航天器海上伞降回收技术发展与展望
2021-08-22何青松王立武王寒冰王广兴房冠辉
何青松 王立武 王寒冰 王广兴 房冠辉
(1 北京空间机电研究所,北京 100094)
(2 中国航天科技集团有限公司航天进入、减速与着陆技术实验室,北京 100094)
随着我国载人航天工程的不断发展,对于部分任务模式,需要考虑海上回收情况,可以提高飞船在轨阶段的应急返回灵活性。同时,近年来随着我国海南文昌航天发射中心投入使用,对航天器海上回收技术的需求也应运而生。此外,运载火箭子级、助推器以及整流罩的海上回收,一方面可以保证分离体的下落轨迹,确保落点安全,另一方面可以实现运载火箭可重复使用,降低航天发射成本。因此,发展海上回收技术对我国航天事业的发展具有重要意义。
海上回收又可分为海上平台回收和海上伞降回收,海上平台回收是指飞行器完成任务后通过自身携带的控制系统和动力装置,按照设定的轨迹自主飞行到海上平台,如美国太空探索技术公司(SpaceX)研制的法尔肯9重复使用火箭子级回收[1]。海上伞降回收是通过降落伞使航天器减速到一定速度,然后航天器直接溅落到海面上,然后通过海上搜救船和直升机找寻并回收,如美国航天飞机助推器以及阿波罗飞船等的回收方式[2-3]。我国已经完成神舟飞船和返回式卫星的陆地回收,基于陆地回收技术中已有的降落伞减速技术发展海上伞降回收技术是实现航天器海上回收的较好的选择。而且,海上伞降回收的可靠性高、运载能力损失低,长期以来世界各航天大国一直在开展相关研究。
相比于陆地回收,海上伞降回收有如下优势[4]:着水冲击力相对于着陆冲击力更小,航天器不用安装着陆缓冲系统,降低了航天器的质量;海上伞降回收能够避免陆地上存在的沟壑以及树木等天然危险物,有利于航天器的安全回收,还能避免降落到人口密集区域,造成对人员和建筑物的伤害,导致不必要的经济损失;海面的物理特性变化较小,海区选择相对容易,增强了对航天器对多种倾角轨道的适应性;海域相比于陆地更加宽阔,飞船在轨应急返回可供选择的着陆区域更大,增加了在轨应急返回的灵活度。
开展海上伞降回收面临的问题非常多,包括航天器的轨道设计、测控网络、控制系统、以及构建海上着陆场和海上搜救系统等,这些问题对于航天器海上伞降回收的顺利开展都十分重要。相比于我国已经掌握的陆上回收技术而言,海上伞降回收最大的不同还是在于降落伞开伞后面临的气动减速以及海上搜救等问题,因此本文将重点对这些问题进行介绍。
本文就国外航天器海上伞降回收情况进行了介绍,分析了海上伞降回收的关键环节,对我国开展海上伞降回收的研究基础进行了介绍,并对开展海上伞降回收进行了研究展望,相关内容可为我国进行海上伞降回收研究提供参考。
1 国外海上伞降回收进展
目前,采用海上伞降回收最多的国家是美国,已经成功完成了多种型号飞船返回舱、航天飞机助推器以及整流罩的海上伞降回收,还对运载火箭子级海上伞降回收进行了系统研究。除美国外,欧空局和俄罗斯合作进行了阿里安5号(Ariane-5)助推器的海上伞降回收,印度成功完成了太空舱返回试验船(SRE)的海上伞降回收。
1.1 返回舱海上伞降回收
美国采用海上伞降回收成功进行了水星号(Mercury)、双子座(Gemini)以及阿波罗(Apollo)3个系列飞船的返回舱回收[5]。美国第1个载人航天计划是水星计划,共实施6次载人发射,飞船返回舱采用单伞减速回收的方式,飞船最终以8.5 m/s的速度着水[6]。双子座飞船外形与水星号飞船相似,共进行了10次载人飞行,飞船返回舱的降落伞着陆系统基本上沿用了水星号的方案。其中,双子座降落伞回收系统共进行了67次试验,水星号降落伞回收系统进行了多达152次试验[7]。双子座降落伞回收系统在索尔顿湖上进行的试验如图1所示[8]。
