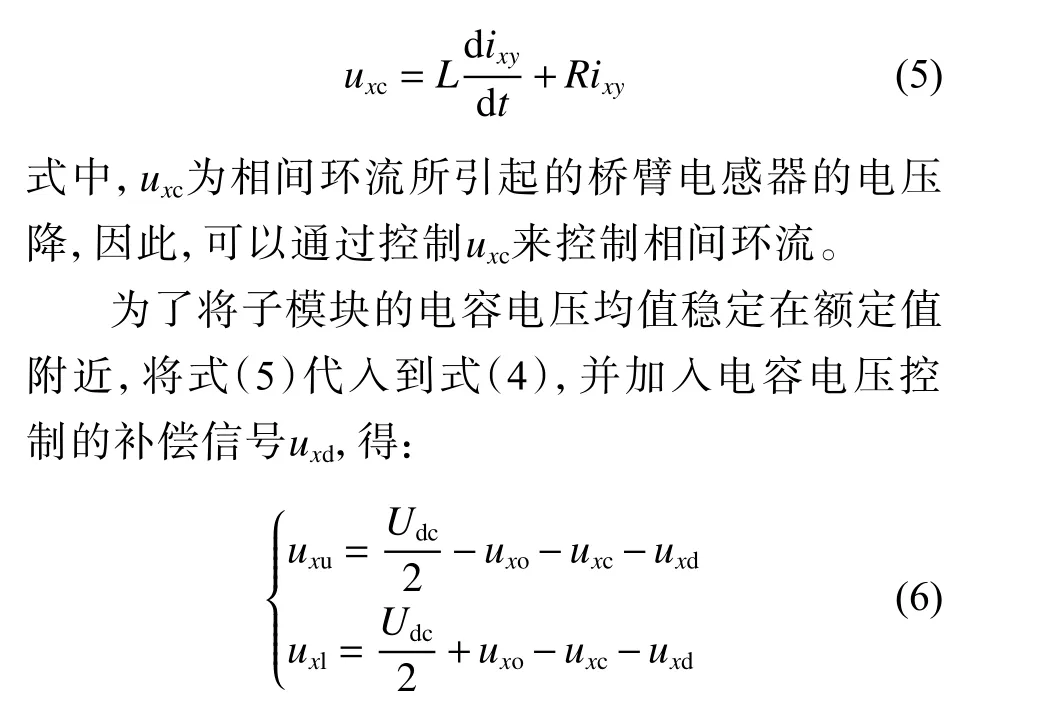
由式(6)可知,为了得到MMC 单相上/下桥臂的调制信号,需要先求得uxo,uxc,uxd,其经典控制原理如图5 所示。由文献[3]可知,这3 个变量涉及输出电流、电容电压和环流抑制等控制环节。这3 个子控制模块的输出都是参考电压的补偿信号,将补偿信号和参考电压按照式(6)得到调制信号,然后经过PWM 调制即可得出每相上/下桥臂需要导通的模块数量Hxu和Hxl。为了消除电容电压不均衡对系统的影响,还需要设计子模块电容电压的均衡控制环节。图5 中:θ 为三相电流的相位角;ixo_ref为MMC 输出电流的参考值;gxu和gxl分别为上/下桥臂子模块的开关信号;FOC 为电机矢量控制。

图5 船舶推进系统中MMC 的经典控制框图Fig. 5 Classical control diagram for MMC in the ship propulsion system
2.2 经典控制系统的复杂性分析
针对输出电流、电容电压和环流抑制这3 个子控制模块,建立如图6 所示的控制结构[13-14]。

图6 经典控制的子控制Fig. 6 Subcontrol module of classical control
图6(a)中:首先,将三相静止坐标系abc 的实际输出电流ixo和 理论参考值ixo_ref分别转换到两相旋转坐标系dq,得到实际输出电流ido和iqo,以及理论参考值ido_ref和iqo_ref;然后,将参考值和实际值相减,经过PI 调节,即可得到两相旋转坐标下的参考电压补偿信号udo和uqo;最后,再转换到三相静止坐标系,即可得输出电压信号uxo,用以补偿参考电压,从而控制输出电流。由此可见,在输出电流控制过程中需要2 个PI 调节器,并整定4 个参数。
图6(b)中,电容电压控制环节需要外环电压控制和内环电流控制相嵌套。通过外环电压控制,以调节单相2N个子模块电容电压的平均值UC, 使其维持在参考值UCref,其中直流母排电流ixd的参考值ixdref为

