双离合自动变速器电控电动换挡执行机构仿真优化与试验对比
2021-08-13郭润泽孙晓东谭艳军林霄喆
郭润泽,孙晓东,于 闯,谭艳军,林霄喆
(1.宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;2.浙江吉利动力总成有限公司,浙江宁波 315800)
当前汽车产业电气化程度日益提高,无刷直流电机因小型、轻量、大扭矩的特点被电气化汽车产业所青睐[1]。随着双离合自动变速器(DCT)技术的逐渐成熟和驾驶性的提高,DCT 获得了市场及研究人员的青睐。今后几年汽车搭载的自动变速器中,DCT 将成为主力军[2]。
DCT 选换挡执行机构可分为电控电动式执行机构和液控执行机构,相比液控执行机构,电动换挡执行机构具有响应快、精度高、价格低廉等优点,其缺点是控制系统复杂[2]。电控电动换挡执行机构根据选、换挡控制电机的数目,可以分为单电机、双电机和多电机的传动方式。单电机执行机构中,只一个电机通过机械机构来实现选、换挡,该方案的优点是机构结构简单、易于布置。单电机只能顺序升降挡,在升挡时可满足基本的响应需求,但在降挡时不能快速换入所需挡位。
双电机执行机构中,各用一个电动机控制选、换挡,此种执行机构简单紧凑,便于布置,其缺点是电机的控制难度较大,尤其是选挡,换挡电机之间的协调控制难度[2]。电机与执行机构的结构设计与软件控制需要协调配合,从而实现车辆优秀的换挡品质与驾驶性。
本文以目前常用的两种电动机械式执行机构为研究对象,对两种执行机构的性能进行分析,同时对传动效率进行仿真优化设计。基于整车6 个驾驶性与换挡品质评价工况进行换挡系统层级数据采集试验与对比分析,展现两种执行机构的优劣势。
1 换挡执行机构分类
在自动变速器中,换挡执行机构根据动力源的类型分为电控气动、电控液动和电控电动3 种[3]。
1.1 电控气动执行机构
电控气动选换挡执行机构换挡速度较慢,且需要气动装置,因需要额外的气压系统,在大型乘用车或商用车上有较高的应用价值,一般很少应用于对换挡品质要求较高的轿车。
1.2 电控液动执行机构
电液执行机构目前应用较多,它具有传递平稳、速度位移控制简单、可实现与液力变矩器的良好配合,且具有一定吸收冲击及便于空间布置等优点。同时也有较严重的缺点。极限高低温度的变化使执行机构中液压油的黏度发生显著变化,回油管路压力将产生损失。例如,采用电液形式控制的离合器执行系统,在低温时,油黏度大,离合器的结合速度变慢,导致在汽车刚起步特别是坡道上响应慢,换挡品质变差。同时在温度降低到一定程度后,液压油的流动性能大大降低,严重时会发生换挡失效现象。其次,电液执行机构中液压元件对加工精度有非常高的要求,特别是高速电磁阀,工艺复杂,成本较高。
随着稀土钕铁硼永磁材料及电子电器料的发展,同时永磁电机结构简单,控制灵活。永磁无刷直流电机(BLDC)迅速发展[4]。同时面对汽车产业的电气化变革,国内外许多研究者和制造商将目光投向了电控电动形式执行机构,将自动变速控制系统中要直接控制的对象:油门、离合器及选换挡装置采取电动机为动力源的方式。在换挡机构方面,开发了基于永磁无刷直流电机的选换挡系统。能够利用蜗轮蜗杆、齿轮齿条或丝杠螺母等多种传动形式实现电动换挡,使得执行机构在性能上的不断完善,从而在变速器执行系统中采用无刷电机为动力源成为可能。
相对于电控液动执行机构,电控电动执行机构在以下几个方面具有显著优势:
1)电控电动执行机构减少了液压元件能量损失与动作误差,控制的精度进一步提高,反应动作更加准确。
2)取消液压系统相关零件,相对电驱零件,整体执行机构结构更加简单,空间更加紧凑。
3)电驱模块更加适应数字化与模块化发展方向,趋向于小型化、实用化、组合化、多功能化[7]。
2 电控电动式执行机构工作原理
以电机为动力源,结合齿轮齿条和蜗轮蜗杆的双离合变速器换挡执行机构,目前市面上主要分为搭载主动互锁式和凸轮转毂式两种,如图1 所示。

图1 电控电动换挡机构双离合变速器
2.1 主动互锁式选换挡执行机构
图2 所示为主动互锁式DCT 选换挡执行机构,它包括选换挡电机、选换挡组件和选挡轴。图3 所示为由换挡拨指挂挡,摘挡元件和拨叉构成的换挡指组件,作用于换挡导槽以驱动同步装置。

