点融合技术在机场终端区的应用研究
2021-08-13何秋钊曹银杰
何秋钊,曹银杰,侯 冲
(1.中国民用航空飞行学院科研处,四川广汉 618307;2.中国民用航空飞行学院 机场工程与运输管理学院,四川 广汉 618307)
近些年,由于大型运输机场终端区的保障服务能力不能适应民航业的急剧增加,导致航班延误的概率大大增加。终端区作为进离场航空器的过渡区域,其运行效率与航班的准点率密切相关。传统的仪表飞行程序已不能满足大流量情况下的航空器运行,管制员通常采用开环引导的方式来建立飞行间隔,频繁的陆空通话使管制的工作负荷也随之增加。现行使用的进近程序对于空域资源的使用效率也不高,不能自适应维持航空器之间的间隔[1]。
为了克服雷达引导的缺陷、提升基于性能导航的优势、提高终端区空域的运行效率,2006 年欧洲空中导航安全组织提出了点融合系统(point merge system,PMS)的运行理念[2]。区别于原有方式,点融合技术是基于性能导航技术在进场程序和排序空域方面的集成应用,由雷达的开环引导航向,变为闭环直飞融合点指令,以实现对多方向进场交通流排序和间隔管理。
目前,在点融合技术的应用方面,挪威Oslo 机场、爱尔兰Dublin 机场、伦敦希斯罗等国外机场终端区已投入使用;国内对于该程序的使用处于初步阶段,上海浦东机场、广州白云机场、深圳宝安机场仅仅采用了点融合程序的试运行。
国内外对于点融合的理论研究集中于设计和评估运行方面。欧洲航行安全局首次提出点融合系统,并且对都柏林机场终端空域设计的点融合程序,撰写了空域点融合系统实时仿真研究[2-3];2010 年欧洲航行安全局提出了区域导航与连续下降的点融合技术和基于PMS 的扩展终端空域运行,并在雷达模拟机上验证了其可行性[3]。国内对于点融合的研究主要是对点融合的概念和背景介绍。