直流电流的大小与有功功率成正比,其在内部电流控制环的作用下,可以实现三相有功功率平衡,通过与参考值进行比较,经PI 调节即可得到控制电容电压的参考电压补偿信号uxd。由此可见,电容电压控制模块也需要2 个PI 调节器,并整定4 个参数,由于嵌套控制,这4 个参数的整定过程更为复杂。
根据Bahrani 等[15]的MMC 环流数学模型,本文构建了图6(c)所示的环流抑制控制结构,其中:ixz为三相环流;izd和izq为ixz在两相旋转坐标下的解耦电流;f为工频。将两相旋转坐标下的环流参考值设为0,进行环流解耦,经PI 调节输出后转换到三相静止坐标系,即可得到环流引起的压降uxc,用以补偿参考电压,从而抑制环流值。由此可见,环流抑制控制需要2 个PI 调节器,并整定4 个参数。
综上所述,基于MMC 的船舶推进变频器经典控制系统至少需要6 个PI 调节器,整定12 个参数,再加上调速部分的2 个PI 调节器,共计需要8 个PI 调节器,整定16 个参数。这无疑增加了系统的设计难度和调试时间成本,而大量PI 调节器的引入也会降低系统的动态响应。
2.3 模型预测法的优势
模型预测法诞生于上世纪80 年代,但因其计算量较大而没有大规模推广应用。近年来,随着DSP 技术的发展尤其是微处理器运算能力的提升,模型预测法得以逐步应用。由文献[16] 知,相对于经典控制法,不使用PI 调节器的模型预测法更为简单,动态响应也较好,更便于拓展。每当增加一个控制目标的时候,模型预测法不需要单独对其进行设计,仅需在成本函数中增加一个控制目标即可。模型预测法的复杂之处在于,如何开展系统下一个采样周期的行为预测并减少预测过程中的计算量。对于MMC 来说,模型预测法主要分为直接模型预测法、间接模型预测法和多步模型预测法,其中后面2 种方法可以显著降低计算量。
间接模型预测控制方法如图7 所示,仅需列出系统的数学模型,并采用欧拉前置法基于系统数学模型的k时刻状态来预测 (k+1)时刻的状态,然后采用成本函数将不同控制目标的状态联系起来,当成本函数值最小时即为下一时刻的最优状态。图7 中:usmxyh为 各个子模块的输出电压,ixo_p为预测的MMC 输出电流。