图2 主动互锁式DCT 换挡执行机构

图3 换挡拨指组件
主动互锁式DCT 选换挡执行机构的特殊性在于换挡拨叉的开口宽度大于换挡指的宽度。即使是在某一个挡位已经接合的情况下,也可以反向旋转换挡轴,并通过换挡指选择另一个换挡导槽,缩短预选挡的工作时间,提升工作效率,如图4 所示。

图4 主动互锁换挡导槽
当双离合变速器要预选一个新挡位,摘挡拨指会将非结合的离合器所挂入的挡位摘掉,此时换挡轴的旋转方向与换挡指移动方向无关,即无须选挡为需要摘挡的挡位即可完成摘挡。图5 所示为主动互锁摘挡。
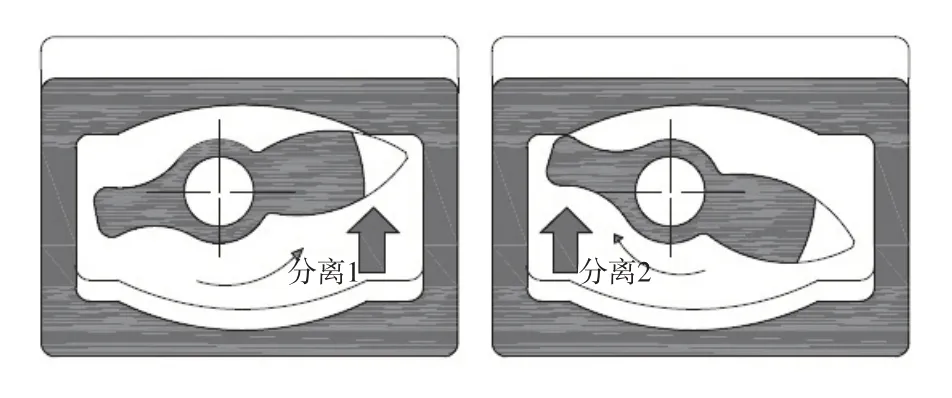
图5 主动互锁
图6 所示为双电机选换挡执行机构,选挡电动机负责将换挡指选定在需要换挡的变速器拨叉中,该电动机带有传感器,通过电机转角识别拨指所在拨叉位置;换挡电动机负责挂挡、摘挡和将换挡指退回中间的选挡位置,该电动机也带有传感器,通过电机转角判断该挡位同步器工作情况[2]。

图6 双电机选换挡执行机构
2.2 凸轮转毂式选换挡执行机构
双离合器凸轮转毂式选换挡执行机构的原理为奇数轴挡位与偶数轴挡位分别利用单电机完成选挡换挡。通过齿轮减速,驱动选换挡凸轮绕其轴线旋转,由凸轮推动伸入凸轮圆周表面凹槽内的菱形块,使拨叉沿着拨叉轴轴向移动到目标挡位。通过设定好的型线,完成摘挡,同步和挂挡的双离合所需预选挡动作。在选换挡凸轮的外圆周表面至少具有一条凹槽,凹槽上根据挡位相应设置有波峰和波谷,当所有菱形块位于波峰和波谷之间的中间位置时,变速器处于空挡;当某一菱形块位于任意波峰或波谷时,变速器处于与该波峰或波谷对应的挡位。转毂与变速器壳体有限位面,如图7 所示。不仅为自学习零点位置确认,同时,当凸轮在升降挡过程中,旋转至最低挡或最高挡后不能继续旋转,从而使变速器不会产生最低挡位直接升至最高挡,也不能从最高挡直接降至最低挡,机械上保证了安全性。

