动车组主要关键部件安装状态图像检测系统的设计与实现
2021-08-30任朝阳杜锦程申孝周刘耀华刘庆庆
任朝阳,杜锦程,申孝周,刘耀华,张 钦,高 佶,刘庆庆,关 琦
(中国铁路南昌局集团有限公司,江西 南昌 330000)
在动车所一级修更换制动盘左右两侧的到限闸片时,存在因闸片安装不到位导致其卡扣未卡死,使得闸片处于松动状态的安全风险隐患,由于动车组运行过程中启停、振动等因素,可能导致卡扣弹起后闸片脱落的安全事故(图1)。另外,动车组的裙板三角锁、底板螺栓的类型、数量较多,体积小,存在人工复核遗漏的安全隐患,若动车组出库时三角锁、底板螺栓松动,则运行中裙板、底板有可能掉落,严重危及动车组运行安全。
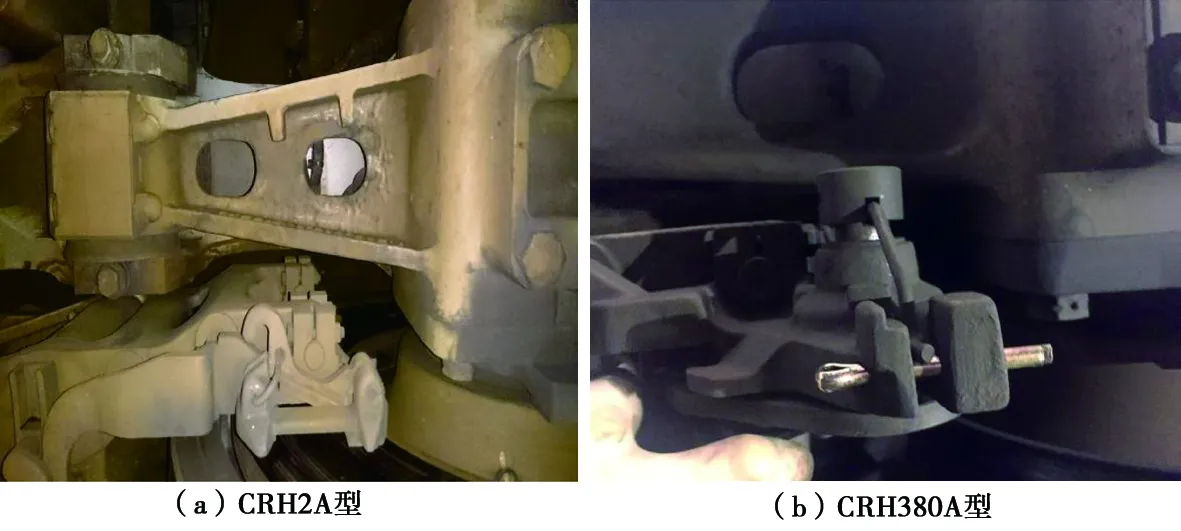
图1 闸片丢失故障案例
安装在动车所检查库至存车场之间出入库咽喉处的动车组关键部件安装状态图像检测系统(SEDS),运用高分辨率相机可对动车组的重点关键区域进行成像,通过机器视觉算法在图像中对重点部件的特征进行测量分析,能更好地检测、复核动车组一、二级修作业后出库闸片、裙板三角锁及底板螺栓的检修质量和状态,可在动车组出所上线运行前消除安全隐患,最大程度避免人为失误造成的漏检漏修,对动车组安全形成“双保险”。
1 系统整体设计
SEDS系统主要由三部分构成:轨边探测设备、轨边机房设备和监控中心设备。该系统底部安装7台相机,侧部安装5台相机。为了精准抓拍动车组各个关键部位高清图像,轨边相机的布局方式以抓拍到部件的高清特征图像为准,底部以动车组动车和拖车闸片位置为图像中心,侧部以裙板三角锁为图像中心,并且采用高分辨率镜头以提高图像质量,提高自动识别的准确率,降低误报率。
