基于激光多普勒的杯形波动陀螺频率裂解测量
2021-08-16李靖轩孙小燕于亚龙胡友旺
李靖轩,孙小燕,于亚龙,林 星,胡友旺
(1.高性能复杂制造国家重点实验室,湖南长沙 410083;2.中南大学机电工程学院,湖南长沙 410083)
0 引言
杯形波动陀螺是固体波动陀螺的一种,利用谐振子的振动产生驻波,进而敏感转动角度产生哥氏效应,实现角速度的测量[1-2]。与传统的机械转子陀螺相比,杯形波动陀螺的结构更为简单,具有精度高、稳定性好、使用寿命长等优点。
由于杯形波动陀螺的振动幅度较小,且附加质量会对陀螺的振动特性产生影响,因此频率的测量应尽量采用非接触式的方法。激光多普勒测振仪作为一种典型的非接触式测量仪器,具有频率响应范围大、动态范围宽、高精度、高分辨率等特点,被广泛应用于微器件的振动测量[3-4]。
本文设计了扫频激励、单频激励2种激励方案,在周向不同方位对陀螺进行激振,利用激光多普勒测振仪进行振动信号的采集,实现了陀螺频率裂解的准确测量,并对陀螺的低频轴与高频轴进行了区分,为陀螺的调谐与性能表征提供了支持。
1 测试原理
1.1 陀螺基本工作原理
杯形波动陀螺有驱动模态与检测模态2个工作模态,如图1所示,两者在周向相隔45°。陀螺利用哥氏效应实现角速度的测量,当激励位于驱动模态方位、激励的频率与谐振子的固有频率相同时,驱动模态的驻波被激励出来,谐振子做四波腹运动;当有轴向角速度输入时,陀螺谐振子上振动各点受到哥氏力作用,检测模态被激励出来[5-7]。

图1 杯形波动陀螺工作模态
将陀螺谐振子视为只在自身平面内振动的薄弹性环,建立谐振子的环形模型。克里莫夫等人证明,受外分布载荷作用时,圆环的运动微分方程可以表示为如下形式[8]:
(1)

假设作用于谐振子的激励力为F=Asinωt,由于谐振子沿切向变形很小,可近似认为pv=0,则可得到pw的表达式为[9]
pw=f(φ)Asinωt
(2)
式中

式中θ表示激励作用范围。
将f(φ)在[0,π]范围内进行傅里叶展开,由于仅分析谐振子在工作模态下的振动,因此只保留圆周角的二次谐波,得到激励法向分量表达式为
(3)
代入式(1),则圆环的运动微分方程为
(4)
该方程的解可以表示为以下形式:
w(φ,t)=p(t)cos2φ+q(t)sin2φ
(5)
将式(5)代入式(4),使用布勃诺夫-加廖尔金法,可以求得谐振子在外部激励作用下的边缘位移为
w(φ,t)=k2sinωtcos2φ+k4sinωtsin2φ
(6)