游录宝等对点融合的基本概念和点融合的应用进行了研究[4];晁绵博等设计了长沙黄花机场的点融合进近程序,对系统内的下降梯度和静态容量进行了评估,但是对于该静态容量的结果有待商榷,即所计算的应用PMS 系统之后的终端区容量过大[5];陈相安设计了不同交通流负荷下的宁波栎社机场点融合进近程序,主要对点融合系统内的弧上排序进行研究,利用图论的方法对点融合系统的网络最大流进行分析[6];李震对重庆江北机场点融合程序可行性进行了研究[7];马林南等游录宝等以上海浦东机场的点融合程序为例子讨论了内外排序弧的高度、融合点速度和内外排序支路速度对点融合系统运行及环境效益的影响,并且以四维航迹预测模型进行计算机仿真,对点融合系统运行效能进行了评估研究[8-9]。
本文对点融合系统的概念做了简单阐述,主要对系统的分类和终端区的运行模式进行分析讨论,对已投入使用点融合系统的机场的关键参数进行对比,最后结合国内机场终端区的应用实例,探讨传统运行模式和PMS 运行模式下的运行效率。
1 PMS 分类及其终端区运行模式
PMS 由一个融合点和与该点等距的两条或多条排序边组成,呈现一个收敛的几何形状,主要由排序弧和融合点组成[10-11]。如图1 所示,排序弧包括内弧和外弧,可以由一条弧或多条弧组成,允许路径延伸或缩短。

图1 点融合系统构型-水平轨迹示意图
如图2 所示,对于点融合系统,也可以通过角度进行定义。分别为点融合进入航迹变化角α、点融合直飞航迹变化角β、点融合退出航迹变化角γ和点融合区域包围角δ。

图2 点融合系统结构-角度示意图
1.1 系统分类
根据需要融合、优化的进场交通流数量、方位及流量情况,点融合系统在设计的过程中可以划分为单点融合系统和多点融合系统。
其中对于单点融合系统的设计应该考虑以下因素:
1)点融合系统排序边到融合点的高度限制符合当地主流运行机型的下降梯度要求。
