输水管道泄漏的探地雷达检测原理和现象机理分析
2021-08-20郭新蕾郑飞飞马朝猛柴端伍崔海涛
郭新蕾,郑飞飞,马朝猛,柴端伍,付 辉,崔海涛
(1.中国水利水电科学研究院流域水循环模拟与调控国家重点实验室,北京 100038;2.浙江大学建筑工程学院,浙江杭州 310058;3.大连中睿科技发展有限公司,辽宁大连 116002)
1 研究背景
目前我国654 个城市自来水平均漏损率高达15.7%,农村欠发达城市甚至可达到70%,城市供水管网平均产销差也达17.9%,远低于我国《水污染防治行动计划》提出的供水管网漏损率控制在10%以内的要求[1]。开展管道输水工程及城市供水管网故障预警、监测设备和定位方法的研究,是我国节水型社会建设的迫切需要。国内外对管道漏损、阻塞检测方法可分为两类:直接检测法和间接检测法[2-4]。前者主要是基于硬件检测设备,包括水听器、听漏仪、分布式光纤光栅、内窥机器人、探地雷达等,后者利用数据采集系统获得管道参数再通过各类方法,包括压力波、梯度、实时瞬变流模型等实现对管道的泄漏检测和定位[5-6]。上述方法各有优缺点,总的来说,漏损检测正由被动检漏向主动控漏方向发展。如在检测设备方面,基于探地雷达、光纤传感、智能球等新技术是当前的研发重点[1]。
探地雷达检测是当雷达发射的电磁波在传播过程中遇到存在电性差异的分界面或物体时会发生反射,根据接收到的电磁波的波形、振幅强度和时间变化等特征可推断地下介质的空间位置、结构、形态和深度。因其数据获取快速、低成本、非开挖接触和效率高等特点,使得基于探地雷达来检测管道泄漏的技术成为近20年发展起来的一种很有前景、实用性很高的无损检测方法[7-9],它的本质是通过检测由泄漏引起局部土体空洞或者土体浸润造成雷达反射波出现异常,比如雷达反射波图像中因泄漏引起管道周围土壤介电常数变化而表征出来的管道深度变化来辨识漏损位置。Stampolidis等[10]利用Pulse-EKKO雷达探测了希腊某城市的地下输水管道,成功探测出几种管道类型,并且对漏水区管道的反射模式有了初步认识。Hyun等[11]在实验室建立了缩尺模型来模拟管道泄漏,通过探地雷达初步识别了泄漏前后雷达图像的不同特征。Crocco 等[12]最早采用了微波层析的方法对管道泄漏进行了反演分析。David等[13]对探地雷达图像特征提取的可行性进行了研究,提出了一种基于多智能体系统的特征提取方法,使用密集矩阵处理GPR输出的预处理图像,并对初始数据进行分类,实现塑料管道的自动定位,之后他们的研究认为对雷达原始数据的预处理非常重要,这不仅有利于对雷达图像特征的获取,还有利于对泄漏类型的自动处理分类[14]。