当没有角速度输入时,谐振子边缘位移只有k2项,只在驱动模态振动;当有角速度输入时,谐振子的运动则是工作模态与检测模态振动的合成。
理想情况下,两工作模态的谐振频率是一致的。但受谐振子材料不均匀性、加工误差等因素影响,谐振子工作时驱动模态与检测模态的固有频率间存在差值,称之为频率裂解[10-11]。此时由于质量偏差四次谐波的存在,理想谐振子中的驻波被破坏而发生进动,谐振子的振动过程可以表示为2个谐波振动和的形式[12]:
w(Φ,T)=Acos2φcos2φ0cosω1t+Asin2φsin2φ0cosω2t
(7)
式中:A是谐振子的振动幅值;φ0是波相对于低频轴的方位;ω1、ω2分别是两工作模态的振动频率。
当激励不位于驱动模态或敏感模态所在方位,而是处于两工作模态之间时,陀螺的振动是两工作模态振动的叠加,同时包含2个模态的振动信息,通过采集此时的振动信号并进行频谱分析,即可实现频率裂解的测量。
1.2 激光多普勒测振原理
激光多普勒测振仪利用光的多普勒效应测量物体表面的位移和速度[13-14],其工作原理如图2所示。激光源发出的激光束,由分光镜分解为同频率同相位的测量光束和参考光束;测量光束通过透镜聚焦在被测物体的振动表面,光波的频率发生变化,经振动表面反射至光敏元件处;通过计算测量光束与参考光束的频差,即可求得被测件的振动速度:
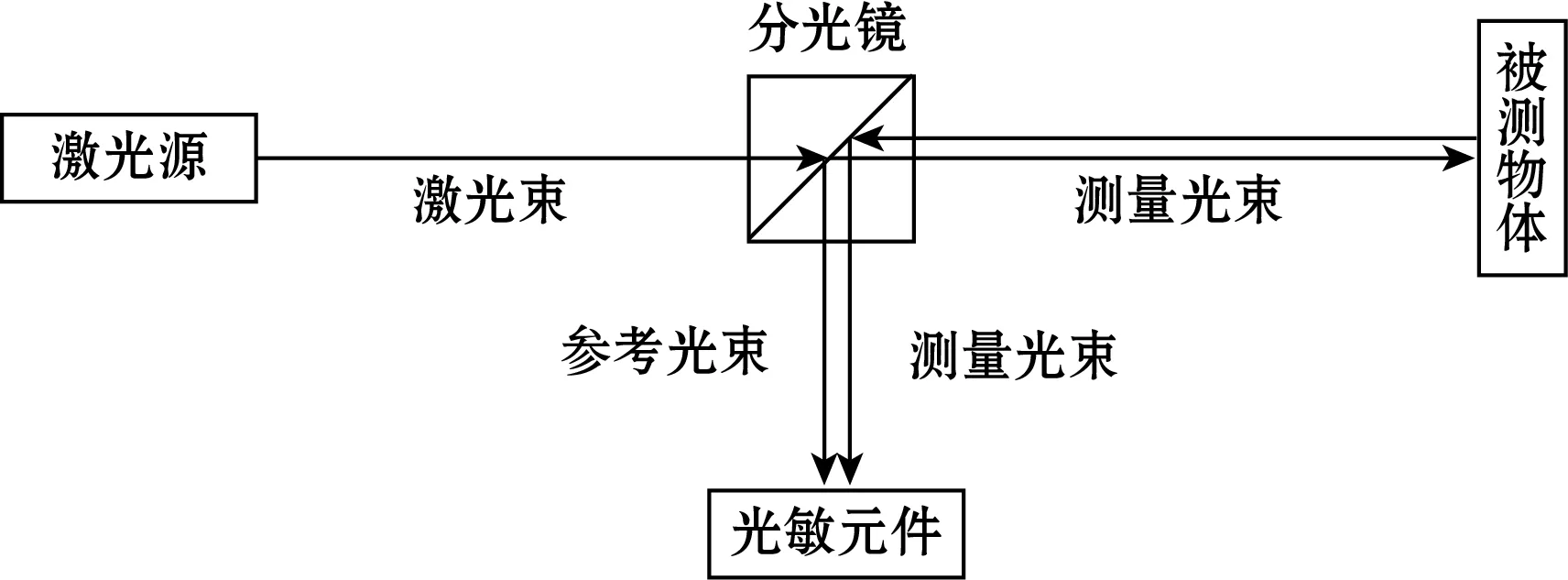
图2 激光多普勒测振原理
(8)
式中:Δf为测量光束与参考光束的频差;v为被测结构振动速度;λ为激光波长。
2 测量方案设计
2.1 激励方式与激励信号的选取
只有当激励位于两工作模态之间时,采集的振动信号中才同时包含2个模态的振动信息。杯形波动陀螺通常采用压电驱动的方式,且压电片的粘贴位置与两工作模态所在方位一致,无法实现2个工作模态的同时激振,因此必须选择其他的激励方式。
常见的非接触式激励方式主要有声激励、静电激励和磁激励。由于声激励装置简单易于实现,且当激励源与陀螺距离较近时,可以认为激励源产生的声波具有较好的指向性,因此本文选择麦克风作为陀螺的激励源。为保证陀螺被充分激振,所选用的麦克风应具有充分的输出功率,这使得麦克风尺寸较大,因此在麦克风前设置了一中心开有圆孔的挡板,以保证声波准确的激励目标位置。
常用的激励信号有正弦激励、冲击激励和随机激励,其中,冲击激励和随机激励一般用于激励出被测件的所有振动模态[15]。由于只关心陀螺两工作模态的谐振频率,无需激发其他模态,且正弦信号易于控制,因此选择正弦信号作为陀螺的激励信号。
2.2 实验装置
激光多普勒振动测试系统如图3所示,主要由信号发生器、麦克风、激光多普勒测振仪、计算机组成。信号发生器产生频率和幅值一定的激励信号,施加到麦克风的两驱动端,使麦克风产生高频振动。麦克风在振动过程中对周围的空气产生周期性压力,传导至陀螺谐振子的目标激励位置,实现谐振子的驱动。谐振子的振动信号由激光多普勒测振仪采集,并传送至计算机进行分析处理,实现陀螺频率的测量。