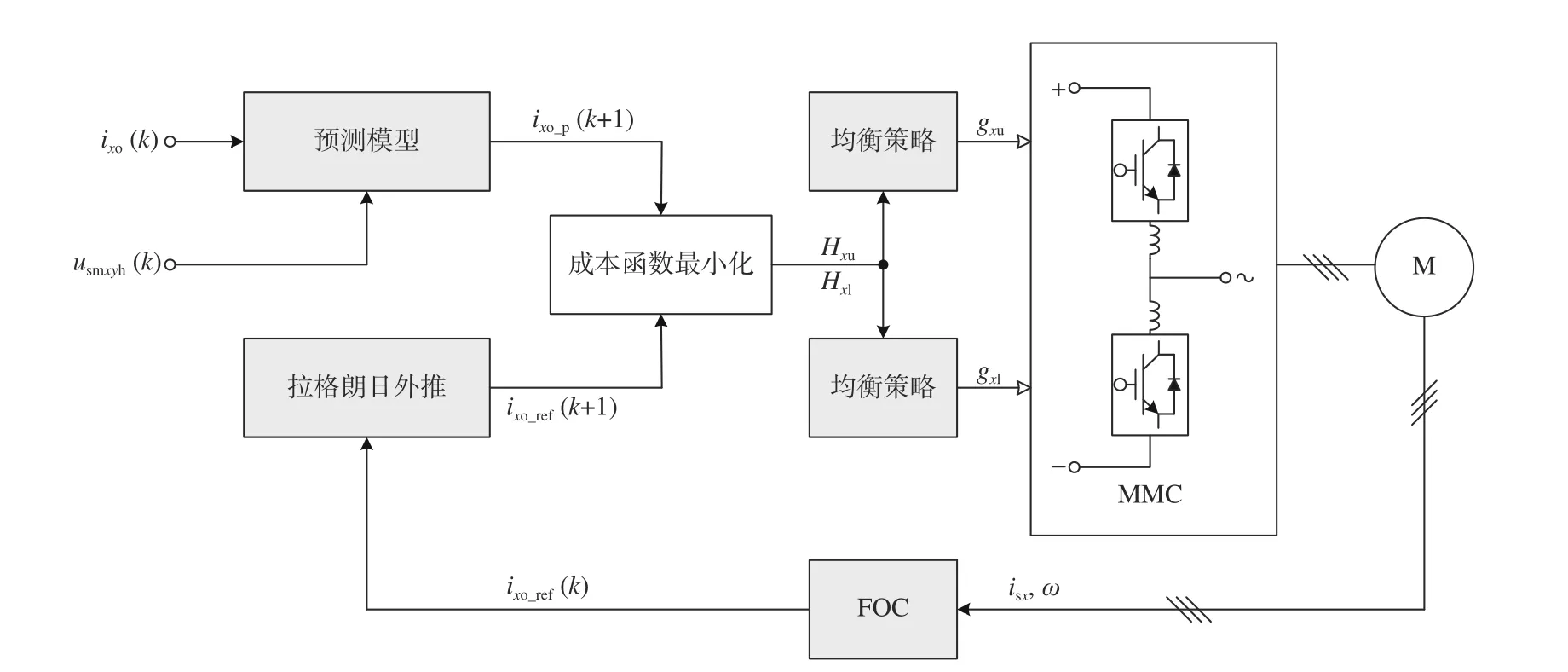
图7 船舶推进系统中MMC 的间接模型预测控制框图Fig. 7 Indirect model predictive control diagram for MMC in the ship propulsion system
由此可见,如果采用模型预测控制,那么整个系统仅需要FOC 的2 个PI 调节器;如果控制目标为2 个(输出电流控制和环流抑制),其中输出电流控制为主控制目标,则整个系统仅需整定3 个参数。如果采用不同的方法来确定控制目标的权重因子,则整个系统仅需整定2 个参数,故可大幅缩减模型预测法的调试时间。
3 船舶推进系统的MMC 模型预测控制
3.1 基于MMC 的船舶推进系统数学模型
图8 所示为图1 系统的驱动部分等效电路,其中永磁同步电机简化为受控源。

图8 船舶推进系统的等效电路Fig. 8 Equivalent circuit of ship propulsion system
根据基尔霍夫电流定律可得:

根据基尔霍夫电压定律可得:

根据式(9),得:

将式(11)代入式(17),则MMC 相间环流的动态方程为

3.2 模型预测算法分析
为了验证本文所提控制方法的有效性,同时简化系统的复杂度,该模型预测(model predictive control,MPC)算法中仅包含了系统的主要控制目标,即输出电流控制。
如果采用单矢量模型预测控制,将造成电机转矩的脉动过大,从而引起电机振动,并对船舶的安全性造成巨大的影响。图9 解释了单矢量造成转矩脉动过大的原因。假设在k时刻(t(k)),变量v的有效值为vk;如果在下一个采样周期Ts仅投入一个矢量,那么变量只能保持增加或减少,从而使得k+1 时刻的变量值为v1;然而,如果在一个采样周期投入多个矢量,则该采样周期内变量vk的有效值将尽量靠近参考值vref,设定k+1 时刻(t(k+1))的变量值为vk+1,k+2 时刻(t(k+2))的变量值为vk+2。