报警终端设计方面,识别算法可以直接描述故障发生的位置并显示此图,分析员只需要复核确认即可(图2)。为了方便分析员直观地定位故障点,报警终端只提供了左侧裙板、右侧裙板、底中通道的整车浏览界面,用于映射报警故障点,其他通道图像只用于自动识别。

图2 报警终端
2 系统实现
系统检测对象为CRH380A、CRH2A型动车组,检测过程为全自动检测。主要功能为:
(1) 检测闸片安装是否到位,系统可以高精度地检测出各个闸片的安装状态,最大程度地避免人为疏忽造成的安全隐患;
(2) 检测裙板三角锁锁闭是否到位;
(3) 检测空调蒸发器/冷凝器底板螺栓是否丢失;
(4) 系统具有车号识别索引功能,可以准确地识别出动车组编组号。
识别一个部件,主要解决2个问题:首先,要准确地在图像中定位出需要识别的局部区域(ROI);其次,在局部区域中,通过对目标部件的图像特征设计识别算法。下面通过2个故障识别点进行分析说明。
2.1 三角锁锁闭不到位故障识别
系统拍摄的三角锁图像分布在左右侧部上相机视场内,各个三角锁高度基本一致。将2个相机拍摄的图像沿纵向以辆为单位拼接成大图,沿横向截取宽度为600像素的条状区域(图3中2条红线之间的区域),所有的三角锁均在该区域中。
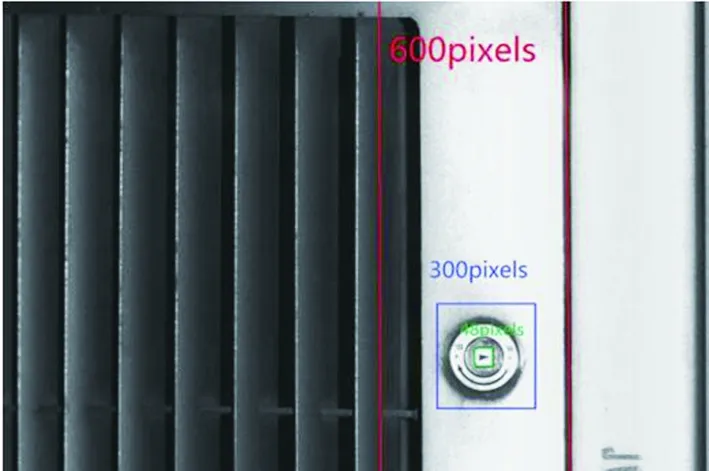
图3 三角锁区域定位示意图
截取以三角锁中心为原点的300像素宽的正方形区域作为识别目标及正样本,其他任意区域的300像素宽的区域为负样本,提取方向梯度直方图特征(HOG特征),作用是将二维灰度图像通过提取梯度信息并进行编码后转换为一个一维特征向量。
