水下定位声线扰动分析与分段指数权函数设计
2021-08-14王薪普薛树强曲国庆刘以旭杨文龙
王薪普,薛树强,曲国庆,刘以旭,杨文龙
1.山东理工大学,山东 淄博 255049;2.中国测绘科学研究院,北京 100830;3.山东科技大学,山东 青岛 266590
水下高精度时空服务是海洋开发活动的重要支撑[1]。我国陆地大地基准网建设相对完善,并且长期复测维持,具备厘米级精度[2-4]。随着我国北斗系统的建成,构建从深空到深海全域无缝的综合PNT体系将成为未来大地测量与导航的重要技术方向[5-6]。文献[7—8]较全面地描述海底大地基准网建设的主要技术问题和海洋导航技术的研究现状,水下高精度声呐定位模型和算法是海底空间基准构建及其声呐导航定位应用的重要基础。
由于卫星定位采用的无线电磁波在海水中衰减严重,而声波在水中具有良好的传播性,因此水下高精度导航定位多采用声学定位系统[9-10]。然而,海洋环境复杂,水中介质不均匀,声速会随温度、深度、盐度的变化而变化,声波在海水中传播时存在声线弯曲和延迟误差,是制约水下高精度定位的瓶颈问题[11-12]。一方面,水下定位通常需要通过声速剖面观测获取定位所需的声速信息。然而,而声速剖面存在测量误差以及时空代表性误差等[13-15],进而影响水下高精度定位。另一方面,由于入射角越大声线弯曲越明显,从而影响测距精度进而影响定位精度[16-20]。
为解决声线弯曲误差对高精度定位的影响,文献[21—24]对声线弯曲误差问题提出了不同的解决方法。在卫星定位方面,多位学者对随机模型进行了大量研究,提出高度角随机模型、信噪比随机模型、最小范数二次无偏估计模型及其简化形式、实时钟差融合权函数设计等随机模型[25-27]。文献[28]给出弹性定位导航授时(positioning,navigation and timing,PNT)的基本定义,提出需要研究海洋环境自适应弹性定位模型。