种植修复里的数字追问——从经验类比到数字引导
2021-08-14于海洋
于海洋
口腔疾病研究国家重点实验室国家口腔疾病临床医学研究中心四川大学华西口腔医院修复科,成都610041
种植修复是当前牙缺失的热门修复方式。为了获得“长期、稳定、有效”的种植修复效果,如何进行正确的种植位点设计和后续精准实施是临床上的首要问题。长期以来,种植手术大多由精度较低的自由手完成,位点的选择更多的是依靠术者长期累积的经验,这种经验类比逻辑引导下的种植位点选择,往往由于术者经验水平的高低和偶然误差而发生各种偏差,继而引发位点不正确相关的并发症[1-3]。随着数字化技术的发展,种植外科导板、实时手术导航等引导技术的运用,已经将口腔种植手术的精度提高到了1 mm[4-6],有效地减少了不少因位点偏差而产生并发症的风险。但即便是所谓的全程数字化种植流程中,依然无法不使用经验主导的实体技术来消除各数字化步骤之间的误差。因此,从严格意义上讲,目前的全程数字化种植修复暂时还不成立。另外,种植修复中已有不少数值要求,其无论与硬组织形貌真实数值相差多少,大多只是基于X线片的间接测量结果。而更真实的如颌骨的直接测量,从测量四要素——测量对象、测量方法、计量单位、测量准确度度等分析看,难以实施并获得全部要素,也无实时核查检验的共识方案,因此已有数值要求真伪难辨[7]。
16S rDNA序列测定:利用胶回收试剂盒进行PCR扩增产物的纯化;纯化产物的测序工作由上海生工生物有限公司完成。
为此,本文从正确种植位点的内涵和分析设计出发,分析梳理已有种植位点数值要求的测量学要素缺陷问题,推出全新的临床实测和核查方法以及依赖数字的临床方案;并进一步分析数字化种植各步骤精度和可能产生的误差,探讨以经验类比为逻辑基础的当前主流种植修复技术基础,无法有效支撑全程数字化种植修复的原委,并提出依赖数字的临床修复技术才是当今的瓶颈、未来研发的重点,为发展数字化种植修复提供了新的认知,旨在促进对数字化种植精密逻辑学科基础的思考与建构,推动引导式口腔种植修复学的不断发展。
但郭书凤没有“望天收”,更没有自暴自弃、只想着伸手向政府要救济,她想家里那几块被闲置的山坡地,是不是有文章可以做做呢?
1 正确种植位点的内涵与设计
1.1 正确种植位点的内涵
1995年Garber[8]提出了“修复导向下种植”的前牙区美学种植病例流程。基于数字微笑设计(digital smile design,DSD)模拟、目标修复体空间[9]及功能设计等修复理念,再结合患者颌骨的解剖生理和所用牙种植体的特点,医生将种植体植入缺牙间隙特定的位置,进而成功修复缺失牙,已经是当前种植修复设计和临床实施的标准流程。而这类依据上述流程所寻找和设计的种植位点,即为正确种植位点。
多步骤的种植与修复操作,步步都有误差,但未步步清零,累积后的误差体现在何处?全程数字化种植的数字逻辑关系是否存在悖论?毫米级的手术误差如何缔造微米级精准的咬合?没有人为徒手的误差补偿,全程数字化能顺利实现吗?
正确的种植位点是种植体植入的核心,可以使种植体周围的软、硬组织获得最佳的支持和稳定。种植体植入位置不良极易引起相关的并发症。在前牙区,受斜坡状牙槽嵴、拔牙窝形态以及较厚腭侧骨壁的影响,种植体植入往往偏向唇侧;在前磨牙区,受手指支点的影响,种植体颈部易向远中倾斜;而在磨牙区,由于开口度的限制,种植钻针很难直立,种植体颈部常向近中倾斜[10]。这些问题导致的种植体位置不良,往往会进一步引发种植体周围炎、基台折断、牙龈退缩等生物学、机械以及美学并发症[11-13](图1)。因此理解正确种植位点的概念内涵,掌握其分析设计方法,是种植修复取得良好临床效果的基础。
1.2 正确种植位点的设计
1.2.1 近远中方向正确种植位点设计 牙种植体在缺牙间隙近远中向的正确种植位点,主要通过控制种植体与邻牙或相邻植体之间的间距来实现。种植体正常的功能性负载之后,其颈部常常出现碟形骨吸收。碟形骨吸收以垂直向骨吸收为主,伴或不伴有水平向骨吸收。通常碟形骨吸收垂直向深度为1.5~2.0 mm,水平向宽度为1.0~1.5 mm[14]。因此,为避免碟形骨吸收波及邻牙或相邻种植体,进而导致种植体颈部暴露或产生进一步的种植体周病损,种植体边缘与邻牙牙根之间的正确间距应该≥1.5 mm,两颗种植体之间正确的近远中间距应该≥3.0 mm[14]。行修复导向下的种植体位点设计时,还需要考虑后续上部修复体的近远中空间需求,即临床牙冠宽度,近远中向缺隙两侧邻牙外形高点之间的水平间距,即目标修复体的最大冠宽度。这项数值要求通常与正常人牙齿形态相同,需要在术前位点设计或后续个性化基台设计时充分考虑。