(a)原理示意图

(b)实验装置图图3 激光多普勒振动测试系统
3 实验与讨论
测量陀螺的频率裂解时,根据激励源与陀螺的相对位置,既可以同时激励2个工作模态,同时测量两模态的谐振频率,也可以单独激励2个工作模态,分别测量两模态的谐振频率。针对上述两种情况,本文采用扫频信号、单频信号两种激励信号,分别开展实验。
3.1 同时激励两工作模态
扫频激励是用频率缓慢变化的正弦信号对结构进行激励,当频率变化率小时,可以认为实际的测量数据具有稳态响应的特征;当响应出现最大幅值时,即表明是该振动模态的固有频率。测量时,首先在大频率范围内进行粗扫频,确定陀螺的大致谐振频率;然后在谐振频率附近进行细扫频,实现频率裂解的测量,细扫频时主要参数设置如表1所示。

表1 扫频主要参数值设置
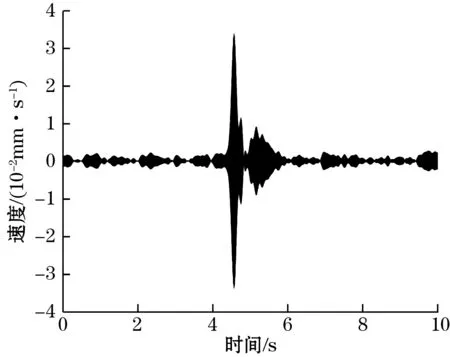
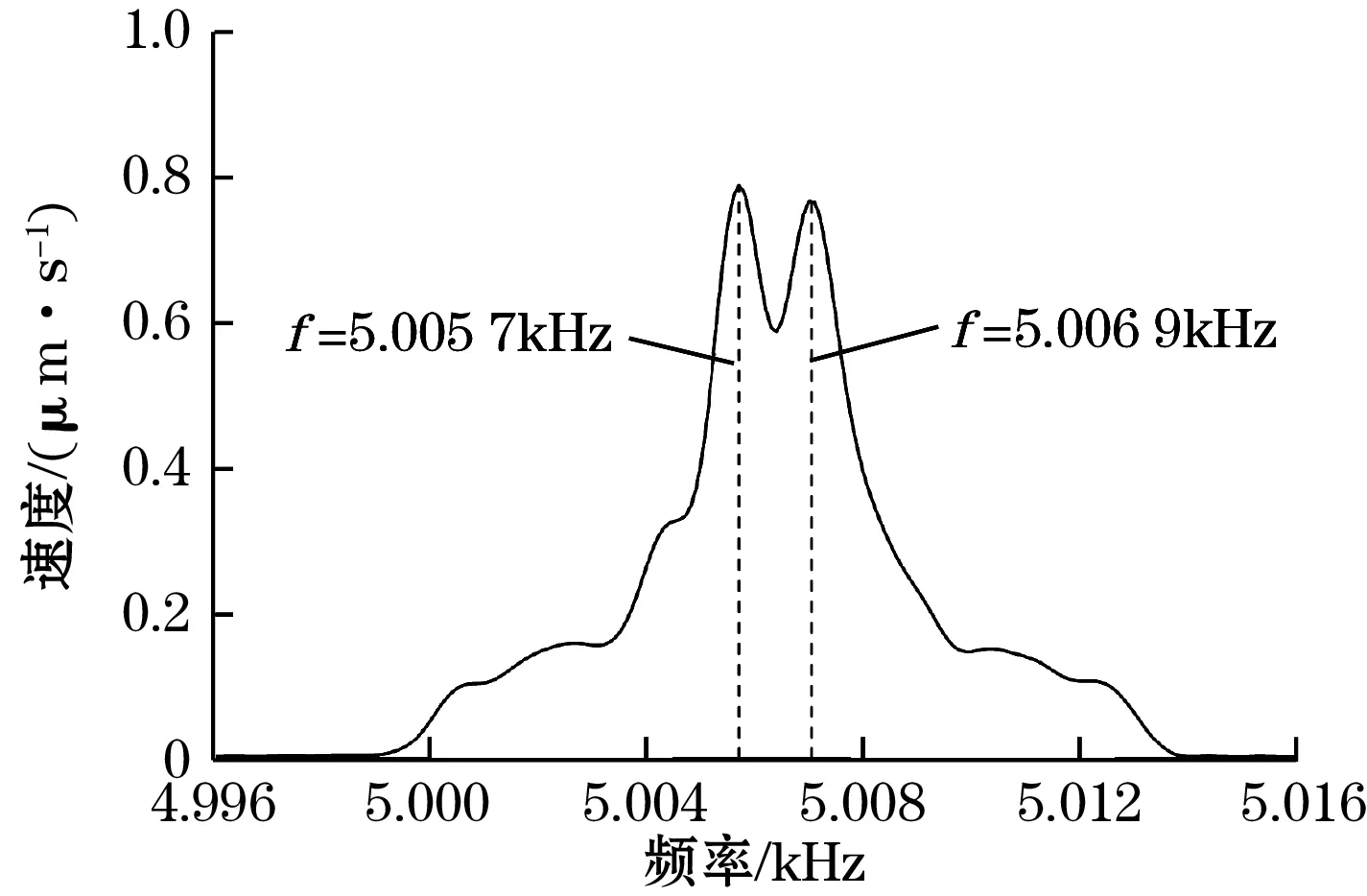
扫频激励所测得的时域信号及对应频域信号如图4所示。随着激励信号频率的增长,陀螺谐振子的振动速度不断增大,并出现第一个峰值,该峰所对应的频率即为一个模态的谐振频率;随着激励信号频率继续增大,由于逐渐远离第一个模态的谐振频率,导致振动速度减小;当激励频率靠近第二个模态谐振点时,振动速度再次增大,直至到达谐振点而出现第二个峰值。