2)点融合系统排序边上任意点到融合点的距离视为相等,内排序边到融合点的距离在进近(终端)管制区内,一般设计为40 km,使具有足够间隔便于调配。
3)点融合系统排序边长度,在进近(终端)管制区内,一般设计为40~50 km,使具有足够的吸收延误能力。
4)点融合系统设计两条平行但不等高的排序边,垂直间隔应当至少保持300 m,且内排序边高度高;水平间隔建议设计为10 km(5 n mile),经安全评估后可以适当缩减,但不应低于4 km(2 n mile)。
5)排序边应设计固定速度(航空器在排序边上运行的速度),具体数值应当根据点融合系统距离五边的位置远近确定。
6)在公布排序边所对应的进场程序时,标称航迹应当公布为所有航路点按程序走向逐一连接直至融合点所形成的连线。
7)单点融合系统使用空域应当位于同一管制扇区内。
多点融合系统设计包括串联与并联两种设计,其中串联设计目前在国际上尚未应用。多点融合系统并联设计是多个点融合系统的一种连接方式,其特点是将两个(含)以上的单个点融合系统并行运行,最终汇聚到同一个航路共用点,可以有效处理多个方向进场交通流的情形,如图3 所示。
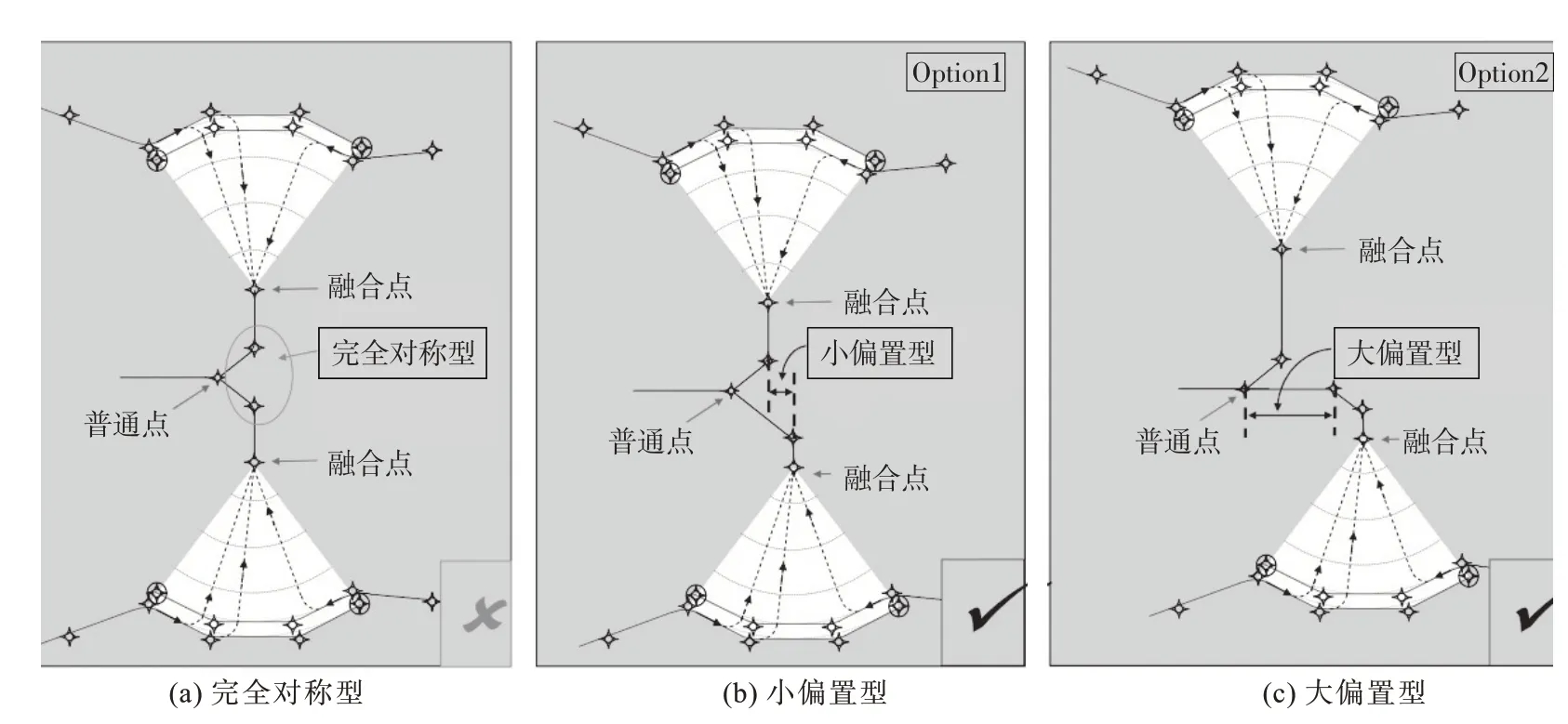
图3 并联点融合系统示意图
并联设计包含3 种典型方案:完全对称型(full symmetry)、小偏置型(offset)和大偏置型(large offset)。从减小融合点附近冲突范围的角度考虑,偏置型较完全对称型更为安全。需要注意的是,为了使管制员更直观地判断两个点融合系统上航空器的间隔且不造成空域使用浪费,应当将两个融合点到后续航路共用点的距离设置为相等。
由于到达流的整合具有渐进性,可以设想设计连续点合并系统,对应的是一种“串联”配置。利用串联设计将E-TMA/TMA 或进近管制空域分开,如图4 所示。但请注意,这种配置尚未经过测试。
