基于天文开源软件的卫星干涉测量数据处理系统∗
2021-08-14朱梦祎吴元伟弓剑军佳李西顺马浪明杨旭海
朱梦祎 吴元伟 姚 当 弓剑军 刘 佳李西顺 马浪明 韦 沛 雷 辉 杨旭海
(1 中国科学院国家授时中心西安 710600)
(2 中国科学院大学北京 100049)
(3 中国科学院精密导航定位与定时技术重点实验室西安 710600)
(4 中国科学院大学天文与空间科学学院北京 100049)
1 引言
甚长基线干涉测量(VLBI)诞生于上世纪60年代,是一种重要的高精度射电干涉测量技术[1].通过极长的基线长度达到极高的角分辨率,在天体测量、空间大地测量、深空探测、卫星定轨及导航等领域有着广泛的应用.传统雷达测距和多普勒测速对飞行器仅在视向方向有约束,VLBI可以实现高精度测角观测,提供飞行器的角位置信息,具有对飞行器的横向约束能力.美国国家航天局(National Aeronautics and Space Administration,NASA)最早将VLBI技术应用于深空探测,在20世纪70年代VLBI技术已被应用于阿波罗登月工程,同时开展了差分VLBI应用于深空探测器导航的验证研究[2].20世纪90年代,NASA致力于发展同波束VLBI技术,以更高的精度来测量两个飞行器之间的相对位置.干涉测量技术近些年开始被用于中高轨卫星如导航卫星的观测[3–5].由于VLBI技术对卫星信号的依赖较小,干涉测量技术在无源目标定轨领域也有重要应用价值.
我国的上海天文台佘山站和新疆天文台南山站的两个25 m射电望远镜分别于1987年和1993年开始进行VLBI观测.在中国探月系列工程的背景下,中国的VLBI网(Chinese VLBI Network,CVN)已经发展成为4个永久天线、一个移动台站和一个相关中心[6].2013年,中国科学院国家授时中心按照VLBI2010系统标准[7]设计了国内首套宽带VLBI系统[8],该系统主要用于世界时UT1的测定及导航卫星、地球同步卫星的轨道测定研究[9–10].
在人造地球卫星VLBI跟踪观测方面,上世纪80年代美国和日本进行过地球同步卫星的VLBI观测实验[11].2000年日本通信情报研究机构(National Institute of information and Communications Techonlogy,NICT)进行宽带VLBI软件处理机研究,并将其用于跟踪卫星观测[12].2004年中国科学院上海天文台舒逢春等[3]利用国内VLBI网跟踪大椭圆轨道卫星,采用基于条纹幅度的加权最小二乘条纹拟合方法,获得了卫星VLBI观测量及其精度估计,完成了卫星VLBI观测量的闭合误差检验,经系统差改正后,卫星VLBI观测量序列被用于“探测1号”卫星的轨道确定.2007年Lanyi等[13]通过无线电干涉法确定航天器的角位置,精确度可达到1–2 nrad.2013年Plank等[4]利用VLBI观测导航卫星的测试及研究表明,在单次观测时延精度为30 ps的前提下,通过每周观测一次导航卫星的方法,可实现毫米级的台站坐标确定.2017年Plank等[5]利用澳大利亚位于Hobart和Ceduna的望远镜,使用VLBI技术对GNSS (Global Navigation Satellite System)卫星进行了观测实验,充分利用测地VLBI已有的方法,开发了适用于卫星观测的观测流程以及数据分析方法,以便于支持更多的观测实验.2018年弓剑军等[14]基于中国科学院国家授时中心的VLBI系统,对中星12号GEO (Geosynchronous Earth Orbit)卫星成功开展了观测实验,使用DiFX (Distributed FX)和HOPS (Haystack Observatory Postprocessing System)软件进行数据相关及后处理,成功得到干涉条纹,时延测量精度约为10 ps.韦沛[15]于2020年进行了GEO卫星无源测定轨系统关键技术的研究,针对卫星干涉测量开发了采集系统和软件,通过试验表明能有效地采集卫星观测数据并用于干涉时间测量,单次测量精度约为1 ns.