图9 多矢量MPC 的原理Fig. 9 Principle of multiple vector MPC
图9 中,t1,t2和t3分 别 为 一 个 采 样 周 期内3 个不同矢量的投入时间。
因此,采用结合了空间矢量调制优势的三矢量MPC,式(15)可以改写为

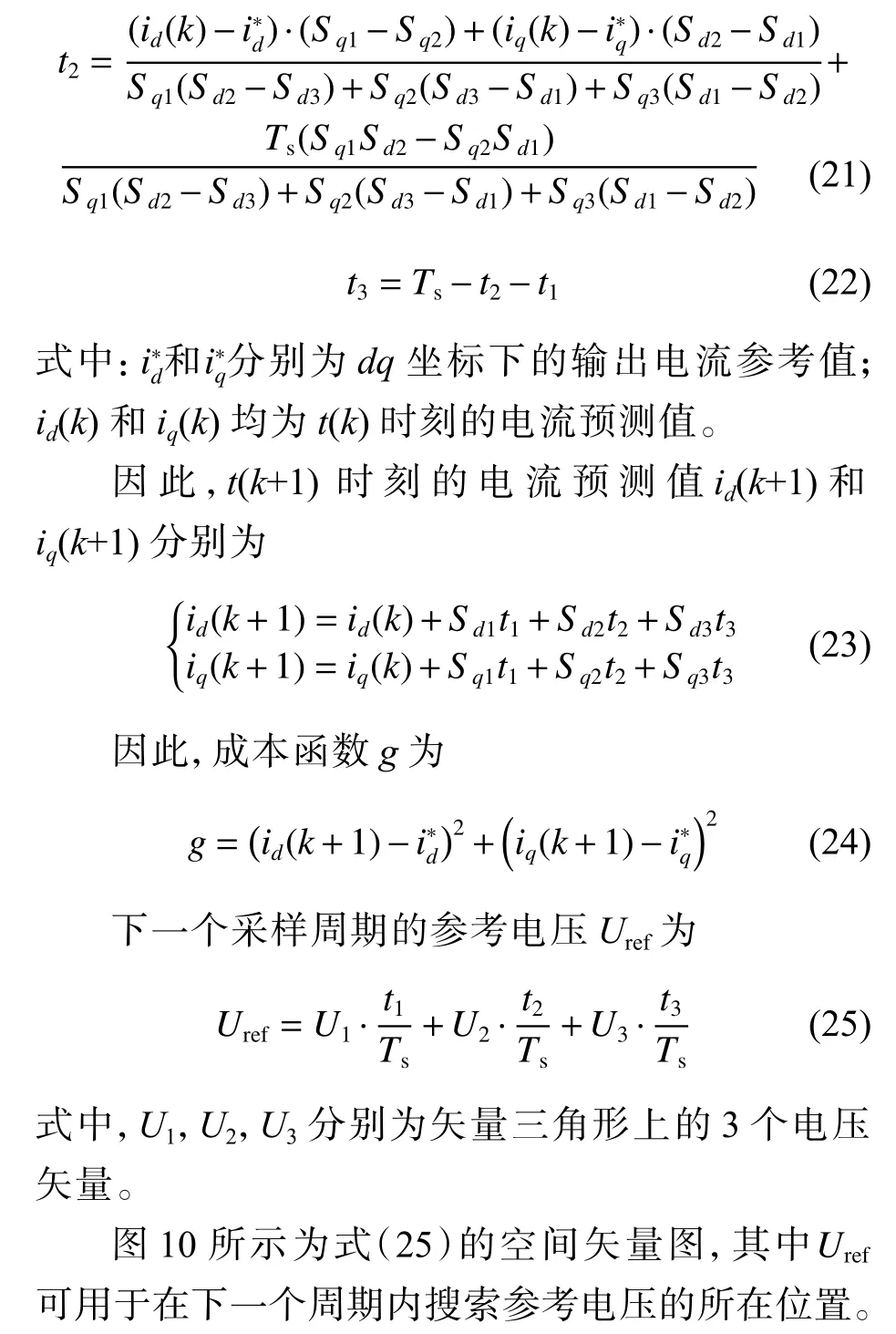
3.3 船舶推进系统的模型预测控制
图11 所示为船舶推进系统的三矢量模型预测控制框图。首先,将参考电压所处的矢量三角型 Δ(图10)施加至3.2 节的MPC 算法中;然后,对MPC 算法的结果tj(t1,t2,t3)进行裁决,如果满足条件,则将矢量三角形 Δ和导通时间tj投入到三矢量顺序控制中,并将结果输出至子模块电容均压控制;最后,输出MMC 各个子模块导通的控制命令。如果MPC 算法的结果裁决不予通过,则将上一次MPC 计算结果的Uref投入到搜寻控制中,从而找到参考电压所在的准确位置,然后再将新矢量三角形Δnew投入到MPC 算法中,此时MPC算法的结果不需要裁决即可投入到三矢量顺序控制。图11 中: Δold和 Δno分别为上一个周期投入的矢量三角形和初始化矢量三角形。

图10 在空间矢量图中确定参考电压所在位置的三角形Fig. 10 Location of reference voltage defined by triangle in space vector diagram

图11 船舶推进系统的三矢量模型预测控制框图Fig. 11 The proposed diagram of three-vector MPC for ship propulsion system
由于不知道初始参考电压值,也不知道初始参考电压在空间矢量图中的具体位置,所以系统控制流程被分为初始化过程和正常迭代过程。在初始化过程中,通过对空间矢量图的所有矢量三角形进行模型预测,即可找到初始参考电压的位置,从而直接进入正常迭代过程,即整个系统仅需要1 次初始化过程,这将大幅减少计算量。