(a)时域图

(b)频域图图4 扫频激励双模态
单频激励信号的频率固定、幅值不变,具有激励功率大、信噪比高、信号稳定的特点。测量时,设置单频信号的频率为5 100 Hz,略高于陀螺的谐振频率;当陀螺受激振动一段时间后,撤除激励信号,使陀螺作衰减振动,并由激光多普勒检测该过程的振动信号。在衰减过程中,陀螺的振动频率会经过两工作模态固有频率而发生谐振,振幅显著增加,通过对信号进行FFT变换,即可实现频率裂解的测量。
单频激励所测得的时域信号及对应频域信号如图5所示。初始时段,由于陀螺振动频率远离两模态谐振频率,所以振动很微弱;随着衰减振动的进行,出现了2个振动速度显著增加的峰值,这2个峰所对应振动频率即为2个模态的谐振频率。由于衰减过程中能量损耗较快,导致时域第二个峰值明显小于第一个峰值。
(a)时域图
(b)频域图图5 单频激励双模态
采用上述两种激励信号进行多次测量,所得数据如表2所示

表2 同时激励两模态频率测量值 Hz
为衡量两种激励方案的测量稳定性,引入标准差作为评判依据。扫频激励方式下,A、B模态频率测量值的均值分别为5 005.742 Hz和5 006.935 Hz,标准差分别为0.026 7Hz和0.020 6 Hz;单频激励方式下,A、B模态频率测量值的均值分别为5 005.717 Hz和5 006.983 Hz,标准差分别为0.068 7 Hz和0.146 2 Hz。单频激励较扫频激励的标准差更大,主要是由于陀螺在空气中振动衰减很快,导致采样时长较短,而FFT变换的分辨率与采样时长成反比,使得分辨率较低,可通过真空环境测量的方式加以改善。
扫频激励、单频激励所测频率均值基本一致,频率裂解分别为1.193 Hz,1.266 Hz,两者的测量结果具有较好的一致性。
3.2 分别激励两工作模态
将麦克风分别对准陀螺的2个工作模态,采用扫频信号、单频信号分别进行激励,所测得的数据如图6、图7所示,此时,陀螺的振动中只包含某一模态的振动信息,因此时域图中的振动速度只出现单个峰值。
采用2种激励信号进行多次测量,所得数据如表3所示。