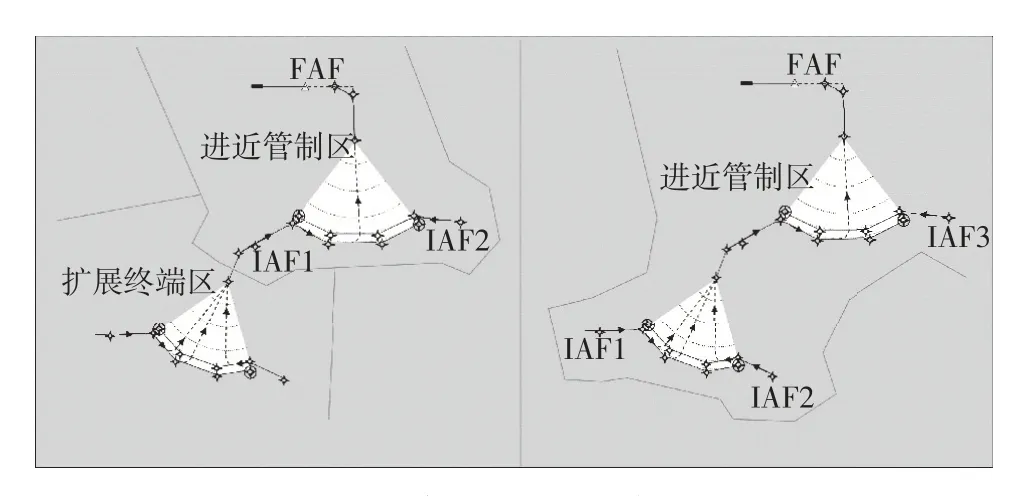
图4 串联点融合系统示意图
1.2 终端区运行模式
根据终端区的运行环境和管制模式,点融合系统在终端区的应用中主要分为常规运行模式和非常规运行模式。
如图5 所示,在常规的运行模式下,点融合系统的运行模式主要分为两个主要阶段:
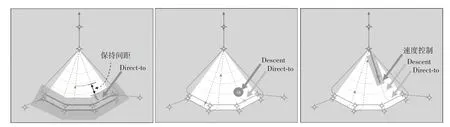
图5 点融合系统的常规运行模式
1)在没有管制干预的情况下进行路径延伸,让航空器沿着排序弧飞行。当与前一航空器之间达到适当的间距时,向航空器驾驶员发出“Direct-To”融合点指令。
2)当航空器离开排序弧之后,通过速度控制来维持航空器之间的间隔。
一般情况下,航空器在点融合系统内的运行按照常规运行模式。当运行过程中出现特殊情况时,非常规运行模式在终端区的应用中起到了重要作用,点融合系统通过备用程序解决在运行过程中的特情。其中,对于特情的处置,主要分为未发布直飞指令和复飞的情况。
1)未发布直飞指令。当航空器经过飞越航路点仍未收到“直飞(Direct-to)”指令,即排序弧溢出。处理排序弧溢出的方法有两种,如图6 所示,第一种方法为航空器自动转弯飞向融合点,这种设计使航空器驾驶员更加明确转弯时机,同时保证航空器飞完排序弧的最后一个点;第二种方法为航空器将基于旁切点转弯,此种设计更好地控制航空器的飞行轨迹,防止航空器飞到旁切点外的区域。
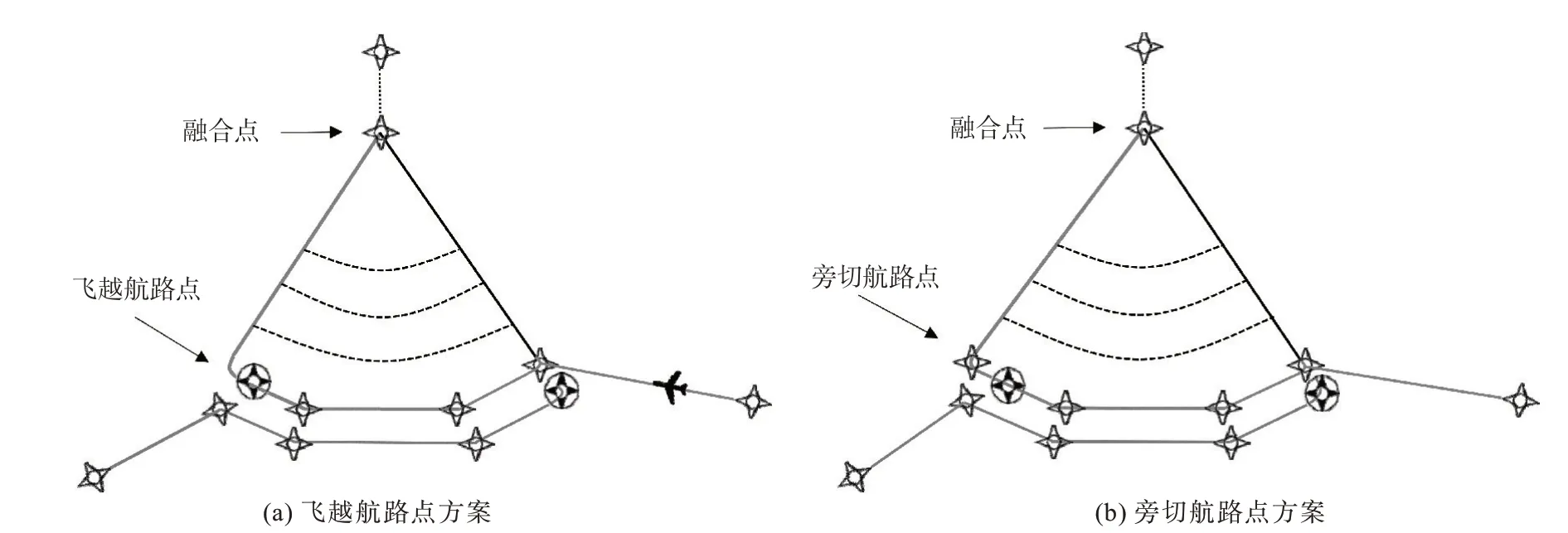
图6 点融合系统备用程序
2)复飞。如图7 所示,复飞之后一般分两种情况,一种是与起始进近定位点衔接,如图7(a)所示,即经过复飞程序后回到起始进近点,重新进入融合点进近程序。另一种是与排序边衔接,如图7(b)所示,复飞后进入与排序弧等距的虚拟弧,从虚拟弧进入排序弧,从而进入融合点程序。