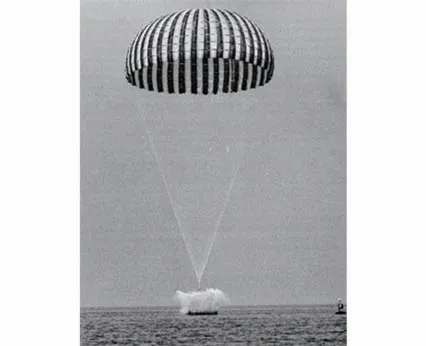
图1 双子座降落伞回收系统实验Fig.1 Experiment of Gemini parachute system
阿波罗降落伞回收系统的设计是基于水星号和双子座的经验,由于技术复杂性的增加,阿波罗计划仍进行了多达147次试验[7]。阿波罗飞船回收系统的工作过程如图2所示,阿波罗飞船采用了三群伞系统进行减速[9]。
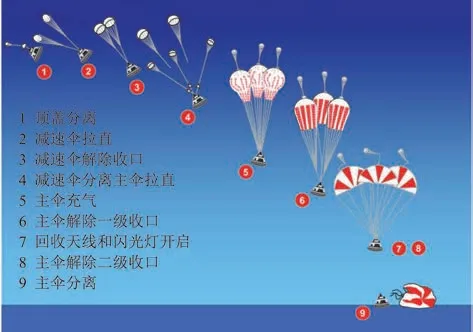
图2 阿波罗飞船回收系统工作过程Fig.2 Working process of Apollo recovery system
美国近年来研制的猎户座飞船(Orion)返回舱在设计上一定程度上继承了阿波罗飞船的设计,猎户座返回舱质量为9237 kg,是阿波罗飞船的1.6倍[10]。相对于阿波罗飞船,猎户座飞船采用的降落伞更大,提出的技术指标更高。美国SpaceX 公司研制的龙系列飞船(Dragon)包括龙一和龙二,其中货运飞船龙一采用了海上伞降回收。飞船的减速伞和主伞都布置在返回舱的下部,减小了返回舱上部空间布局难度,降低了返回舱的重心高度[11]。
印度在2007 年发射了太空舱返回试验船(SRE-1),它是印度第一个返回式航天器。试验船在太空飞行12天后成功溅落在孟加拉海面上,由印度海岸警卫队和印度海军出动舰只、固定翼飞机和直升机成功回收了返回试验船[12]。太空舱返回试验船模型在海面作漂浮试验如图3所示[12]。

图3 太空舱返回试验船模型海面漂浮试验Fig.3 Space capsule module floating test
1.2 火箭助推器海上伞降回收
航天飞机的助推器的再入质量为81 600 kg,是目前被降落伞回收最重的载荷[13-14]。航天飞机助推器采用的三具主伞回收,以23~27 m/s的速度溅落在海面上,航天飞机助推器溅落过程如图4所示。根据任务需求,航天飞机助推器降落伞状态进行了两次较大更改,单具主伞面积最大时达1320 m2,质量达980 kg[14]。

图4 航天飞机助推器溅落过程Fig.4 Process of space shuttle booster splashdown
战神火箭(Ares)是星座计划中的运载火箭,战神Ⅴ火箭助推器和战神Ⅰ火箭第一级回收系统的设计基本相同,两者回收方案也基本相同。战神Ⅰ火箭的第一级设计为可回收重复使用,其回收系统方案继承了航天飞机助推器的回收系统方案。截止2009年10月,战神Ⅰ火箭降落伞回收系统开展了多次的火箭橇试验和空投试验,降落伞系统得到了有效的验证[14]。但是美国星座计划取消后,战神火箭的研制也终止了。
20世纪80年代中期,欧空局和俄罗斯合作开始研究阿里安5号的固体火箭助推器的回收技术。欧洲阿里安5号助推器的降落伞回收系统安装在助推器的前部和头锥内,通过降落伞系统减速,助推器最终溅落海面的速度低于27 m/s[15]。1996年6月,阿里安5号运载火箭的首次发射试验中由于火箭故障,助推器的伞降回收系统未能得到验证。1998年10月,伞降系统成功回收一个助推器,另一个助推器再入过程中被折断,未能回收[16]。
1.3 整流罩海上伞降回收
