下肢外骨骼伺服电机驱动控制方案设计
2021-08-18陈振雷熊汇雨王歆然
陈振雷,熊汇雨,郭 庆,王歆然,蒋 丹,刘 干
(1.电子科技大学 航空航天学院,四川 成都 611731;2.电子科技大学 格拉斯哥学院,四川 成都 611731;3.电子科技大学 机械与电气工程学院,四川 成都 611731)
引言
随着人口老龄化问题的日益严峻与社会对于康复医疗问题的重视程度的增加,可穿戴的外骨骼机器人已经成为了当前研究的重点与热点。下肢外骨骼机器人通过与操作员进行协同运动,帮助脊髓损伤、脑卒中或下肢损伤等疾病导致下肢运动障碍的患者进行下肢康复训练,或帮助行动不便的老年人实现日常生活的自给自足。
当前,针对不同的功能需求,多种多样的可穿戴外骨骼样机被实现。文献[1]所采用的样机由四杆机构与弯曲机构组成实现;文献[2-3]所采用的外骨骼的驱动方案为液压驱动系统;文献[4]则采用了串行弹性制动器(SEAs);文献[5]提出了一种矿用外骨骼机器人的驱动系统方案。
事实上,外骨骼是一种典型的可穿戴机器人,其通过与操作员的肢体进行相互连接从而帮助其完成特定的任务。人机耦合系统的稳定性与其控制动态性能,直接决定了操作员穿戴的舒适性与安全性。近年来很多文献针对外骨骼机器人的控制问题作出了一定的贡献[6]。文献[2]针对外骨骼提出一种迭代学习控制器;文献[7]提出一种基于学习方法的自适应控制器,解决外骨骼控制中周期性不确定项问题;文献[8-10]针对负重携行外骨骼结构进行研究;文献[11]则针对负重重心的波动问题设计了一种新型的连杆绳轮结构,减小了负重重心的轨迹波动,从而增加行走的稳定性。除此之外,一些针对于液压执行器控制算法的研究也提供了较大的启发[12-16]。