VLBI数据的相关处理及时延观测量提取是通过相关机及后处理程序实现的.专业从事VLBI研究的机构(如SHAO(Shanghai Astronomical Observatory)、NASA、USNO(United States Naval Observatory)、JIVE(Joint Institute for VLBI in Europe)、VERA(VLBI Exploration of Radio Astrometry)、KVN (Korean VLBI Network)等)均有自主研发的硬相关及软相关处理软件[16].早期相关机为硬件相关机,硬相关系统由于硬件固化、稳定性低、扩展性差,无法满足多变的任务和应用场景,调试和升级困难.日本在20世纪80年代采用Fortran研制的XF型软件相关处理机已经应用于条纹检测.自2010年前后软件相关机得到飞速发展及应用,逐步替代硬件相关机.美国海军天文台、日本国立天文台、韩国天文研究院、中国科学院上海天文台等机构也都先后开发了各自的软相关处理软件,但大多为自用闭源软件.欧洲的VLBI联合研究所成功研制了SFXC (Super FX Correlator)软相关处理器并将其开源化.澳洲学者Adam Deller和WalterBrisen于2005年开发了开源软相关处理软件DiFX,其功能更全、适用性更强,美国VLBA (Very Long Baseline Array)使用的软相关处理机即为在DiFX基础上二次开发的.
本文介绍基于开源软件二次开发的一套卫星干涉测量数据处理系统,用于实现卫星干涉测量数据的相关及后处理.该系统基于开源的天文软件,有学术圈和软件社区的支持,易于扩展、可持续升级,且不受制于商业软件的知识产权限制.文中将对此工具的原理和性能作简要介绍.数据处理方法部分介绍了本文所采用的3种开源软件包,阐述了数据相关及校准的方法,给出了实测总时延的计算方法.结果及精度评估部分分别展示了实测数据的时延测量精度及定轨结果.最后对本论文所有的研究内容和成果进行总结,并根据系统目前存在的问题指出了后续工作的研究方向.
2 数据处理方法
2.1 开源软件包
2.1.1 DiFX
DiFX1DiFX参考网址:https://www.atnf.csiro.au/vlbi/dokuwiki/doku.php/difx/start是一种甚长基线干涉测量软件相关包,是目前软相关的标准,在天体测量与测地VLBI领域的干涉仪数据处理中广泛使用,如用于EHT (Event Horizon Telescope)、LBA (Long Baseline Array)、VLBA、IVS (International VLBI Service for Geodesy and Astrometry)等观测数据的相关处理.DiFX软件相关机的开发始于2005年,由学者Adam Deller与WalterBrisen开发,现由澳大利亚、美国及欧洲的DiFX Developer升级维护.此软件开源、可扩展性强、用户群大、维护升级有保证.自2007年起,每年都会召开User Development Meeting,持续对软件进行维护、升级和扩展,截止2020年11月,软件最新版本为2.6.1,文中所使用版本为2.5.2,目前版本暂不支持处理卫星数据[17].
2.1.2 AIPS
美国国立射电天文台(National Radio Astronomy Observatory,NRAO)开发的天文图像处理系统(Astronomical Image Processing System,AIPS2AIPS参考网址:http://www.aips.nrao.edu/index.shtml),是一个用于交互式校准和编辑射电干涉数据以及用于校准、构建、显示和分析天文图像的软件包,代码开源、说明文档完备,是甚长基线干涉测量领域(尤其是天体测量领域)使用最广泛的软件包之一.
该软件可在DEC Alpha (数字UNIX)、Sun (Solaris)和PC (Linux)等多种计算机体系架构上运行.受自由软件基金会的通用公共许可证(GNU General Public License,GPL)保护,可免费提供给学术界使用.同时NRAO提供了所有平台的源代码和二进制发行版[18].主要由NRAO的Eric W.Greisen进行维护.自2000年起,每年都会进行版本更新,每个版本随着debug增添补丁.随着版本更新,31DEC17及更早版本的发行版不再维护.目前最新版本为31DEC20,文中所使用版本为31DEC19.