1.2.2 颊舌方向正确种植位点设计 牙种植体在牙槽骨上颊舌方向的正确种植位点,主要由咬合以及种植位点骨量决定。当在前牙美学区植入时,一定注意控制植入轴向,推荐选择使种植体从原正常排列的天然牙舌隆突位置穿出的轴向位置。另外,种植体唇侧骨壁厚度应该≥2.0 mm,否则存在唇侧牙槽嵴吸收和牙龈退缩的风险[15]。在后牙区种植时,建议植入的种植体从中央沟位置穿出。同时,要注意保证种植体颊侧和舌(腭)侧骨壁的厚度至少为2 mm,才能确保后期软硬组织的稳定性[16]。若种植体颊舌方向上的骨壁厚度不足,则需使用骨增量手术来获得足够的轮廓外形。
2.2.2 数字化咬合获取的精度 以往的研究表明,天然牙、全口义齿和种植桥在咬合感知上具有差别,天然牙在20μm左右[49],种植桥在50μm左右[50],而全口义齿在100μm左右[50];另外,Babu等[51]指出15μm的厚度即可引起咬合干扰。
沧海桑田,万古如斯。汉水,不仅是一条绿色生态之河、商旅黄金之河、文化大河、历史大河和魅力大河,更是华夏文明的重要发源地和中华民族的母亲河。
正确种植位点设计包含了近远中向、颊舌向及种植深度方向的空间位置设计,是获得“长期、稳定、有效”的种植修复临床效果的空间位置保证,也是数字化种植方案设计的基础。医者唯有作出正确的设计,用正确的数值来设计规划方案,后续的数字化种植步骤才有可靠的依据,才有真实可靠的“数字化”。关于正确种植位点的位置设计的数值要求见表1~3。

表1 种植位点近远中向位置设计的数值要求Tab 1 Numerical requirements for the mesiodistal position of the implant

表2 种植位点颊舌向位置设计的数值要求Tab 2 Numerical requirements for the buccolingual position of the implant

表3 种植位点深度位置设计的数值要求Tab 3 Numerical requirements for the apicocoronal position of the implant
2 数字化种植修复里各步骤精度比较
数字化种植修复步骤越多、每一步的误差越大,累积误差就越大,到最后就越不容易通洽,最终失代偿的概率就越高。因此,减少步骤,并对误差进行“步步控制,步步补偿”,才能获得长期、稳定、有效的种植修复效果(图2)。而依赖数字的修复学科基础的形成,才是未来数字化种植修复成熟的基础。
2.1 数字化种植手术的精度
讨论 血淀粉酶增高原因有很多,常见于胰腺疾病、胆道疾病、消化性溃疡穿孔、阑尾炎、腹膜炎、肾功能不全和腮腺疾病[1]。少数肺癌及乳腺癌等也可见血淀粉酶增高[2]。文献曾报道过浆液性卵巢癌、卵巢黏液瘤、卵巢表皮乳头状癌、卵巢内膜样癌可致血淀粉酶升高[3-5]。但卵巢癌所致淀粉酶升高病例较为少见。血清中的淀粉酶主要来自胰腺和唾液腺,由胰型和唾液型两种同工酶组成。唾液型淀粉酶可以在肿瘤组织中表达,卵巢癌表达唾液型淀粉酶同工酶[6],因此血淀粉酶明显增高。
2.2.3 数字化颌位关系获取的精度 仅有咬合关系不能在架上再现口内的下颌运动,还需要结合颌位关系。颌位关系的制取有直接法和间接法两种,直接法仅通过数字化技术转移,不借助实体架。Solaberrieta等[54]的研究指出两种方法之间存在0.752 mm的平均偏差。Úry等[55]的研究指出间接法的平均正确度为0.55 mm±0.31 mm,最大差异为1.02 mm,相比之下,使用间接法获取数字化颌位关系更加准确。但需要注意的是,Maveli等[56]指出间接法中面弓不能准确转移上颌咬合平面在矢状面和冠状面的位置,因此临床医生应注意不同面弓系统的转移结果与口内的差异,并进行相应调整补偿。
模型扫描即口外扫描系统,工作原理为三角测量的结构光扫描技术。扫描时需要将模型固定在扫描台上,一次扫描获得的扫描面大于口内扫描,因而有更好的扫描拼接能力。相比于口内扫描,模型扫描常常具有更高的精度。根据各模型扫描仪的官网信息可知,InEOSX5扫描仪的理论扫描精度为2.1μm、3Shape E4和Ceramill MAP600为4μm,D2000、Planscan Lab以及AutoScan-DS-300均为5μm,E3为7μm。因此,模型扫描的理论精度在10μm以内。但文献研究得到的实际精度与理论精度还是存在或多或少的偏差,Emir等[24]研究了不同口外扫描系统对全牙列模型的扫描精度,得出InEOS X5实际精度为26.1μm,3Shape D2000实际精度为17.4μm;González de Villaumbrosia等[25]的研究指出,理论精度为10μm的ZENO Scan模型扫描仪实际精度为37.5μm。