外骨骼机器人的控制模式大致可以分为“人主机辅(被动模式)”与“机主人辅(主动模式)”两种[17]。在“机主人辅”模式中,理想的训练轨迹为预先设定,不需要考虑人体意图[18];对于“人主机辅”模式,人体的实时运动意图被感知,且相对应的理想轨迹被实时生成去适应人机耦合运动[19]。人体意图感知手段一般分为感知人机相互作用(cHRI)与物理人机耦合作用(pHRI)。针对cHRI,较多文献通过测量肌电信号(EMG)来感知人体的运动意图。
本研究设计一种二自由度下肢外骨骼实验平台样机,并介绍了可穿戴式下肢外骨骼运动总体控制方案。平台样机主要作用为验证所提出的算法与理论的有效性与可行性。针对“机主人辅”控制模式,设计反步控制器并利用李雅普诺夫方法证明系统的稳定性,最终经过样机验证上述方法的有效性与可行性。
1 二自由度下肢外骨骼实验平台的设计
图1为二自由度下肢外骨骼实验平台的机械结构示意图,其可以简化为平面二连杆结构。为了保障系统的刚度与耐久性,外骨骼的机身采用不锈钢材料制成。外骨骼机器人包含2个自由度,分别为髋关节与膝关节。此外,考虑到对响应速度与整体的功率密度的要求,采用Elmo伺服电机驱动器驱动伺服电机作为外骨骼的制动单元。由于检测人机之间相互作用的传感器与连接器件安装在人机之间,会在人机耦合任务中一定程度地影响操作员与外骨骼的贴合程度与舒适度。因此,采用弯曲的大腿臂与小腿臂刚性结构,预留适当的空间并在关节处保障人机的紧密贴合。针对于不同体型的操作者,大腿臂与小腿臂的长度是可以进行调节的。如图1所示,整个下肢外骨骼的髋关节被固定在钢结构支架上,此外,整体机械腿的离地高度是可以进行调节的。
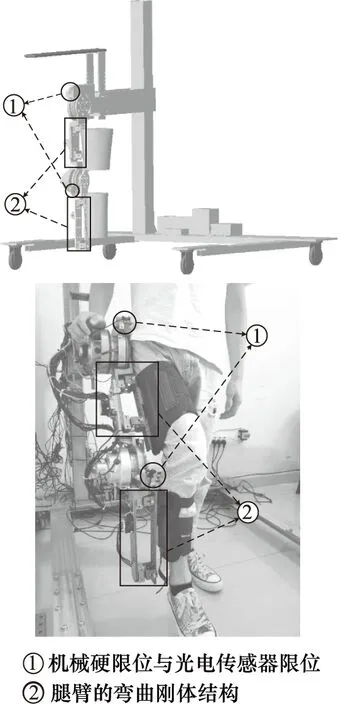
图1 二自由度下肢外骨骼实验平台结构示意图
由于二自由度下肢外骨骼实验平台的主要任务是对提出的相关算法与理论的可行性与有效性进行实物验证,为了保障实验过程操作员的安全性与舒适度,本实验平台设计了相关的保护单元。分析人体下肢的生理结构与普通步态时髋关节与膝关节的角度范围,设定3种限位保护措施来保障操作员的安全,分别为机械结构上设定硬限位、利用红外光电传感器的电子限位与软件设置的软限位。
