基于智能机械臂的脉象采集分析系统的研究∗
2021-08-28黄村坤周会林王学民
苏 昊,黄村坤,周会林,王学民∗
(1.天津大学精密仪器与光电子工程学院,天津 300072;2.上海道生医疗科技有限公司,上海 201203)
中医理论分为望、闻、问、切四诊,其中脉诊是在经络学基础上发展起来的,作为最能体现临床病症体征的手段,长期的实践证明中医通过脉象诊断疾病是科学有效的,并且在今天脉诊也是中医临床最主要的诊断手段[1]。然而中医师以手指按压寸口位置的方法来获取脉象感受来诊病的方法,然而这种方法具有“心中了了,指下难明”的特点,这使得中医脉诊的学习变得困难,从而限制了中医学的传承和发展,因此我们需要运用现代工程技术方法分析脉搏信号特点并将其客观化、标准化。近年来中医脉诊仪设备得到了广泛发展,各种大学与研究机构推出了多种脉象采集设备[2],如2011年,兰州理工大学的党宏智等研制了手动加压的寸关尺脉搏信息检测系统[3],2012年,天津大学王学民等设计了基于柔性阵列传感器的脉象检测系统[4],2014年,华南理工大学的周侃恒等人设计了新型三通道自增压脉象采集系统[5]。这些脉象采集系统都存在一些缺点,它们往往需要用户在专业医护人员的帮助下才能够找到准确的采脉位置,这就在很大程度上限制了脉诊仪的推广,此外手动加压模式和腕带固定方式会使软组织变形,对脉象精度也有影响。
因此,本文结合中医脉诊理论,运用智能机械臂的空间灵活性,与新型传感器结合进行智能寻脉,并与微型气泵结合进行智能加减压,在此基础上设计了基于智能机械臂的脉象诊断系统,不仅可以大大降低用户的使用门槛,还可以采集到更加全面的脉象信息,改善了现有的脉象采集设备的弊端,并且为智能中医技术以及远程医疗提供更加准确的信息支撑。
1 系统的整体设计
系统通过下位机系统来控制智能机械臂的移动,通过传感器末端采集的动静压反馈来实现控制机械臂寻找取脉位点,再将取脉位点的数据采集上传至上位机进行显示和处理。系统的整体原理框图如图1所示。

图1 系统整体框图
本系统采用基于ARM Cortex_M3内核的微控制器STM32F103VET6进行脉象信号的采集、分析和传输,以及机械臂的移动控制,该微处理器集成度高,封装小,内部集成了AD转换器和USB接口模块[6]。采用儒为压力传感器固定于机械臂末端进行脉象信号的采集,将采集的信号进行放大滤波处理,使信号输出能够调整到单片机AD采集电压范围。
通过ARM微处理器对智能机械臂进行二次开发,对机械臂发送移动命令,运用ARM微处理器自身的AD转换器将模拟信号转换为数字信号,根据检测到静压调整机械臂找到手腕位置,然后控制压力控制模块进行加减压,根据动压大小找到正确取脉位点,采集脉象信息。同时为了提高采集效率,在ARM的内存空间开辟4KB的数据缓存区,每次A/D转换结束后,通过DMA技术,将ADC转换的12位数据顺序搬移到数据缓冲区中,待缓冲区满后,通过USB通信方式将脉象数据发送到上位机,上位机软件实时显示脉象波形、脉率和压力等参数。
2 机械臂寻脉控制系统
2.1 机械臂参数介绍
本系统使用的是越疆者公司的DOBOT机械臂,它具有丰富的I/O扩展接口,本系统使用它的扩展接口与单片机连接进行二次开发,使用自带二次开发通讯协议进行程序的编写,并通过调用机械臂命令函数实现机械臂的回零、运动模式的设置和末端坐标在四个自由度的移动[7]。DOBOT机械臂使用的笛卡尔坐标系是以机械臂底座为参照确定的坐标系,如图2所示,坐标系原点为大臂、小臂以及底座三个电机三轴的交点,X轴方向垂直于固定底座向前,Y轴方向垂直于固定底座向左,Z轴符合右手定则,垂直向上为正方向。机械臂最大伸展距离为320 mm,重复定位精度为0.2 mm,能够满足机械臂在脉诊范围内寻脉的移动,0.2 mm的定位精度也能保证在手腕寸口长度(3.76±0.34)cm范围内移动微小距离从而找到最佳取脉位点。

图2 机械臂坐标系
2.2 机械臂寻脉的实现过程
设计微型气囊接口固定传感器与机械臂末端中心,同时,导管连接传感器和气泵负责在取脉过程中加压,实物图如图3所示。系统中机械臂与脉诊的相对位置如图4所示,机械臂下侧沿与脉枕上沿距离为10 cm。机械臂和患者手的相对位置的确定保证了本系统的机械臂三维位点坐标设定的实现。