2019年6月,在猎鹰重型火箭(Falcon Heavy)的第3次发射中,SpaceX 的新型网捕船成功捕获到半个整流罩,完成航天史上第一次对整流罩的回收[17-18]。火箭整流罩在100 km 左右高空分离后通过冷氮气喷射调整姿态,以半弧形朝下的姿势坠入底层大气。下降到大约15 km 的高空处,减速伞打开稳定整流罩下落。不同于常用的海上伞降回收方式,在下降的最后阶段,SpaceX 采用翼伞对整流罩进行可控回收,翼伞面积约为280 m2[17]。为了避免整流罩被海水腐蚀导致无法工作,SpaceX 在海上部署了大型捕捉船,捕捉船伸出4个可伸缩大臂支撑大网,在整流罩落入大海之前将整流罩接住,如图5所示[19]。

图5 整流罩捕获Fig.5 Fairing capture
相比于常用的海上伞降回收方案,Space X 的整流罩回收方案不需要对整流罩进行海上打捞,同时整流罩没有被海水侵蚀,能够有效缩短翻修时间,降低翻修费用。由于需要将整流罩精准的落入网捕船中,这种方案技术更加复杂,主要涉及到翼伞精确回收系统的建立。在翼伞理论研究方面,难点在于翼伞模型建立、航迹规划、归航控制算法等研究。在实际应用方面,需要针对海上环境开展多次空投试验,海上空投试验还需要考虑高海况情况,这无疑增加了海上空投试验的难度。
2 海上伞降回收关键环节分析
2.1 海上伞降回收技术体系
目前,通过海上伞降回收主要完成了助推器、整流罩以及飞船返回舱的回收,为这3种航天器海上伞降回收过程的如图6 所示。由于回收方案的不同,是否采用引导伞以及各阶段采用的降落伞个数也存在差异。当航天器溅落在海面上后,需要进行姿态调整以便后续回收工作的开展。搜救人员通过航天器发出的标位信息确定航天器的溅落地点,然后迅速靠近开展救援回收工作。返回舱的救援回收过程中采用了救援直升机和搜救船,助推器的回收中通常采用搜救船进行拖运,而整流罩则通过网捕船进行捕获。
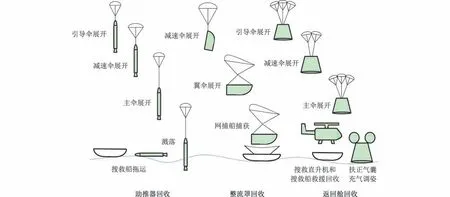
图6 海上伞降回收过程简图Fig.6 Sketch of process on parachute offshore recovery
虽然助推器、整流罩和飞船返回舱成功回收的方案存在一些差异,但总体上可将航天器海上伞降回收技术归纳为降落伞对航天器进行气动减速的降落伞气动减速技术;航天器溅落海面涉及到的航天器着水冲击技术;航天器溅落海面后对航天器姿态进行调整以便救援回收工作开展的航天器姿态调整技术;航天器发出位置信号以便搜救人员尽早发现航天器的海上标位技术;搜救人员对航天员进行救援以及对航天器各部件进行回收的海上救援回收技术。
2.2 降落伞气动减速
降落伞气动减速的主要作用是降低航天器的下降速度,稳定航天器的运动姿态,保证航天器按照要求的姿态和速度溅落在海面上。研究表明,返回舱的入水姿态和入水速度对最大加速的影响十分显著[20-21]。因此,降落伞以及航天器吊挂方式等的设计对航天器能否安全着水十分重要。我国在神舟系列飞船和返回式卫星的陆地回收中已经积累了丰富的降落伞气动减速技术的经验[22],可为我国海上伞降回收提供有力的技术支撑。目前航天器质量都比较大,普遍采用了群伞系统进行气动减速,另外采用群伞系统还可以降低灾难性事故的概率。阿波罗15号返回舱返回地球时,其中一具主伞失效,另外两具主伞正常工作仍保证了返回舱安全着水,如图7所示[9]。但是群伞系统面临的技术难点多,存在开伞不同步、开伞过程过载较大等问题。

图7 阿波罗15号一具主伞失效Fig.7 One of Apollo 15 main parachutes failure
2.3 航天器着水冲击