外骨骼实验平台的电子系统也是重要的组成部分,主要负责实时数据采集、数据处理、控制指令的生成与执行等任务。电子系统依照其模块功能大致分为控制子系统、数据采集子系统与系统驱动子系统3个部分,如图2所示。数据采集子系统主要负责实验平台的实时运行状态数据的检测,并将其上传至控制子系统,主要利用三维力传感器(JNSH-2-10kg-BSQ-12)采集人机耦合力,绝对式编码器(INC-4-150,INC-3-125)采集双关节实时角度,力矩传感器(电机自带)采集双关机实时力矩;系统驱动子系统主要负责驱动外骨骼机械关节结构,从而控制子模块下发的控制信号,主要由2个伺服电机制动器(GDM1-100N2/120N2)与对应的电机驱动模块(Elmo-G-SOLHOR15/100EE)组成;控制子系统主要根据系统的实时数据及设计的控制算法生成实时控制指令(双关机驱动力矩),采用MATLAB/Simulink实现设计的控制算法并将其编译为对应的.so文件,后将其加载至硬件控制器(NI-cRIO-9035)上运行的LabVIEW中,从而实现对系统的控制。
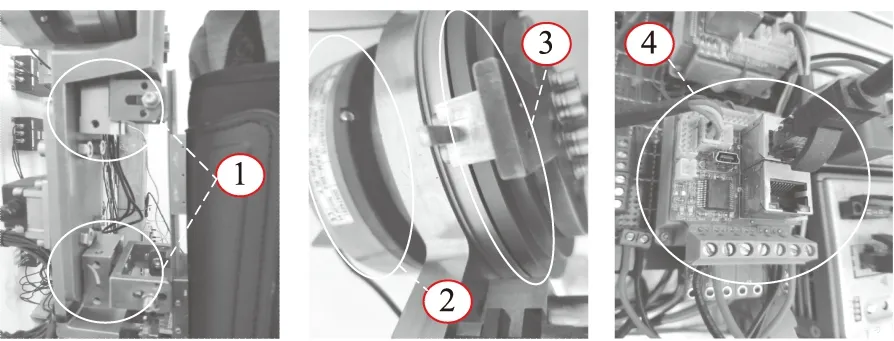
1.三维力传感器 2.编码器 3.伺服电机 4.电机驱动器图3 系统主要设备元件示意图
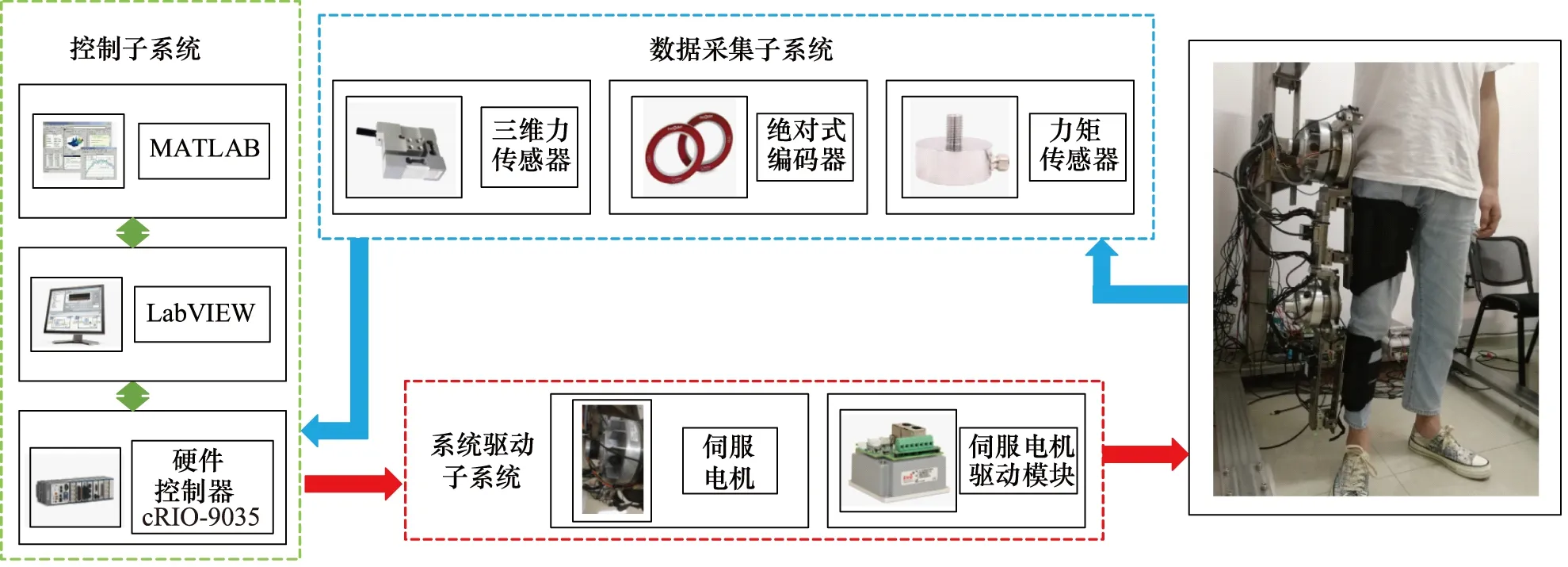
图2 下肢外骨骼实验平台电子系统示意图
2 基于反步控制的外骨骼“机主人辅”控制模式
针对于“机主人辅”控制模式,外骨骼双关节的目标轨迹xd=[x1d,x2d]T在进行康复训练之前,根据具体的康复目标提前设计。采用基于外骨骼的拉格朗日动态模型的反步控制器,保障人机耦合系统的动态性能与人体的舒适性。
根据文献[20],二自由度下肢外骨骼实验平台样机的拉格朗日模型可以描述如下:
(1)