2.1.3 ParselTongue
ParselTongue3ParselTongue参考网址:http://old.jive.nl/jivewiki/doku.php?id=parseltongue:parseltongue是经典AIPS、Obit以及其他可能基于任务的数据缩减包的Python接口,允许运行AIPS任务,并通过Python访问AIPS数据表头和扩展表;支持运行Obit任务和访问FITS文件中的数据;还实现对AIPS UV数据的处理,允许使用现代编程语言编写AIPS脚本,从而实现复杂的自动化数据处理任务.只要满足Python版本在2.2以上、工作环境为经典AIPS、使用有效的Obit版本这3个条件,ParselTongue可在任何现代Linux或UNIX上安装运行[19],本文自用版本为最新版本2.3.
2.2 数据相关与校准方法
数据处理主要包括相关和后处理两个环节,如图1所示.相关环节使用DiFX,标准DiFX仅能够处理射电源数据,需要输入测站数据、观测纲要(VEX格式)以及初始钟模型,而处理卫星观测数据,除测站数据、观测纲要及初始钟模型外,还需要准备卫星的初始几何时延模型.处理卫星数据时,v2d文件中积分时间和点数的设置均与处理射电源数据时不同,处理卫星数据时单通道频点数量更多.目前所设置的卫星数据积分时间为0.128 s、通道频点数量为1024,射电源数据积分时间为1.024 s、通道频点数量为64.对于实时任务,钟模型一般采用前日钟差数据外推的钟差钟速信息作为输入量.初始的卫星几何时延模型则由卫星初始轨道计算.相关后的数据被存储为FITS文件格式.后处理环节主要基于ParselTongue和AIPS软件包编写,可实现数据的检查和编辑,电离层、中性大气、钟模型、仪器时延的修正,条纹搜索、带宽综合以及总基线时延/时延率序列的计算.对时效性要求更高的实时任务,因当前系统无法获取实时的大气时延和钟模型,时延修正环节则仅使用预报的电离层模型修正电离层时延,不修正中性大气和钟模型引起的时延.
图2为经过时延校准和条纹搜索后的基线条纹信噪比(Signal-to-Noise Ratio,SNR)结果.图3展示了校准前后北斗C02卫星的互相关功率谱,左图为3条基线校准前卫星互相关功率谱,右图为3条基线校准后卫星互相关功率谱.如图所示,北斗C02卫星2218 MHz信号的观测,卫星信号有效带宽8 MHz,条纹搜索的时长为5 s,以JL站为参考站,JL-KS基线信噪比在100–600范围内变化,集中在300–400范围内;JL-SY基线信噪比在100–800范围内变化,集中在300–400范围内;3条基线校准前相位均在0◦–360◦变化,校准后相位均在0◦±5◦附近.
接下来的2.2.1–2.2.4节中,将介绍电离层时延、中性大气时延、钟模型和硬件时延校准有关的技术细节,与之对应更详尽的包含数据流、软件命令的流程图在附录A中给出.
2.2.1 中性大气时延
中性大气由对流层、对流层及平流层组成,其中对流层时延是中性大气时延的主要因素.对流层引起的时延可以分为两个主要部分:干大气时延和湿大气时延.干大气时延是由大气中气体的干燥部分引起的,而湿大气时延仅由大气中水蒸气的变化引起.干大气时延约占对流层总时延的90%,天顶方向的干大气时延通常约为2.3 m[20].湿大气时延是由于水蒸气的存在而引起的,在干旱地区为几厘米或更小,在潮湿地区则为35 cm左右.天顶方向的对流层时延使用Saasatamoinen模型计算,视向方向的对流层时延使用NMF映射函数模型计算,视向与天顶的对流层时延转换由如下公式计算,其中c为光速,ε为观测仰角,τt为视向对流层总时延,τdry、τwet分别为天顶干大气时延和湿大气时延,M为映射函数[21–22].
图4中左侧为卫星视线方向的对流层时延,红色为使用GPS数据和PPP (Precise Point Positioning)技术得到的结果,蓝色为使用气象站数据计算的结果.JL站GPS数据与气象站数据计算视线时延的差值峰峰值为0.07 ns,KS站GPS数据与气象数据的差值峰峰值为0.17 ns,SY站GPS数据与气象数据的差值最大可达0.7 ns.利用PPP技术计算的天顶大气时延的精度在1–2 cm,而使用气象数据计算的精度则在10 cm.观测站同时配备气象站和测地型GPS接收机,对于大气时延的校准优先使用PPP方法得到的大气时延,当GPS数据无法获取时采用气象站数据替代.