对于口内扫描与模型扫描获取全牙列数据的精度差异,文献研究未能形成统一结论。Flügge等[26]的研究指出,模型扫描仪多次扫描结果之间的一致性高于口内扫描,表明模型扫描仪具有更高的精确度。Ender等[27]的研究也证实了这一观点,但需要注意的是,对于藻酸盐印模材料翻制的石膏模型组,多次扫描结果之间的一致性较差,原因在于多次藻酸盐印模和相应的模型之间存在较大偏差。Renne等[28]以工业级光学扫描仪获得的扫描结果为参照对象,指出模型扫描仪的正确度高于口内扫描仪,但精确度稍低于一些口内扫描仪。由于模型扫描前需要先制取印模并灌注石膏模型,这些过程中的不当操作可能导致最终的模型发生变形。这种情况下,即使模型扫描准确,最终获得的数据也不能真实地反映口内情况,并且二者之间的差异不能轻易地通过肉眼辨别。但有一点是清楚的:无论选择口内扫描还是模型扫描,都应该严格按照规范完成每一步操作。
2.1.2 数据处理的精度 将DICOM数据导入种植设计软件后,首先需要分割阈值重建颌骨。研究[19]表明,不同阈值下重建的颌骨也不相同。另外,操作人员的经验也会影响分割阈值的选择,从而影响颌骨的重建精度。Fourie等[29]的研究表明专业工程师能使用软件重建更高精度的颌骨,其与标准对照组的偏差仅为普通医师组的一半。
由于重建后的CBCT不包含软组织及目标修复体信息,还需要在种植设计软件中导入口内扫描或模型扫描数据,并与CBCT拟合。早期对CT与光学扫描模型拟合精度的研究集中在正颌领域,Nkenke等[30]的研究指出颌骨与模型之间的拟合偏差大于0.5 mm;Uechi等[31]采用放射阻射球作为颌骨和模型拟合的参考点,累积偏差不超过0.4 mm。种植领域的相关研究具体到不同的设备和设计软件。Ritter等[32]使用Galileos Implant软件对CBCT和口内扫描数据拟合后测量发现二者之间存在0.03~0.14 mm的平均偏差;Flügge等[33]在coDiagnostiX软件中拟合并测量得出CBCT与口内扫描数据之间的平均偏差为0.54 mm;Jamjoom等[34]在BlueSky Plan软件的拟合精度研究中指出,CBCT与口内扫描或模型扫描数据都可以达到较高的拟合精度(<0.05 mm),但“双扫描”数据之间拟合的偏差可达0.33 mm;Schnutenhaus等[35]的研究指出,CBCT与模型数据在种植规划软件中的平均拟合偏差为0.19 mm,当有金属修复体存在时,拟合偏差可增加至0.22 mm,此时采用放射导板可在一定程度上降低拟合偏差。以上研究中采用的拟合方法各有不同,需要注意的是采用选点拟合的方法时,应选择解剖特征点,并且位置应尽量分散。另外,拟合点对数也可能影响拟合结果。Jamjoom等[36]的体外研究指出拟合精度随着拟合点对数的增加而增加,但Choi等[37]的研究指出随着拟合点对数的增加,颌骨与模型之间的拟合偏差并没有降低,采用三点拟合即可满足临床需求。
2.1.3 导板加工的精度 数字化导板的加工方式有3D打印和数控切削两种,导板材料主要有树脂和金属两种,目前使用最多的是3D打印树脂导板。Kühl等[38]的研究指出3D打印树脂导板与设计数据在套环顶端的平均偏差为0.22 mm,在套环底部的平均偏差为0.24 mm,轴向的平均偏差为1.5°,可能是套环位于游离端且未设置支撑杆导致的打印过程中的变形;Kim等[39]采用了简化的种植导板为研究对象,指出种植导板的打印精度可达0.06 mm±0.05 mm,且采用不同的设备会影响打印精度;Chen等[40]的研究指出,树脂导板的打印精度和可重复性优于金属导板,但相比之下,金属导板具有更好的尺寸稳定性。
2.1.4 钻针动度 导板与钻针、金属套环等器械之间常存在一定间隙,以保证器械和冷却水的顺利进入,但间隙的存在又会降低导板对钻针的约束力,因此钻针在导板中也会存在一定动度。van Assche等[5]的研究指出钻针动度与预备深度和套环偏移成正比,与压板厚度成反比;Koop等[41]在此基础上增加了压板类型、压板内径和套环高度三个变量,指出钻针在内径较小的手持式压板中更稳定,且随着套环自身高度的增加,钻针更加稳定。Apostolakis等[6]构建的模型再次证明了这一观点。不使用金属套环时,钻针在导板中的动度更小,原因可能为个性化的设计减小了钻针与导板之间的间隙。Oh等[42]研究指出导管半封闭且为倾斜植入设计时,钻针的角度偏差可达11.2°。
2.2 数字化上部修复的精度