表3 分别激励两模态频率测量值 Hz
扫频激励下,A、B模态频率测量值的均值分别为5 005.877 Hz、5 006.957 Hz,标准差分别为0.017 0 Hz、0.026 2 Hz;单频激励下,A、B模态频率测量值的均值分别为5 005.950 Hz、5 007.067 Hz,标准差分别为0.050 0 Hz、0.047 1 Hz。2种激励方案仍具有较好的测量稳定性。扫频激励、单频激励所测频率均值基本一致,频率裂解分别为1.080 Hz、1.117 Hz,频率裂解的测量结果仍具有较好的一致性。
在上述2组实验中,单频激励方案由于采样时间短,频率分辨率较低,因此测量稳定性较扫频激励略差,但能够实现谐振频率与频率裂解的快速定位;扫频激励方案频率分辨率较高,测量稳定性较好,但前期一般需多次粗扫频以确定细扫频的参数配置,且单次测量耗时较长。可以将两种激励方案相结合,先通过单频激励,实现谐振频率与频率裂解的快速确定;再通过扫频激励,实现谐振频率与频率裂解的准确测量,从而在保证测量准确性的同时,使测量效率得到提高。

(a)A模态时域图

(b)A模态频域图

(c)B模态时域图

(d)B模态频域图图6 扫频激励单模态

(a)A模态时域图

(b)A模态频域图

(c)B模态时域图

(d)B模态频域图图7 单频激励单模态
3.3 低频轴与高频轴的区分
在采用去除质量式方法对陀螺进行调谐时,需要在陀螺谐振子的低频轴位置进行材料去除,使低频轴的固有频率增大。因此需要对低频轴与高频轴进行区分,以便在调谐前明确修调位置;在调谐后判断是否发生高低频轴的交换,避免过修调现象的发生。
低频轴与高频轴的区分可以在3.1节扫频方式测量频率裂解完成后进行。将谐振子转动一定角度,则激励会靠近某一工作模态并远离另一模态,根据式(7),靠近的模态时域幅值会增大,远离的模态时域幅值会减小。由于扫频方式为低频率向高频率步进,因此,第一个峰对应低频轴,第二个峰对应高频轴;设第一个峰与第二个峰的幅值之比为β,当β<1时,说明激励在靠近高频轴;当β>1时,说明激励在靠近低频轴。按照表1的扫频参数对谐振子进行激励,同时利用激光多普勒测振仪记录谐振子的时域振动信号,所得波形如图8所示。

(a)顺时针转动谐振子

(b)逆时针转动谐振子图8 低频轴与高频轴的区分
当陀螺谐振子沿顺时针方向转动一定角度时,得到图8(a)所示波形。此时β<1,说明激励在远离低频轴而靠近高频轴,所以低频轴在激励的顺时针方向。也可以将陀螺谐振子沿逆时针方向转动一定角度,测量结果如图8(b)所示。此时β>1,说明激励在靠近低频轴而远离高频轴,所以低频轴在激励的顺时针方向。谐振子转动方向的不同对低频轴与高频轴的判断结果没有影响。
4 结束语
针对杯形波动陀螺的频率裂解测量问题,本文设计了扫频激励、单频激励两种激励方案,在周向不同位置实现陀螺的激振,并利用激光多普勒测振仪实现振动信号的采集。测量结果表明,在同时激励两工作模态或分别激励两工作模态情况下,两种激励方案均能够实现陀螺谐振频率与频率裂解的稳定测量,且测量结果具有较好的一致性;在此基础上,还对陀螺的低频轴与高频轴进行了区分,为陀螺的调谐与性能表征提供了保障。