2.2.2 电离层时延
对于单频VLBI观测,电离层的校准通常通过使用全球单层电离层模型计算得到卫星视线方向的电离层时延[23].本文使用的试验数据来自北斗C02卫星的S频段,因该频段主要的时延误差来自电离层.为评估电离层修正的水平,本节中我们采用了4种不同类型单层电离层模型来计算视向方向电离层时延,对比不同电离层模型后处理结果的差异.采用欧洲轨道确定中心(Center for Orbit Determination in Europe,CODE4CODE电离层产品:https://www.aiub.unibe.ch/forschung/code--analysezentrum/global _ionosphere_maps_ produced-by code/index _ger.html)的3种单层电离层模型产品C1P (1日预报)、C2P (2日预报)、COD(事后精密)以及IGS (International GNSS Service)多分析中心加权平均的产品,选取2019年12月3日至5日C02卫星的观测,以IGS产品[24]为基准,将其余3种产品电离层时延计算结果与之比对.通常电离层时延计算使用如下公式[25],其中τi为视向电离层时延,τzenith为天顶电离层时延,VTEC (Vertical Total Electron Content)为垂直电离层电子浓度,v为观测频率.
由公式可知,电离层计算结果与特定频点频率相关,但在实际的数据校准中,并未计算特定频点电离层时延,而是计算不依赖频率的色散时延(Dispersive Delay)[26–27],其定义为波长为1 m的电磁波在电离层传播中的电离层时延,以秒为单位,disp-delay=40.28×1016STEC/c3,其中STEC (Sight Total Electron Content)为以TECU (Total Electron Content Unit)为单位的视线方向总的电子柱密度[25],通过修正色散时延,AIPS可实现对不同频点电离层时延的修正.
图5中从左至右分别为JL站、KS站、SY站,第1行为各站基于4种产品的电离层视向时延计算结果,第2行为CODE的3种产品与IGS的差值结果.红色、黄色、绿色、蓝色分别为IGS、C1P、C2P、COD产品计算结果.基于4种产品的电离层时延JL站变化范围为1.5–5 ns,KS站为2–4 ns,SY站为1–7.5 ns.C1P、C2P、COD 3种产品与IGS的差值结果从图中可直观看出,3站均为蓝色COD-IGS的差值结果波动最小,即COD与IGS的计算结果吻合度最高.
2019年12月3日3站差值的数值统计结果如图6所示,其中绿色为C1P-IGS、蓝色为C2P-IGS、红色为COD-IGS.JL、KS、SY 3站COD-IGS差值的标准偏差(Standard Deviation,STD)值分别为8.25×10−2ns、1.23×10−1ns、1.03×10−1ns,差异集中分布在±0.4 ns内.通过比较我们发现C1P、C2P的预报模型与事后的实测模型间差异大多在1 ns以内,KS站1日预报和2日预报电离层结果与事后电离层结果吻合度更好,JL和SY站C1P、C2P结果与事后结果的偏差稍大.对于S频段的实时任务,使用C1P、C2P电离层模型可实现0.5–1 ns精度水平的电离层修正.对于非实时任务,则可使用事后的全球电离层产品修正电离层时延.
2.2.3 钟模型修正
在钟模型的修正环节,我们比较了两种钟模型修正方法:一种是基于PPP钟差数据建立的钟模型,另一种是基于DBBC (Digital Base Band Converter)的钟差数据建立的钟模型.PPP钟模型使用测站GPS接收机的GPS数据和PPP方法得到的钟差序列建立,基于DBBC数据的钟模型通过将DBBC的钟差数据一阶线性拟合得到.相关环节使用的钟模型由前日的钟差数据拟合外推得到,基于两种数据得到的钟模型扣除相关环节使用的先验钟模型后得到钟差改正量.