图7 点融合系统复飞程序示意图
2 国内外PMS 的相关参数对比
PMS 目前已经成功地应用于挪威、爱尔兰、法国等17 个国家的25 个机场,遍布四大洲[12-13]。在对点融合系统的应用过程中,不同机场之间的点融合系统相关参数也有所不同,需要密切结合当地空域结构、交通流量、机场条件等设置点融合系统的结构,并且权衡各类设计参数设置,同时尽量结构简单、整体对称,保持点融合系统简单、直观,并满足安全的运行原则。
选取国外6 个机场和国内的上海浦东机场和广州白云机场对点融合系统内的角度参数和距离参数设计进行比对,见表1 和表2,最后结合点融合应用过程中的角度参数和距离参数的推荐值进行比较分析。
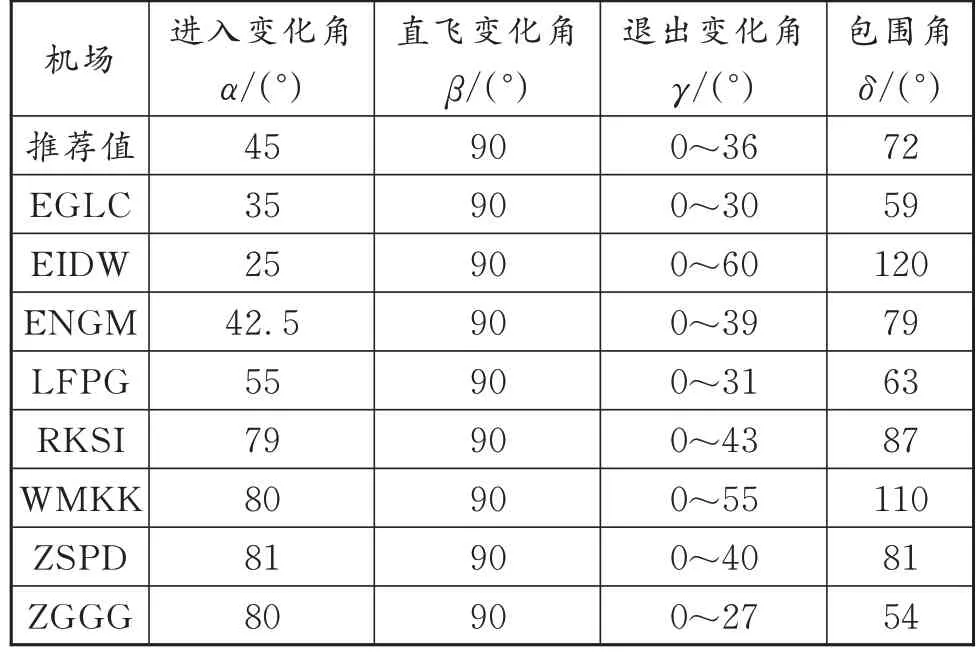
表1 点融合系统角度参数对比
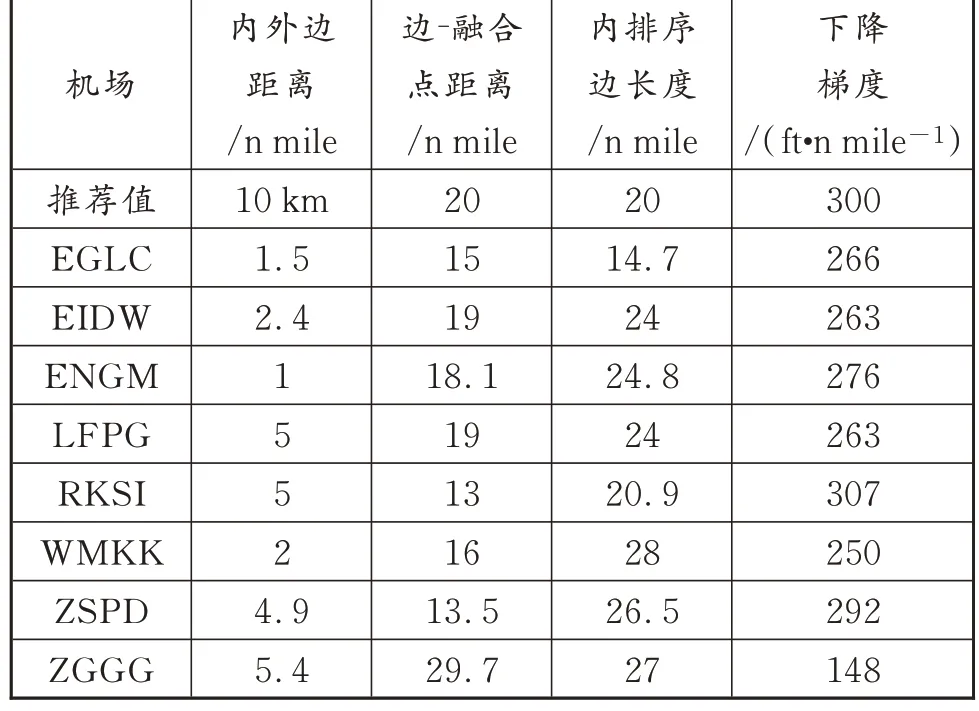
表2 点融合系统距离参数对比
通过对比不同机场点融合系统内的关键参数,不难发现参数的设置是根据机场终端区的运行环境所决定的。但是不同参数的大小设置应该满足点融合系统的运行规则。其中,排序边到融合点的距离用于下降高度,对于其设置视融合点高度限制和下降梯度决定;内外排序边的长度主要用于吸收延误,长度越长,吸收能力越强;内外边为内高外低,为了满足系统内的安全运行,内外边距离不应低于1 n mile;对于包围角δ的设置应该避免过大,减少不同方向进场交通流对风的敏感性。
3 国内PMS 应用实例