由文献[17]可知,模块化N电平变换器将产生N3个开关矢量,并在空间矢量图中形成6(N-1)2个矢量三角形。因此,根据本文的控制算法,在初始化过程中的计算量为 6(N-1)2次,而初始化结束之后的计算量为1~2 次。
初始化过程如图12 所示,将初始化矢量三角形代入3.2 节的MPC 算法中,选择成本函数最小并满足tj<Ts且tj>0的矢量三角形,将其作为初始矢量所在的位置,最后将所得矢量三角形的3 个矢量及其导通时间投入到MMC 中。
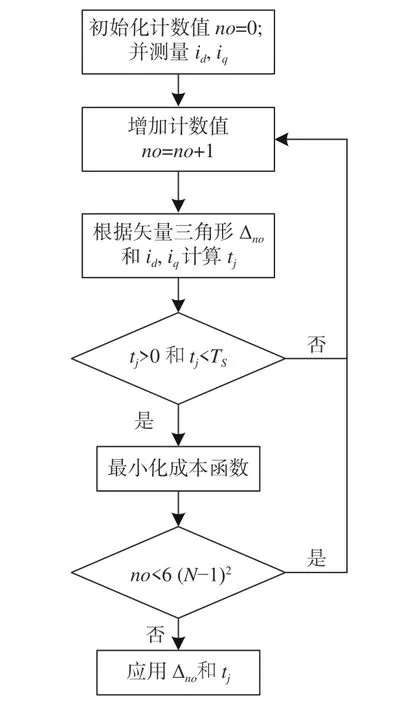
图12 控制策略的初始化流程图Fig. 12 Flowchart of initial program
当完成初始化之后,从下一个周期开始就不再需要初始化。后续控制流程如图13 所示,第1 步:将上一个周期所确定的矢量三角形作为该周期参考电压矢量所在的位置,并代入MPC 算法以计算tj, 如果结果依然满足tj<Ts且tj>0,则再次将这个三角形的3 个矢量和计算所得的tj投入至MMC 中;如果tj不满足约束条件,则进行第2 步。
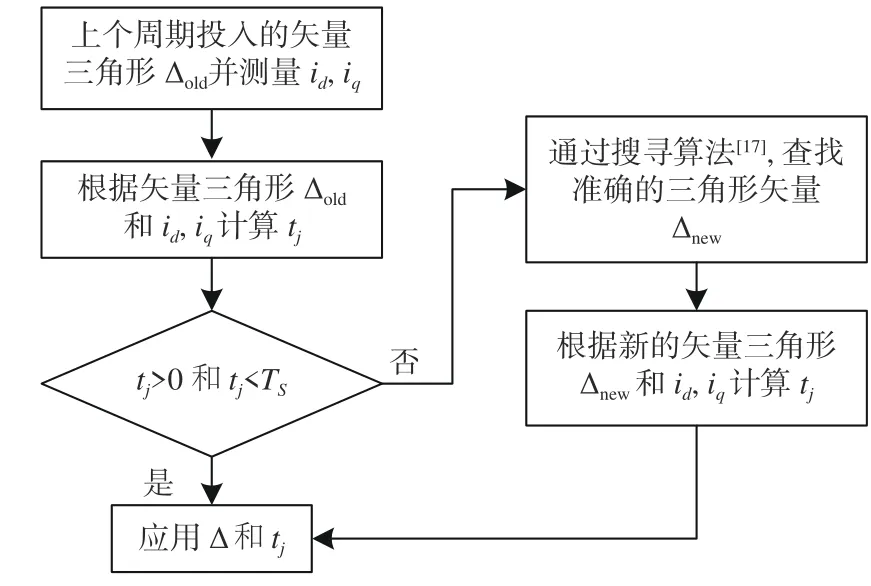
图13 控制策略的流程图Fig. 13 Flowchart of control strategy
第2 步:首先,将上一个周期所确定的参考电压值Uref代入搜寻算法[17]中,查找Uref所在的三角形矢量;然后,再次代入MPC 算法以计算tj,但不用判断tj是否满足约束条件,因为只要搜寻算法找到了正确的三角形矢量,那么MPC 计算所得的tj一定可以满足约束条件;最后,将所得三角形的3 个矢量和计算所得的tj投入MMC 中,待下一个周期再执行第1 步。
4 仿真分析
本文将以某万吨级单桨电力推进船作为母船,在Matlab/Simulink 环境中对推进系统进行仿真,从而分析不同工况下电力推进系统的调速性能以及螺旋桨的负载特性,具体参数如表2 所示。
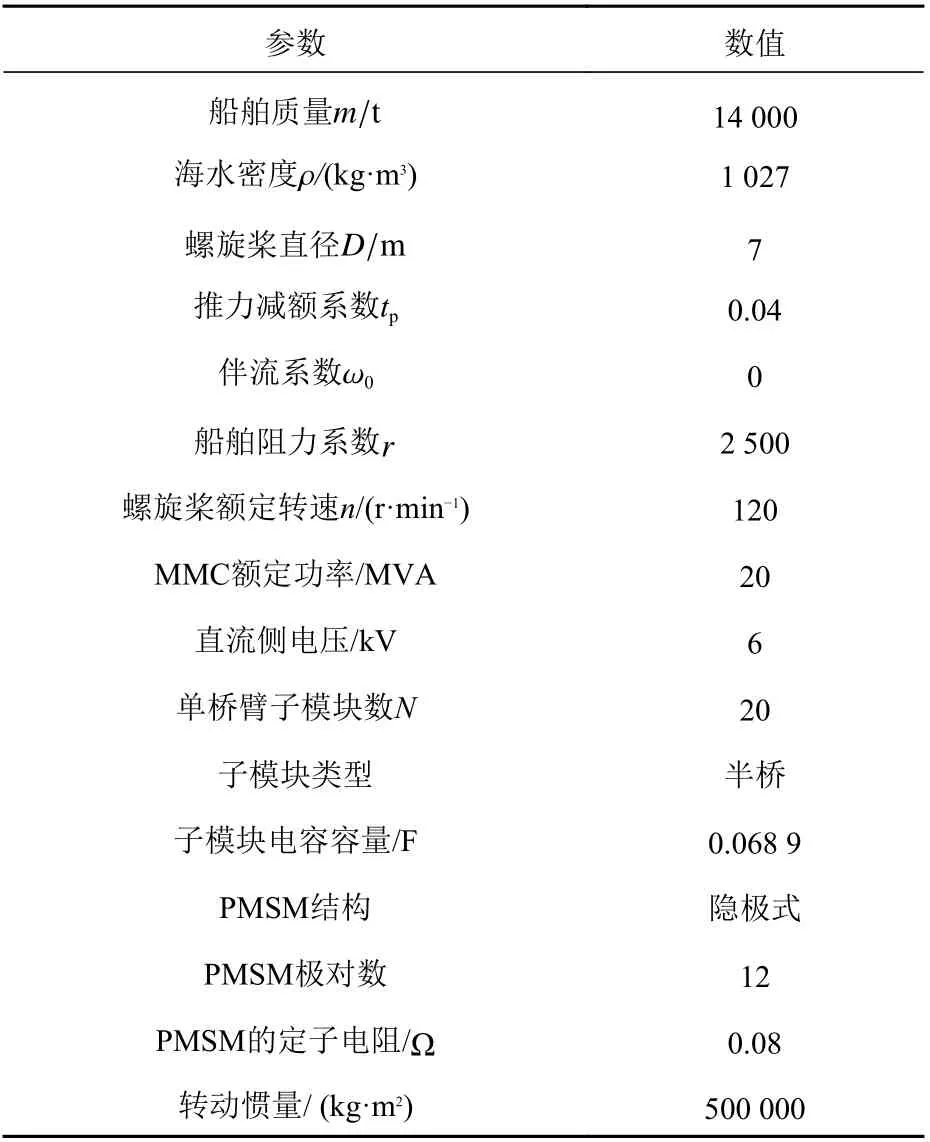