选取2019年12月4日至5日的数据,使用上述方法进行比对分析,结果如图7所示,左侧黑色、蓝色、红色分别为初始相关钟模型、PPP钟模型、DBBC钟模型,右侧红色与蓝色为DBBC和PPP钟差数据相对先验钟模型的差值,黑线为对蓝色数据点的连续分段线性拟合,绿色为红色数据点的一阶线性拟合.由于FITS和DBBC的钟差在10−6量级,而PPP钟差数据在10−4量级,图中PPP数据JL、KS、SY各站分别补偿了−2.504×10−4s、−9.832×10−5s、1.204×10−4s.由图可知,基于两种数据计算的钟模型基本趋势一致,使用两个钟模型修正基线残余时延的结果比对见3.1节.
2.2.4 硬件设备时延
信号在接收机、数采设备、记录设备传输过程,不同台站使用不同的设备,带来不同硬件设备时延.该项时延的修正通过观测射电源的方式确定.观测期间每小时观测一次射电源.射电源数据的校准流程与卫星流程基本相同,依次对电离层时延、中性大气时延、钟模型进行校准,条纹搜索后,可分别得到卫星和射电源的基线残余时延.假设台站坐标准确、射电源坐标精确,因电离层时延、中性大气时延和钟模型已经修正,则射电源的基线残余时延即是接收机、采集、记录设备引起的硬件时延.将射电源残余时延从卫星的残余时延中扣除,即可得到校准了电离层时延、中性大气时延、钟和硬件设备时延的卫星基线残余几何时延.利用该序列与卫星初始几何时延模型,计算得到卫星基线总的几何时延/时延率序列,公式见2.3节.
2.3 总时延计算方法
DiFX的初始几何时延为测站相对地心的几何时延,而最终计算得到的几何时延为两个测站间的基线几何时延,由地心-测站几何时延到测站-测站几何时延转换的过程,公式如下:
其中,T为协调世界时(UTC)的时刻,为A-B基线几何时延,对于A-B基线,其中A站为参考站(以A站站钟为基线时延的时间戳).为A、B站地心时延之差;为某时刻经过地心的波前,该波前经过A站和B站的模型时延(包括几何时延、大气时延,但不包括时钟)(通常);分别为对时间的1阶、2阶导数;分别为对时间的1阶、2阶导数.公式(4)、(5)详细推导方式见附录B.
3 实测数据的结果展示及精度评估
3.1 基线残余时延及精度评估
图8为3基线校准后的残余时延.黑色为实时校准结果,蓝色为事后使用PPP数据校准钟差的后处理结果,红色为使用DBBC数据校准钟差的后处理结果,由图可看出3种处理结果的残余时延趋势一致,红色DBBC和实时结果有10–20 ns的明显偏差,该偏差部分源于实时校准模式未校准大气时延,部分来自事后校准的钟模型的修正.从图中可看出,JL-SY基线Real-time峰峰值约为20 ns、PPP峰峰值约为15 ns、DBBC峰峰值约为5 ns,KS-SY基线Real-time峰峰值约为15 ns、PPP峰峰值约为8 ns、DBBC峰峰值约为7 ns,使用DBBC数据进行修正的结果比使用PPP修正的结果要好.JL-SY基线和KS-SY基线对于未修正的实时结果,可以明显看到一个残余的钟速项,此项是因为实时任务中使用的钟模型不准引起的,通过DBBC修正后,该项的起伏明显降低有所改善.而PPP钟模型无法修正来自仪器和硬件的“钟飘”,由于DBBC钟模型同时还包含有部分信号链路(包括接收机、数采、记录设备)的硬件时延,因此整体上采用DBBC钟差数据拟合的钟模型比采用PPP钟差数据拟合的钟模型修正的基线残余时延要更平稳,起伏更小.
为定量评估最终得到的时延序列的测量精度,我们对图8所示的红色数据点,以DBBC钟差数据修正钟模型得到的卫星残余时延序列做了样条函数拟合.通过调整拟合参数,使拟合曲线反映残余时延序列的趋势项,残差项用于评估总时延序列中由测量噪声和校准误差共同贡献的“测量”热噪声水平.结果如图9所示,右侧为3基线残余时延扣除样条函数拟合趋势项后的拟合残差.该残差均在±1.5 ns内,标准偏差为0.4 ns.这里需要注意的是,该残差水平和样条函数拟合的参数是存在相关性的,理论上当样条曲线拟合的控制点足够多时,残差将会逼近0.因此在拟合过程中,需要合理选择和调整拟合参数,使得左图中的红色趋势项不出现过拟合.左图中红色趋势项,包含了卫星初始轨道偏差导致的真实几何时延偏差以及未完全修正的系统性偏差,如大气、电离层、仪器乃至测站坐标不准引起的系统性偏差.图9基本反映了当前我们得到的卫星干涉测量时延序列精度水平.