Lai 等[15-16]在实验室里模拟管道泄漏,绘制了PVC 管道泄漏引起探地雷达图像信号的不同扰动模式,包括反射和吸收机制,并用于识别PVC管道的现场漏水。此外,一些学者针对泄漏雷达波图像的辨识,研究应用了不同的算法和滤波器[17-18]对图像进行处理,帮助检测和定位地下管线和特定的漏损工况,以实现管道和泄漏特征的可视化,如Silvia J.等[19]采用二阶方差滤波器来突出管道和漏水等感兴趣的特征,并根据特征提取结果开发了3D模型对泄漏状况作进一步解释。
总体来说,目前国内利用探地雷达对土壤含水率探测的研究较多,但对探测管道泄漏的研究还处于起步阶段,基本停留在正态模拟,或是对管道本身的探测研究,不足是缺乏仪器设备研发和对漏水的现象、机理与反馈图像的比对,也没有相应的试验平台手段。国外在这方面的机理研究走在前列,但在以下方面也有较大不足。一是现有针对供水管道模型试验采用封闭的塑料或者木质的箱体,底板没有下渗,与现实埋地管道不符,这种情况下雷达反射波真实信号会被底板壁等干扰;二是一些学者的室内实验比尺小[15-16],埋深浅(如100 mm),这与实际输水管道埋深差距较大,同时未进行泄漏沙土分层采样对比试验;三是正在泄漏和检测停水泄漏后的状态区别较大,因为泄漏后随着时间推移,水会进一步下渗,泄漏后和正在泄漏带来的雷达反射波差异须区别对待。
鉴于此,本文首先给出了探地雷达检测泄漏的原理,搭建更接近真实埋地输水管道状态的实验室管道漏损雷达检测试验平台,首次开展系统的输水管漏水检测试验,并详细对比研究泄漏后、泄漏时等工况下雷达回波图像的异同,目的是为解析漏水现象和雷达检测机理提供支撑,并为研发漏损探地雷达检测设备和软件提供参考。
2 探地雷达检测原理及设备
2.1 检测原理图1给出了雷达波垂直管道方向扫描时发射、接收电磁波信号的示意图。可以建立双程传播时间t、电磁波在土体介质中的传播速度v与探地雷达任意位置行程L之间的关系[15]。

图1 雷达垂直地下管道扫描时雷达波发射与接收示意

式中:H为管道覆土厚度;r为管道半径;d为探地雷达系统发射、接收天线之间的距离,这里发射、接收天线耦合集成在一个盒子内,是固定值,d=10 cm。
当L=0,即探地雷达位于管道正上方时,有:

电磁波在土体介质中的传播速度v可表示为:

式中:c为电磁波在真空中的传播速度,c=30 cm/ns;ε为介质各层的介电常数,ε=εm/ε0,其中εm为介质介电系数;ε0为空气介电系数。对于管道探测或者管道泄漏探测来说,H、r和ε为未知量,需要解译雷达回波图像并辨识出来。
由上几式,可得管道埋深为:

需要指出,一般假设管道覆土介质为均质,因此ε值恒定。如雷达波扫描中遇到其它不同介质,由于介质ε值不同,雷达波传播速度和回波图像都将受到影响。
当沙土中输水管道泄漏时,水向外渗漏,浸润沙土导致土或沙的含水率增大。沙土的含水率θ与其介电常数密切有关,研究表明[20],含水率与介电常数的平方根呈线性相关,即:

随着沙土介质介电常数的增大,雷达电磁波的反射效果也逐渐增大,相应接收机接收到的能量越大,波幅振幅绝对值随之增大。
一般的,空气介电常数为1,沙土在2~6之间,而水的介电常数在81左右,正是因为二者介电常数差异较大,才使得利用雷达反射波图像中因泄漏引起管道周围土壤介电常数剧烈变化而表征出来的管道深度变化来辨识漏损位置成为现实。
2.2 便携式雷达设备本次试验所使用的便携式探地雷达是由中国水利水电科学研究院和大连中睿科技发展有限公司联合研发的管线雷达,主要由雷达发射机、雷达接收机、主控单元、显控单元、领结天线、雪崩三极管电路等部件组成。特点是:雷达接收机采用等效采样,信号发射依靠测距轮触发;经试验比对确定的探地雷达天线频率为400 MHz;软件中对原始雷达数据进行了滤波、背景消除、增益等处理,在后处理算法中采用了冰水情雷达类似的相关性层位追踪算法[21];开发了利用雷达反射波图像自动解译检测泄漏的新算法。
3 模型试验平台
为研究不同材质管道在不同覆盖层介质下的雷达回波特性和辨识算法,搭建了雷达健康检测室内试验平台。试验池几何尺寸为3 m×3 m×1 m,采用混凝土制作。为避免现有模型试验平台底板无下渗或者封闭而与真实情况不相符的不足,在试验槽底部四周每隔0.5 m布设1个排水管,且设置田字型排水垫层,用于水体下渗,尽可能复演真实情况下的渗漏特点。试验池一侧设置一个长为1m的门洞,待检测钢管呈L形,直径100 mm,埋设距离池上缘400 mm,末端封堵并设排气孔,首端球阀连接市政供水进水口和水表。与以往泄漏孔设置(仅在管道中央钻直径为2~4 mm的泄漏孔)不同,本次试验在管道中部泄漏孔上焊接一小段短管并通过螺丝行程控制多个2 mm的泄漏孔,以实现管道均匀泄漏。
当试验池埋管覆沙土后,在顶端铺设厚度1 cm的木板便于雷达测距轮行走。为便于后期数据处理分析,在木板上布设测线,分别沿管道垂直和平行方向每隔15 cm设置一条测线,共计42条,待检测管道位置处在试验池中部X11测线上,泄漏点位于管道中部正上方,测线X11和垂直于管线的Y9交点上,如图2、图3所示。

图2 管道泄漏雷达检测实验平台

图3 对应图2(c)现场试验雷达检测测线布置