构建合理的随机模型是水下高精度定位的关键技术之一,然而,目前多采用观测量等权模型,已有高度角相关模型也多仿照GNSS提出。为提高水下定位精度,文献[27]在分析随机模型不完善基础上,提出4种基于入射角的水下定位随机模型,改善等权随机模型的定位精度,其影响机理和模型的合理性还有待深入研究。
本文考虑海洋声速场变化对声线的扰动,基于常梯度声线跟踪模型推导入射角、梯度以及深度扰动对声线传播水平位移的影响函数关系,通过试验分析入射角出现扰动时对水平位移的影响,依此建立入射角相关的水下定位随机模型,采用浅水湖水下实测数据进行试验分析验证,与已有的权函数模型进行对比分析。
1 入射角、梯度及深度扰动对声线传播的影响
受海水温度、压力、盐度等因素影响,声速在垂向方向存在明显的分层变化现象,导致声线传播发生折射弯曲,影响定位精度。通常,在同一分层中,假设声速梯度是一个常数,其声线折射如图1所示。

图1 声线折射Fig.1 Illustration on the sound ray refraction
依据常梯度声线跟踪模型,声线掠过某一水层时的水平位移y可表示为[13]
y=R(cosβ-cosα)
(1)
式中,α为入射角;β为层内的出射角度;R=-C0/(gsinα),为声线传播的曲率半径;C0表示入射声速。α与β满足Snell方程,即
sinβ=sinα(C0+gh)/C0
(2)
式中,g=ΔC/h为声速梯度。显然,若将β、R视为过程变量,可将水平位移表示为α、g、h的函数,即
y=f(α,g,h)=
(3)
在声线跟踪定位算法中,入射角是需要迭代计算的量,即可表示为声速剖面观测值的函数,因此也是一个随机量。由式(3)可知声线传播的水平位移由入射角α、梯度g和深度h共同决定。为研究上述变量对水平位移的影响,对式(3)中的α、g、h求偏导