白云机场终端区共5 个进场移交点,如图8 所示,分别为ATAGA、IGONO、P270、IDUMA、GYA,其中,ATAGA 进场移交点为来自华北方向的航班,移交高度为4 200 m,占进港总量的20%;IGONO 进场移交点为来自华东方向的航班,移交高度为4 500 m,占进港总量的30%;P270 为来自东南沿海方向的航班,移交高度为4 800 m,占进港总量的6%;IDUMA 为来自香港东南亚方向的航班,移交高度为4 200 m,占进港总量的11%;GYA 为来自海南方向的航班,移交高度为3 900 m,占进港总量的33%。
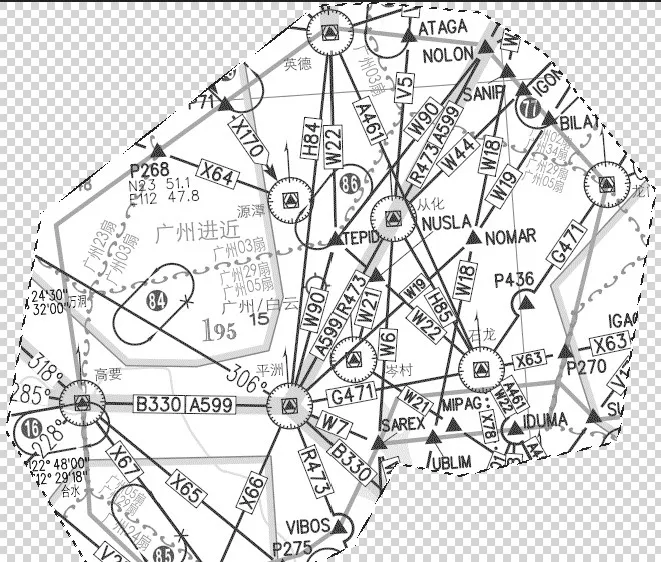
图8 广州白云机场终端区
机场传统运行进场图如图9 所示,2020 年3 月12 日启动点融合程序的设计,通过对来自机场终端区北向的6 条进场航线进行技术研究分析,在设计点融合进近程序时,对来自AGATA 和IGONO 进场方向的航班进行点融合系统运行模式设计。
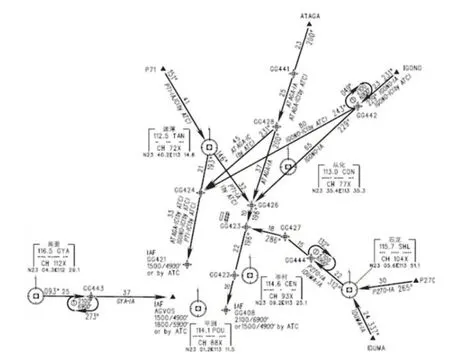
图9 广州白云机场标准仪表进场图
图10 为白云机场的点融合设计图,其中排序弧采用完全重叠模式,内排序弧以GG820 点为圆心,55 km 为半径。外排序弧以GG820 点为圆心,65 km为半径。根据飞行间隔标准,内外弧上设置4 个定位点,将内弧分为等分的5 段。在实际实施过程中,通过对高度、水平距离和速度进行控制来运行。对于高度控制,IRTAT 方向进港航空器,应在IRTAT前必须到达4 200 m(含)以下的高度进入外排序边,以免反向运行的航空器发生飞行冲突。外排序边的航空器在排序边飞行时,可以根据需要机组继续下降高度,但不得低于3 300 m(含)。OLPAB 方向进港航空器,应保持4 500 m(含)以上的高度飞越GG814,严禁低高度进入内排序边,以免与反向运行的航空器发生飞行冲突。必须保持4 500 m(含)以上的高度。