表2 仿真参数Table 2 Simulation parameters
4.1 推进系统正车启动
当推进系统正车启动时,螺旋桨工作在第一象限,即螺旋桨转速与船舶航速的方向相同,仿真结果如图14 所示。图14(a)为正车启动时的螺旋桨转速曲线,系统在2.5 s 内达到额定转速,转速响应无超调,静差率保持在1%之内。图14(b)为正车启动时螺旋桨的转矩Tprop曲线,图14(c)为系统正车启动时电机的电磁转矩Te曲线,图14(d)为系统正车启动时电机的定子电流is_abc曲线。由图14 可知,在该控制策略下,电机启动转矩所致的启动电流较大,其在0.05 s 内维持稳定,并在螺旋桨达到额定转速时保持恒定。

图14 正车启动时的仿真波形Fig. 14 Simulation results of ahead start
4.2 推进系统停车
推进系统停车时,螺旋桨还工作在第一象限,仿真结果如图15 所示。图15(a)为停车时螺旋桨的转速曲线,系统在1.6 s 内的转速降为0 且响应无超调,静差率保持在1%之内。图15(b)为系统停车时螺旋桨的转矩响应曲线。图15(c)为系统停车时电机的电磁转矩曲线,在第3 s 停车瞬间,电磁转矩的波动较大,但在0.05 s 内维持稳定。图15(d)为系统停车时的电机定子电流曲线,在第3 s 停车瞬间,电磁转矩的波动导致了定子电流存在一个阶跃。

图15 停车时的仿真波形Fig. 15 Simulation results of direct stop
4.3 推进系统突加、突减负载
在船舶航行过程中,如果受到风暴影响,则将导致螺旋桨出水,此时螺旋桨提供给推进电机的负载转矩将突然减小。而当破冰船进入冰区航行时,一旦螺旋桨触碰冰层,则将导致推进电机的负载转矩突然增加。图16 所示为系统突加、突减负载的仿真结果。由图16(a)可知,螺旋桨的转速响应无超调,基本维持在额定转速。第2.5 s时,系统正车启动完成,螺旋桨达到额定转速。