图7 凸轮转毂结构
以7DCT 凸轮转毂结构为例,将凸轮型线展开,如图8 所示,分别为奇数挡和偶数挡凸轮转毂。奇数挡为双型线,偶数挡为单型线。型线单双主要与拨叉挡位排布有关。奇数挡拨叉为1/7 挡和3/5 挡,分别通过各自的菱形块嵌入两条凹槽内。偶数挡拨叉为2/6 挡和4/R 挡,分别通过各自的菱形块嵌入同一条凹槽内。奇偶每两个拨叉的菱形块转角相距90°。
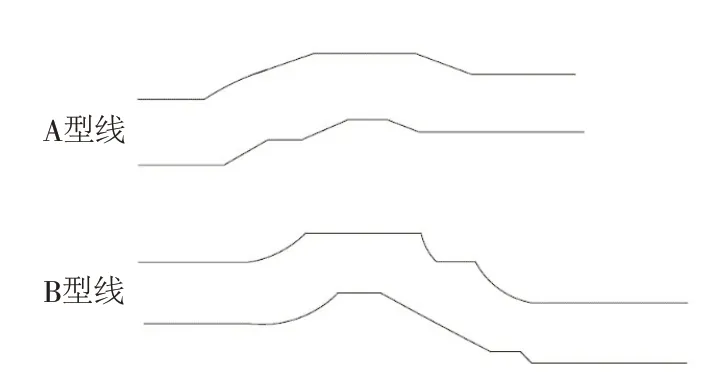
图8 7DCT 凸轮转毂型线
以7DCT 奇数凸轮转毂型线为例。A 型线布置1/7 挡拨叉,B 型线布置3/5/挡拨叉。两个拨叉相距90°转角。以1 挡升7 挡,奇数轴挡位变化为例,A 型线波峰为1挡,B型线为空挡。凸轮相对A型线波峰转动90°时,A 型线为空挡,B 型线为波峰3 挡。凸轮相对A 型线波峰转动180°时,A型线为空挡,B型线为波谷5挡。凸轮相对A 型线波峰转动270°时,A 型线为波谷7 挡,B 型线为空挡。此时,凸轮转毂与变速器有限位面,防止出现最高挡位直接降至最低挡位。
凸轮转毂型线可根据变速器的挡位配置灵活设计。当变速器为6DCT 时,奇数挡位凸轮转毂型线可设计为单型线,拨叉为1/5 挡与3 挡搭配。二者相距90°时,即可完成升降挡需求。
由凸轮转毂型线设计可知,凸轮转毂型线的波峰与波谷位于不同直线。在换挡过程中,不会出现同一根输入轴挂入两个挡位的情况,实现了变速器同轴互锁。
3 对比分析
基于空间布置、装配加工及可维修性、系统质量、电机性能、传动比、传动效率对两种电控电动机械式换挡执行机构进行理论对比分析。同时对二者传动效率进行数值仿真优化,基于最高执行机构效率在整车上进行CAN 线换挡系统相关数据采集,进行6 个行驶工况的换挡品质对比。
3.1 评判标准
为更清晰地对比两种电控机械式执行机构的设计与换挡品质表现。将设计指标与换挡品质评价总分设定为10 分。1~10 分对应的标准见表1。

表1 设计指标与换挡品质评价标准
3.2 空间布置
图9 为主动互锁式和凸轮转毂式执行机构与拨叉相配合的示意图。通过计算,两种执行机构布置空间包络体积见表2。

图9 主动互锁式和凸轮转毂式执行机构与拨叉配合
由表2 可知,主动互锁式执行机构所占空间更小,约为凸轮转毂式的一半。通过数据对比,主动互锁式执行机构可得9 分,凸轮转毂式可得7 分。

表2 执行机构布置空间包络体积
3.3 装配加工及可维修性
因主动互锁式布置紧凑,装配加工相关相对凸轮转毂式难度增加,可得6 分,凸轮转毂式为8 分。但因作为独立模块单独布置在变速器上,可维修性比凸轮转毂式高,可得9 分,凸轮转毂式为5 分。
3.4 系统质量
在执行机构总质量方面,将两种执行机构综合拨叉与驻车机构总成进行考虑。因为不同的执行机构方式决定了相关接口的设计,综合考虑两者皆为7 分。二者系统的质量见表3。

表3 执行机构质量
3.5 电机性能
直流电机具有优越的调速性能,在控制性能好、调速范围宽、启动转矩大、低速性能好、运行平稳、效率高等方便有优异表现[5-6]。同时,有刷直流电机结构简单、转矩大。但由于采用机械碳刷切换电枢间的电流,有寿命短、(金属片)易产生灰尘的缺点。在无刷直流电机上,有刷直流电机的碳刷(换向器)被替换成了晶体管及FET 等电子开关集成于控制器端,有利于长寿命化、无尘化[1]。
为了检测换挡执行机构及当前挡位状态,无刷直流电机采用霍尔元件检测电机转子转角位置[7]。霍尔元件会根据磁场的强弱产生霍尔电压。当电流流过磁场中的半导体时,会在与电流呈直角的方向上产生电压(霍尔电压)。这个现象叫作霍尔效应。图10 展示了用于无刷直流电机的霍尔元件的特性曲线。

图10 无刷直流电机的霍尔元件的特性曲线
两种执行机构所采用的电机(图11)都为霍尔传感器检测电机转子位置,但凸轮转毂式采用的电机为霍尔集成芯片,机械角度识别可达到一度一分辨,相比霍尔元件由极对数决定机械角度识别更为精确。执行机构电机性能见表4。

图11 两种执行机构的电机

表4 执行机构电机性能
同时,凸轮转毂式采用的电机拥有9 个针脚,相比主动互锁式多一个自带占空比反馈的功能,电机控制更为精确[8]。
综上所述,凸轮转毂式执行机构电机性能比主动互锁式电机性能更优,分别可达9 分与8 分。
3.6 执行机构传动比
主动互锁式执行机构从电机输出端,依靠齿轮齿条,螺杆等进行增扭减速。基于一定的行程及换挡速度,可通过电机输入转速与执行机构输出转速比得出执行机构传动比,即