陆地回收除利用降落伞减速外,还需要增加气囊或反推发动机等着陆缓冲装置,而海上回收通常不采用着陆缓冲装置,而是直接溅落在海面上,这就涉及到航天器着水冲击的研究。航天器着水冲击问题的研究主要是为了考察着水过程中冲击载荷的大小,从而对航天器着水速度、姿态以及结构强度设计等提出指标要求,保证航天器能够安全溅落在海面上。
着水冲击问题的研究主要分为试验研究和数值模拟研究。按照科学充分的试验方案开展海上溅落试验研究,可以获得真实准确的溅落冲击数据,猎户座返回舱模型着水冲击试验情况如图8 所示[23]。然而,试验研究需要制造样机或模型,而且实验中样机或模型容易被摔坏,导致试验成本高、周期长。数值模拟弥补了试验研究的不足,仿真模型可以根据设计快速更改,可以对恶劣工况做出准确预测,有效减少试验次数[24]。航天器着水冲击是流固耦合研究领域里比较复杂的问题,采用的主要算法包括基于网格的任意拉格朗日欧拉(ALE)法和无网格的光滑粒子动力学(SPH)方法。其中SPH 方法由于不采用网格,没有网格畸变问题,在处理着水冲击这种非线性大变形问题上有较大优势[25]。文献[26]采用SPH 方法对返回舱入水后姿态随时间变化进行了研究,证明了SPH 方法能够准确预测飞船入水过程中水和飞船相互作用的各个参数。

图8 猎户座返回舱模型着水冲击实验Fig.8 Splashdown impacting experiment of Orion capsule
2.4 航天器姿态调整
航天器姿态调整是为了使航天器溅落在海面上后能够保持合适的姿态,从而能够保证通信通风系统等正常工作、航天员能够处在舒适的姿态以及后续搜救工作的顺利开展等。
飞船返回舱入水后可能呈现两种状态,头部朝上或头部朝下。如果头部向下,通风系统将不工作,通信功能因前舱天线在水下也部分消失,航天员在返回舱内也将处在一个非常不舒服的姿势。因此需要在返回舱顶部安装扶正气囊,通过气囊的浮力将返回舱扶正,使返回舱在水中能够保持头部朝上的姿态[27]。如果扶正气囊失效,没有能够将返回舱扶正,则需要潜水员将绳子与返回舱头部的回收钩连接,然后通过直升飞机将返回舱拉动扶正。阿波罗飞船返回舱的扶正气囊和回收钩如图9所示。[9]

图9 阿波罗飞船返回舱的扶正气囊和回收钩Fig.9 Uprighting balloons and recovery hook of Apollo spaceship
火箭助推器入水后若保持竖直状态漂浮于水面,则不便于回收船进行拖运,航天飞机助推器竖直漂浮于海面如图10所示[28]。为了使助推器变为水平漂浮状态,潜水员需潜入水中将充气设备放入助推器壳体内,然后向壳体内充气,壳体内的海水被排出后,助推器变为水平漂浮。

图10 航天飞机助推器竖直漂浮于海面Fig.10 Space shuttle booster floats vertically on the sea
2.5 海上标位
海上标位的主要作用是向回收区的搜索人员提供航天器着水后的位置和方位信息,让搜救人员快速确定航天器位置,进而能够及时靠近航天器开展搜救工作。标位装置一般以无线电标位为主,辅以其他标位手段,在海上主要的辅助标位装置是海水染色剂或发烟罐等。无线电标位主要用于远距离搜索定位,海水染色剂或发烟罐等主要用于近距离目视搜索定位。
