自动驾驶汽车环境感知系统传感器技术现状及发展趋势
2021-08-15詹德凯
詹德凯
(辽宁省交通高等专科学校,辽宁 沈阳 110122)
1 引言
智能网联汽车,即ICV(全称Intelligent Connected Vehicle),是自动驾驶汽车与车联网的有机联合,是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、后台等智能信息交换共享,实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车。[1]
根据车辆是否需要通信联网自动驾驶智能汽车又分成自主式和协同式两种形式。顾名思义,自主式就是基于车辆自身的车载装置像人一样具有环境感知能力,像人一样具有决策能力,并能最终形成加减速、转弯、刹车等车辆控制能力。协同式则在自主式的基础上还需要借助于其他车辆和路端基础设施发来的信息来共同完成自动驾驶行为。比如现在比较火的车路协同V2X(指车辆和X的通讯,X:车、路、行人及互联网等)技术等[2]。但就目前来说,还是自主式自动驾驶汽车更为常见。
自主式自动驾驶汽车主要由环境感知系统、中央决策系统和底层控制执行系统三部分组成(见图1)。
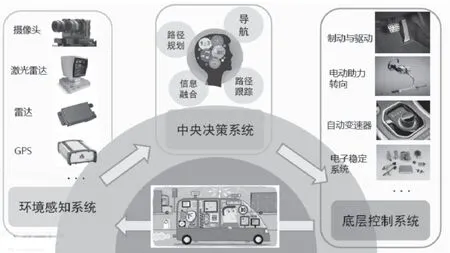
图1 自主式自动驾驶汽车系统架构图[3]
本文着重介绍环境感知系统的组成、各部件的主要技术特征、作用及发展趋势等。
2 自动驾驶汽车的环境感知系统
2.1 系统组成
环境感知系统是自动驾驶汽车中的基础关键环节。通过环境感知传感器,自动驾驶系统可获取周围的道路、车辆等环境信息,结合自身的定位、车辆状态等信息,决策规划系统做出相应的决策,规划出可行驶路径,并控制自动驾驶车按照规划的路径行驶。环境感知系统常见的传感器包括摄像头、激光雷达、毫米波雷达和超声波雷达等[4]。实际上,受传感器自身技术条件的限制,没有一种传感器能够满足所有的场景需求,为了保证系统的鲁棒性和可靠性,自动驾驶汽车都需要传感器具有高冗余度,都采用多种车载传感器。
图2是环境感知系统的常见传感器组成和其大致的感知范围。