2.2.1 数字化模型获取的精度 对于单牙位而言,Serag等[43]研究指出,传统印模技术和数字化印模技术并无太大的差异,偏差为60~100μm,属于临床可接受范围。对于多牙位而言,Gedrimiene等[44]的研究指出口内扫描与传统印模无明显差别,但口内扫描更容易出现扫描杆匹配偏差的情况。另外需要注意的是,Kim等[45]的研究表明随着扫描距离的增加,扫描误差也随之增大,可能出现50~600μm的偏差。对于全颌种植而言,体外研究[46]证明口内扫描技术比传统印模技术更准确;但Kim等[47]的体外研究结论与此相反,指出口内扫描更容易出现角度偏差;Wulfman等[48]则通过系统性分析得出口内扫描的精度可以满足临床要求。
1.2.3 深度方向正确种植位点设计 正确选择种植体的植入深度同样十分重要,植入过深会引起软硬组织吸收,植入过浅则不能达到穿龈轮廓过渡所需的足够高度。当骨水平种植体颈部平台稍位于牙槽嵴顶下时,既可为上部修复体的理想穿龈轮廓提供充分的支撑空间,又可在轻度唇侧牙槽嵴吸收和植体周龈缘退缩时,防止种植体颈部金属外露。在无明显牙周组织丧失的理想状况下,建议将前牙区的种植体平台置于邻牙釉牙骨质界(cementoenamel junction,CEJ)根方3~4 mm,后牙区的种植体平台置于邻牙CEJ根方1.5~3 mm,这样可获得良好的美学和生物学效果[17]。此外,术者须具备完备的组织学和解剖学基础知识,在进行种植位点设计时,应充分考虑避让和保护重要的解剖结构如上颌窦和下齿槽神经管等,严控解剖类手术风险。
目前借助数字化技术直接获取咬合关系的精度尚不能达到上述要求。Solaberrieta等[52]分析测量了3种不同软件获得的数字化咬合关系的精度,指出误差为69μm±11μm;Wong等[53]研究指出不同口内扫描设备获取数字化咬合记录的精度有所差异,最小偏差接近30μm,最大偏差接近600μm,提示临床对于口内扫描设备的选择极其重要,也预示着最终修复体一次就想获得足够的咬合精度是困难的,徒手调不可避免。如何一次性获得高精度咬合是今后的研发重点和突破难点。
2.1.1 数据获取的精度 数字化种植常常需要在术前利用锥形束CT(cone beam computed tomography,CBCT)采集颌骨和余留牙等硬组织结构的空间位置信息,并导出医学数字化图像和交流(digital imaging and communications in medicine,DICOM)格式数据。现代CBCT设备精度所能达到的平均值大约为0.15 mm[18]。当使用CBCT的二维截面进行术前测量分析时,应在模拟植入位置与相邻解剖结构之间规划足够的安全距离;当采用CBCT重建后的三维颌骨数据来进行数字化种植导板设计时,还应考虑不同参数包括视野大小、拍摄层厚、体素值等对CBCT重建精度的影响。其中,体素值代表CBCT的空间分辨率,体素值越小,CBCT的空间分辨率越高,细节展现能力就越好。Ye等[19]研究了不同体素值及分割阈值对CBCT重建精度的影响,以光学扫描模型为参考对象,指出在相同的分割阈值条件下,体素值为0.2 mm时的颌骨重建精度高于体素值为0.4 mm时的颌骨重建精度。虽然国际口腔种植学会(International Team for Implantology,ITI)认为减少体素值并不会增加CBCT线性测量的准确性,但较小的体素值有利于获得更高的颌骨重建精度,从而有利于模型与颌骨数据之间的精准拟合。另外,在采集颌骨数据的过程中,运动伪影、高密度充填材料或金属修复体导致的放射伪影会对成像质量产生不利影响。因此,拍摄CBCT之前应对此类情况做初步判断并采取措施规避可能产生的误差。
CBCT重建后的颌骨还不能直接用于导板的设计,需要通过口内扫描或模型扫描来获取患者的牙列及软组织的表面结构信息,来补充导板设计时需要的所有结构位置信息。口内扫描采用非接触式光学技术,工作原理主要有三角测量、共聚焦显微、主动波阵面采样、光学相干层析成像等多种技术,现售的口内扫描设备常常采用多种技术的组合,以达到更好的扫描效果。文献研究[20-22]表明,不同设备的精度存在差异,甚至相同设备的精度在不同研究中也表现出较大的波动范围,3Shape Trios的扫描精度范围为19~78.4μm,iTero为23~57.4μm,3M True Definition为21.8~59.7μm,Planmeca Emerald为56.5~90.1μm,CEREC Omnicam为13.8~118.2μm,Carestream CS3600为26.7~154.2μm。另外,对于相同设备而言,扫描牙弓的范围也会影响其精度[23]。综合得出不同设备的报道结果,当前的口内扫描精度基本在100μm以内。