(4)

(5)
(6)
经过化简可得式(3)全微分为
dy=(Rsinα-(Rtanβsinβ+y)cotα)dα+
(7)

类似于声速剖面简化思想,为了节省计算效率,建议将声速剖面简化为3~4个分层,其中每一层的声速梯度利用最小二乘方法进行线性拟合,可得如下常梯度声速剖面模型
Ci=Ci,0+gih
(8)
式中,Ci,0为在第i个分层内的初始声速;gi为层内的梯度(采用层内声速剖面数据的最小二乘估计);h∈[0,li]为层内深度变量;li为第i层的厚度。此时,水平位移总扰动则可由多层扰动累加得到,即
dy=dy1+dy2+…
(9)
需要指出,上述分层简化策略只是为了计算方便。
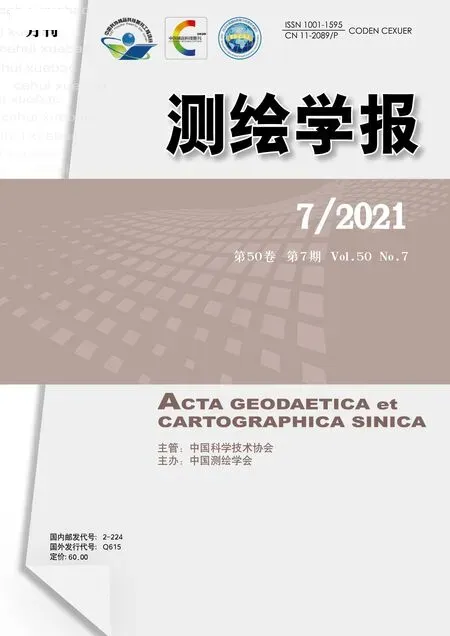
为了直观给出水平位移与入射角的响应关系,采用60 m实测声速剖面进行试验。声速剖面和拟合剖面如图2所示,声速剖面大致可以分为两部分,以分段方式进行声速剖面拟合,计算入射角扰动对水平位移的影响。测试深度分别为30 m和60 m,入射角范围为20°~80°,分别加入中误差为0.005 rad~0.02 rad(0.286 5°~1.145 9°)的随机误差,模拟次数为1000次,统计1000次的水平位移扰动信息,计算水平位移扰动的样本方差,结果如图3所示。
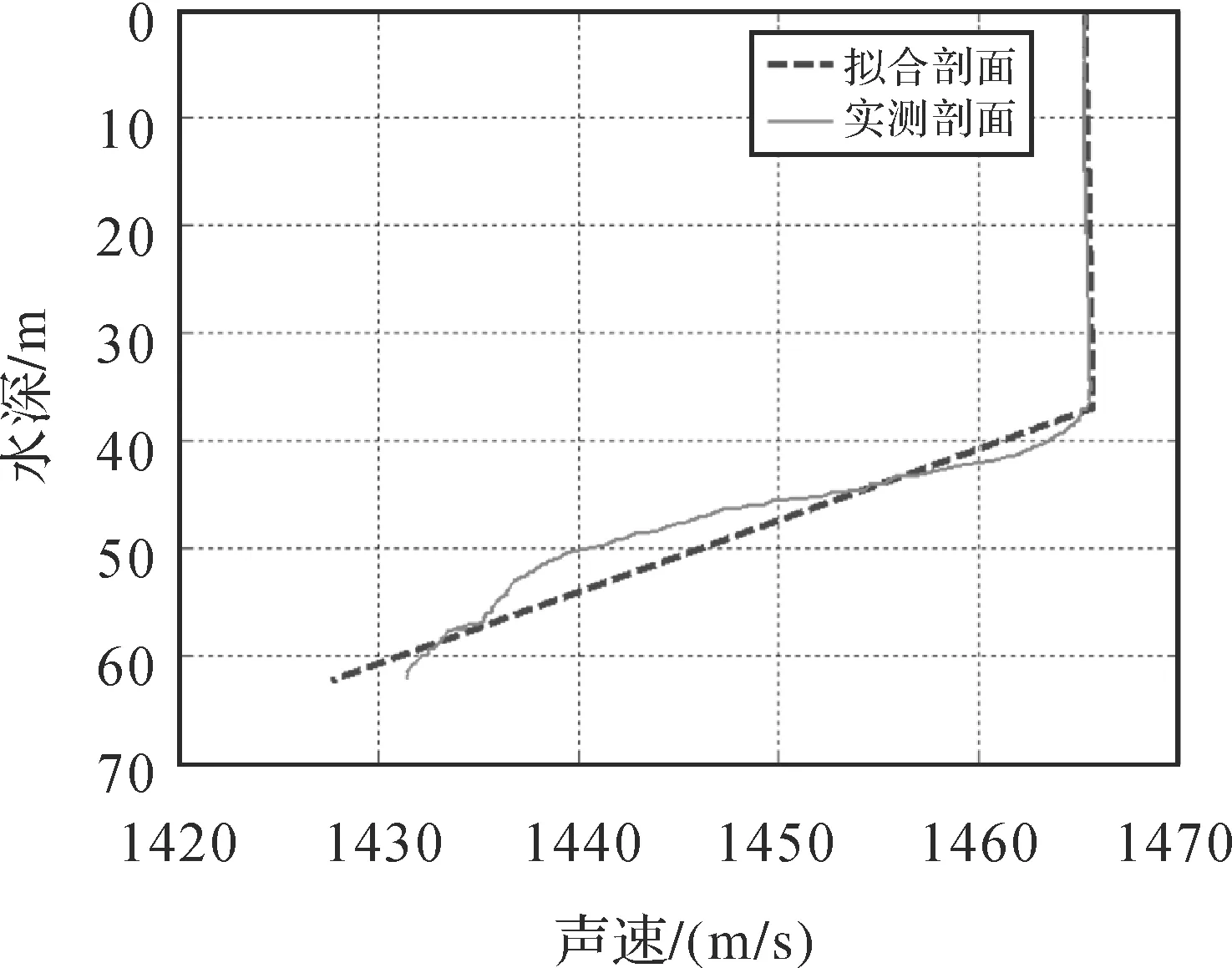
图2 分段线性拟合声速剖面Fig.2 Piecewise linear fitting sound velocity profile

图3 不同深度时入射角扰动对水平位移扰动的方差Fig.3 Variance of incidence angle disturbance to horizontal displacement disturbance at different depths