美国在阿波罗系列载人飞船返回舱的定位跟踪中,主要采用的测控通信网络包括地面站,回收船和地面通信网络,测量数据传输到任务控制中心并进行数据处理,以此来实现对返回舱的定位[29]。美国和俄罗斯载人飞船返回舱定位中所利用的另一个方案是全球卫星搜救系统,该系统利用卫星对地球上求救信号进行搜索救援。全球卫星搜救系统的极轨卫星接收用户遇险示位标发出的信标信号,经处理后将结果发送到卫星当前可见的本地用户接收终端。处理结果在下行转发的同时被存储在卫星上,并在卫星运行过程中不断对地面广播,从而使全球所有跟踪此颗卫星的本地用户接收端都可以得到求救信息[29-30]。
辅助标位主要为搜救人员提供视觉搜救指示标志,从而使搜救人员能够快速发现搜救目标,节约搜救时间。海水染色剂以及发烟罐等辅助标位装置都只能在一定时限和一定范围内才能提供较为明显的标位信息,对于海况复杂的环境,标位信息的时效性更短甚至无法使用。因此,辅助标位装置一定要注意开启时间,避免在搜救人员发现之前就失效。此外,海上回收区应设置主备着陆海区,选择海况较好的海区着陆,不仅有利于辅助标位装置发挥作用,也降低了后续海上救援回收的开展难度。
2.6 海上救援回收
海上救援回收主要是搜救人员靠近溅落在海上的航天器,及时救助航天员并提供医监医保医疗救护,以及对航天器以及降落伞组件等进行回收。海上搜救力量主要依靠海、空、天紧密结合的方式构成综合搜救体系。在海上配置救捞船,承担近距离搜救和打捞任务;在不同高度布置数架直升机,形成局部详查和全区普查相结合的空中搜救体系;使用卫星系统对着陆海区以及着陆海区以外的区域实施大范围全时段监控,及时获取求救信息[4]。
海上救援回收工作主要由救援作业直升机投放潜水员和专用设备完成,同时还需要提供一定的备份救援作业直升机以及相应的潜水员和专用设备。海上救援作业直升机对阿波罗飞船进行救援回收如图11所示[9]。除了救援作业直升机以外,必要时还需配备搜索指挥直升机、医疗救护直升机、医监医保直升机以及支援直升机等。

图11 救援作业直升机对阿波罗飞船进行救援回收Fig.11 Helicopter rescues and recovers Apollo spacecraft
除了直升机,打捞船是海上救援回收不可或缺的一部分,船上应配备搜索定位设备、医疗设备及专用舱室、通信指挥设备等,这些设备和舱室的布局要合理,比如医疗舱室应尽量靠近前甲板,这样有利于减少航天员的搬动以及救治工作的快速开展[31]。海上救援回收任务很可能遭遇不可预测的高海况环境,在没有外部力量的支援下,救援回收工作能否顺利开展完全取决于救援船自身的技术设备,所以设备的安装必须细致,必须固定到位,医疗物资必须充足[31]。另外,打捞船还需要适应远航的需求,以应对远距离的救援回收任务。
3 我国海上伞降回收基础与发展展望
3.1 我国海上伞降回收基础
我国目前虽然还没有进行过航天器的海上伞降回收,但是我国已经具备了部分海上伞降回收的开展条件。我国已经成功完成了载人飞船和返回式卫星的陆地回收,对降落伞气动减速技术已经有了系统的研究,我国新一代载人飞船的成功回收也标志我国掌握了群伞减速技术。此外,北京空间机电研究所、南京航空航天大学等单位对降落伞相关气动和动力学的理论以及实验进行了深入研究[32-37],可为我国海上伞降回收提供良好的技术基础。
中国船舶科学研究中心与北京空间飞行器总体设计部在1996年合作进行了“返回舱漂浮和水上冲击特性计算及缩比试验”的研究项目[38],该项目研究可为开展水冲击实验研究提供参考。我国南京航空航天大学、北京航空航天大学、西北工业大学等高校在水冲击问题上已经有较为深入的理论研究[39-41],可为水冲击问题的理论研究提供较好的支撑。
飞船返回舱的姿态调整主要通过扶正气囊实现,北京空间机电研究所在气囊的研制上已经有较为丰富的技术储备,在新一代载人飞船试验船的回收中采用气囊来进行着陆缓冲,相关研究可为我国航天器姿态调整技术的研究提供很好的支撑[42]。