当内排序边航空器脱离排序边转向融合点飞行后,可指令航空器继续下降高度,但要注意必须与内排序边上飞行的其他航空器及外排序边转向融合点后穿越内排序边的航空器配备足够安全间隔;对于水平控制,严格按照排序边飞行。按13~15 km 的目标间隔依次调配各排序边上的航空器脱离排序边飞向融合点。包络区间严禁偏航。遵循“先到先服务”的原则,按照进入点融合程序的先后次序依次调配内外排序边的航空器逐个脱离排序边转向融合点。特殊及重要航班(特殊任务航班、特情航班等)可以为航空器提供优先服务,优先指挥航空器脱离排序边转向融合点;对于速度控制,排序边上必须严格按照速度限制飞行。在内外侧排序边上,保持250 Kt 速度飞行,不得对航空器进行速度调整。转向融合点至融合点脱离的阶段严格遵守速度限制。特殊情况下为保证安全间隔,可以适当调整航空器速度,但该速度不得小于220 Kt(含)。
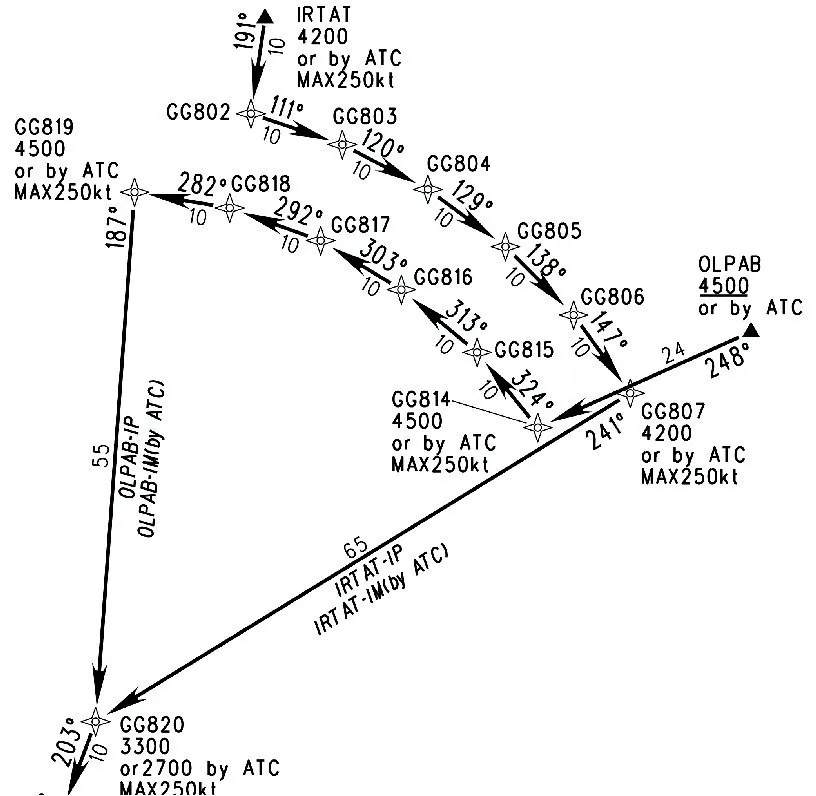
图10 广州白云机场终端区点融合进近程序
提取广州白云机场某天的航班计划对终端区传统进近程序和PMS 运行模式进行实时仿真,得到表3 的结果。

表3 传统运行模式和PMS 运行模式比对
通过对实时的仿真结果进行分析,可以发现在大流量条件下点融合技术可以提高进港效率和终端区的运行品质。其中,在进港质量方面,使用点融合运行模式可以使航班的间隔十分均匀;在管制员工作负荷方面,指令数减少24%~33%,对于航向指令而言,几乎减少至零,降低了管制员的工作负荷的同时,也使管制员更精准地掌握飞行动态,完成管制任务。
4 结语
作为一种新型的进场程序,点融合进近程序有其独特的优势,在缓解终端区管制员工作负荷和增加航班准确率方面有着积极的作用。从点融合系统的设计和终端区应用方面进行叙述,最后结合国内机场终端区的应用实例进行了实时对比分析,可以为点融合技术在中国其他大型运输机场终端区的应用提供参考。