第2.8 s 时,由于螺旋桨触碰冰层,导致螺旋桨转矩突然增加(图16(b))12%左右,电磁转矩升高(图16(c)),推进电机的定子电流升高(图16(d));螺旋桨转速下降0.15 r/min,并在0.1 s 内稳定。第3.5 s 时,螺旋桨离开冰区,所以导致螺旋桨转矩突然减少12%左右,同时推进电机的定子电流降低,电磁转矩降低,转速升高0.15 r/min,并在0.1 s 内稳定。第4 s 时,由于风浪导致螺旋桨出水,所以螺旋桨转矩突然减少约50%,同时推进电机的定子电流降低,电磁转矩降低,转速升高约0.3 r/min,并在0.1 s 内稳定,转速响应无超调。第4.5 s 时,螺旋桨入水,所以螺旋桨转矩突然增加50%,同时推进电机的定子电流升高,电磁转矩升高,转速降低约0.3 r/min,系统恢复正常运行。
4.4 推进系统负载短路工况
图17 所示为负载三相短路工况的仿真结果。第3 s 时,负载发生三相短路,永磁同步电机的定子电流升高(图17(d)所示)。在短路瞬间,直流侧能量无法通过MMC 传递至电机,所以螺旋桨转速在水的反作用力影响下开始降低(图17(a))。短路之后,螺旋桨将驱动电机转子继续转动,此时推进电机工作在发电机状态(图17(c)),如果不加限制,短路电流将可能烧毁电机,所以第3.1 s 时MMC 和推进电机被断路器隔离,并投入一个电抗器来吸收和限制推进电机的输出能量,这样既可以保护MMC 器件,又可以限制电机的短路电流。第3.1 s 之后,螺旋桨驱动电机转子运转,而推进电机继续保持在发电机状态,在水的反作用力影响下,螺旋桨的转速逐渐下降直至最终停止。
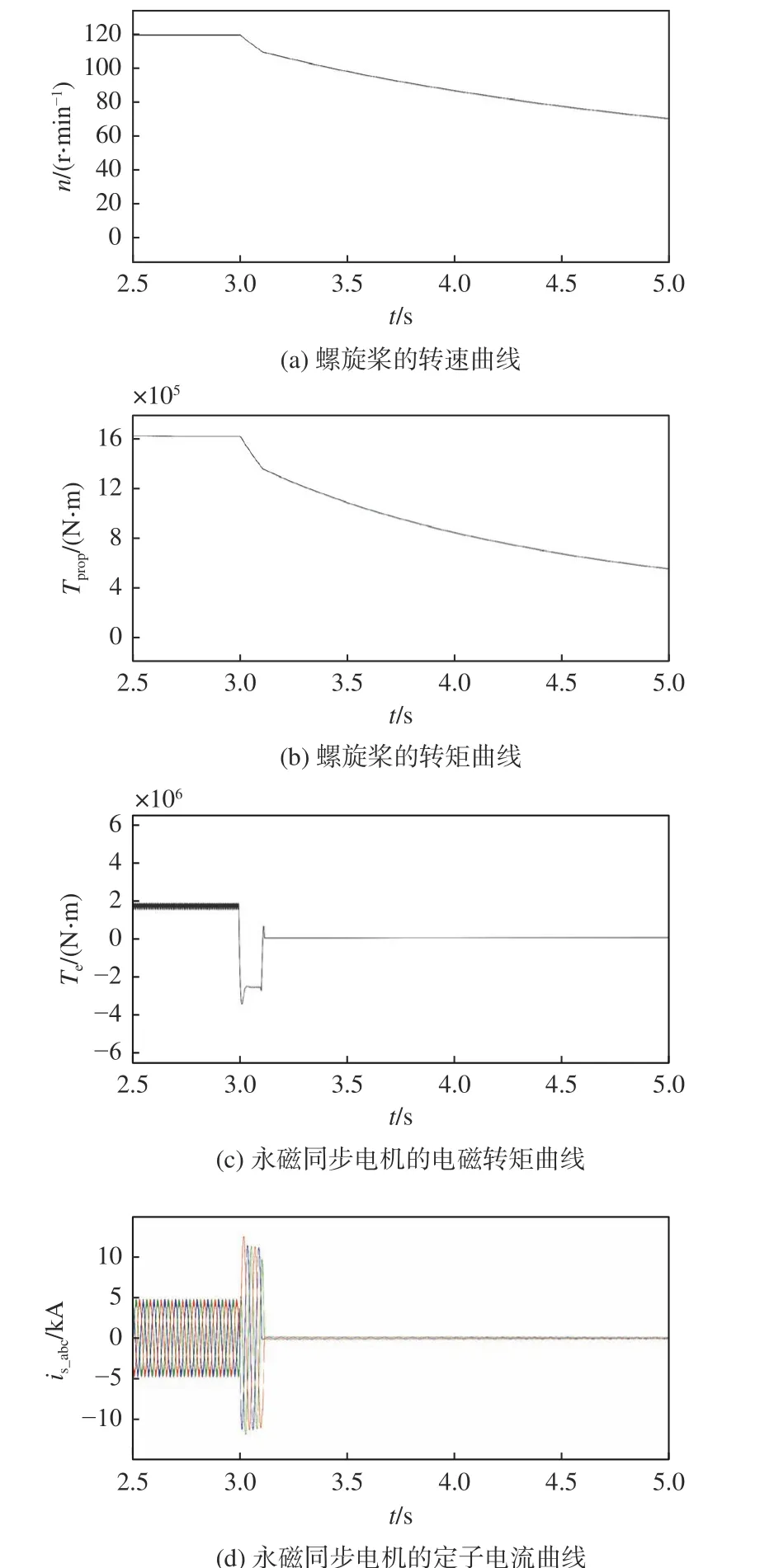
图17 负载三相短路工况的仿真结果Fig. 17 Simulation results of three phase short circuit situation
4.5 对比分析
由2.3 节得知,相较于经典控制策略,本文的模型预测控制策略减少了14 个整定参数。同时,与单矢量模型预测相比,本文的模型预测控制策略显著改善了推进电机的电磁转矩。
