基于多波束馈源阵列的目标角捕获方法
2021-08-16刘增茂
刘增茂


摘要:针对我国Ka频段测控系统的发展需求,提出了一种基于多波束馈源阵列的目标角捕获方案,采用14×16馈源阵列实现了3°×3°波束覆盖空域,角捕终端采用先进的循环谱算法,实现低信噪比下的信号能量估计。该方案解决了Ka频段窄波束天线对高速飞行目标的角度捕获技术难点,为高动态目标和窄波束条件下的角度引导和捕获提供了一种解决方案,样机验证了该方案的可行性。
关键词:高动态;多波束馈源;快速捕获
中图分类号:TN822文献标志码:A文章编号:1008-1739(2021)12-61-4
Target Angle Capture Scheme Based on Multibeam Feed Source Array
LIU Zengmao
(The 54th Research Institute of CETC,Shijiazhuang 050081,China)
Abstract: In view of the development requirements of Ka-band TT&C system in China,a target angle capture scheme based on multibeam feed source array is put forward,which uses 14×16feed array to realize 3°×3°beam coverage space domain. The advanced cyclic spectrum algorithm is used in the angle acquisition terminal to realize the signal energy estimation under low SNR. The scheme solves the technical difficulties of angle acquisition of Ka band narrow beam antenna for high-speed flying target,and it provides a solution for angle guidance and acquisition of high dynamic target and narrow beam. The prototype verifies the feasibility of the scheme.
Keywords:high dynamic;multibeam feed source;fast acquisition
0引言
针对我国测控系统的发展需求,需要研制Ka频段测控设备,该频段天线与S频段相同口径天线相比天線波束要窄很多,不到S频段天线波束宽度的1/10。这对于高速飞行目标的测控来说其角速度快、角加速度较高,地面设备观测时间短,需快速对目标进行角度捕获。对于Ka频段天线相对较窄的波束特性来说使得捕获目标比较困难,因此需要解决Ka频段地面测控系统快速角引导和角捕获技术。
本文提出了一种基于多波束馈源阵列的目标角捕获方案,解决Ka频段窄波束天线对低轨高速飞行目标的角捕获技术难题,为低轨高动态目标和窄波束条件下的角度引导和捕获提供一种高可靠、低风险的解决方案。
1系统组成及工作原理
Ka频段多波束馈源快速角引导和角捕获系统由天伺馈分系统、接收分系统以及数字终端等组成。天伺馈分系统由天馈子系统、天线结构子系统、天线座子系统和伺服控制子系统组成。接收分系统由多通道角度捕获接收信道、单脉冲自跟踪主收通道以及接收监控单元组成。数字终端分系统由多通道角捕获单元、单脉冲自跟踪单元、时频单元以及终端监控组成。
Ka频段多波束快速角引导和角捕获系统组成框图如图1所示。