试验管道泄漏工况主要分无泄漏、正在泄漏和泄漏后三种,泄漏孔方向分为正朝上和斜向上45°两种,泄漏量范围在0.01 L/s至0.1 L/s之间,该供水管道如按照0.5 m/s的经济流速考虑,上述泄漏量占正常输水流量的0.3%~3%之间,分别对应微小泄漏和小泄漏工况。分别用管线雷达沿着图3所示测线,自X1到X20,Y1到Y20进行扫描,相同工况重复2~3次,每条测线采用测距轮触发测量信号间距为1 cm,即1 cm为一个测量道号,该道号内雷达发射机垂直向下发射电磁波,在有效探测深度范围内均匀分布1024个采样点,采样间隔为49 ps,相应总时窗约50 ns。每个采样点记录因电磁波能量的不同而引起的振幅值的不同,当电磁波被介质吸收或者反射较小时,相应波的振幅也较小,反之亦然。每次行程完毕后某测线全部数据经过增益调节、背景消除、零位校正等系列处理,将呈现出完整的回波图像。需要说明的是,试验中上述数据的处理阈值仅需调整一次即可。试验时同步观测记录试验池下方排水孔排水情况。
4 现象与机理分析
4.1 无泄漏管道回波试验发现,当管道充水无泄漏时,无论泄漏孔朝上还是斜向上45°方向,干沙状态下典型测线的雷达回波基本一致,典型测线的雷达回波畸变规律一致,如图4所示。
图中横坐标代表的是雷达发射、接收机行程距离L(单位为m,其中L=100x道号),纵坐标表示雷达波的双程传播时间t(单位ns)。测线Y9垂直于管道走向,图4回波呈现双曲线图像,这也是垂直管道走向探地雷达标准回波形态。由图可知,雷达离实际管道位置越近,双程传播时间也越短,图中双曲线的顶点离管道实际位置最近。而在平行管道走向方向探测,呈现的雷达回波图像是一条平行线,反映出整个探测行程范围内探测介质的介电常数保持一致,说明管道埋深也一致,如图4(b)所示。用不同颜色代表不同波振幅强度等级,可绘出平面距离和深度方向采样点处的雷达波振幅图,其特征双曲线或直线图像亦可清晰看到。这表明,利用研制的探地雷达可以很快速的识别出管道及其走向。

图4 典型测线雷达回波图像及波振幅
4.2 有泄漏管道回波选取泄漏孔垂直朝上,微小泄漏量0.01 L/s、0.02 L/s 工况为例进行说明,泄漏时长分别为10 min、45 min。试验发现,泄漏后试验池泄漏孔附近沙的状态基本呈圆形,最终泄漏孔上方形成一个直径约10 cm 的渗透孔,深度在5 cm 左右,仅出现在表面,并未贯穿到管道漏口位置。渗透孔上下直径接近,底部逐渐收口。渗透孔出现且管道处于正在泄漏状态时,孔内充满水,而当泄漏停止时,水也随之向下渗入。试验表明,管道泄漏时(即正在泄漏)和泄漏后(泄漏一段时间后停水)的现象明显不同,对应沙内含水率(聚集存水或浸润沙土)也不同。且不同泄漏量和泄漏时间,试验池内埋深方向各层沙土浸润面积不同,这也导致各层的状态和含水率不同,如图5所示。