图18 和图19 分别为单矢量和三矢量模型预测控制策略下的推进电机电磁转矩响应曲线。第2 s 时,单矢量和三矢量模型预测控制策略下的推进电机电磁转矩的峰值差分别为320 kN 和149.5 kN,此时电磁转矩的平均值为2 960 kN,所以两者的转矩脉动量分别为11%和4.9%。由此可见,三矢量模型预测控制策略下的推进电机转矩脉动减少了6.1%。
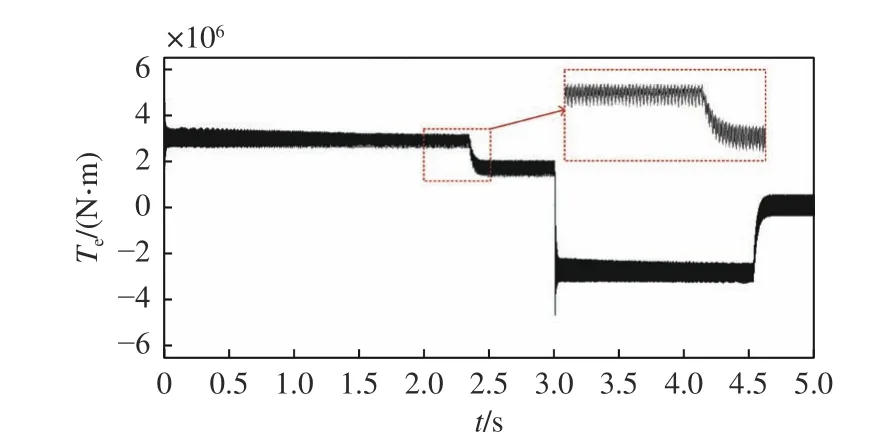
图18 单矢量模型预测控制策略下的永磁同步电机电磁转矩响应曲线Fig. 18 Electromagnetic torque response curve of PMSM based on single vector MPC strategy
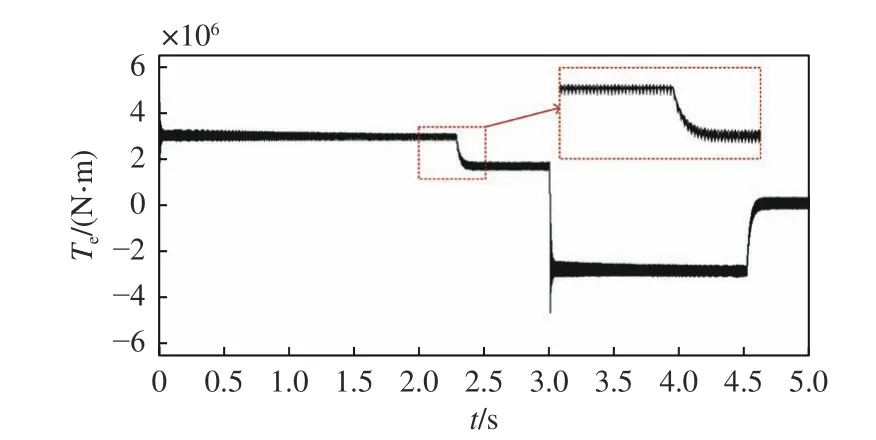
图19 三矢量模型预测控制策略下的永磁同步电机电磁转矩响应曲线Fig. 19 Electromagnetic torque response curve of PMSM based on three vectors MPC strategy
综上所述,本文控制策略下的电机转速和转矩响应无超调,转速静差率保持在1%之内,同时使转矩脉动减少了6.1%,可以满足基于MMC 的船舶永磁推进系统的驱动控制需求。
5 结 语
本文将MMC 应用于船舶中压电力推进驱动系统,并针对其在经典控制策略下的参数整定过于复杂的问题,提出了一种三矢量模型预测控制策略。同时,基于Matlab/Simulink 仿真平台,搭建了带有螺旋桨负载的3.3 kV/20 MW 永磁同步推进电机模型,模拟了推进电机的启/停过程,仿真结果表明:本文控制策略下的转速静差率保持在1%之内,转矩脉动减少了6.1%,该方法具备可行性和明显优势。
需注意的是,虽然本文解决了经典控制策略下的参数整定过于复杂的问题,以及直接模型预测所致的电机转矩脉动过大的问题,但也导致了系统启动瞬间的定子电流过大。此外,为了减少控制系统的复杂性,本文没有考虑环流抑制环节,这些问题将在后续研究工作中进一步落实解决。