2.2.4 数字化咬合设计的精度 基于数字化颌位关系、静态和动态咬合关系设计修复体,需要借助修复软件中的虚拟架功能来实现。Hsu等[57]的研究指出虚拟禾架上的动态运动与实体架之间无明显差异,最大偏差不超过100μm。其他相关研究不多,但100μm相对实际咬合精度需求偏大。
2.2.5 数字化制作的精度 种植上部修复体的数字化制作方式包括数控切削和3D打印两种。对于数控切削而言,Bosch等[58]指出五轴切削得到的表面正确度可达到40μm左右,高于四轴切削;Kirsch等[59]的研究同样表明,五轴切削得到的修复体与设计数据的一致性更高,其在组织面和咬合面的偏差不超过30μm。除与设计文件之间的一致性外,切削修复体还应在基台上实现良好的就位。de França等[60]的研究指出,切削钴铬合金桥架具有更高的精度,垂直向的偏差仅有1.2μm±2.2μm,切削氧化锆桥架垂直向的偏差为5.9μm±3.6μm,均优于传统铸造桥架。而3D打印技术受限于材料,很少直接用于最终修复体的制作,常用于临时修复体和桥架及相关蜡型的制作。Lin等[61]的研究指出,3D打印树脂修复体与设计文件之间存在50μm左右的偏差,可满足临时修复的需求;Revilla-León等[62]的研究指出,利用选择性激光熔融(selective laser melting,SLM)和选择性电子束熔融(selective electron beam melting,SEBM)技术打印的全颌种植桥架与设计文件之间、与模型之间均存在60~70μm的偏差,但都在临床可接受范围内。
②非线性层:我们在输入层与LSTM隐藏层中间加入了非线性激活层,目的是引入更多的非线性特征,从而更好的反映数据的变化规律。该层的输出可表示为:
另外,修复体制作完成后往往需要验证,因此口内扫描数据需要通过3D打印或数控切削技术生成实体模型。Zhang等[63]的研究指出,3D打印模型精度可能与打印原理和打印层厚有关,通过调节打印层厚可以实现20~50μm级别的打印精度;另一项相关研究结果[64]与之相似,但从正确度和精确度评估后,认为3D打印模型尚不能完胜传统石膏模型!
综上所述,目前的数字化种植修复技术实施步骤繁多,即便是步步操作规范,每一步仍然存在误差,并且误差一定序列向后累积。那么问题就来了,步步累积的误差去哪了呢?
(3)风选后销售收入约为2.7亿元,而不风选的商品煤销售收入2.47亿,通过风选2017年销售收入提高2316万元。
3 种植修复里的数字追问
3.1 追问①
种植植入手术精度控制达到1 mm时意味植入手术成功,那1 mm的精度对种植上部修复意味着什么?种植手术毫米级的手术误差,对于种植植入与上部固定修复有着什么不同的意义?如何更好地序列整合展开?
3.2 追问②
种植位点是指缺牙间隙中容纳牙种植体的三维空间位置,而正确种植位点(correct implant site)是指符合修复导向下种植的各项要求,并能支撑长期保存种植体及上部修复体的临床可预期的种植位点。正确种植位点往往不是一个唯一的三维空间位置,而是一系列空间位置的集合。需要注意的是,正确的植入位点并非等同于天然牙原来牙槽窝的位置,而是在已有或通过增量技术获得的适宜软硬组织质和量的基础上,并遵循以修复为导向等种植修复法则来规划确认和控制实施的植入三维位置。
3.3 追问③
数字的转移和实施离不开测量。医生熟悉的CBCT测量不是对实体的实测,而是对图像的测量,所以也只是间接测量,是有误差的。由此可见,在利用数字进行设计之前必须要正确理解测量的内涵要求。广义上的测量是一种量化的过程,而狭义上的测量则是一种数值的比较。测量包含4个要素,包括测量的对象、测量的方法、计量单位和测量的准确度。测量的对象需要明确,即测量的起止点和被测参数的定义需要确定和研究;而测量的方法根据测量工具的不同是完全不同的逻辑次序,需要根据测量对象选择适合的测量方法;其次根据测量的参数,如长度宽度、轴向角度等,需要选择不同性质和分级的测量单位,种植修复中多运用毫米、度等为测量单位;同时准确度也是一个重要指标,与测量工具和方法直接相关,由于测量存在误差,与真值相比测量结果都是一个近似值,但这个近似值越准确越好,精度越佳越好。但是,当前种植临床实操中尚无统一专用的线段或角度测量工具,也无相应的测量方案(起止点、测量平面、准确度校验等),那这些已知的这些数值要求又是从哪来的?没有统一的实测方法和单位等,又如何在临床实操中核查这些数值要求?没有准确有效的数值核查、真值检验,已有的数值要求又有多少是真实可信的?