天线主面为抛物面,其馈源采用二维多波束馈源阵与主波束跟踪馈源相结合的设计。主波束跟踪馈源是工作于Ka频段的单脉冲自跟踪馈源,馈源设计输出左旋和路主收信号、右旋和路主收信号、左旋差路主收信号、右旋差路主收信号,并且配置有左右旋的上行功率信号接口。
在本系统中,二维多波束馈源阵采用右旋接收设计,同时,将主跟踪波束馈源中的右旋和路与右旋差路射频端口设为主用端口,后连接收设备,对于左旋信号的接收原理相同。
二维多波束馈源阵列输出的射频信号送角捕接收信道进行低噪声放大与接收下变频,变频输出后的中频信号送数字终端设备中的角捕获单元,角捕获单元通过数字信号处理,对空间目标的下行信号进行捕获与处理,提取空间目标角度信息,为伺服设备提供引导参数。
主波束跟踪馈源输出的右旋和路射频信号与右旋差路射频信号送接收分系统的主波束接收信道单元,经双通道主波束接收信道单元进行低噪声放大与接收下变频处理,输出幅相稳定的70MHz和差中频信号送跟踪接收机,跟踪接收机实现单脉冲自跟踪信号的角度误差信息提取,解调输出方位角误差电压、俯仰角误差电压和AGC电压送伺服分系统的天线控制单元(ACU)。
伺服分系统工作分为2个阶段,第1阶段是在目标捕获阶段,此时接收数字终端角捕单元输出的空间目标角度引导信息,控制天线快速捕获目标,将目标引导至天线主波束之内。第2阶段是天线对空间目标的自跟踪阶段,此时ACU接收跟踪接收机输出的方位误差电压、俯仰误差电压与AGC电压,驱动天线实现闭环自动跟踪目标。
数字终端分系统包括CPCI工控机以及相关的数字处理板、接收模拟前端板、时频数字处理板和时频模拟前端板等设备。
跟踪中频信号的接收处理,并且通过内置的开关控制单元,完成射频开关网络的射频切换,从而实现空间的波束扫描和目标搜索。
角捕终端采用先进的循环谱算法,可以实现在低信噪比下的信号能量估计。根据检测到的各路信号的能量分布情况,对目标空间位置进行判决,输出控制信息给伺服设备引导天线,将天线主波束快速指向目标,从而实现跟踪主波束对目标的初步捕获。
受限于初步捕获的有限精度,初步捕获后目标既可能落入系统主跟踪波束主瓣,也可能落入主波束副瓣。如果目标被天线主波束捕获,并且跟踪接收机输出的误差电压与AGC等信号满足自跟踪条件,则可以直接转自跟踪,实现从捕获到跟踪的平滑过渡。初步角捕获之后,如果目标处于主跟踪波束主瓣之外,由于不具备转自跟踪的条件,按照约定的工作流程,系统需重新回到角度捕获阶段,然后再根据更新后的目标空间角度数据控制天线重新对目标进行角度捕获。如此循环往复,直至目标被天线主波束主瓣捕获。
2多波束馈源阵列系统捕获方案
2.1多波束馈源波束覆盖特性设计
本系统采用多波束馈源扩大了天线波束的覆盖范围,当目标进入到天线波束的覆盖范围后,后端处理设备计算产生引导数据,引导天线中心馈源对准目标,当目标进入天线主波束后达到自跟踪条件适时启动自跟踪,实现跟踪闭环。
综合考虑天馈系统的相关技术参数及系统对各波束交叠情况的实际需求,确定多波束馈源的外围阵列为14×16方阵,中心4个馈源位置空出用于放置主馈源。据此建立了计算模型,14×16多波束馈源阵列模型如图2所示。
经计算,得出了多波束天线波束覆盖示意图,3dB波束宽度覆盖示意图如图3所示。
2.2接收信道设备设计
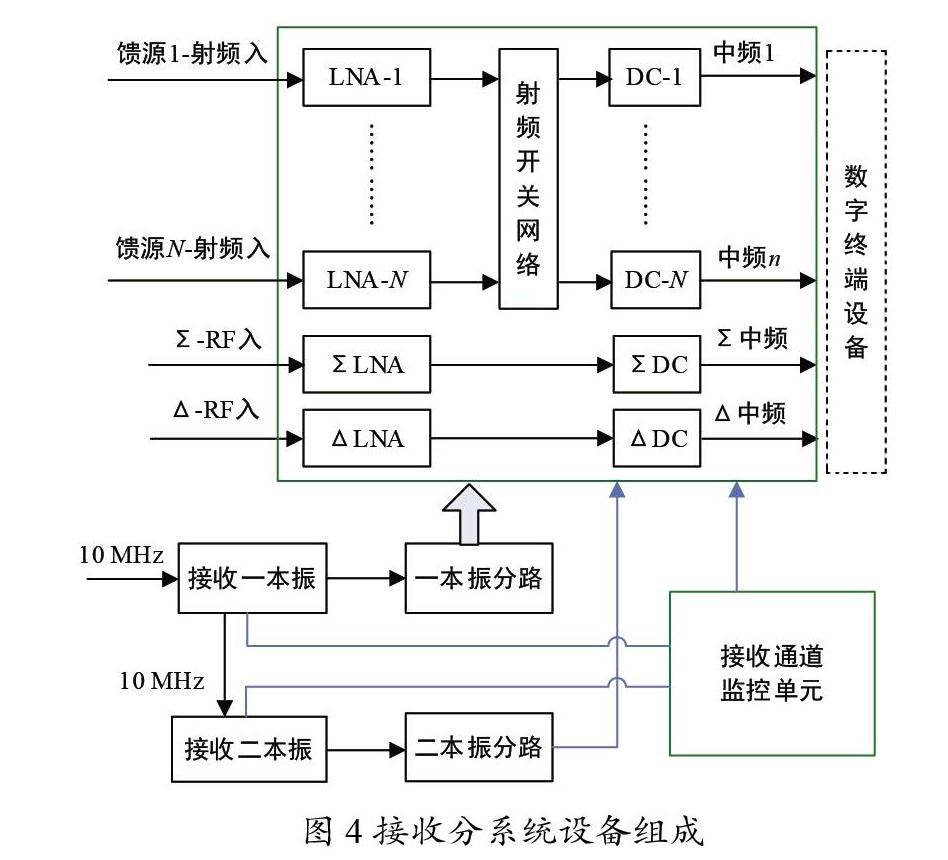
接收信道设备实现对馈源阵列输出信号的射频接收,并且通过内置的有源开关变频单元和接收下变频器将下行的射频信号变频到中频,送数字终端处理设备。接收分系统由角捕获接收通道、主通道接收链路、接收一本振、接收二本振,以及接收通道监控单元等设备组成。接收分系统设备组成如图4所示。
2.3数字终端设计