式中:n4为换挡齿轮转速,r/min;v为齿条移动速度,mm/min;d为分度圆直径,mm。

式中:n3为螺杆转速,r/min;s为螺杆导程,mm。
换挡电机齿轮与执行机构内齿轮通过齿数比分别得出n2与n1,从而根据转速比得出传动比。
凸轮转毂式执行机构传动依靠齿轮传动。根据齿数可得两种电控电动执行机构传动比见表5。

表5 执行机构传动比
3.7 执行机构传动效率
3.7.1 主动互锁执行机构传动效率
主动互锁式执行机构传动效率计算主要考虑摩擦产生的效率损失。摩擦损失包含选挡导套,自润滑套和螺杆与支撑面。以电机为动力源最终由拨指作为执行机构的动力输出,作用在拨叉上,如图12所示。
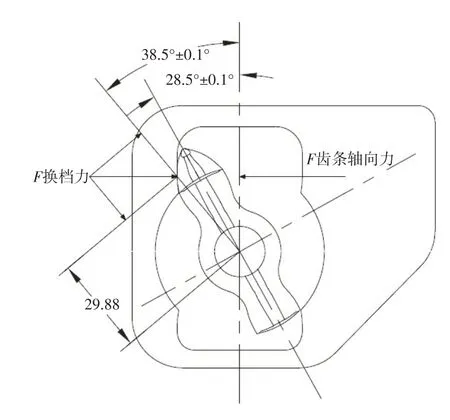
图12 主动互锁式执行机构驱动拨叉
通过力的分解可得
齿条的驱动转矩

式中:T1为选挡套的摩擦力矩,N·m;T2为换挡力矩,mm/min;T3为变速器换挡轴接口处摩擦力矩,mm。

式中:F为换挡力,N;l为换挡力臂,mm;θ为换挡转角。

式中:d1为选挡套支撑截面直径,mm;μ1为选挡套摩擦系数。
式中:d2为自润滑套截面直径,mm;μ2为自润滑套摩擦系数。
螺杆的驱动转矩

式中:T4为扇齿轮力矩,N·m;T5为螺杆前端力矩,N·m;T6为螺杆后端力矩,N·m。

式中:d3为螺纹中径,mm;d4为半圆齿轮直径,mm;ρ为当量摩擦角度;γ为螺旋导程角。

式中:α为螺纹牙型角,mm;μ3为螺杆摩擦系数。
因螺杆支撑面为滑动摩擦,则

式中:μ4为螺杆与衬套摩擦系数;d5为衬套支撑界面直径,mm。

式中:μ5为螺杆与壳体摩擦系数;d6为壳体支撑截面直径,mm。
换挡电机扭矩

式中:z2为换挡电机齿轮;z1为内齿轮齿数。
通过以上公式可得,当换挡力一定时,考虑摩擦损失后,通过换挡电机扭矩比可得该执行机构效率为71%,当齿轮传递效率取98%时,主动互锁执行机构传递效率为70%.
根据以上计算可得,该执行机构的传递效率受影响的因素为各传动摩擦系数、螺距、螺纹牙型角。根据MATLAB 控制变量进行数值仿真。
当螺距p1与螺纹牙型角α为变量时,执行机构效率如图13 所示。
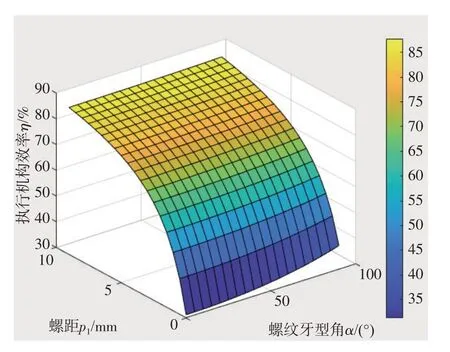
图13 螺距与螺纹牙型角为变量时,执行机构效率
当螺距p1与选挡套摩擦系数μ1为变量时,执行机构效率如图14 所示。
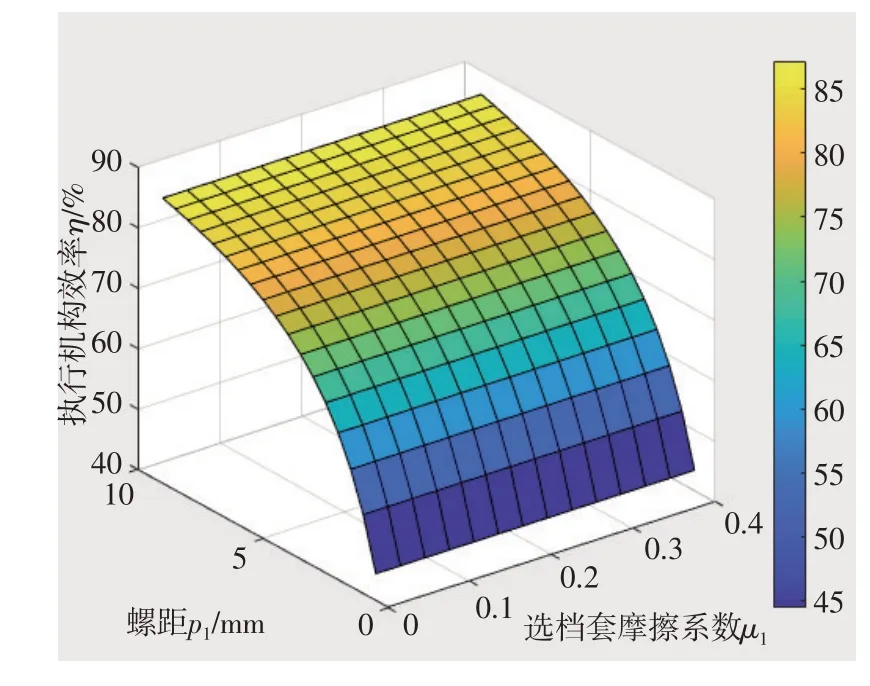
图14 螺距与选挡套摩擦系数为变量时,执行机构效率
当螺距p1与自润滑套摩擦系数μ2为变量时,执行机构效率如图15 所示。