图2 环境感知系统传感器组成及感知范围
2.2 传感器介绍
2.2.1 摄像头
摄像头(Camera)是环境感知系统中应用最广泛的传感器。摄像头相当于车的“眼睛”对目标(车辆、行人、交通标志)进行识别、跟踪和测量,感知到汽车周边的障碍物以及可驾驶区域,理解道路标志的语义,从而对当下的驾驶场景进行完整描述。基于图像的物体检测和识别技术已经相当成熟,近几年,基于深度学习的视觉感知算法甚至已经超过了人类的水平。通常,自动驾驶车上会安装多个摄像头,兼顾不同的视角和任务。
摄像头利用了光学成像原理,光线透过摄像头镜头后,被感光元器件捕获,最后形成图像。
摄像头主要有以下几个性能指标。
(1)像素:是摄像头的主要性能指标,它决定了图像的清晰程度,分辨率越高,图像细节的表现越好。
(2)焦距:也是摄像头的重要性能指标,焦距越大,视场角越小,远处的物体越清晰。焦距越小,视场角越大,近处的物体越清晰。
(3)帧率:帧率越高,表示单位时间内拍摄的照片越多,拍摄速度越快。
(4)信噪比:信噪比越高表明产生的杂波信号越少,图像信号质量越好。
按照部件内摄像头数量,分为单目摄像头和双目摄像头。
(1)单目摄像头:单目摄像头由1个摄像头组成,结构简单,成本低,但是无法测量准确的距离。
(2)双目摄像头:双目摄像头由2个摄像头组成,由于2个摄像头之间的距离已知,可以估算出空间距离,但是标定和计算量较大。
按照摄像头的焦距,分为长焦和短焦两种。
(1)长焦摄像头:焦距长,看的距离远,在拍摄远处的景象的时候更加清晰。在自动驾驶车中,用来发现远处的交通状况和红绿灯识别。
(2)短焦摄像头:短焦短,用来发现近处的物体,视野范围比长焦宽。障碍物识别、车道线检测和场景分割等多个任务都需要用到短焦摄像头,往往车上会集成多个短焦,覆盖整个车的视野范围。
按照类型划分,除了最常见的摄像头之外,还有事件摄像头、全景摄像头、深度摄像头和红外摄像头4种新型相机。
(1)事件摄像头(Event Camera)。事件相机中的每个像素独立响应亮度的变化,通过捕捉亮度变化成像,因此对运动物体捕捉效果非常好,并且不受曝光时间限制,成像速度非常快。普通摄像头在高速运动状态下会出现运动模糊,而事件摄像头则很好的解决了这个问题,图3为两者的效果对比。
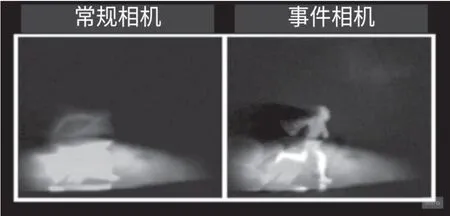
图3 普通摄像头和事件摄像头效果对比
(2)全景摄像头(Omnidirectional Camera)。全景相机有360°的采集视野,解决了单个相机视野范围不足的问题。全景摄像头通过多枚鱼眼镜头进行拍摄,然后把拍摄好的照片拼接起来,组成全景照片。全景照片技术已经非常成熟,已经应用在VR看房等场景,对导航,定位和地图制图都很有帮助。 但其边缘畸变非常严重,需要算法处理之后才能正常显示。
(3)深度摄像头(Range Camera)。深度摄像头能够获取环境的深度和颜色信息,图4为摄像效果图。目前有3种深度测距方法:结构光测距、飞行时间法和双目视觉测距。深度摄像头能够探测的距离非常有限,主要还是应用在室内场景的三维重建。

图4 深度摄像头效果图
(4)红外摄像头(Infrared Camera)。红外摄像头通过热成像原理对行人进行检测,目前在自动驾驶中还没有大规模应用。
摄像头的优、缺点主要有:
优点:摄像头的成本低、成像像素高、刷新频率快,被广泛应用。主要应用于车辆,行人和车道线检测;摄像头能够获取颜色信息,用来做红绿灯检测和交通标志识别;摄像头拍摄的图片经过场景分割用来做场景应用。
缺点:在逆光或光影复杂的地方使用效果差;依赖于算法,依赖样本的训练来识别物体,样本未覆盖的物体无法辨别;摄像头对于行人的识别具有不稳定性,因为行人动作、服装、身体各部分变化要素很多,还要与街上的建筑、汽车、树木等背景图案区分开来,不易识别。
因此,摄像头的物体识别功能虽然无可比拟,但由于怕光、依赖样本算法、对于行人识别的不稳定性,在应用于测距领域无法保证100%的稳定性。
更高级别的自动驾驶环境感知系统需要更高性能且互为冗余的传感器,在远距离摄像头技术发展方向上发展趋势在于多功能立体摄像头。它的技术特征是有更高的像素,更广的视场角和集成多种人工智能算法。特别是在算法方面,目前较为先进的做法是通过分类器引擎、深度学习、密集光流法等核心算法实现多层次场景的可靠理解从而优化摄像头的性能。图5是博世新一代立体摄像头的算法示意图。由此可以看出核心算法的优化提升是发展趋势。

