小型无人机航测技术在土地测绘中的应用
2021-08-23潘莉
潘莉
摘 要:随着测绘技术的发展,无人机航拍已成为小区域地形测绘的主要手段。该文在阐述测绘仪器发展的基础上,重点探讨了无人机技术的发展与应用,并以大疆精灵4 RTK无人机航测系统和ContextCapture软件为例,梳理了小型多旋翼无人机进行小区域航测生产正射影像图工作的具体流程,为无人机航测技术在土地测绘中的应用提供参考。
关键词:无人机;摄影测量;土地测绘;应用
中图分类号 P217文献标识码 A文章编号 1007-7731(2021)13-0140-03
土地是地球表面某一地段包括地质、地貌、气候、水文、土壤、植被等多种自然要素在内的自然综合体,是人类社会得以存在和发展的基石。土地测绘就是对土地及其之上的附属物进行准确空间定位的工作。无论是土地资源的调查与评价、国土空间规划、各类用地监测,还是土地生态修复,准确获取地块的空间位置信息都是各项工作进一步开展的前提。而各种土地利用规划方案的落地实施也都需要使用测绘技术将图纸上的规划成果测设到实地。因此,土地测绘是进行土地管理工作的重要技术手段。
1 测绘仪器的发展历程
测绘技术的发展史很大程度上是测绘仪器的发展史。测绘仪器直接关系到土地测绘成果的准确性以及土地测绘工作的效率。由于技术落后,新中国建立后很长一段时间内,土地测绘实务中主要依赖罗盘仪、平板仪等测绘工具。这类设备在确定地面点空间坐标,特别是测定平面坐标时,地形相对复杂的区域会产生较大误差,如当时在大比例尺地形图碎步测量中应用较为广泛的大平板仪。水平距离及高差则均用视距法测定[1]。而视距法最主要的误差来源于视距尺的读数误差,该误差又会被望远镜的视距乘常数所放大,而高差又受到距离误差的影响,因此碎步测量中点的三维坐标准确性不高。另外,在施测过程中,需要3~4人合作,工作强度较大,效率低。20世纪80年代之后,光学经纬仪逐渐成为测绘工作中的主要设备。经纬仪在角度测定的准确性上有了较大提升,但是在距离测量上还是保持着控制测量以钢尺测距,碎步测量以视距法测距为主的模式。90年代后,随着光电测距技术、光电测角技术以及微处理器技术的发展,全站仪逐渐替代光学经纬仪和电子经纬仪,成为测绘行业中的主流设备,并成为真正意义上的数字化测绘设备。但是由于其价格较高,全站仪进入市场初期还与普通光学测绘设备协同作业[2]。随着市场的不断扩大,全站仪价格大幅下降,目前已成为测绘设备的常规设备。近年来,以全站仪为基础发展起来的三维激光扫描仪,结合与之配套的点云数据处理软件、无控制点拼接技术、三维建模软件以及车载移动平台等,也已经在矿山测绘、地下工程测绘、古建筑测绘、数字城市建模等领域开始应用[3-6]。