就海上标位而言,我国在神舟飞船的陆地回收的技术经验可以为海上标位提供重要参考,再加上我国北斗卫星导航系统组网成功,极大的提升我国海上标位技术能力。
我国曾对海上救援回收进行过一定研究,针对海上医疗救助任务进行过救援船的改装,并派医疗队执行神舟飞船海上卫勤保障任务[31]。但是,海上救援回收系统庞大,构建海上救援回收系统耗资较大,需要进行系统的论证研究。
3.2 我国海上伞降回收发展展望
随着我国新一代载人飞船试验船回收成功,我国在航天器陆地回收领域又取得了巨大突破,基于群伞-缓冲气囊的航天器回收方案使我国的航天器陆上回收能力得到极大提升。但是地球70%的面积被海洋覆盖,发展海上回收,增强我国航天器回收的能力,以适应未来我国日益频繁的空间任务十分重要,基于陆地回收中掌握的降落伞气动减速技术是我国实现海上回收的最佳选择。但是发展海上伞降回收,我们仍然需要解决一些关键问题。
(1)航天器海上空投试验以及高海况海上综合试验。海上空投试验能够全面检测回收系统的可靠性,目前我国还没有开展过航天器的海上空投试验,航天器在海上溅落的数据尚不明确。我国对神舟飞船进行过海上综合试验,可以确定飞船具有漂浮能力,能够为航天员提供生保环境。但是海面环境变幻莫测,在高海况下飞船返回舱是否还能够为航天员提供生保环境,以及能够提供多久的生保环境,这些问题都需要试验的验证。
(2)海上救援回收体系搭建。从我国目前的情况来看,海上救援回收是我国发展海上伞降回收最薄弱的环节,主要是因为海上救援回收体系构成复杂,我国在海上救援回收的研究也较少。我国虽然有陆上回收的经验,但是海上回收需要配置船队,开展海上搜救任务以及提供医监、医保支持等。目前我们执行载人航天任务的海上卫勤保障的船只都是临时征召的,在设计上还存在很多不合理的地方,因此需要针对空间任务特性重新设计组建海上船队,相应的资金投入也非常大。
(3)溅落海区的选择。溅落海区对于海上伞降回收的顺利完成至关重要,海面平静无风能够保证降落伞不被吹离预定海域,也能使搜救人员更快发现被搜救的目标,还能方便救援回收工作的开展。因此,溅落海区要选在气候稳定,或者气候变化规律的海域,不能选在自然灾害较多的海域。溅落海区可以尽量选在近海区域,这样可以利用陆上固有的测控站点,还可以缩短航天员运送到陆地的时间。另外,还需要设置多个备份溅落海区,防止主溅落海区因天气恶劣等原因不满足航天器返回的条件。
(4)大质量航天器群伞减速技术。不难看出,降落伞气动减速技术是开展航天器海上伞降回收面临的最难也是最关键的技术问题。随着我国航天技术的不断发展,航天器的质量越来越大,采用群伞减速技术是未来的发展趋势。但是群伞存在开伞不同步、伞间干扰等问题,技术复杂程度相较于单伞高很多。我国在新一代载人飞船试验船的回收中采用了群伞减速技术,验证了我国群伞技术的可靠性,但是面临我国未来日益频繁的空间任务,还需要开展更多的试验研究和理论研究来巩固和加强我国群伞技术的可靠性。
4 结束语
随着我国航天技术的不断发展,提出了对航天器海上回收技术的迫切需求。根据我国目前掌握的技术,开展海上伞降回收是最佳的选择。本文介绍了海上伞降回收的优势以及国外海上伞降回收的研究情况,根据海上伞降回收的方案,分析了海上伞降回收面临的关键环节。根据各个关键环节,介绍了我国发展海上伞降回收的基础和发展展望。从我国现有的研究基础和技术储备来看,我国开展海上伞降回收已经有了一定的基础,但仍然需要进一步系统的研究和论证,以搭建完整的海上伞降回收体系。