3.2 定轨结果
图10为时延数据定轨结果与iGMAS (International GNSS Monitoring and Assessment System)给出的事后精密轨道间的轨道偏差,横坐标为简化儒略日(Modified Julian Day,MJD).上、中、下3幅图分别为日期MJD=[58830.5,58832]、MJD=[58831.5,58833]、MJD=[58832.5,58833.5] 3个弧段.对应弧段径向(R)、轨道切向(T)、轨道法向(N)和3维位置(pos)的RMS分别为32.48 m、29.68 m、52.86 m和68.77 m.该结果引自韦沛博士论文[16]中北斗卫星的定轨结果.
4 总结与展望
本文简要回顾了卫星干涉测量及数据处理领域的现状,并基于已有的天文开源软件二次开发了一套卫星干涉测量数据处理系统.使用该系统对国家授时中心的北斗卫星干涉测量数据进行处理和定轨,测试表明,该系统对于人造地球卫星的干涉测量数据具有良好的处理效果,但在海量数据的自动批处理上仍有改进的空间,同时需要开展更多类型的观测试验,以精准定位各种系统性偏差的来源,并予以改进和改正.后续将进一步考虑优化算法和代码效率,提高校准精度.
附录
A 卫星干涉测量数据相关及后处理细节流程
如图A.1所示,卫星干涉测量数据相关及后处理流程,依次包含以下7个步骤:
(1)DiFX软相关处理机对于卫星数据的处理,需要预先准备卫星轨道文件、钟模型以及观测纲要文件.输出结果为标准的FITS格式干涉仪数据;
(2)FITS数据经由AIPS的FITLD命令读入程序,TASAV命令保存原始数据表格文件,POSSM命令用于生成原始数据的互相关功率谱(用于数据质量检查).同时将初始CL1表格输出;
(3)GPS数据经由Bernese软件的PPP模块计算生成各台站天顶大气时延序列.使用天顶大气时延序列和源的俯仰方位信息来计算视线方向的大气时延,并将视线方向大气时延写入CL2表的ATMOS列.同时利用全球电离层模型及卫星轨道,计算卫星视线方向的电离层时延,并将该时延序列写入CL2表的DDISP列.此处CL2表的生成使用自己编写的代码实现.通过TBIN命令载入CL2表,用于校准原始观测数据,其次通过TECOR命令校准射电源的电离层时延,也写入CL2表.至此电离层和中性大气时延校准完成,CL2表包含对卫星和射电源的中性大气时延及电离层时延的校准信息;
(4)使用正文2.2.3节中描述的方法计算钟模型改正文件,将该改正文件作为CLCOR命令的输入,实现对干涉数据的钟模型修正;
(5)对修正了介质传播时延和钟模型时延的数据做条纹搜索,搜索结果存入SN1表.使用SN1表升级CL3表得到CL4表,补偿残余时延后干涉数据的相位被拉平.使用POSSM命令生成校准后的卫星和射电源互相关功率谱(用于校准质量的评判);
(6)SN1表包含卫星和射电源的残余时延/时延率信息.im-file则是相关环节使用的卫星和射电源初始几何时延模型.因电离层时延、中性大气时延、钟模型已修正,射电源残余时延可以当作是未修正的系统性时延,主要成分为仪器硬件时延.将射电源的残余时延序列插值至卫星残余时延序列的时刻,得到的序列包含了卫星数据的硬件仪器时延以及未完全修正的其他系统性时延.将该修正项从卫星残余时延序列中扣除,得到卫星的纯几何残余时延;
(7)将卫星的纯几何残余时延与卫星初始几何时延模型相加,同时补偿时延率等修正项,计算得到卫星的基线几何时延/时延率序列(干涉测量的观测量),见附录B.
