电动小车坡道起步系统的研究
2021-08-24王恩泽霍艳忠
杨 楠 王恩泽 霍艳忠
(佳木斯大学 信息电子技术学院,佳木斯 154007)
1 系统设计
如图1所示,该设计采用STM32G4 MCU单片机作为电机的控制单元[1]。该款单片机资源丰富,内置运行速度可达170 MHz的32位ARM® Cortex®-M4内核(支持FPU和DSP指令集)与两种不同的硬件加速器——程序执行加速器和数学运算加速器,数据处理速度可达微秒级,大大提高了电机的转角精度和控制精度。L9110S为控制和驱动电机设计的双通道推挽式功率放大专用集成电路器件[2],将分立电路集成在单片机IC中,使外围器件成本降低。内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管中的整机可靠性提高。N20减速电机的减速比为1:100,电压为6 V,具有体积小、扭矩大的特点[3];齿轮减速模块组合的传动比分级细密,传动效率高,耗能低,性能优越。

图1 系统总体框图
1.1 智能小车外围设计
智能小车采用独立双轮驱动模式,前轮固定不动作,为从动轮提供支点,后轮驱动。控制转向时以前轮中心为中心点,后轮驱动提供扭矩转向,使小车沿标记线行驶。普通万向轮只适应于干净平整的地面,不适用于坡道定点停车的要求,所以需要使用3D打印为电动小车定制车轮。车轮表面包裹塑料泡沫减震[4],通过控制左右驱动轮的转速差,实现前进、后退和转向等各种基本动作。当旋转半径为零时,由于小车能绕轮距中心旋转,因此十分有利于在狭窄场所中改变方向。智能小车样车图,如图2所示。
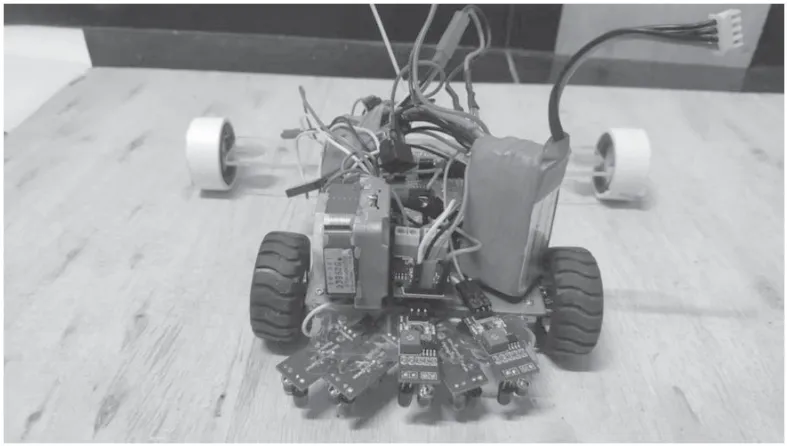
图2 智能小车样车图
1.2 控制器设计
STM32G4作为控制器,通过控制算法将模拟信号转化为能被控制器识别的数字信号。单片机控制信号的变化完全依靠硬件计数,完成运算后将计算结果转化为脉冲宽度调制(Pulse Width Modulation,PWM)信号输出到电机。
由于在上坡过程中车辆需要提供足够的驱动力控制速度,通常不需要额外的制动力,可以利用模糊PID控制器,实现时变坡角下的纵向速度的跟随控制。其中,设坡道的角度θ为0°~90°,输入变量为坡道角度,输出变量为左右两轮的速度差,定义的全部模糊子集存放在规则库中[5],与传统控制器依赖于系统行为参数的控制设计及方法不同,改善模糊控制性能的最有效方法是优化模糊控制规则。每3°为一个层级,共30个层级,设0~10级为不太陡,15~20级为稍陡,20~30级为非常陡。将此推理写入数据库和规则库,从而精确控制电动小车在坡道上的行驶。
2 单速比电动小车坡道起步的理论分析
电动小车处于坡道工况下时,车辆所受重力G可分解为平行于路面方向的分力G1和垂直于路面方向的分力G2[6]。平行于路面方向的分力G1将以坡道阻力F1的形式作用于车辆的坡道运动,而垂直于路面方向的分力G2将以正压力F的形式作用于路面。在坡度值为α的坡道上起步时,受驱动力Ft、空气阻力Fw、坡道阻力Fi、加速阻力Fj以及滚动阻力Ff的共同作用,有:

式中:Tm为电机驱动转矩;i0为单级减速器传动比;η为传动系统效率;r为车轮半径;Cd为风阻系数;A为迎风面积;m为整车质量;g为重力加速度;υ为车速;δ为汽车旋转质量换算系数;a为车辆加速度;f为滚动阻力系数。
车辆可以发出的最大驱动力Ft应大于沿坡道向下的各种阻力之和,即Ff>Ft+Fw+Fi+Fj+f,车辆才不会沿坡道滑下。该条件也对应于驱动轮发生打滑导致的驱动力不足而引起的通过失效[7]。
电动小车满足刚体运动规律,运动方程为:

而电动小车的质心运动方程为:

式中:v为电动小车质心的线速度;ω为电动小车质心的角速度;VL和VR分别为左右轮的线速度;ωL、ωR分别为左右轮角速度;θ为质心运动转向角;R为左右轮的半径;L为两轮的间距;x、y代表电动小车质心的二维平面坐标。
方程(13)中各变量相互关联,设计控制器时比较复杂,因此需要先对方程(13)进行解耦处理。因为θ只与质心的角速度有关,x、y只与质心的线速度有关,故可将控制变量转为质心的线速度和角速度,方程如下:

由式(14)可知,根据移动电动小车(质心)设定的目标线速度和角速度,可分别求得左右轮的实时角速度。当x´=y´时,质心的角速度ω为0,即电动小车沿直线运动;当x´=-y´时,质心的线速度为0,则智能小车可实现原地转身,此时电动小车将以零半径转弯。电机驱动机构响应单片机完成速度调节,从而实现移动机器人运动方向和速度的实时控制。
3 测试方案与测试结果
3.1 软硬件联调
在前期测试中,进行无程序时小车坡道行驶的测试、转速控制、舵机直线及转向运动测试,测试达到满足要求的最小时间。在取得较好的效果后,利用5 V电池供电保证小车可正常爬坡,给稳压电源测试电机转速比,实验电机是否符合题目对于时间的要求,以保证小车在稳定性、速度以及时间上均达到要求。
通过模糊PID算法,模仿出PWM波并测量是否能通过电机驱动来使电机控制小车运动。通过多次测试,找出小车转向调速的PWM值。此外,通过串口向主控板发送数据,检测数据是否正确。通过软件编程对显示的数据进行修改,再进行小车在不同角度时各方面性能表现距离的测试。
3.2 测试结果及分析
在木板上作一全程为1 m的圆弧标记线,电动小车从出发点开始计时骑线行驶,在停车点停止计时,逐渐增大坡度角,得到行驶该标记线所用时长的测试结果,如图3所示。图3对比了坡道起步系统改进前后的爬坡性能,证明爬坡性能有所改善,系统适应性良好。

图3 测试结果图
4 结语
针对智能小车坡道行驶性能的优化问题,提出了以STM32G4 MCU为核心,利用模糊PID算法控制智能小车的转向并完成爬坡任务的设计。根据仿真与试验分析显示,该设计改善了电动小车坡道起步的性能,减少了起步延迟,电动机输出转矩足以克服坡道起步所需转矩,解除了驻车制动力,从而使电动小车在坡道上行驶更省力,并利用模糊PID控制算法优化算法规则库实现了更加精准的控制。