但管道泄漏后,浸润变湿的沙相比干沙介电常数明显增大,由式(2)-(4),雷达波波速减小,走时增大,反映在图像上雷达回波下移。随着含水率的进一步增大,湿沙区域变大,雷达回波进一步下移。如果管道正在泄漏,聚集水体介电常数更大,直接导致该处雷达波形态剧烈变化。因此,有必要针对泄漏后和泄漏时两种现象进行分析。

图5 微小泄漏后、泄漏时试验池内沙的状态对比
4.3 泄漏后管道雷达回波图6给出的是微小泄漏量0.01 L/s 工况下不同Y测线上雷达回波对比图。由图可较为清晰的看到泄漏后的管道雷达回波(灰度图像,类似于图4(a)),但是不同Y测线回波图像呈现一定的扭曲变形。以Y9测线为界,距管道相同距离的测线雷达回波呈现类似图像形态,测线Y2—Y4、Y14—Y16类似,可清晰观测到管道回波,而离实际管道位置较近的Y5—Y7、Y11—Y13较为模糊,最近的Y8—Y10又变得清晰,双曲线顶点即为管线位置。此外,当接近水饱和即含水率很高时,由于水的介电常数突增,导致双曲线波形整体下移,如图中Y7—Y11测线双曲线位置。干沙状态雷达波双程走时4.9 ns左右,湿沙状态走时11 ns左右,即Y9测线双曲线顶点。根据实验现象再次确认,当管道处于强烈的水饱和处(Y8—Y10)和非饱和湿润锋处(Y2—Y4),湿润锋即湿沙与干沙分界面,水对雷达波的扰动机制是反射模式,信号强烈;当管道处于湿润锋和强烈的水饱和之间时,水对雷达波的扰动机制是吸收模式机制,此时雷达波能量会部分被吸收和削弱,呈现模糊状态。此外,当回波经过管道泄漏孔附近湿沙时也呈现一定的杂波图像。根据上述公式和波形辨识结果,可计算出该组工况下不同Y 测线平均的介电常数值,从Y2 到Y17 依次为4、4、4、5、16、20、23、24、23、19、17、5、4、4、4、4。也就是说,当沙土平均介电常数在5到20范围时,水对雷达波的扰动处于吸收模式,当该值大于20时,处于反射模式,而当该值小于5时,此时沙土基本为干沙。重复7组实验且不同泄漏量情况下,仍可得出类似图像和结论。

图6 微小泄量泄漏后Y测线雷达回波图像
图7给出的是微小泄漏量0.01 L/s工况不同泄漏时间(分别为90 min两组、240 min 两组)X11测线上雷达回波对比图。相比无泄漏的直线雷达回波图像,湿沙状态下的雷达回波呈现明显的“V”字型,且距离实际泄漏位置越近,波形越向下凸,主要原因仍然是泄漏孔附近沙的含水率最大,最为饱和,平均介电常数也最大,由此引起雷达波双程走时变长。X11测线离实际泄漏较远的位置,雷达回波模糊是因为湿润锋和水饱和区之间,水对雷达回波是吸收模式。由以上现象发现,可根据X、Y测线雷达回波图像表现出的畸变点形态对应的测线位置和双程走时时间,进行泄漏孔位置的判断,即X11测线与Y9测线的交点即为泄漏孔位置。