将正负样本进行标记(label),正样本的label为1,负样本为-1。把特征向量及label送入支持向量机(SVM)中进行训练,得到模型文件。线上运行时,根据三角锁之间的距离等先验知识进行定位框筛选(图4),得到每一个三角锁区域的局部图像(图3中蓝色框)。
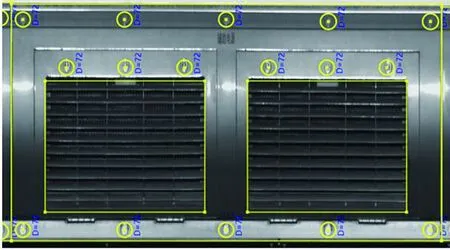
图4 三角锁定位框筛选
由于最终目标是获取三角锁的精确位置(图3中绿色框),故在蓝色框区域基础上,以完全准确位置的三角锁图像为正样本,以其他位置的图像为负样本,再次进行训练,得到模型文件。在线运行时,可进一步得到三角锁的精确位置,最终得到三角锁局部图像(图3中绿色框)。
得到三角锁区域后进行识别,将正确位置的三角锁定义为正样本,旋转超过一定角度(如30°)的三角锁定义为负样本(图5),并送入SVM进行训练,得到用于识别(分类)的模型文件。线上运行时,经过前面的定位过程,即可对三角锁是否有明显旋转进行判断。

图5 三角锁典型正负样本图例
2.2 闸片区域部件识别
闸片及附属件的识别首先也是要解决部件局部的定位问题。不同于裙板三角锁,底部转向架部分部件多,同时存在一定光干扰,给定位工作带来较大难度,需要充分利用已有的列车相关信息缩小定位范围。
由于闸片及附属件的主要作用是列车制动,因此确定车轮(或车轴)在图像中的位置会非常有利于闸片相关部件位置的确定。如图6所示,选取2条红色直线之间的局部区域,根据光线因素,车轮位置的局部像素值很高,同时根据侧部与底部图像存在的同步扫描对应关系,则对于转向架区域,车轴的位置也随之被确定。
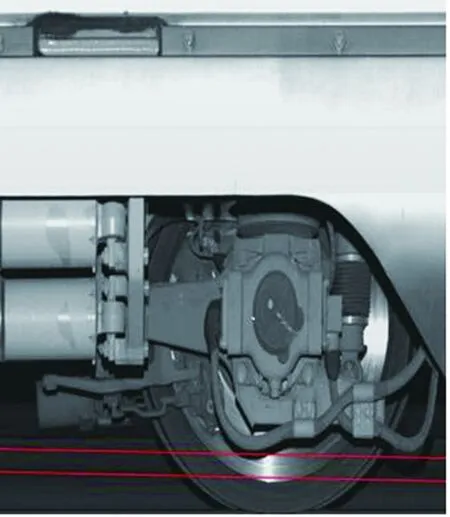
图6 车轮位置的确定