图5 博世新一代立体摄像头算法[5]
近距离摄像头的发展上以更高像素和支持与超声波传感器数据融合方面为主,具有行车记录仪功能,可以实现更精确的遥控泊车,高级自动泊车功能。
2.2.2 激光雷达
激光雷达是自动驾驶车中最重要的传感器之一,绝大多数自动驾驶方案都选择配备激光雷达。虽然成本较高,但出于安全性的考虑,激光雷达仍然是自动驾驶车的首选。
激光雷达(Light Detection and Ranging,Li-Dar)是光检测和测距的缩写,通过对外发射激光脉冲来进行物体检测和测距。它的基本原理是向被测目标发射探测信号(激光束),然后测量反射或散射信号的到达时间、强弱程度等参数,以确定目标的距离、方位、运动状态及表面光学特性。如果采用多束激光并且360度旋转扫描,就可以得到整个环境的三维信息。激光雷达扫描出来的是一系列的点,因此激光雷达扫描出来的结果也叫“激光点云”。图6为激光雷达扫描的点云效果图。

图6 激光雷达扫描效果图[6]
激光雷达主要有以下几个性能指标:
(1)线数:线表示激光雷达系统包含独立的发射机/接收机的数目,线数越高,代表单位时间内采样的点就越多,分辨率也就越高。多线的配置使得激光雷达在每秒内可构建高达百万的数据点。目前自动驾驶车一般采用32线或64线的激光雷达。
(2)视场角:视场角决定了激光雷达能够探测的视野范围,分为水平视场角和垂直视场角。视场角越大,代表视野范围越大,反之则代表视野范围越小。
(3)角分辨率:角分辨率分为水平角分辨率和垂直角分辨率。水平角分辨率是指水平方向上扫描线间的最小间隔度数。它是随扫描帧频的变化而变化,转速越快,则水平方向上扫描线的间隔越大,水平角分辨率越大。垂直角分辨率指的是垂直方向上两条扫描线的间隔度数。
(4)探测距离:激光雷达最远探测距离一般为150-200米,实际上距离过远的时候,采样的点数会显著变少,测量距离和激光雷达的分辨率有着很大的关系。以激光雷达的垂直分辨率为0.4°最远探测距离为200米举例,在经过200米后激光光束2个点之间的距离为1.4米,也就是说只能检测到高于1.4米的障碍物。如图7所示。