图3 机械臂末端传感器实物图

图4 机械臂与脉枕相对位置
在各设备位置相对固定的情况下,首先确定机械臂寻脉的初始位置,以固定的初始位置开始沿着手腕寻找桡动脉位点。该系统设定起始点如图5圈出位置正上方,根据我们的多次测量确定了机械臂的初始位点,这个初始位点偏下一点,因为我们5点寻脉法的寻脉范围是30 mm,大于成年人的桡动脉范围,这样保证机械臂不会漏过最佳取脉点,机械臂末端传感器与手腕距离100 mm处为初始位点的z坐标。患者将手腕放置在脉枕上,手腕处能够看到明显的分界线,这条线在中医学上叫鱼际横纹,将鱼际横纹和手腕内侧虎口交界点处放在脉枕长边中间处,不论有没有中医知识都能顺利找到参考点,并将手腕放在固定位置。

图5 手腕放置位置图
根据«难经»记载的寸关尺的长度和位置可知,关为寸尺分界点,寸口脉长一寸九分,可分析出寸关尺三部等长。吴培总结大量寸关尺测量结果[8]并将之与传统中医书籍中寸口脉长度对比,得出现代成年人寸关尺长度为(3.16±0.43)cm较为合理,依据人的身高不同有所调整[9]。本系统以此为依据来对寸关尺的取脉位点进行定位。
机械臂在测得静压值大于0.1时判断触碰到手腕停止下移,使用单片机IO口打开气泵开始加压,同时单片机采集动压值,每次采集的动压在中断函数中和上一个数据比较,保存最大的动压数据及取得该动压的机械臂坐标,每次采集10 s信号后机械臂上移并移动到下一个点再进行测量,最终记录的取最大动压值时机械臂的位置坐标即最佳取脉压力点,也即我们寻找的取脉点。
机械臂智能五点寻脉算法过程如图6所示,首先从初始位点X坐标加5 mm,由寸口脉起于鱼际横线后一分,Y坐标减5 mm,此为寻脉采集第一个点,打开AD,同时给机械臂发送下降指令,让机械臂按一定长度下降,当传感器接触到手腕时静压值会有变化,当静压大于0.1时停止机械臂下移的指令,打开加减压模块施加压力采集动压信号并储存在变量数组中,提取并记录动压最大值作为变量,并保存机械臂在此时的坐标值。采集该位置脉象30 s后,以传感器的半径5 mm作为步长,依次沿X轴方向移动4次,共得到5个点,依次对比这5个点最大脉象动压数值,最后保存最大动压峰值处机械臂末端坐标数值,确定此点为寸部最佳取脉位点,并再次移动至该坐标点进行脉象复采集。依此方法以寸部最佳取脉位点为参考点向关部移动12 mm作为关部取脉的起始点,再以5点寻脉法采集该参考点的数据和这个参考点左右各两个点共五个点的数据,两点间的间隔为5 mm,尺部的取脉方法和关部相同。机械臂开启后会由单片机控制进行上述操作,自动寻脉。最后通过串口向上位机上传记录的最佳取脉位点的脉象数据,进行后续处理。

图6 智能五点寻脉算法流程图
3 脉象信号分析
为验证本机械臂寻脉系统脉象信息采集的准确性,对本脉象采集设备与市面上的脉诊设备进行数据对比。
3.1 最佳取脉压力获取
在中医脉诊中,中医师使用指腹对患者寸关尺三部进行加压,通过指腹感知脉搏波来获取患者生理病理信息,中医师往往会不断调整指腹压力,直至能够感知到一个最明显的脉搏波动,此时指腹施加的压力即为最佳取脉压力,此时的脉搏波信号最明显[10]。
在使用传感器对桡动脉正向施压过程中,传感器对皮肤的力与软组织和桡动脉的回弹力是相反的,采集过程会有很大的干扰,而在减压过程中,减压方向与回弹力方向一致,能够在一定程度上减少时间漂移和压力漂移。为了获取最佳取脉压力,在找到取脉位点时,本脉诊设备加减压模块使用气泵模拟中医师的指腹对桡动脉加压,通过分析减压过程中的脉象数据的变化即可得到最佳取脉压力[11]。
3.2 脉象数据特征
通过脉象时域特征图即图7可以直观地认识脉搏波,脉搏波动的强度可以由信号幅值表现出来,时间参数则可以表现出脉率以及节数等特征脉象,脉象时域特征参数如表1所示。

图7 脉象数据特征图

表1 脉象时域特征参数及其表征含义
3.3 数据处理
通过脉象仪得到脉象数据容易受到外部条件的干扰,为了得到便于分析的脉象数据,需要对我们得到的信号进行去除高频噪声和基线漂移。
去除基线漂移采用的是基于三次样条插值的LPIP算法[12-13],通过找到每一个周期的最小值点作为起点,所有起点拟合出基线,原始脉象信号减去基线就能得到去除基线漂移的脉象信号,如图8所示。

图8 去基线漂移前后的脉象信号
高频去噪选用的是小波去噪的方法,选用db6小波对信号进行分解,消除20 Hz以上的信号以实现高频去噪[14],去噪后的脉象信号如图9所示。