给梯度加入-0.05~-0.15误差,计算梯度扰动对水平位移的扰动,结果如图4所示。
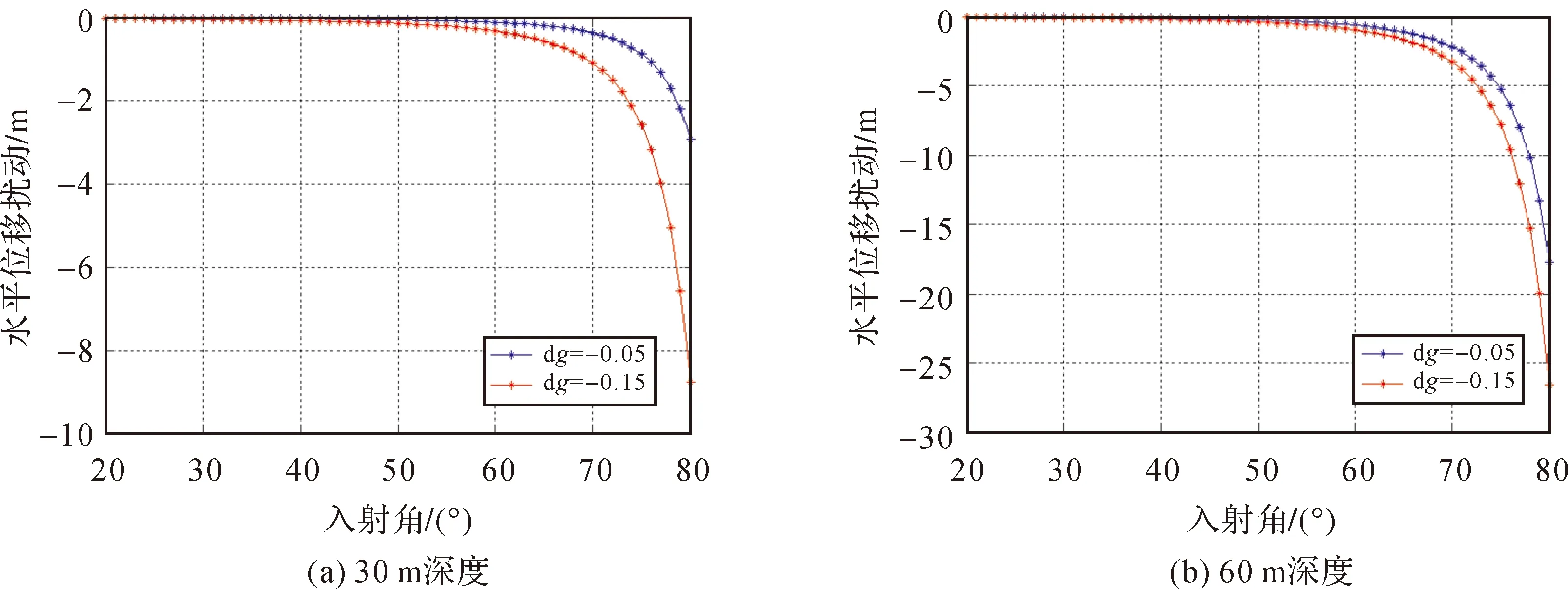
图4 不同深度下声速梯度扰动对水平位移扰动Fig.4 The horizontal displacement is disturbed by gradient disturbance at different depths
从图4可以得出以下结论:
(1)在入射角较小时,声速场梯度变化对水平位移的扰动较小。
(2)在相同水深和入射角下,水平位移的扰动随着梯度变化增大而增大。
(3)在相同深度和梯度下,水平位移扰动总是随着入射角的增大而增大。
在实际测量中,声速场存在或多或少的测量误差,并且声速场是随时间变化的,在声线跟踪计算时只能利用某一时刻的声速场观测信息代表声呐观测时刻的声速场信息,因此总是存在声速梯度误差及其时变影响。据此,可基于上述响应关系构建水下定位随机模型。
2 顾及入射角的权函数设计
假设Ti(i=1,2,…,n)时刻由GNSS和姿态测量给出船载声呐换能器的位置Xi=(xi,yi,zi),海底应答器待定坐标为X=(x,y,z),声呐信号传播时间为ti,海底应答器定位观测模型为
Li=cti=f(Xi,X)+Δi+εi(i=1,2,…,n)
(10)

(11)

随机模型的不完善通常归结于定权不准确[27],观测权函数设计是构建随机模型的关键。对于相同的声速场误差和深度,大入射角对声线的水平位移影响越大,进而影响水下定位精度。因此,构建以下入射角相关观测权函数
(12)