(1) 惯性矩阵M(θ)是对称且正定的矩阵;

(2)
系统的状态误差z1,z2∈R2具体定义如下:
(3)
其中,目标轨迹xd是根据人体的行走步态预先设定的,α∈R2表示虚拟的控制变量。
根据式(3)设定的Laypunov函数如式(4):
(4)
误差z1的微分为:
(5)
故V1的微分为:
(6)
当虚拟控制量α被设计为:
(7)

(8)


(9)
最终设计反步控制器如下所示:
(10)
其中,K2∈R2×2为设定的正定常数矩阵。
将式(10)带入式(9)可以求得:
(11)
因此当t→∞时系统的状态误差z1与z2收敛至0。
3 实验分析
人体行走步态xd=[x1d,x2d]T被选定作为外骨骼机器人双关节的设定轨迹,其具体的形式如式(12)、式(13)所示。

(12)
(13)
根据设计的反步控制器(10),其中设定增益参数被设定如下K1=diag{15,15}与K2=diag{150,150}。
根据模型辨识所得到的系统参数,故实验的模型参数被设定为:
(14)
图4为采用反步控制器的下肢外骨骼样机双关节轨迹跟踪情况,图5为跟踪误差,|e1|≤0.41 rad, |e2|≤0.39 rad,可以看出,采用设计的反步控制器可以达到期望的跟踪效果与动态性能。

图4 外骨骼理想轨迹与实际轨迹的变化曲线
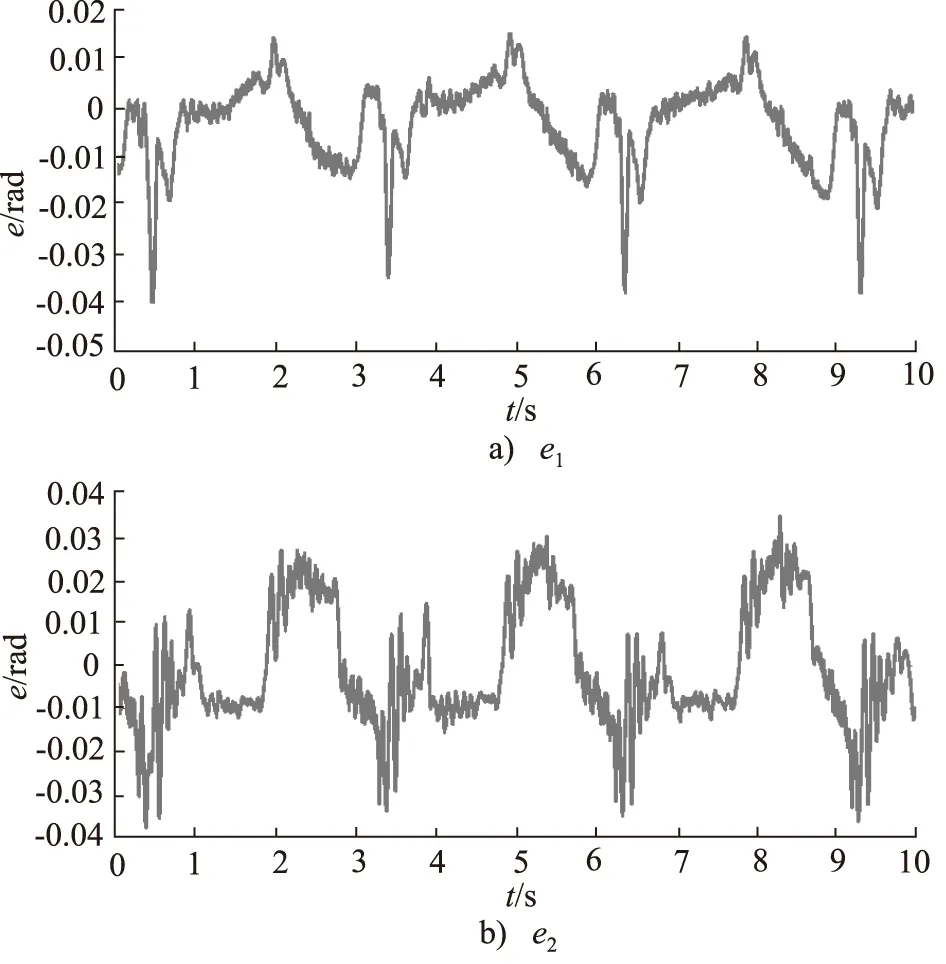
图5 双关节跟踪误差的变化曲线
图6为双关节人机耦合力矩,采样的人机相互作用力矩分别满足|T1|≤5 N·m与|T2|≤14 N·m,因此可以证明人机耦合运动的人体的舒适性。

图6 双关节人机耦合力矩
4 结论
本研究设计一种二自由度下肢外骨骼实验平台样机并介绍了可穿戴式下肢外骨骼运动总体控制方案,平台样机主要作用为验证所提出的算法与理论的有效性与可行性;此外,针对“机主人辅”控制模式,设计反步控制器并证明其在李雅普诺夫意义下的稳定性;最终经过样机实物验证上述方法的有效性与可行性。