对于底部不同通道的图像,每一个通道均有其关注的闸片位置。闸片相关部件所在区域沿车轴方向基本固定,纵向在车轴上下划分出一个固定范围,使得需要识别的区域不超过该范围(图7)。

图7 底部识别范围
下一步就是如何精细地确定各重要部件的位置。首先选取一局部区域作为基准定位区域,该区域要有足够的辨识度,在闸片故障前后变化要尽可能小。经过试验,选取图8中绿色框局部区域作为定位基准区域。以大量过车图像中的基准定位区域为正样本,以识别范围内其他位置的区域作为负样本,提取HOG特征并送入SVM中进行训练,得到模型文件。线上运行时,结合模型文件精准定位基准区域后,由于关注的部件与基准区域之间的相对位置关系是固定的,最终可以得到重要部件局部图像。

图8 CRH380A车型卡簧钩定位示意图
针对传统的HOG特征结合SVM分类器的算法在闸片重要部件上识别故障时存在误报率高、漏报情况也较多的问题,本系统将深度学习技术应用于故障图像的识别中,具体应用为基于keras框架下的VGG16深度网络进行重要部件图像特征的提取,采用KNN分类器作为判断算法。在一辆车的图像中,每一个通道不同部位的部件识别结果汇总成一个一维向量存于一个文本文件中,无故障判断为1,有故障判断为-1。
对于CRH2A型锁簧(图7(b)红色框部分),VGG16结合KNN算法依然会偶尔存在漏报现象。为解决该问题,在之前对该区域的定位基础上,观察锁簧结构(图9(a))可知,由于光照的原因,锁簧附近会存在一个稳定的阴影区域,将图像二值化(图9(b))得到阴影部分(图9(c)),再寻找包围阴影部分的最小矩形(图9(d)),计算最后矩形的长边的斜率(图9(e)),就可以获得锁簧的角度信息。若锁簧有明显旋转,则斜率亦会有较大变化。