图15 螺距与自润滑套摩擦系数为变量时,执行机构效率
当螺距p1与螺杆摩擦系数μ3为变量时,执行机构效率如图16 所示。

图16 螺距与螺杆摩擦系数为变量时,执行机构效率
当螺距p1与螺杆摩擦系数μ4为变量时,执行机构效率如图17 所示。

图17 螺距与螺杆与衬套摩擦系数为变量时,执行机构效率
当螺距p1与螺杆摩擦系数μ5为变量时,执行机构效率如图18 所示。

图18 螺距与螺杆与壳体摩擦系数为变量时,执行机构效率
3.7.2 凸轮转毂执行机构传动效率
凸轮转毂执行机构效率主要受圆柱凸轮压力角的选择决定。如图19 所示,转毂型线与拨叉菱形块进行受力分析。
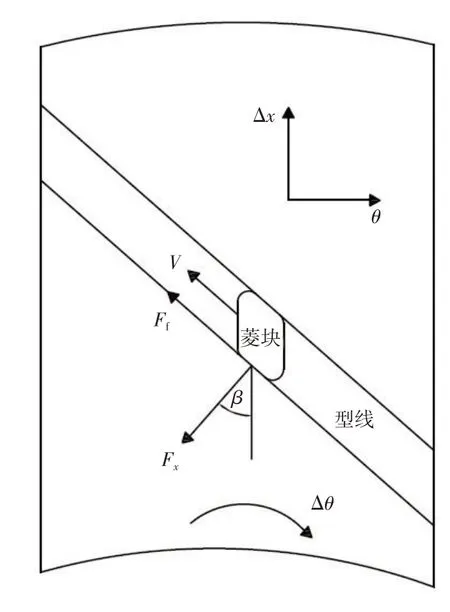
图19 型线与菱形块受力分析
圆柱凸轮机构是将加载在凸轮轴端的驱动力矩转化为凸轮型线凹槽对菱形块沿凸轮轴向的推力[9]。在凸轮轴端加载驱动力矩T(T=Mf)时,凸轮的输入功率为

式中,v为菱形块沿凸轮型线方向的运动速度。
凸轮的输出功率为

式中,F′x与Fx互为作用力与反作用力。
因此,凸轮的效率为

式中,μf为拨叉菱形块与凸轮型线摩擦系数。
当凸轮压力角与摩擦系数为变量时,执行机构效率如图20 所示。随着压力角度增大,凸轮传动效率呈现先增大后减小的趋势,且在40°左右可取得最大值[9]。当μf=0.1 时,凸轮机构的最大传递效率约为80%。因转毂凸轮执行机构在转毂后端仍有三级直齿轮传动,当齿轮传递效率取98%可得,该凸轮转毂式执行机构的最大传递效率为75%。

图20 压力角与摩擦系数为变量时,执行机构效率
3.7.3 执行机构最大传动效率
结合机械设计相关知识[10],许用压力角见表6。根据常用材料决定的摩擦系数,两种执行机构的最大传动效率见表7。