中共湘区委员会旧址暨毛泽东、杨开慧故居位于湖南省长沙市八一路538号。这里原称长沙市清水塘路22号,当时是长沙市的郊区,附近只有几间农舍、瓜棚等。
3.4 追问④
“修复导向下的种植”为种植修复理念,并非一个具体概念或技术,若没有可靠真实的数字临床技术支撑,在实施过程中又如何实现最终修复体设计的一对一完全转移和实现?“修复为导向下的种植”也仅仅引导了整个工作的前半部分——低精度工作部分,更高精度要求的、且患者一定会更关注的上部修复又如何引导?被轻视的后半截工作,是不是更说明了“修复为导向下的种植”并没有落实到“修复”上?是否修订为“修复导向下的修复”更全面、更能够真正的落地这个理念的真实内涵?
俄罗斯国家杜马信息政策、信息技术和通信委员会副主任亚历山大·尤先科在人工智能论坛上指出,如今全世界都在竞相发展人工智能,在这个领域俄罗斯不能落后,俄罗斯有IT行业优势,国家对人工智能立法责无旁贷,同时要立法部门和政府部门协同,学术界及社会广泛支持。
3.5 追问⑤
专著或教材中推荐的正确种植位点的相关数据样式有两种,一种是线段长度,对应的是线性误差;另一种是轴向角度,对应的是角度误差。但几乎全部文献竟然都有意无意地没有标注测量方法、量具、测量单位及精度要求等内容,数值要求对应的测量四要素不完整。没有统一的“度量衡”,又如何能够准确参考推荐值在术前设计所谓的正确位点、术中合理放置种植体、术后客观评价手术质量呢?
根据ak值大小,经“同异反”聚类后,已知中国男篮与世界水准的差距有5个类别,因“零差距”与“较小差距”对应的指标在同异反态势上与世界水准具有强同势或准同势,深入研究的意义不大。因此,本文只对 “一定差距”、“较大差距”和“相当差距”三个类别进行分析。
3.6 追问⑥
数字化种植修复能否成功建立在经验类比逻辑基础上?不在基础层面提出质疑并改变,构建依赖数字的临床技术端,全程数字化种植修复能是真的吗?
4 对种植修复里的数字追问的初步论证
4.1 追问①的初步论证
1 mm误差对于种植植入与上部固定修复的意义完全不同。1 mm的手术误差对于种植体的植入,意味着成功;而对于上部固定修复,意味着还没达标;在修复空间局促不足的情况下,甚至是失败。
种植体的植入并不是种植修复的最终目的。患者看得见的“阳光工程”上部修复体必须最终兑现患者的主诉诉求。“毫米级的手术误差意味着种植体植入的成功”只是对目前“修复引导种植”理念下所能达到的平均植入精度水平进行了一个共识性的阐述,骨界面依赖的骨结合成功与否还受诸多要素制约。但有一点是清楚的:植入的精度越高,获得正确种植位点的概率越高,支撑在最终修复时再现“术前修复设计”的可能性就越大。而对于上部固定修复而言,骨内的种植体主要承担支持和固位的功能,序列多步骤中精度要求最高的是最终修复体的咬合,最后戴入的最终修复体必须化解前面的累积误差,咬合面达到20~50μm的精度[49]。由此可见,最终修复体绝不允许出现毫米级别的偏差。
4.2 追问②的初步论证
目前的数字化种植修复技术包括数字化种植手术和数字化上部修复两方面,总体上看步骤众多,步步都有误差,其主要部分的精度研究进展概述如下。
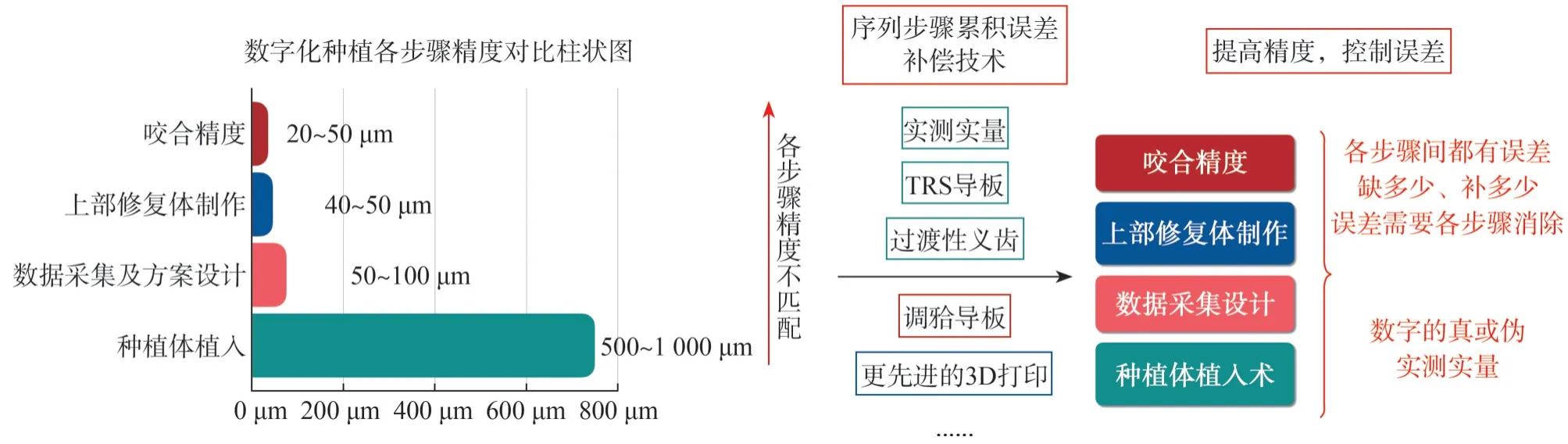
图2 数字化种植修复中各步骤间精度对比及误差分析逻辑图Fig 2 Logic diagram of accuracy comparison and error analysis among steps in digital implant restoration
多步骤的种植修复操作中的误差最后一定集中体现在了修复体的咬合上。种植区域之外的牙列咬合关系正常时,参考拟合点多,牙缺失种植修复体的咬合误差控制相对容易。但在全颌重建中,可参考对象变少,误差控制相对较难;有研究表明全颌重建的咬合误差可达100μm以上,因此,咬合误差包容性比固定修复体相对大一点,且咬合误差也不容易即刻表现出来。因此,一定需要通过多次调或多副序列性、过渡性临时义齿,才能够在垂直距离与水平位置控制、唇部组织支持和功能运动等方面达到相对理想的状态;也可以在种植手术中采用实测[65]、调导板等消减步骤或累积误差的技术进行人为纠错。