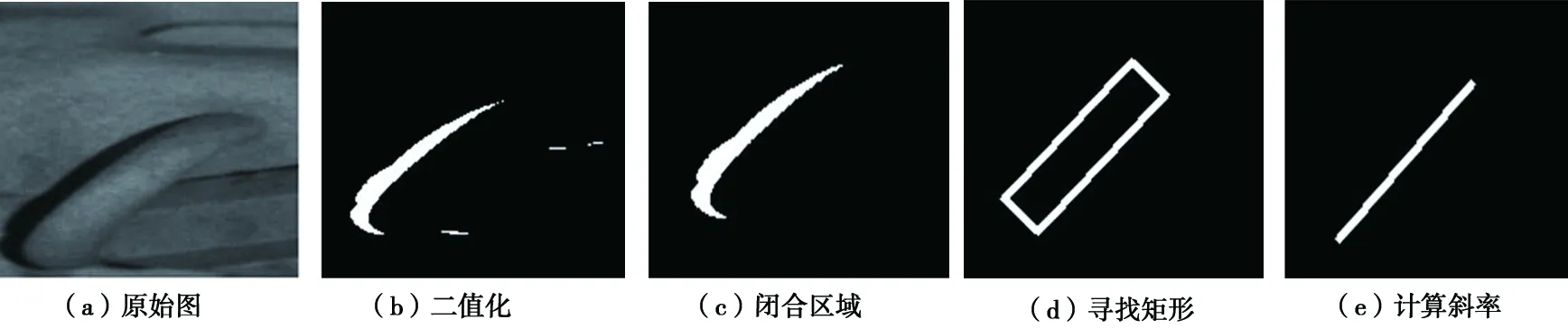
图9 锁簧旋转情况识别过程
3 试验数据分析
2017年8月1日—12月30日,利用南昌车辆段南昌西动车所配属的动车组,对安装在南昌西动车所出入库咽喉处的SEDS系统进行测试。
测试步骤:(1)预设故障,在动车组的重点部件(裙板三角锁、闸片、闸片安装托及底板螺栓)设置模拟真实故障(表1);(2)该动车组出库完全通过SEDS设备;(3)测试完毕后,排除预设故障。
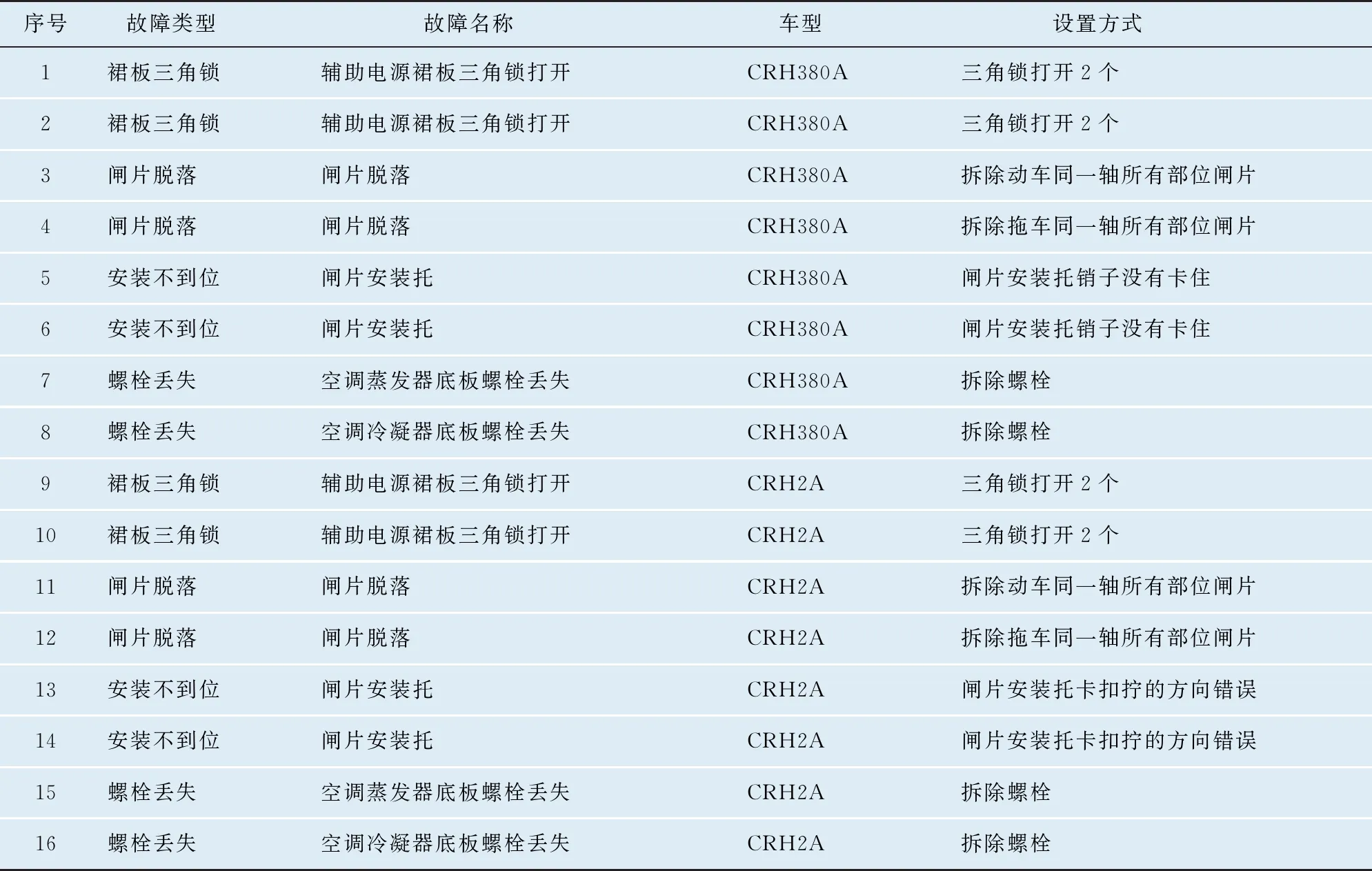
表1 预设故障表
通过5个多月的模拟故障及测试结果分析,积累了大量故障样本,随着故障样本积累的逐渐增多,通过故障样本训练,从10月份开始识别算法趋于稳定,故障识别兑现率达到50%以上,基本实现零漏报。在设备试用过程中,室外相机受环境影响,拍摄的图像质量有所下降,导致误报率有一定程度的升高,定期维护可以提高拍摄图像质量,降低误报率。测试数据统计结果如图10~图12所示。
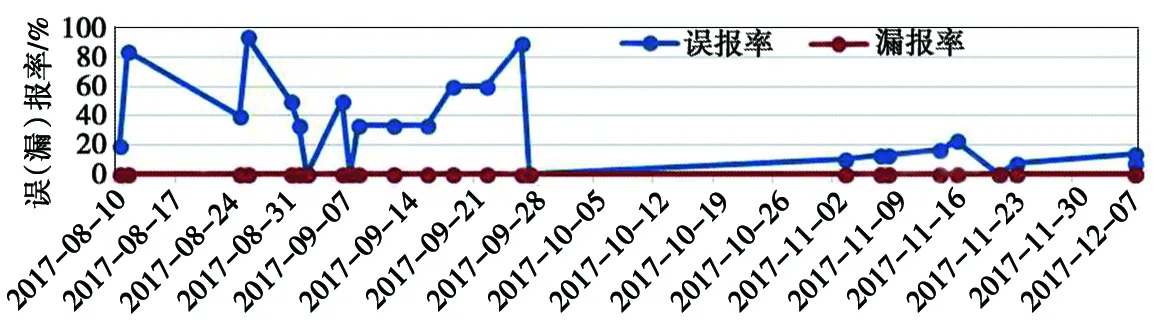
图10 三角锁识别情况

图11 CRH380A闸片识别情况
4 总结
SEDS系统在试运用期间,获得了大量的故障样本,目前完成了动车组裙板三角锁安装不到位、闸片丢失、闸片附件安装不到位、空调蒸发器/冷凝器底板螺栓丢失等故障的自动识别,以后将逐步实现各关键部位故障的自动识别、报警,实现全自动动车组可视部位的一级修故障检测。
SEDS系统的应用推广将有利于提高动车组检修作业质量,由“人防”向“技防”转变,且安全责任可追溯,提升动车组检修安全保障能力及管理能力。