表6 凸轮许用压力角

表7 执行机构最大传动效率
根据二者的传动效率,主动互锁评价为7 分,凸轮转毂式评价为8 分。
3.8 换挡品质测试
根据以上数值仿真优化后的执行机构进行整车数据采集。采用同款车型,同一条封闭测试道路,基于581 设备,进行CAN 线通信的数据采集。测试车辆与道路如图21 所示。

图21 测试车辆与道路
测试工况基于整车驾驶性与换挡品质驾评的常用工况进行,分为静态换挡、R-D-R 蠕行、tip in tip out、动力升挡、动力降挡、制动降挡。
因同步器齿套位置为双离合变速器同步器控制策略中最重要的参考位置[11],换挡行程以此作为参考。
3.8.1 静态换挡
主动互锁式执行机构在PRND 的控制策略,除了P 挡的摘出与挂入,偶数轴可具备手动2 挡与R 挡切换,驾驶更加多样性。如图22 所示,凸轮转毂式执行机构,仅为P 挡的摘出与挂入的动作。驾驶性上,两者整个换挡产生的振动加速度不超过0.3 m/s2,无明显感受,表现优异。主动互锁式执行机构更好地将前进挡位完成预挂,以更快响应挡为需求,可得9 分,凸轮转毂式为8 分。

图22 静态换挡
3.8.2 R-D-R 蠕行
孺行工况主要考核的是离合器扭矩控制。如图23 所示,与静态换挡相似,主动互锁式执行机构的蠕行工况,1 挡为执行挡位,偶数轴立刻从R 挡切换为2 挡。而凸轮转毂式预挂1 挡和R 挡后,仅仅切换离合器完成蠕行。主动互锁式执行机构更好地将前进挡位完成预挂,可更快响应挡位需求,可得9 分,凸轮转毂式为8 分。
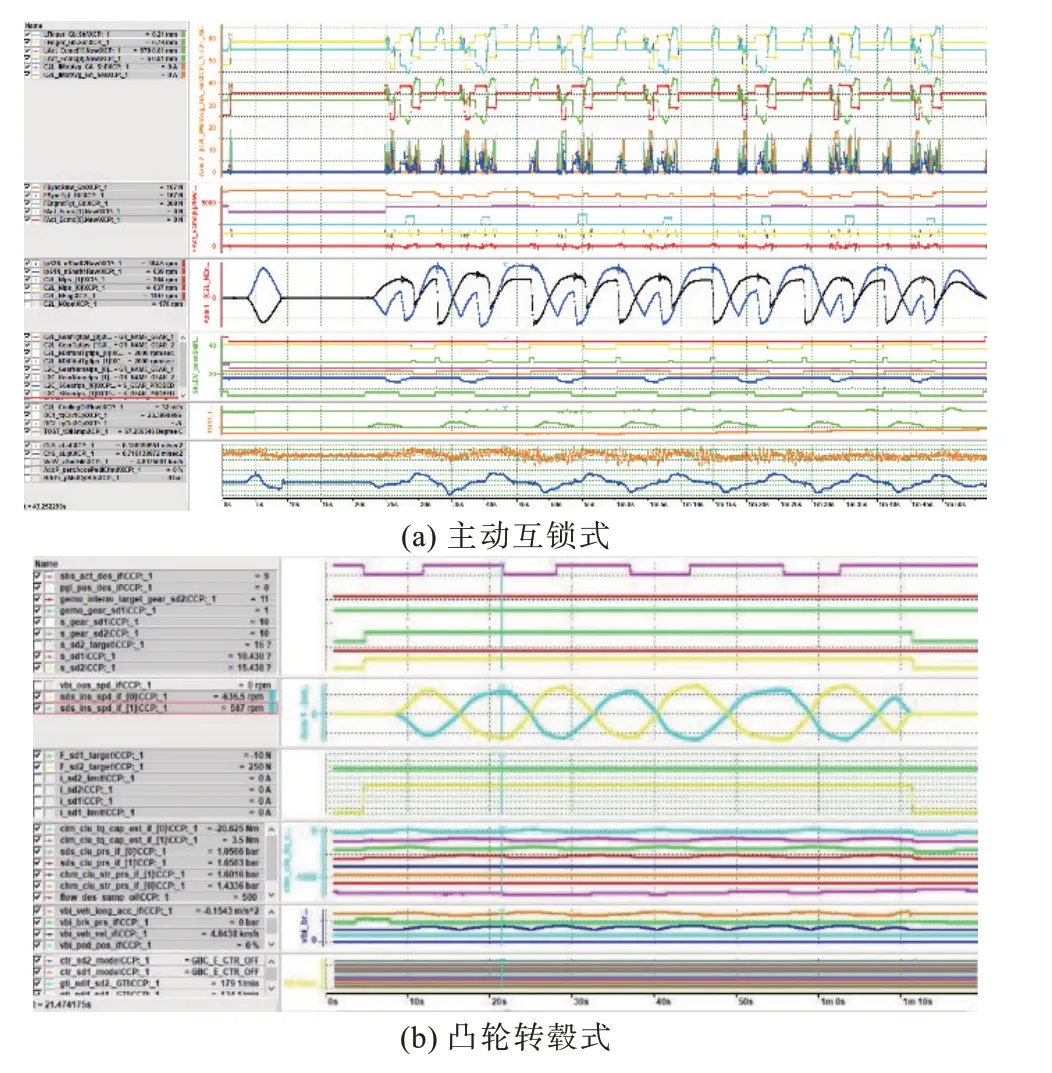
图23 R-D-R 蠕行
3.8.3 Tip in tip out
Tip in tip out 是变速器很苛刻的工况,因油门踏板与车速的连续变化,变速器连续产生正反拖。如图24 所示,仅正反拖工况,二者变速器表现优异。当变速器正反托工况与整车换挡点重合时,变速器及车辆会产生轻微jerk 与shock,但仍然可控制在2ms2以下。因此,在此工况下,二者评分皆为7 分。