图7 激光雷达探测距离
目前激光雷达有效的探测距离可能只有60-70米。如果要分辨具体的障碍物类型,那么需要采样点的数量更多,需要更高线数的产品。
(5)扫描帧频
激光雷达点云数据更新的频率。对于混合固态激光雷达来说,也就是旋转镜每秒钟旋转的圈数,单位Hz。例如,10Hz即旋转镜每秒转10圈,同一方位的数据点更新10次。
激光雷达的分类方式较多,主要有按激光雷达扫描线束数量的多少来分和按照激光雷达有无机械旋转部件来分。
按激光雷达扫描线束数量的多少可分为单线激光雷达和多线束激光雷达。顾名思义,单线扫描一次只产生一条扫描线,其所获得的数据为2D数据。多线扫描一次可产生多条扫描线,目前市场上多线束产品包括4线束、8线束、16线束、32线束、64线束等。最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上。
按激光雷达有无机械旋转部件来分类,包括普通的机械式旋转激光雷达、混合固态激光雷达、不旋转全固态激光雷达等。
激光雷达的优、缺点主要有:
优点:激光雷达能够准确探测障碍物的大小和距离,分辨率高;激光雷达对光照的变化不敏感,在有光照变化和夜晚等场景基本不会受到影响;激光雷达能够提供水平360度的视野范围,保证整个自动驾驶车基本上没有视野盲区。
缺点:激光雷达惧怕雾霾天气,因为雾霾颗粒的大小非常接近激光的波长,激光照射到雾霾颗粒上会产生干扰,导致效果下降;相同频段的激光雷达互相干扰比较严重;激光雷达还比较昂贵,这也是推广激光雷达的障碍之一。
除了障碍物感知,激光雷达还可以用来制作高精度地图。
最后,激光雷达还可以用来做定位,自动驾驶车在行驶过程中利用当前激光雷达采集的点云数据帧和高精度地图相匹配,可以获取自动车的位置。
为了实现更高级别的自动驾驶,环境感知系统在雷达方面(包括激光雷达和毫米波雷达)需要探测性能有显著提升。主要表现在需要更远的探测距离;更广的水平视角;更高的带宽及在距离、速度及角度的分辨率上需要更高的精度。这样在雷达的点云密度上比上一代需要至少提高10倍以上。
2.2.3 毫米波雷达
毫米波雷达(Radar)和激光雷达的原理类似,只不过其载体是电磁波而不是激光,毫米波雷达通过发射和接收电磁波来检测物体的距离和速度。目前已经上市的高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)基 本上都带有毫米波雷达[7]。
毫米波雷达的原理是通过发射电磁波,然后接收反射回来的信号,通过电磁波返回的时间差计算目标的相对距离,通过多普勒效应产生的频率偏移来计算目标的相对速度。
毫米波雷达主要有以下4个参数指标。
(1)最大探测距离:能够探测到障碍物的最大相对距离,一般为250米。
(2)最大探测速度:能够探测到障碍物的最大相对速度,一般为240km/h。
(3)视场角:能够探测到的视野范围,水平范围一般为±60°,垂直视角一般为±15°。
(4)最大探测目标数:最大能够探测的目标数量,一般为24-32个。
雷达按照测量的距离划分为短距离雷达和长距离雷达。
短距离雷达:探测的范围比较大,但是探测的距离比较短。
长距离雷达:探测的范围比较窄,但是探测的距离比较长。
毫米波雷达的优、缺点主要有:
优点:毫米波雷达的体积小,安装之后对汽车外观的影响不大;毫米波雷达能够同时检测多个物体的距离、角度和相对速度,特别是高速移动的物体;毫米波雷达测量距离也比较大,最大探测距离可达250米,并且能够穿透雾和粉尘,还能够适应各种不同的天气。
缺点:毫米波雷达的测量角度受限,特别是垂直角度;毫米波雷达采样的点比较稀疏,分辨率比较低,很难识别体积比较小的物体;雨、雾和雪等高潮湿环境的衰减,以及大功率器件和插损的影响会降低毫米波雷达的探测距离。
2.2.4 超声波雷达
超声波雷达(Ultrasonic Radar)通过发射超声波计算障碍物的距离,它的工作原理比较简单,这里就不多说了。
超声波雷达探测的距离非常短,受温度影响较大,探测距离一般在1-3m,只能在短距离测距时使用。
目前超声波雷达主要应用在倒车雷达、自动泊车等配置中,一般自动泊车系统都搭载数枚超声波雷达来检测停车车位。
为了实现更高级别的自动驾驶,环境感知系统对下一代的超声波雷达的要求是更广的探测范围和更快的系统刷新时间。从而解决其探测视角和探测反应速度不够的问题,将来能够支持低速的紧急制动等主动安全行为。
2.3 传感器性能及应用对比
前一节介绍了自动驾驶汽车环境感知系统不同类型的传感器,为了方便对比将各类型的传感器的各项性能指标对列表1如下:

表1 传感器的性能指标对比
由于工作原理不同,每种传感器都有自己的优势和劣势,利用其长处来实现其价值,满足其在环境感知方面的不同应用。具体见表2所示:

表2 传感器的优缺点和应用方向对比
从以上两个表格可以看出,不同的传感器互有优缺点,单一的传感器并不能解决所有问题。自动驾驶汽车要安全运行,必须保证多传感器协同工作和信息冗余。因此,传感器融合,多种传感器协同工作,优势互补,共同组成环境感知系统是自动驾驶汽车发展的必然。
同时,除了车辆自身进行环境感知,借助外界手段获取信息,也越来越被重视。例如,车路协同技术就是通过V2X技术实现车和车、车和外界环境的信息交互,从而实现超越车辆自身车载传感器的感知能力。
3 总结
智能网联汽车是近年来汽车领域的发展趋势,是先进技术的发展方向,相关的技术更新和新技术层出不穷,日新月异。本文介绍了自动驾驶汽车环境感知系统的组成和工作方式,重点阐述了各种传感器的工作原理、技术参数、技术类型、产品的应用方向等。同时对不同类型的传感器的性能指标、优缺点及应用方向等做了详细的对比。
目前自动驾驶汽车处于从有条件自动驾驶阶段向完全自动驾驶阶段过渡。这对环境感知系统传感器的技术参数提出了更高的要求,产品技术升级也是势在必行,更多精度高、反应速度快、传输速率高的产品必然会逐步取代现有产品。