B 卫星基线纯几何时延计算方法
初始几何时延模型为台站相对于地心的纯几何时延,而定轨需要得到基于观测残余时延修正后的基线纯几何时延.本节介绍由初始的地心几何时延模型、残余时延/时延率序列,计算基线纯几何时延/时延率模型的方法.
B.1 定义
tgc:波前经过地心的时刻,假设该时刻为理想的UTC时;
tA:波前经过台站A时参考站A上的时钟时刻;
tB:波前经过台站B时参考站B上的时钟时刻;
cA(tgc):tgc时刻A站的时钟偏移量,使tA−cA为理想的UTC时;
cB(tgc):tgc时刻B站的时钟偏移量,使tB−cB为理想的UTC时;
(tgc):tgc时刻经过地心的波前,该波前经过站A时的模型时延(包括几何时延、大气时延,但不包括时钟),通常<0;
τ′B(tgc):tgc时刻经过地心的波前,该波前经过站B时的模型时延(包括几何时延、大气时延,但不包括时钟),通常<0;
τAB:台站A到台站B的时延(包括A、B的钟差),τAB≡tB−tA.
B.2 以地心为基准的先验时延
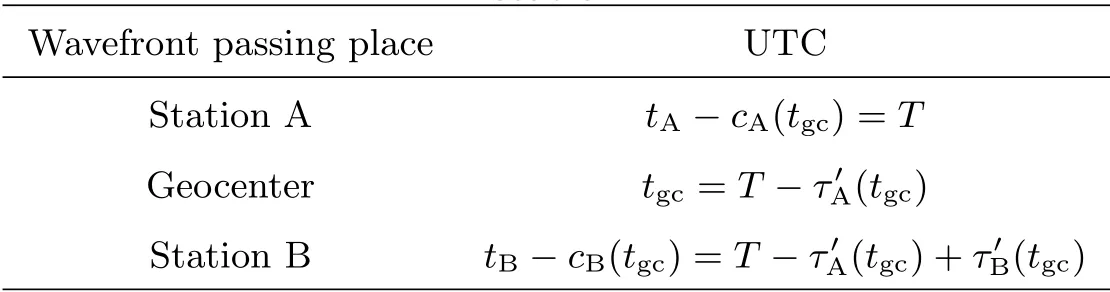
在UTC时的T时刻,通过地心的波前,该波前通过测站A、B的时刻如表B.1所示.

表B.1 以经过地心为基准的波前经过各点的UTC时间Table B.1 UTC time at each point of the wavefront passing through the center of the earth
因此,UTC时T时刻,经过地心的波前先后经过A、B两站,B站相对于A站的基线时延tB−tA可由下式表示.
B.3 以台站为基准的先验时延
在UTC时的T时刻,波前经过台站的模型中,波前通过台站和地心的时刻如表B.2所示:
表B.2 以经过台站为基准的波前经过各点的UTC时间Table B.2 UTC time at each point of the wavefront passing through the center of the station
定义∆t ≡tgc−T≡−.∆t以波前经过台站A为参考时刻,该波前再经过地心时,相对于经过台站A的时延;因参考点从地心变化至台站A,∆t近似但不完全等于−是T时刻经过地心的波前,该波前经过A站的时刻相对T的时延.由此,可得A-B基线的先验基线时延为:
其中所有变量在T时刻进行估计,对于地球上的固定天线,结果精度小于1 fs.注意∆t不取决于台站的时钟,它的值仅由传播时延及其时延率决定.
结果可达到亚飞秒精度.
B.4 以台站为基准的先验时延率
可以简单地在通过将(B2)式对时间求导,来推导以台站为参考和以地心为参考的先验时延率之间的关系.
该公式可达到1×10−22精度.
致谢感谢上海天文台舒逢春老师关于基线时延计算方法的讨论,感谢国家授时中心王源昕博士协助GPS数据的大气时延计算.本文的数据处理系统基于DiFX、AIPS、ParselTongue 3种开源天文软件包,GPS数据的处理使用了Bernese软件的PPP功能.文中使用了CODE和IGS的事后和预报的全球单层电离层网格数据,使用了iGMAS的精密卫星轨道产品,在此一并致谢.