图24 Tip in tip out
3.8.4 动力升挡
升挡工况下,全油门升挡对整个换挡系统最为苛刻,同步器需要优秀的同步能力,同时执行机构需要满足一定的换挡力。同时,执行机构的控制对同步器性能有直接影响。以全油门1 挡升3 挡为例,主动互锁式执行机构的换挡策略为2 挡为执行挡时,1 挡为预挂挡,输入1 轴转速跟随上升到6 523 r/min,输入1 轴退空,转速开始下降,输入二轴转速随车速继续上升。此时输入1 轴空挡等待1.08 s,输入1 轴转速下降到4 487 r/min 时空挡进行3 挡预挂。预挂3 挡时,输入2 轴转速4 600 r/min,车速62kmh 。预挂3 挡后输入1 轴转速3 289 r/min,输入1 轴转速差4 487-3 289=1 198 r/min。
同样工况下,凸轮转毂式执行机构的换挡策略相似。2 挡为执行挡时,1 挡为预挂挡,输入1 轴转速跟随上升到6 100 r/min,输入1 轴退空,转速开始下降,输入二轴转速随车速继续上升。此时输入1 轴空挡等待1.26 s,输入1 轴转速下降到4 000 r/min时空挡进行3 挡预挂。预挂3 挡时,输入2 轴转速4 284 r/min,车速62kmh。预挂3 挡后输入1 轴转速2 825 r/min,输入1 轴转速差4 000-2 825=1 175 r/min。
如图25 所示,通过数据对比可知,二者的换挡策略都对同步器进行了一定的保护,不在过大的转速下直接对同步器进行换挡,可在满足整车动力性能的同时,节省布置空间与成本。二者评分可得8 分。

图25 动力升挡
3.8.5 动力降挡
降挡工况下,动力降挡因需要克服变速器拖曳力矩并完成大转速差同步,对整个换挡系统的性能要求非常苛刻。以动力降挡4 降2 为例,主动互锁式执行机构的换挡策略为以4 挡为执行挡位,车速43kmh,输入2 轴转速1 572 r/min,100% 油门加速,4 挡预挂2 挡时,换挡后输入二轴转速3 505 r/min,输入2 轴转速差3 505-1 572=1 933 r/min。
同样工况下,凸轮转毂式执行机构的换挡策略相似。以4 挡为执行挡位,车速42 km/h,输入2 轴转速1 595 r/min,100%油门加速,4 挡预挂2 挡时,换挡后输入2 轴转速2 958 r/min,输入2 轴转速差2 958-1 595=1 363 r/min。
如图26 所示,通过数据对比可知,二者基于同步器换挡策略相同,600 r/min 的转速差对同步器换挡2 无明显差异。同时振动加速度无异常,二者评分可得8 分。