虽然全站仪可以进行数字化测图,但是与传统的光学测绘仪器一样,其测定的都是空间点的相对位置。另外,全站仪测绘仍然受到视线阻碍的影响。全站仪在进行土地测绘时,虽然较平板仪、经纬仪更加准确,工作效率也有所提升,但是在进行大面积土地测绘、复杂地形地物测绘时仍需多人协同,工作强度和工作效率仍有待提高。卫星定位技术特别是差分技术的出现有效解决了传统光学设备需要“通视”的屏障,还可以测定绝对坐标,开启了“单兵”测绘的数字化测绘模式,不仅极大降低了测绘工作强度,还有效提升了测绘工作效率。采用全球导航卫星系统(GNSS)静态测量布设首级控制点,再利用GNSS实时动态差分(RTK)技术开展图根控制测量,最后利用全站仪进行碎步测量,可以获得精度较高的测绘成果[7]。近年来,随着网络RTK技术的发展,连续运行参考站系统(CORS)正在成為RTK测量的主流测量模式。目前在利用RTK进行实际土地测绘中,最为常用的是由国家测绘部门组织建设的“全国卫星导航定位基准服务系统”(俗称省CORS)和千寻位置网络有限公司建设运营的国家北斗地基增强系统“全国一张网”(俗称千寻CORS)。其中千寻CORS以北斗导航系统为主体,兼容GPS、GLONASS、伽利略等卫星导航系统信号,可提供厘米级高精度定位服务,并且实现了统一规划、组网及跨区域无缝服务。利用以上CORS系统进行土地测绘,可直接测量得到CGS2000坐标成果,并且完全满足1∶500大比例尺地形图测绘的需要。现阶段,用全站仪和GNSS-RTK系统进行联合测绘已经成为土地测绘中最主要的工作方式[8,9]。
2 无人机航测技术的发展与应用
虽然以全站仪和GNSS为主流的数字化测图技术得到了广泛应用,但是对于面积较大、地物分布密集的区域,全站仪结合GNSS-RTK联合测绘的工作模式仍然存在一些问题:在地形测量时,测绘人员仍需测遍整个测区,有时难免会遗漏一些重要碎步点;受通视条件制约,全站仪测绘时需要频繁换测站;RTK测绘精度易受建筑、高大树木、大面积水域及高压线路的影响;人力、物力投入大,成本高,无法满足各项土地测绘的整体性和时效性要求。而无人机航测技术以其机动性、低成本、高时效性等优点,一经出现即受到测绘工作者的青睐。
我国无人机的发展始于20世纪60年代,80年代中期转向民用领域研发。2008年汶川地震发生后,无人机在抢险救灾工作中的出色表现促进了民用专业级无人机的发展。2010年法国Parrot公司生产的Parrot AR.DRONE投入市场,标志着消费级无人机市场的开启。2013年深圳大疆创新科技公司发布“大疆精灵”多旋翼无人机产品,在国内掀起了无人机应用的浪潮。在土地测绘工作中,最初只是借助无人机作为飞行平台,搭载数码相机进行手动拍摄重叠影像,缺乏定位系统,航拍系统缺乏整合性,空间位置精度不够。随后,大疆推出了精灵4 RTK无人机,新增了RTK导航定位系统、相机微秒级同步、APP航线规划等功能,将厘米级导航定位系统和高性能成像系统结合,提升了航测效率与精度,降低了作业难度和成本,彻底解决了之前固定翼无人机航拍系统价格高、操作复杂、灵活性不足等问题,目前已经在大比例尺地形图测绘[10]、自然资源督察[11]、不动产测绘、房地一体化测绘[12]、地质灾害监测[13]等领域得到广泛应用。