观测方差大致可分为两部分,即入射角相关部分和入射角不相关部分,后者主要来源于声呐仪器测量误差。当入射角大时,则入射角相关误差占主要成分,由图3可知,此时仪器测量误差可以忽略。从图3中可以看出,无论30 m深度还是60 m深度时,当入射角大于50°时,入射角扰动对水平位移的影响开始有上升趋势,在深度60 m,入射角80°时,即使入射角加入0.005 rad的随机误差,水平位移的扰动方差达到了84.206 3 m2。可见,当入射角较大时,入射角发生微小变化对水平的影响是指数增长的,即方差随入射角的变化呈指数形式变化。为此,本文使用指数函数模型拟合观测方差
(13)
式中,a、b为待估计量,可根据图3相关数据进行拟合得到。以60 m水深0.005 rad误差为例,拟合结果如图5所示。
图5 方差拟合Fig.5 Variance fitting
入射角扰动或声速场扰动变化的具体量级未知或很难精确获取。试验表明,加入不同量级的扰动误差,对声线的扰动绝对量级影响很大,但对式(12)建立的权函数的扰动却很小,其原因在于观测权是观测值间精度的相对量。如图6所示,给出不同量级的入射角随机扰动误差,拟合入射角相关方差函数式(13),并采用式(12)构建观测权函数,最终得到的权函数设计几乎完全相同。说明本文所建立的权函数具有很好的适应性,而入射角的扰动量级设置较为灵活。试验表明,依据声速梯度扰动对声线传播扰动影响进行权函数设计时,与依据入射角扰动得到的权几乎完全相同。
从上述权函数曲线可以发现,分段指数权函数曲线和IGG3抗差方案具有类似的权函数图形,因此其在抑制大观测误差方面的功效可较好体现[31-32]。
图7显示在入射角0°~89°时的不同权函数的对比情况,直观体现出分段指数权函数模型和已有的入射角指数函数模型、分段余弦函数模型。
从图7可以看出,指数模型在抑制大入射角时效果不够明显,分段余弦函数模型在分段节点处出现权值不连续现象。
3 实测数据分析