图7 微小泄量不同泄漏时间后X11测线雷达回波图像
4.4 泄漏时管道雷达回波限于篇幅,这里以X11、Y9测线上的雷达回波图像差异进行说明。在泄漏后工况完成后继续按原输水量供水,然后开展泄漏时数据的采集,由此形成泄漏后、泄漏时回波的对比。图8给出的是泄漏后和泄漏时典型测线X11、Y9 雷达回波对比,每组又分为不同总泄量(2.36 m3、2.69 m3)两种工况重复试验。通过上下雷达回波(图8竖向对比,图8(a1)泄漏后对应图8(a2)泄漏时图像,其余类似)的对比,发现泄漏后和泄漏时管道的回波图像畸变特征总体基本一致,唯一区别是图中泄漏时的雷达回波都出现了一个类似于箭头的回波,不妨命名为“箭形回波”,而4个泄漏后的雷达回波并未发现这种回波。原因是,当管道正泄漏时,泄漏孔附近的沙被冲出,伴随水的持续泄漏,孔口上方一直处于“存水”状态,而泄漏后工况,存水下渗到附近沙土中。因“存水”现象出现,导致该点的平均介电常数接近水的介电常数80,这表明箭形回波是管道上部持续存水对雷达波的响应。而附近湿沙平均介电常数在20到30之间,因此泄漏后工况不会出现。此外,对比分析了泄漏时工况下所有Y测线的雷达回波图像,也只在Y9测线发现该箭形回波。大量重复试验证明,箭形回波是泄漏孔位置附近回波的典型特征,也是泄漏时和泄漏后雷达图像最明显的区别。如要在管道不停水情况下检测泄漏,应重点分析泄漏时的雷达回波特征。
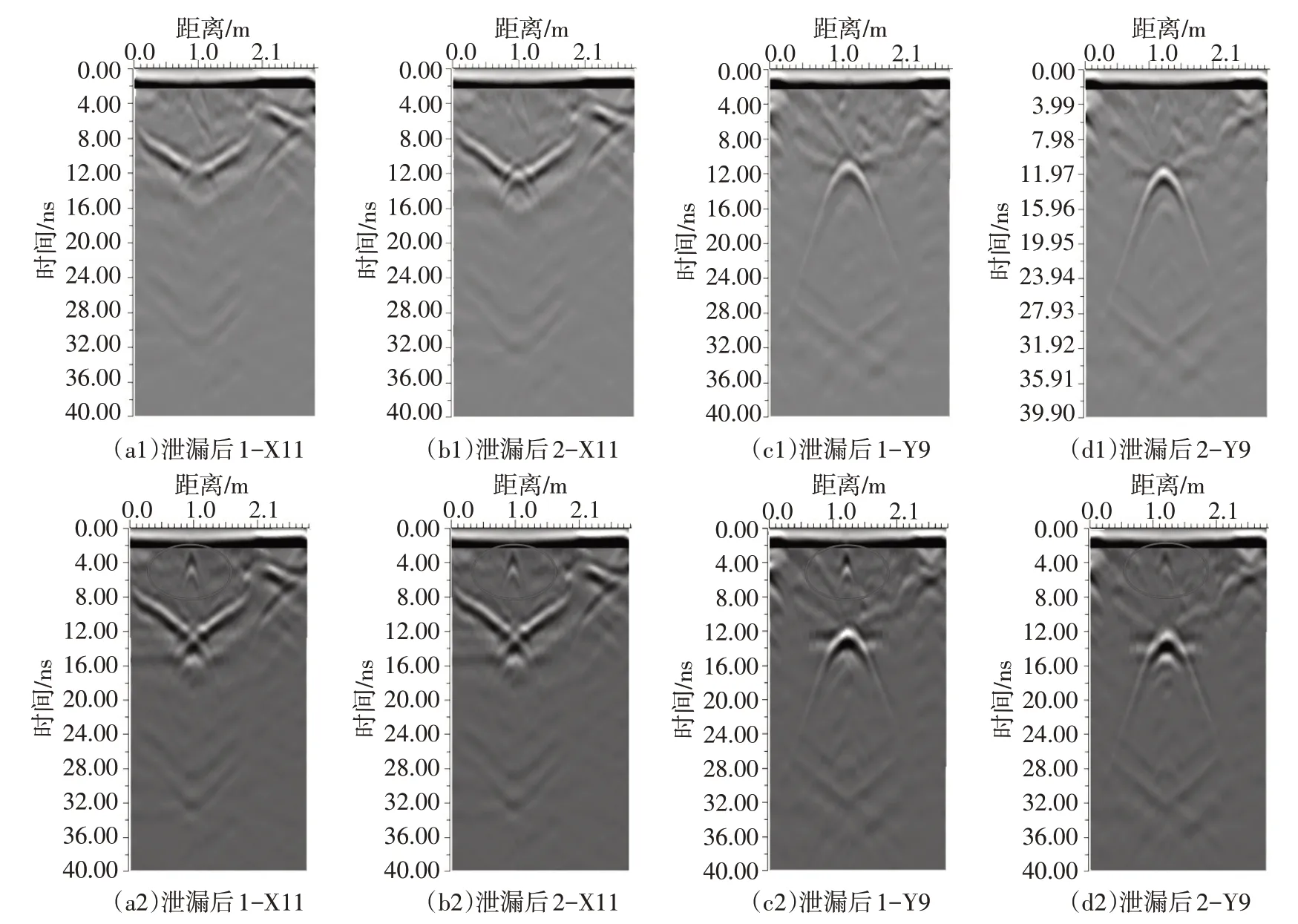
图8 小泄漏量泄漏后与泄漏时典型测线雷达回波对比
为进一步分析泄漏时不同泄漏流量的雷达回波,开展了小泄漏流量0.1 L/s的五组工况试验,泄漏总时间从18 min到85 min左右不等,同时也对比了泄漏后工况。图9、10给出的是小泄漏量泄漏后与泄漏时X11、Y9测线雷达回波对比。由图可知,同微小泄漏流量工况相比,典型测线雷达回波畸变规律基本一致,但呈现的畸变特征要更加清晰。不同的是,随着泄漏水量的不断增大,泄漏孔附近强烈水饱和的区域不断扩大,X11测线雷达回波呈现的“V”字型逐渐变为梯形,随着泄漏水量的继续增大,管道都处于强烈的水饱和范围内,对应回波波形变为直线。若管道比较长,小泄量工况管道的回波将会表现为梯形。更为重要的是,五组工况下除了有箭形回波,在管道下部还出现了明显的回波,不妨命名为“孔下回波”,如图9、图10中蓝色示意。