3 小型旋翼无人机航测工作流程
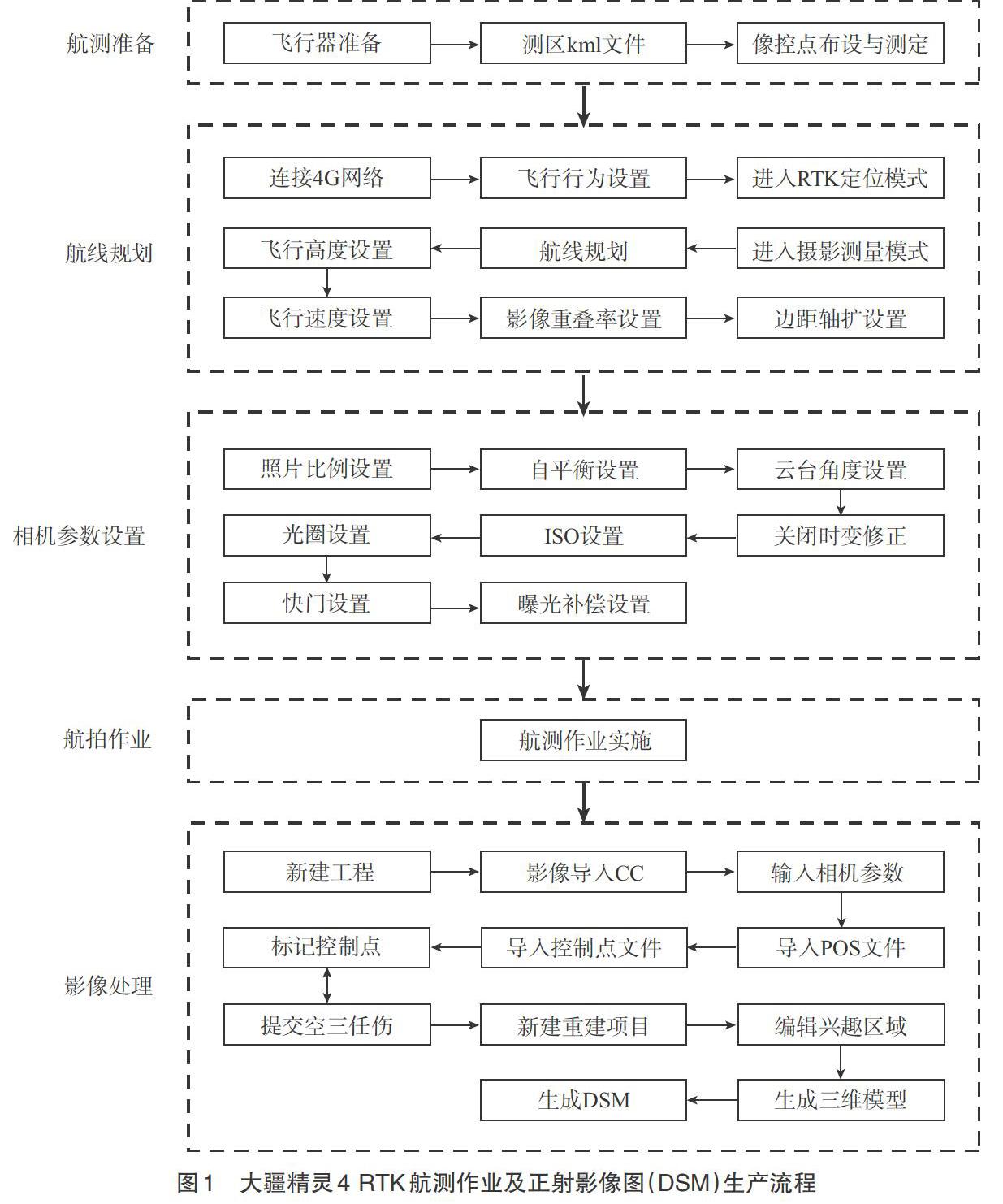
在小型旋翼航测无人机中,大疆无人机因其操作方便、成本低廉,在小范围土地测绘工作中被广泛应用。以大疆精灵4 RTK为例,在常用的RTK模式下获取测区正射影像的工作流程如图1所示。影像数据处理采用Bentley公司的ContextCapture软件(简称CC)。整个工作流程可分为航测准备、航线规划、相机参数设置、航拍作业和影像处理5个阶段。
3.1 航测准备 航测准备是到达测区之前应提前做好的前期准备工作。其中飞行器准备工作要求配备足够数量的飞行电池。通常每块大疆精灵4 RTK的电池正常飞行18~24min,而充电时间约为50min。具体每块电池的工作时间不仅与测区面积和形状、飞行高度、重叠率等有关,还与电池使用寿命及当时气温有关。测绘人员可根据需要携带多块电池和充电器,边用边充,以便航拍工作“无缝”连接,以提高作业效率。除此之外,还应考虑遥控器电池的使用时间,最好预备1块备用电池以便轮流充电使用。另外,测区范围应提前准备,建议采用相关地图软件制作的测区地标kml文件导入遥控器中使用,该方法比在遥控器界面中手绘测区范围更精确。虽然大疆精灵4 RTK可以在免像控点的情况下进行测图,但控制点能有效提高飞行器航测成图的精度。因此,合理布设像控點,准确测定其坐标是航测准备阶段的1个重要环节。
3.2 航线规划 航线规划首先要保证飞行器遥控器的网络连通。通过遥控器上安装有sim卡的4G网卡来实现联网,并用网络RTK账号正确登陆服务器,并确保RTK获得固定解。如果只对测区进行正射影像数据采集,则可只采用摄影测量2D的航线规划方式,以节省航拍时间。航线规划中最重要的是要保证安全的飞行高度,注意测区内的最高地物,飞行高度和返航高度要高于测区内最高地物的髙度。
3.3 相机参数设置 相机参数设置主要是为了获取清晰的航拍相片,通常按默认设定。拍摄模式建议采用定时拍摄;拍摄完成后选择自动返航;云台角度在拍摄正射影像时选择-90°;为了提升建图精度,建议关闭畸变修正功能。
3.4 航拍作业 大疆精灵4 RTK无人机的航拍作业基本是自动完成。当飞行器电量降低到警戒值时,会发出提示。飞行器根据剩余电量和到已记录的起飞点距离进行智能判断,并选择合适时机返航,无需人工干涉。当飞行器降落后,更换电池后可按照未完成的航线继续拍摄。