2.2 HCV 感染上调 Huh7 细胞内 AchE 活性 图2结果显示,AchE 活性随着 HCVcc 感染 Huh7 细胞的时间延长而增强,在 HCVcc 感染细胞 36 h 和60 h 时 AchE 活性与对照组相比差异均有统计学意义(P 均<0.01)。
为了做好全程数字化种植修复中的误差控制,首先需要从之前的经验操作和文献中解构每个细节,认识到可能存在误差的步骤;然后在实操中遵循规范,减小误差。从技术层面来看,全数字化流程是序列贯通的,但目前步骤误差必须通过医生或技师人为调整纠错,需要依靠操作者的经验。因此,全程数字化种植修复暂时不成立。
4.3 追问③的初步论证
种植体的植入过程受到许多因素的影响,为了能够精准转移术前设计,要使用引导技术,如种植导板、动态导航设备等。但不同的引导方法均存在误差,且误差大小有一定的离散度。因此在临床实施过程中,就需要对植入位点进行全程 实测及核查,以消减误差,获得正确种植位点。
有的是主人公为了让自己克服压力,更加充满信心地投入战斗;有的是打退或打死大鱼后的满意;有的是对美好时光、美好事物的期待和向往。
当前临床上使用较为广泛的种植测量工具为牙周探针,牙周探针作为测量牙周探诊深度的量具,并非专门的种植修复实测工具,也无法满足种植所需的各种小于1 mm的测量及测量精度要求,且临床上应用的牙周探针还存在容易变形、量程不足等问题,目测估计所获得的测量值准确度低。因此,根据测量的四要素要求,需要用专门实测缺牙间隙、修复空间内线段大小、轴向角度大小的测量和核查工具,配套的线性长度、角度的测量方法,才能获得准确有效的实测数值,数值标定位点或位置信息。当然也才能积累大数据信息后,辨识现有数值要求的真伪。本课题组研发了一套HX-9实测种植套装,并提供了完整的测量方案,很好地解决了种植修复临床实测核查难题。
4.4 追问④的初步论证
“修复导向下的种植”理念由Garber等[66]提出,至今已有25年余。为了真正实现目标修复体预告确认后设计的一对一精准转移,支撑的数字化修复技术应运而生。术前应用数字化虚拟种植修复技术进行目标修复体的预告和设计方案遴选,之后再依靠导板等手段进行设计的转移,数字化流程看似理想地实现了“修复导向下的种植”这一理念,但由于各序列步骤依次生成累积误差且缺乏针对性的实测核查和补偿,最后医生不得不采用各种实体技术依靠经验进行弥补;个别病例甚至要推倒重来;有些情况下操作者要根据术中及术后的情况,再次更改术前设计才能完成最终修复,而这样形成的最终修复体肯定与术前设计不一致,也无法实现术前预告确认后的原始设计方案效果,究其根源就是步骤误差没有步步补偿,累积误差越来越大。
在数字化种植修复中,目标修复设计的转移和核查必然需要依靠数字(数值要求)。数值在设计阶段容易获取并应用于设计标定,但在术中实操时由于没有适宜统一的“度量衡”,操作者往往无法在术区核查验证这些数值,从而导致了上述转移过程中无法消除的误差和偏移,无法有效支撑“修复导向下种植”理念的全程贯彻。因此,若没有真正的准确可核查检验的数字转移实施手段,那么“修复导向下种植”、亦或“目标修复导向下的修复”便也无法真正落地。
4.5 追问⑤的初步论证
教材中推荐的正确种植位点的相关数据,大多基于临床、动物与基础研究得出,但令人遗憾,常常没有标注这些数据的测量方法(测量起止点、测量平面等)、量具等测量四要素指标,已有数值要求真伪难辨;在当前临床实战中,术前设计和术中大都依靠CBCT图像的间接测量数据或医者的目测及经验,难以形成可靠的数值要求来源和实操核查方案,数据既无法实测,也无法核查,可信大数据尚无法形成,有价值的信息构建困难,暂时还无法形成数字化种植修复必须依靠的数字逻辑基础。
4.6 追问⑥的初步论证