原因是,当管道正在泄漏且泄量较大时,管道下方的水来不及渗入周围沙土中,该部分存水导致管下方介电常数显著增大出现回波亮斑,而泄漏后工况停水后泄漏水已经逐渐下渗,总体浸润后湿沙介电常数不大,则不会出现该孔下回波亮斑。X11测线的第4、5组工况也出现了孔下回波,主要原因是泄漏停水后管道内的存水还没完全经过小孔下渗下去。小泄漏量泄漏后与泄漏时Y9测线雷达回波对比也表明,正在泄漏工况均在管道下方出现孔下回波亮斑,如图10所示。
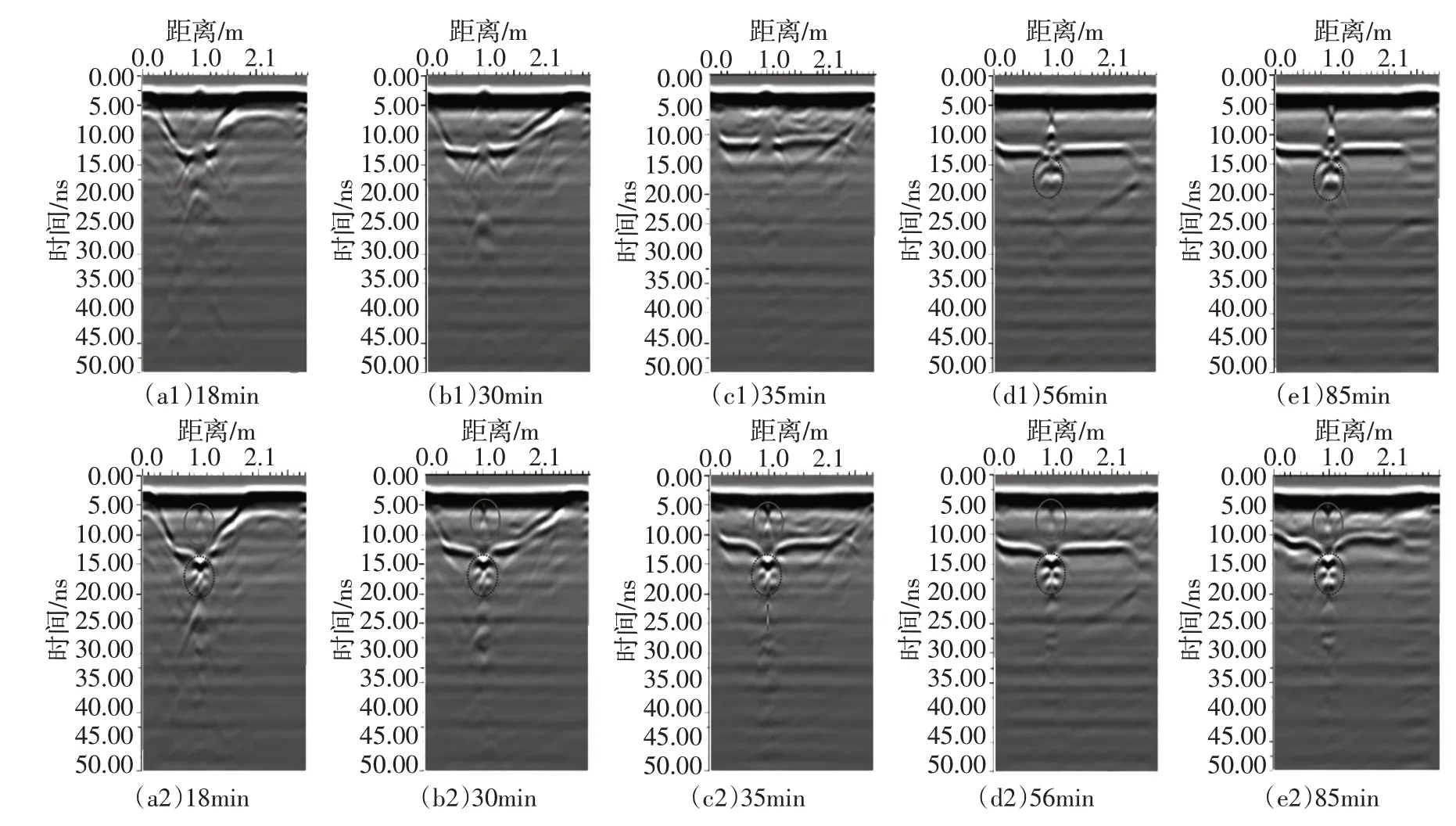
图9 小泄漏量泄漏后与泄漏时X11测线雷达回波对比(图中a1—e1为泄漏后工况,依次泄漏时间增大;a2—e2为泄漏时工况,其中泄漏时是泄漏后停水后再次开阀后量测)
图10 小泄漏量泄漏后与泄漏时Y9测线雷达回波对比(工况同图8)
为研究管道同一断面不同位置发生泄漏时是否也会出现上述现象,设置管道旋转工况,即图2(b)中管道逆时针旋转45°,其它条件不变仍按小泄漏重复上述实验,大量试验也得出同一重要结论,即“箭形回波”和“孔下回波”是区分管道泄漏时和泄漏后的雷达回波关键典型特征,尤其较为清晰的孔下回波亮斑是正在发生小泄漏的典型图像特征。因此,对于管道不停水泄漏的检测,如能从图像上辨识出“箭形回波”和“孔下回波”,即可实现泄漏的定位。此外,典型测线呈现的箭形回波和孔下回波特征除了在雷达反射图像上可以清晰辨识,从二者反映的波振幅值来看,这些典型特征均位于某一位置(或道号)波振幅值的绝对值增大区域,尤其是孔下回波,如图11所示。换句话说,针对这两个异常信息的检测,除了可以直接从图像上自动辨识,也可考虑通过设置波振幅值超出某一区间阈值来实现管道上述异常信息的识别与报警。

图11 泄漏时测线典型道号所有采样点处波振幅值变化曲线
4.5 泄漏范围识别对比为研究验证本探地雷达检测管道泄漏的有效性并反演泄漏范围,泄漏试验后开挖了试验平台内不同厚度的沙土,一方面测量开挖后每层沙土平面内湿沙轮廓尺寸,一方面将检测中所有Y测线对应上述每层沙土平面内采样点的回波振幅取出,并按照不同振幅强度等级对应不同颜色给出不同开挖深度下沙土平面的波振幅分布,蓝色表示干沙土区域,如图12所示,其开挖深度H的间隔为7 cm,H=45 cm 表示紧贴管道底部那层沙土。由图可知,试验槽表面处的湿沙土轮廓大致呈圆形,干沙土区域介质的介电常数均匀,探地雷达的接收机接收到的回波振幅值处于同一强度等级之内。湿沙轮廓线处由于水的浸润,平均介电常数增大,轮廓线处的波振幅值明显变大,且越靠近管道泄漏孔处的沙土含水率越大,相应波振幅值也发生改变。如图12(b),开挖至14 cm 处,湿沙土的轮廓大致呈圆形,沿垂直于Y测线方向测量其直径为212 cm。