数字终端完成多路中频信号的能量采集、角捕获和角跟踪处理,从而完成对高速运动目标的快速角捕获参数提取和实时自跟踪链路角误差解调,由多通道角捕获单元、单脉冲自跟踪单元、时频单元以及终端监控组成。
任务前,馈源阵列天线面处于目标等待点。目标进站后,会有部分馈源(若干相邻的馈源)接收到下行信号,接收到下行信号的馈源随机地分布在馈源阵列的各个方位。如果接收到信号的馈源没有分布在馈源阵列的中心,不利于伺服分系统进行角跟踪,因此找到目标在馈源阵列中的位置,并将该位置移动到馈源阵列的中心位置是本分系统的首要任务。
通过计算馈源阵列各个馈源接收到的信号能量可以得到信号在馈源阵列中的位置。为减少后端设备量及成本,本方案多波束扫描方法是通过控制馈源阵列射频开关网络来实现对馈源信号的扫描,射频开关网络的控制线由主机的主板发出。主板发出开关控制信号后,向其他副板发出通知信号,命令其他副板接收信号并进行信号能量处理,副板能量计算结束后通过串口通信按指定格式將能量值送主板。
主板检测多波束馈源阵列各个馈源接收到的信号强度,在设计过程中可以设定一个能量门限值,以判断馈源阵列是否真正接收到下行信号。如果扫描结束后,得到能量值的最大值小于门限说明没有接收到下行信号,计算的能量值无效,需要进行新的扫描。如果得到能量值的最大值大于门限值,说明目标已经进站,计算的能量值有效。在工程实现中也可以通过接收机监控软件设置此门限值。接收机具有参考门限后,在馈源阵列处于等待点时就可以开始对馈源阵列进行扫描。方案在得到大于门限的能量值前的扫描为等待扫描阶段,从等待扫描结束到将目标在馈源阵列的位置移动到馈源中心点位置间的扫描为角捕获扫描阶段。等待扫描主要用于判断目标是否进站,角捕获扫描主要完成找到目标在馈源阵列中的位置,并将该目标位置移动到馈源中心位置的任务。
3Ka频段多波束馈源角捕获样机
Ka频段多波束馈源角捕获样机如图5所示,天伺馈线分系统包括208个接收偏馈、1个收发主馈、天线面、天线座架、ACU及ADU等。接收分系统包括高度集成接收208路Ka接收组件、Ka主波束和差双通道接收信道、Ka链路由二次变频本振、分路网络、Ka开关矩阵及监控系统等组成。角捕波束综合基带包括共32通道中频接收处理通道的处理板卡和成像处理软件、监控软件。主波束角跟踪基带分系统包括单音信号自跟踪和低信噪比调频信号角跟踪两部分。
4结束语
根据上述方案,完成了样机研制。通过汽车携带Ka信标跑车来模拟动态目标进行了试验,试验过程中分别模拟了目标进入多波束视场、目标捕获、目标跟踪和目标跟踪结束的完整过程。重复进行了多次不同方向的跑车试验,都成功验证了多波束自动捕获、目标自动跟踪的完整过程。试验说明了利用多波束馈源阵列实现高动态目标快速角度捕获的方案是可行的。
参考文献
[1]袁朝晖,杜彪,金超.Ka宽频带卫星通信馈源系统[J].现代电子技术,2008(15):163-165.
[2]赵军,是湘全,谷亚林,等.接收阵列天线的时—空二维谱估计[J].南京理工大学学报(自然科学版),2004(5):511-515.
[3]闫冯军,夏传浩,洪一.Ka波段微带下变频器[J].电子工程师,2005(11):26-28.
[4]吴海洲,王志国,王鹏毅.基于帧格式的调频遥测信号检测方法分析[J].无线电工程,2012,42(5):18-20.
[5]罗奎,李仰志,赖广峰,等.微弱GNSS信号捕获中的能量累加方法[J].数字通信世界,2010(5):28-31.
[6]陈希,张锐,帅涛.基于FFT的GPS快速并行捕获算法[J].宇航学报,2011,32(1):162-166.
[7]陈金广.目标跟踪系统中的滤波方法[M].西安:西安电装科技大学出版社,2013.
[8]胡建华,徐健健.一种基于遗传算法和卡尔曼滤波的运动目标跟踪方法[J].计算机应用,2007(4):916-918.