为验证本文的权函数模型的有效性,采用浅水湖实测数据进行验证分析。以圆标校声线跟踪定位结果为未知点真值,测量船轨迹和定位点位置如图8(a)所示,圆标校引起对称性可很好地消除声线系统误差影响,可获取高精度平面定位[33]。
采用如图8(b)所示的导航轨迹数据比较分段指数权函数模型与等权模型、指数函数模型、分段余弦函数模型的定位效果,其C2、C6、C8各个控制点对应的入射角如图9所示。
为分析本算例入射角相关误差的大小及其与本文权函数设计的关系,采用圆测线标校水下控制点结果作为参考值,计算观测距离误差,入射角和观测误差绝对值的对应关系,如图10所示(以C2为例)。结果表明,大入射角观测的误差相对更大,说明当入射角大时,对测距的影响较大,从而影响定位精度,所以对大入射角观测值进行降权处理是有必要的。
基于前文试验结果,使用入射角阈值为50°,以声线跟踪算法计算3个定位点C2、C6、C8的圆标校结果,比较等权模型、入射角指数模型、分段余弦模型、分段指数权函数模型与圆标校定位结果差异,结果见表1。
从表1可以看出,分段指数权函数模型和分段余弦权函数模型的定位结果更接近圆标校定位结果,两者定位结果没有显著差异。以C2为例,相较于圆标校结果,分段指数权函数模型比分段余弦权函数模型在X方向提高了0.019 m,Y方向降低0.013 m,Z方向提高了0.005 m;分段指数权函数模型的定位结果相较于等权模型的定位结果在X方向提升了4.134 m,Y方向提升了0.237 m,Z方向提升了3.098 m;指数模型和等权模型结果相近。C6分段指数权函数模型的定位结果相较于等权模型的定位结果在X方向上提升8.002 m;在Z方向上提升了5.965 m。而C8的定位精度改善不论是分段指数权函数模型还是分段余弦函数模型都主要在X方向。