图9 高频去噪后脉象信号
最后,通过ILP算法进行特征参数的提取[15-16]。该算法的核心思想是根据每个周期内每个幅值和脉象信号的交点个数的变化规律,当在某个幅值处出现突变时该幅值就是一个特征参数,得到的特征参数如图10所示。

图10 时域特征参数
4 实验及数据分析
4.1 寻脉位点验证实验
为了验证本机械臂的智能五点寻脉法是否能够成功找到最佳取脉位点,本系统使用脉象复放设备进行验证,脉象复放设备主要由脉象发生器、仿生模拟手组成,仿生手以成年男子的手为模型制作,内部有仿生骨架、人造动脉血管以及仿生表皮,人造血管的厚度、柔韧度以和位置都与真实人手脉管很接近,仿生手的结构如图11所示。

图11 仿生手
将脉象复放设备和机械臂采集设备固定,打开脉象复放设备,稳定之后打开机械臂,机械臂会按照设计的算法自动寻脉,寻脉时记录寸关尺各部的最佳取脉压力点,将仿生手的表皮去掉,可以明显的看到传感器压在了人造动脉血管上。同时,请一位有经验的中医进行取脉,取脉之后在人造手臂上进行标记,用激光笔照向标记点,去掉人造手臂表皮,可以看到老中医确定的取脉点和我们的智能机械臂找到的取脉点相同,如图12所示。

图12 中医师确定的取脉点
为了验证机械臂寻脉的可靠性,用机械臂进行10次寻脉,每一次传感器都能压在人造动脉血管上,和中医师确定的取脉点一致。证明本系统可以精准的找到最佳取脉位点,图13~图15是实验中的一组寸关尺寻脉结果图。
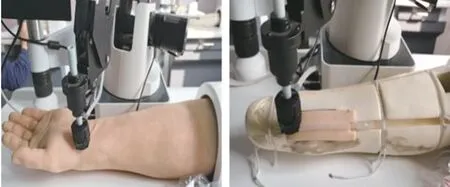
图13 寸部最佳取脉位点

图14 关部最佳取脉位点

图15 尺部最佳取脉位点
4.2 对比实验
为验证本脉诊设备在找到最佳取脉位点后所采集脉象信息的准确性,将本脉诊设备与市面上最常见的芜湖圣美孚科技有限公司研发的SMF-Ⅲ増强型中医综合诊断系统进行数据对比实验,以下称该设备为标准脉诊设备。并在本脉诊设备采集的最佳取脉位点进行标记,使用标准设备在同一位点进行脉象采集。
实验对象:选取二十名天津大学20至25岁的健康在校大学生进行数据采集,男女各十名。
实验前准备:数据采集时间定于上午,排除数据因实验对象饮食活动等因素的干扰,安排所有受试者在数据采集前静坐2 min,将手臂平放于脉枕上,机械臂置于起始点上方。
实验步骤:①启动机械臂,开始移动寻找寸部脉象,第一轮五点寻脉之后确定最佳寸部脉象坐标。并使用记号笔在手腕标记位置。②机械臂移动至最佳寸部脉象处,传感器在连续慢减压模式下采集脉象数据并寻找最佳取脉压力,待信号稳定后截取最佳取脉压力下的脉象数据,采用相同的方法得到关和尺部的脉象数据。③使用标准脉诊设备在手腕标记部位采集,寻找寸关尺三部的最佳取脉压力。④使用标准脉诊设备,加压至最佳取脉压力,待信号稳定后截取脉象数据。
4.3 实验数据对比
对二十组数据以寸部为例进行分析,分别获得各组数据的最佳取脉压力均值以及方差,如表2所示,对数据做等方差假设的t检验分析,结果如表3所示,两系统所获取的最优取脉压力均值基本上无明显区别,显著性水平P高于0.05,两种系统在同一取脉位点获取的取脉压力数据在统计学上差异不显著,证明了本系统在最佳取脉位点采集数据的可靠性。

表2 两组最优取脉压力值

表3 最优取脉压力t-检验结果
对比标准系统和本寻脉系统下得到的脉象数据,选取时域特征参数中比较有代表性的h1,h3,h5和t,分析两种系统下20名学生这些特征参数的平均值,结果如图16所示。

图16 时域特征值对比
两个系统所采集的数据无显著性差异,验证基于智能机械臂的脉象诊断系统所采集的数据是真实可靠的。
5 结论
本文通过分析现有脉象设备的不足之处,设计出一种全新的脉象采集方式,由对腕部寸口脉的位置的文献分析确定智能寻脉的固定的坐标起点,并利用智能机械臂的二次嵌入式开发与脉象采集反馈系统联系起来实现智能五点寻脉法。并且通过设计对比实验,通过数据时域参数的相关性分析,验证了智能寻脉系统所采集的脉象信号真实可靠性,为现阶段的脉诊采集设备提供了一种全新的方式,大大降低脉诊设备的损耗率,并降低了脉象设备对用户的使用门槛,无需自己找到脉位去采集,为脉象设备与人工智能和远程医疗的结合提供了新的思路和技术支持。