随着数字化辅助设计和数字化辅助制造(computer aided design and computer aided manufacturing,CAD/CAM)技术的飞速发展,各种高新数字化技术进入了口腔种植修复领域。主流的种植修复数字工作流程,包括术前信息采集(口内扫描、面部扫描和CBCT扫描等)、目标修复体的设计、种植导板的设计制作或种植动态导航、数字化切削修复体等。临床医生及技师术前可以在CAD/CAM软件上设计目标修复体的形态及位置,再根据“修复导向下种植”理念设计植体位置,才能获得更为合理的种植手术方案。
在憧憬数字化的未来、享受数字化的便利之时,只有真正理解数据和信息的内涵,才能将发展前沿的数字化技术真正运用到口腔修复学科的发展和实践中去,推动学科发展。数据是指对客观事件进行记录并可以鉴别的符号或符号的组合,记载了客观事物的性质、状态以及相互关系。它是可识别的、抽象的符号。只有将大量的累积数据进行加工之后才能成为信息。可见,大数据的主要用途是要产生信息。这些信息中有许多冗余,所以信息又分为有效信息和无效信息。当有效信息积累到一定的程度后即可成为知识。知识又可以被借鉴和学习,从而指导我们的实践。而实践又是一个不断获取数据和信息的过程,从而形成一个闭环,不断推动一个学科的发展。
如今,许多修复学教材和文章里的不少数值要求没有测量方法及量具等测量四要素加持。没有统一度量衡,大数据累积困难,后期分析处理结果离散大,很难形成有用的知识。因此,要尽快搭上数字化时代的主旋律,就更要求要规范数据的内涵,积累海量的大数据,才能成功建构未来数字化修复、数字化美学修复的基础。
可见,从否定副词的种类来看,《齐》出现“不、无、靡、未、非、勿、莫”7种,没有“弗、否”,《周》出现“不、无、弗、否、未、非、勿、莫”8种,没有“靡”;从否定副词使用的数量来看,在《齐》中“不”和“勿”是主力军,其他否定副词较逊色,在《周》中“不”最突出;从否定副词修饰的成分来看,“非”位于句末,“非”与“不”连用,构成双重否定,仅在《齐》出现,“不”位于句末,构成反复问句,“未”接的代词作宾语前置,只在《周》出现,其他用法二书区别不大。相较而言,《周》否定副词的使用较《齐》丰富,南方略创新,北方较保守。
当前,从全球数字化修复的发展进程上看,临床端的发展远远落后于技师端。相对比较成熟的数字技术多在制作端,临床端的数字技术大多处于完善及成熟前的阶段,还无法从医疗质量、费用投入及时间花费上全面超越实体临床技术。根源在于当今修复学的学科基础是经验类比模型为主,还缺乏依赖数字的临床技术。没有数据,何来数字化?测量海量可靠的数据,为真正的数字化修复积累有效信息,从而形成准确可靠的修复知识,来不断推进数字化修复的发展,这是需要一直去不断努力完善和实现的目标。
通过引入辅助参数观测方程被转化为了关于θ1的线性方程.假设向量θ1中辅助参数与目标位置参数无关,则可以得到θ1的加权最小二乘解为
5 总结
当今数字化种植修复建立在“修复导向种植”的理念之上,通过数字化手段将术前设计精准转移到序列展开的临床实施中去,以获得可预期的长期稳定有效的修复效果。虽然已经见到不少数字化种植修复的病例,但限于现有技术,多步骤误差存在,实操中仍然要依靠医生的经验和实体技术来弥补误差,才能获得满意的最终修复效果。严格意义上看,全程数字化种植修复暂时不成立。
术前设计的可靠转移需要依赖精准的数字,临床上数字数据的获得和核查常常缺乏测量四要素标注。本文从种植修复的六大数字追问展开了对于种植修复学科基础的再讨论,提出构建一大批依赖数字的临床技术将是今后的突破点;而依据测量四要素指标内涵,判断种植修复的数值要求真伪,明确实测空间数量值的方法,减少步骤误差,提高数字关系转移质量,将是未来数字化修复学、引导式种植学、引导式口腔医学技术等的数字内核基础。
引导式修复学是实操时数字化修复的内涵,更完整的名称用数字引导式修复学可能更贴切,与种植修复学整合后又可叫数字引导式种植修复学,这些最新的口腔修复学的分支学科,其修复重建替代的目标是一致的,只是解决问题的手段和思考的角度不同、侧重不一而已。立足于累积可靠的大数据,获得有用的信息,通过精准的数字引导,才能实现可靠的种植修复临床效果。
致谢:感谢四川大学华西口腔医学院张煜强、解晨阳在本文资料整理与编辑校对过程中给予的帮助。
利益冲突声明:作者声明本文无利益冲突。