表1 不同方法定位结果对比Tab.1 Comparison of positioning results by different methods
为了更加详细地对比本文分段指数权函数模型、指数模型和分段余弦权函数模型,表2从协因数阵对角线之和、单位权中误差和点位误差3个方面进行对比。
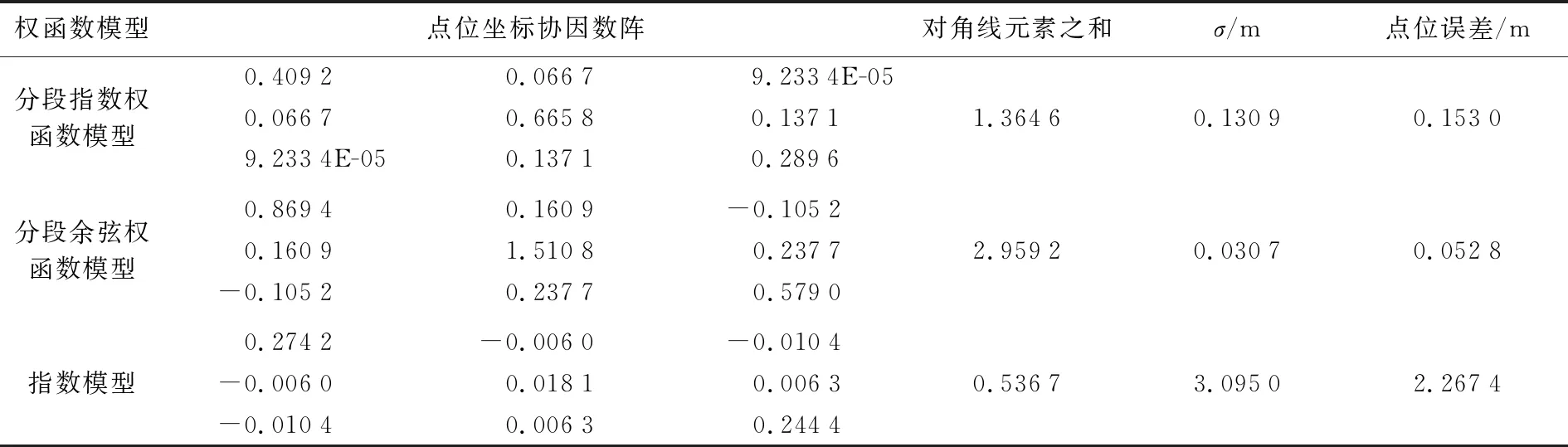
表2 3种模型对比Tab.2 Comparison of three models
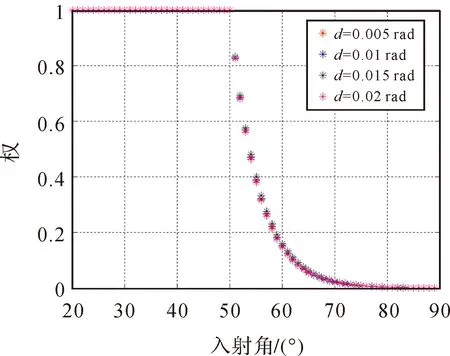
图6 加入不同误差时入射角与权值关系Fig.6 Relation ship of incident angle and weight
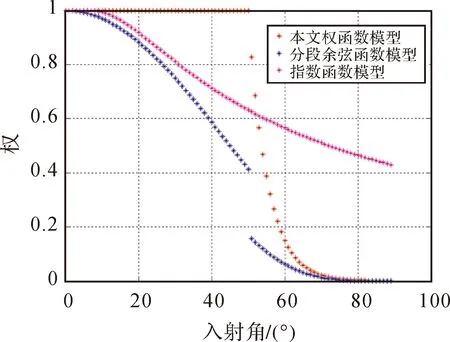
图7 不同权函数模型对比Fig.7 Comparison of different weight function models
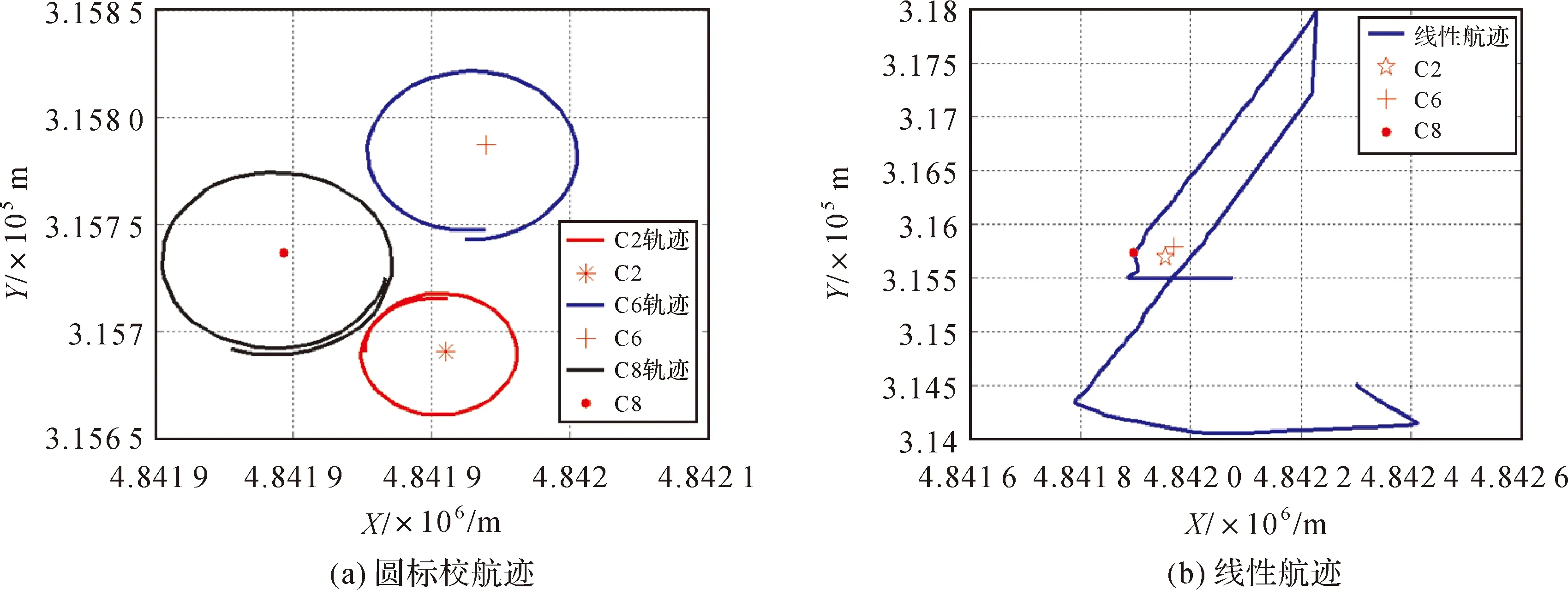
图8 C2、C6、C8测量船航行轨迹及应答器平面位置Fig.8 C2,C6,C8 tracking ship and transponder plane location

图9 C2、C6、C8控制点对应的入射角Fig.9 C2,C6,C8 incident angle corresponding to the control point
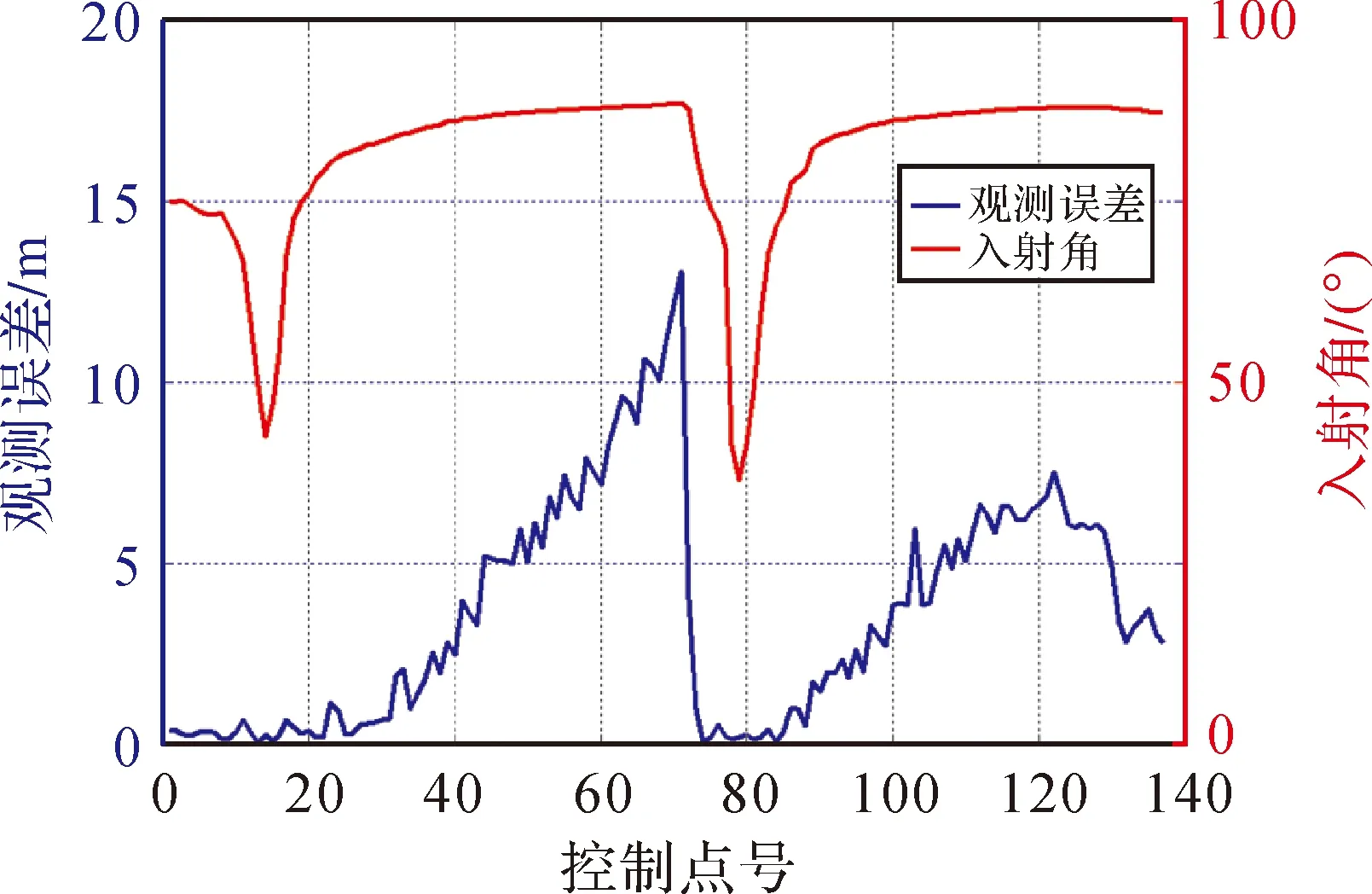
图10 入射角与观测误差(取绝对值)的关系 Fig.10 Relation ship between incident angle and observation error (take the absolute value)