3.5 影像处理 当飞行任务结束后,将飞行器上储存卡中的航拍照片导入电脑中以备处理。流程中需要注意:相机参数信息保存在照片中,可以用记事本打开照片找到相关参数;POS信息是每张照片的空间位置信息,其格式要规范,要与照片名称一致;在影像上标记控制点后进行初次空三解算,可以得到控制点的大致位置,以便通过更多包含控制点的照片上精确标记控制点,当所有控制点标记完成后进行再次空三解算,以使得所有像控点都被准确标记;重建项目进行影像拼接,在空间框架内选择正确的坐标系,瓦片大小要适宜,需要调整瓦片大小,使得重建需要的内存小于电脑内存,充分考虑留给系统运行的内存空间;如果之前设定的是构建测区的三维模型,则在三维模型构建成功后选择生成测区的正射影像图。如果只需要获取测区正射影像,可以在工程中直接选择生成正射影像图。
参考文献
[1]徐长河.运用平板仪施测地形图[J].煤炭技术,2009,28(3):146-148.
[2]王有良,赵立中.全站仪与平板仪相结合测绘地图[J].山东农业大学学报(自然科学版),2001,32(2):227-228.
[3]王东晓,韩林,路林海.TS50全站仪配合多测回测角软件在地铁基坑监测中的应用[J].测绘与空间地理信息,2021,44(1):32-33,37.
[4]谢雄耀,卢晓智,田海洋,等.基于地面三维激光扫描技术的隧道全断面变形测量方法[J].测绘通报,2016(2):143-144.
[5]段月辉.徕卡P50三维激光扫描仪在建筑地形图测绘中的应用[J].测绘通报,2020(6):158-162.
[6]陈巍巍,刘锟铭.三维激光扫描技术在旧城改造古建筑保护中的应用[J].江西测绘,2020(2):28-31.
[7]贾存鹏.全站仪和GNSS-RTK在数字测图技术标准中的应用初探[J].中国标准化,2018,536(24):112-113.
[8]吴东亮,尚颖娟,谷达华,等.RTK系统、全站仪及CASS软件在地形测绘中的应用探讨[J].测绘科学,2009,34(2):194-196.
[9]程飞,张丽娜,张晓亮.全站仪和GPS一体化测量方法探讨与精度分析[J].测绘工程,2014,23(4):69-71.
[10]吕立蕾.无人机航摄技术在大比例尺测图中的应用研究[J].测绘与空间地理信息,2016,39(2):116-118,122.
[11]周志峰,安志宏,郑少开,等.无人机倾斜摄影技术在自然资源督察中的探索与实践[J].工程勘察,2021,49(3):43-46.
[12]陈成斌.基于无人机倾斜摄影的房地一体化农村宅基地测量方法[J].测绘与空间地理信息,2020,43(3):197-200.
[13]李小玲,胡才源,孙全福,等.无人机遥感在高山峡谷区崩塌地质调查中的应用[J].地理空间信息,2021,19(1):78-81,124.
(责编:徐世红)