图26 动力降挡
3.8.6 制动降挡
制动降挡时,因非传动齿轮在整个运动过程中是常啮合的,且存在间隙,当输入轴转速波动较大时,常啮合齿轮位置可能产生敲击噪音。
以制动降挡3 降1 为例,主动互锁式执行机构的换挡策略为以3 挡为执行挡位,车速9 km/h,输入1轴退N 挡后对1挡进行预挂,输入轴转速差为548 r/min。
同样工况下,凸轮转毂式执行机构的换挡策略相似。以3 挡为执行挡位,车速10.9kmh,输入1 轴退N 挡后对1 挡进行预挂,输入轴转速差为636 r/min。
如图27 所示,通过数据对比可知,二者基于同步器换挡策略相同。同时车辆振动加速度无异常,维持在2ms2上下。二者评分可得8 分。
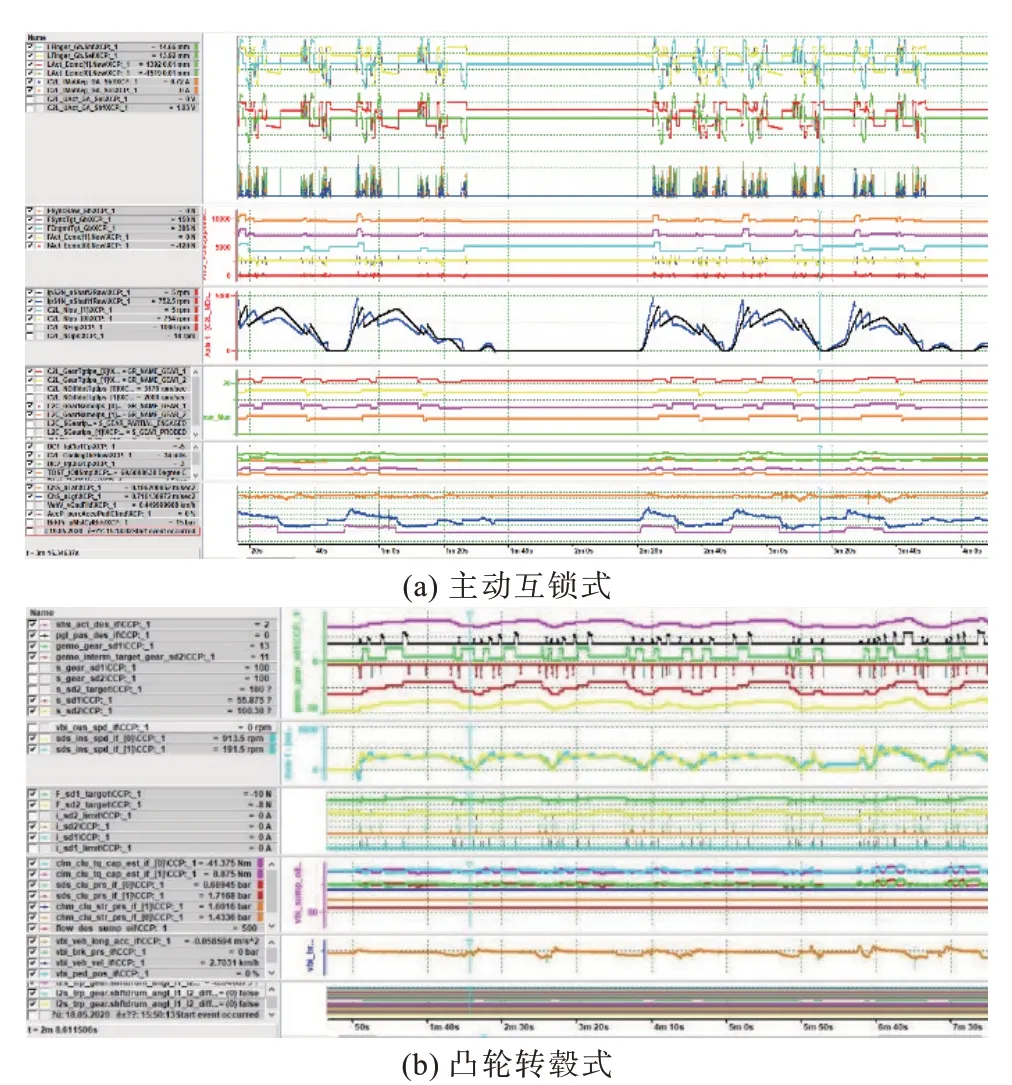
图27 制动降挡
3.9 对比结果
通过雷达图的方式,分别对传动机构设计及整车换挡品质进行分数对比,如图28、图29 所示。

图28 机构设计对比

图29 换挡品质对比
4 结论
1)两种电控电动执行机构相比,主动互锁式集成程度高,所需布置空间约为凸轮转毂的一半。
2)凸轮转毂式执行机构需要大的布置空间。因此无法全部布置在变速器外围,可维修性不高。
3)主动互锁式执行机构因采用螺杆齿条实现传动系统的高度集成化,但传动效率相比凸轮转毂式低5%。
4)根据变速器同步器及整车的使用环境,无刷直流电机与齿轮传动匹配的执行机构传动比至少需要为50,电机的堵转扭矩至少为1.3 N·m.
5)换挡品质主要由变速器及整车软件控制策略决定,换挡点、换挡力与电机的占空比产生直接关系,从而将直接影响整车的驾驶性。整车可根据车辆驾驶模式与产品定位灵活控制与标定执行机构的换挡能力。当整车振动加速度小于2ms2时,车辆可表现出较优秀的换挡品质。
本文对变速器电控电动换挡执行机构设计及换挡品质提升具有参考价值。