试验平台沙土开挖至14 cm处的波振幅值图对应所有Y测线内第100道号测量值。第Y9条测线与第Y220条测线处,由探地雷达接收到的波振幅值变化幅度较大,说明此处介质介电常数有所变化,为湿沙轮廓线,测量反演的湿沙范围为211 cm,与实测距离212 cm 很接近。当开挖至45 cm 时,试验平台内沙土全部为湿沙土,该平面上波振幅值在整个波振幅值曲线中未产生较大幅度变化,说明此处介质的介电常数基本一致。

图12 不同开挖深度下沙土干湿分界及对应平面上Y测线回波振幅值分布
此外,还对试验中管道上方泄漏空腔的形成原因和与雷达波的波振幅图进行了测量比对,证实泄漏空腔是由于泄漏水体不断淘刷泄漏孔附近沙土逐步形成,波振幅值图中可看出明显圆形分界,反演泄漏空腔直径29 cm 与实际测量吻合较好。总体来看,试验中开挖后沙土干湿轮廓与雷达波振幅值的反演吻合度较高,进一步验证了利用探地雷达检测输水管泄漏的可行性和有效性。
上述技术已初步在哈尔滨、大连等地实际管网漏损检测中应用,管线检出率95%以上,且成功找出十余个漏水点,关于实地检测试验的分析结果将另撰文详述。
5 结论
本文研究了输水管道泄漏的探地雷达检测技术,通过开展系统漏水检测试验分析了泄漏后、泄漏时等工况下雷达回波图像的异同,得到以下认识和结论:
(1)利用探地雷达检测充满水的输水管道,干沙状态下典型测线的雷达回波基本一致,典型测线的雷达回波规律一致,呈现探地雷达标准回波形态,即平行管道测线回波呈直线,垂直管道测线回波呈双曲线,且图像中双曲线的顶点离管道实际位置最近。
(2)管道泄漏后,湿沙状态下平行管道测线雷达回波下移,呈明显的“V”字型,随着泄漏水量不断增大,管道雷达回波进一步变化。垂直方向测线的回波双曲线形态更加陡峭,斜率更大,该畸变规律有利于锁定大致泄漏范围。通过试验证实了雷达发射回波清晰程度跟泄漏水对雷达波的两种扰动模式有关。
(3)大量重复试验发现重要结论,“箭形回波”和“孔下回波”是区分管道泄漏时和泄漏后的雷达回波关键典型特征,尤其较为清晰的孔下回波亮斑是正在发生小泄漏的典型图像特征,该区域也是波振幅值绝对值增大区域,且具有规律性。对于管道不停水泄漏的检测,如能辨识出箭形回波和孔下回波,即可实现泄漏的定位。
(4)不同开挖深度下的沙土干湿轮廓与雷达波振幅值的反演吻合度较高,验证了利用探地雷达检测输水管泄漏的可行性和有效性。
需要指出,目前是均质介质检测钢管的泄漏,而真实混凝土路面下方存在钢筋、石块等介质,会对雷达回波产生一定干扰,如何克制干扰辨识真实信号有待进一步研究。下一步也将进一步完善通过在雷达反射波图像中设置波振幅值阈值来实现泄漏的自动检测。