结合图7和表2可以看出权值P越小单位权中误差越小,但是单位权中误差应表征实际的测量精度。本文提出的分段指数权函数模型更接近声呐距离测量标称精度,即约为0.15 m。此外,协因数阵的对角元素之和代表观测信息的利用率和观测几何精度。在单位权方差相同时,观测几何精度越小越好。指数模型的几何精度最高,本文提出的模型几何精度次之,但是指数函数模型权分配不合理,对大入射角的抑制作用不明显。
4 结 论
类似于GNSS定位观测,水下声呐定位观测中存在明显的高度角相关误差,且高度角越小误差越大。研究表明,入射角相关误差的产生主要来源于大入射角观测对相同声速场扰动、声速测量误差具有放大效应,入射角越大,这种放大效应越明显。在实测数据分析中,也发现了这种入射角相关误差,且其变化趋势与理论结果具有较好的一致性,均随入射角变大呈现指数增长趋势。基于上述原理,本文构建的水下声呐定位随机模型,可有效抑制大入射角观测条件下大误差的影响,从而提高定位的精度和可靠性。
声速变化及其观测的不确定以及入射角扰动大小很难精确给出。本文研究发现,由于观测权反映观测间的相对精度,上述各类不确定性的绝对量级对观测权值分配的影响很小,因此在实际应用中可灵活设置。试验表明,本文提出的分段指数权函数模型相对现有模型具有较为明显的优势,其观测不确定性意义明确,既可控制大入射角观测影响,也可保留足够的几何观测信息。
需要指出的是,本文将入射角相关误差归结到随机模型中,即设计了入射角相关的分段指数权函数模型。同时,该误差也可归入函数模型加以参数化估计,有望改善定位精度。实践中,也可直接采用高度角变量(即观测点与定位点之间连线与水平方向的夹角)构造权函数的方法改善定位精度。本文的分段指数权函数模型目前只采用浅水湖水深60 m实测数据进行试验验证,在深海定位方面还有待继续研究。