无源定位中时差测量方法的研究
2021-08-12顾文金
罗 熙,顾文金
(中国电子科技集团公司第五十一研究所,上海 201802)
0 引言
时差测量被广泛运用于电子战、移动通信、雷达、卫星及导航技术,时差测量的方法主要有直接计数法、信号相关法、相位差法[1]。电子战中时差定位设备的时差测量通常采用本地量化法和信号中频转发法实现。本地量化是对信号到达时间(TOA)的检测,通常采用直接计数法;信号中频转发时差提取一般采用信号相关法,本文主要讨论了一种在信道化检测后再进行信号相关提取时差的方法。
1 时差测量方法
本文对2站(主、副站)的时差测量方法进行讨论分析。
1.1 本地量化法
本地量化法要求各站均配备高精度时统设备,主、副站分别对信号前沿进行检测,提取TOA,TOA的差值即为时差测量值。本地量化方式的优点是无需站间通视(数据加密后可通过4G/5G通信网络或光纤转发),站址选取灵活。
1.2 信号中频转发法
中频转发方式,将副站的信号只做相应的模拟变频,不做任何数字处理,将变频后的中频通过光纤或微波转发到主站进行时差提取,副站信号到达主站后,采用信号相关法提取时差。信号转发方式不足之处是站间采用无线通信时要求站间通视,不利于站址选取。
2 影响时差精度的因素
影响时差测量精度的因素主要有以下几方面[2-3]:
1)时统设备同步误差
时统定义为对位于不同地点的2个设备调整成时间相同的过程,本地量化法需高精度时统设备,目前工程上的时统设备同步性能可以控制在10 ns以内。
2)噪声引起的随机误差
采用脉冲前沿的检测处理,噪声引起的上升沿抖动:

对于2个信噪比和上升沿相同的信号,由此导致的时差偏差:

式中,tr为信号上升沿时间,s/n为信噪比。
3)信号幅度起伏引起的误差
由图1可以看出信号幅度起伏导致的时差测量偏差Δτ=TOA 2-TOA 1。
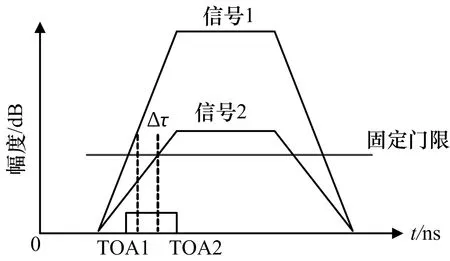
图1 采用固定门限对不同强度信号的TOA测量
为解决上述问题,工程上通常采取自适应门限(半功率门限与基础噪声门限相结合的方式)进行信号的TOA测量,半功率门限一般取信号半功率点作为门限值,基础噪声门限则采用统计一段时间内信号电平的平均值作为参考值,2种门限取其大值作为最终的信号检测门限。
采用自适应门限后,不同幅度信号的TOA检测情况如图2所示,可见自适应门限能够解决信号幅度差异带来的时差偏差。
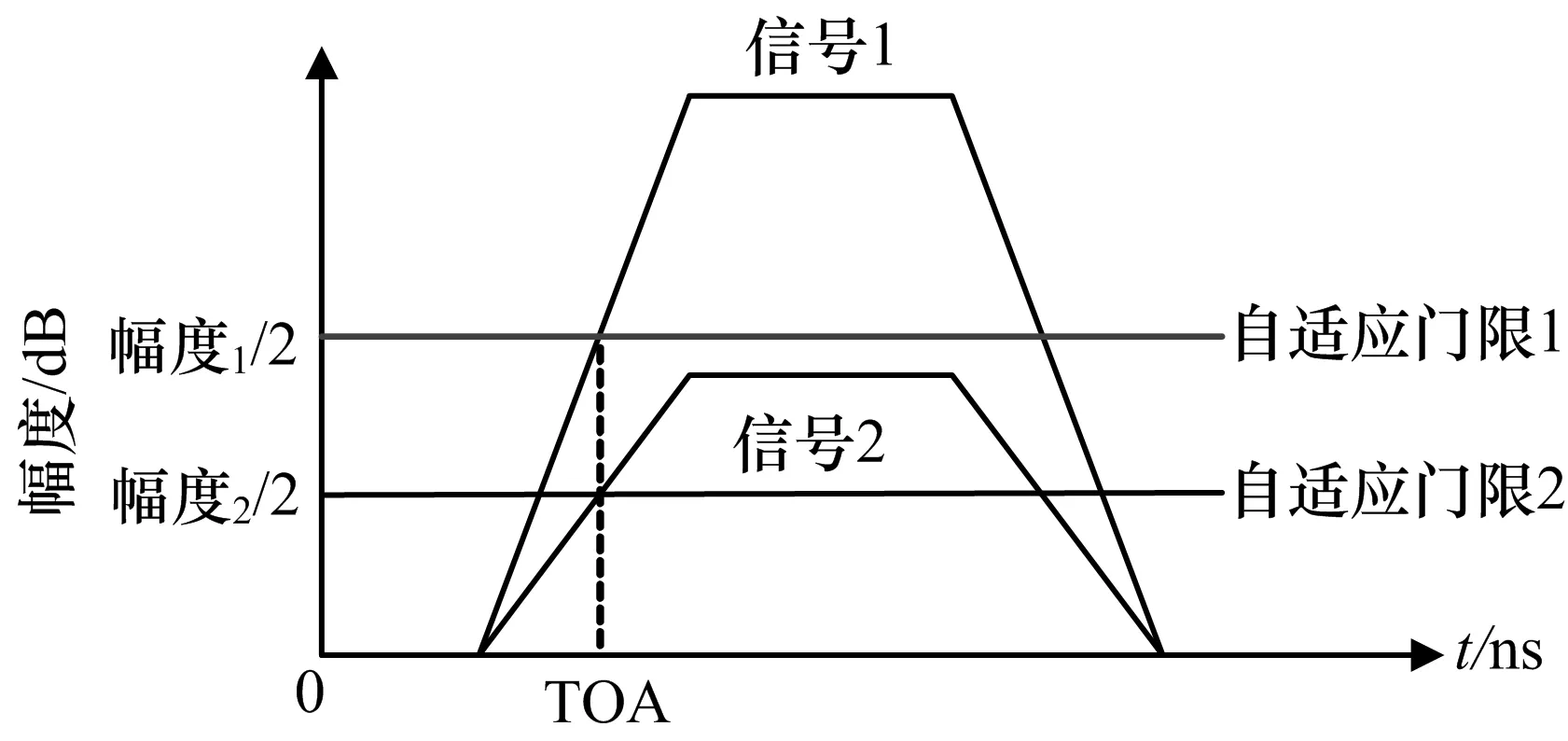
图2 采用自适应门限对不同幅度信号TOA的测量
4)站址测量误差
站址测量误差引入的时差偏差可以用下式表示:

式中,Δd为站间距测量最大误差;c为光速。
目前工程上对站间距的测量误差Δd可以达到1 m内,即Δτ小于1.67 ns。
本文主要分析信噪比对时差测量精度的影响。
3 时差测量理论分析
3.1 本地量化时差测量方法
本地量化只需测量出信号到达各站的TOA,即可获得最终时差。
TOA测量原理如图3所示,中频信号通过AD量化产生离散数字信号,通过加权叠加结构(WOLA)[4]信道化后,利用cordic算法形成数字包络,与自适应门限作比较后产生保宽脉冲输出,由时钟计数得到信号的TOA。
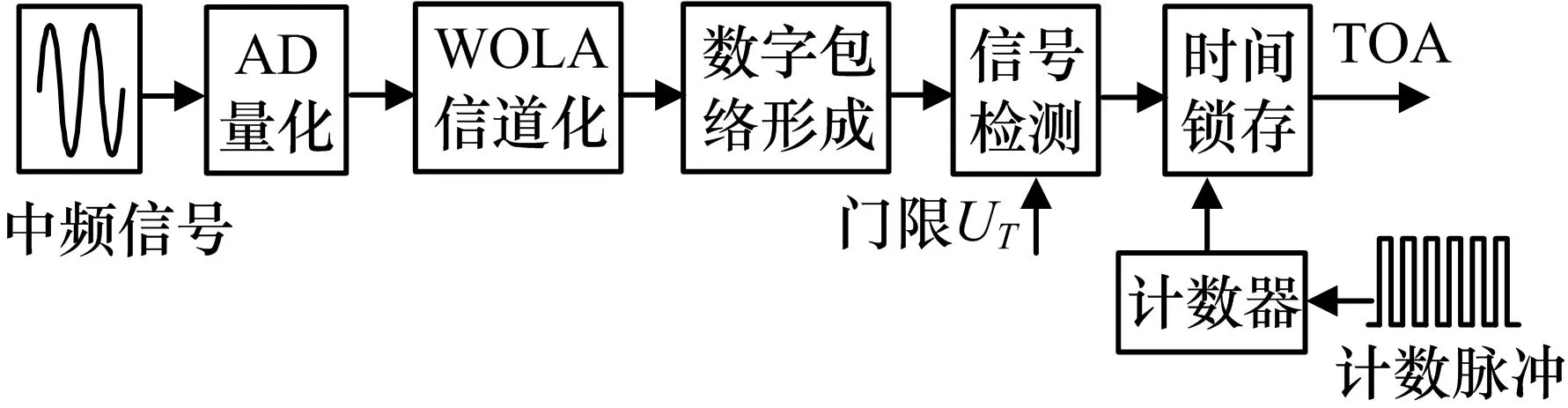
图3 TOA测量原理框图
WOLA结构信道化原理如图4所示,每输入D点数据后,将N点采样数据与N阶滤波器系数相乘,折叠累加后,再做L点FFT,产生一组L点的并行数据输出,如此递推,生成信道化流水输出。
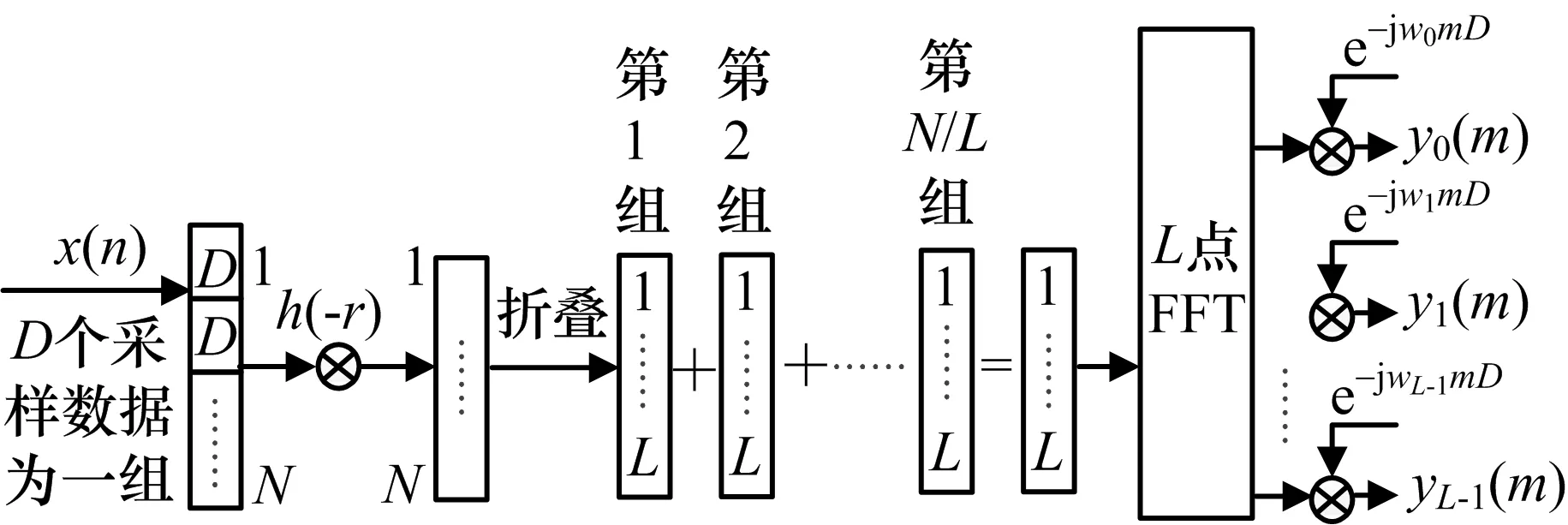
图4 WOLA结构信道化原理图
对图4做如下推导分析:
传统低通滤波器信道化采用下变频、滤波、抽取设计,第k路信道输出为:

式中,w k=2π/L,k=0,1,2,…,L-1。L为信道数,D为抽取倍数,h(mD-i)为时间窗,mD为时间窗的延迟参数,假设r=mD-i,则有:
令x m(r)=h(-r)x(r+mD),则X k(m)即x m(r)的离散傅里叶变换,为了能采用FFT运算,需将x m(r)进行折叠,每L点一组进行折叠,折叠后再进行累加。

式中,r=0,1,2,…,L-1;将累加的结果做L点FFT,即:

最后下变频得到各信道输出的基带信号y k(m)。
信道化输出的是IQ分量,FPGA中无直接计算指数、开方的函数,通过cordic算法实现数字包络形成,利用自适应门限对产生的数字包络进行TOA测量,由于FPGA的信号处理速度不及AD信号采样速度,一般对AD采样数据进行降速处理,降速带来TOA的测量分辨率下降,进而降低了时差测量精度。
3.2 信号中频转发时差测量方法
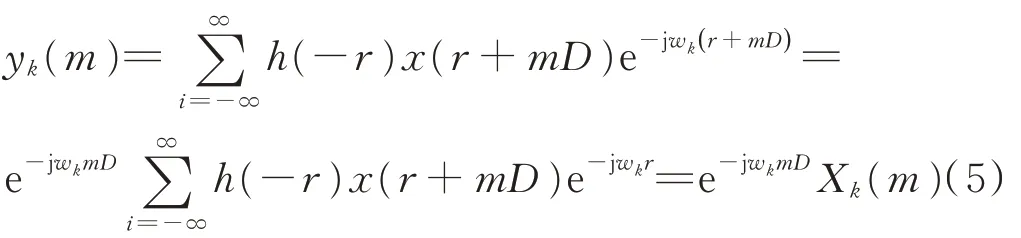
中频转发方式时差测量分2步:首先采用与本地量化一样的方法进行信号前、后沿检测,如图5所示,得到粗时差ΔT1=TOA 2-TOA 1(本地量化最终时差),以信道化检测的信号前、后沿为基准,分别向前和向后预留一定信号余量,将信号完整“套出”,本文预留余量为1µs,将“套出”的信号进行相关检测提取精时差ΔT2,最终时差ΔT=ΔT1+ΔT2。
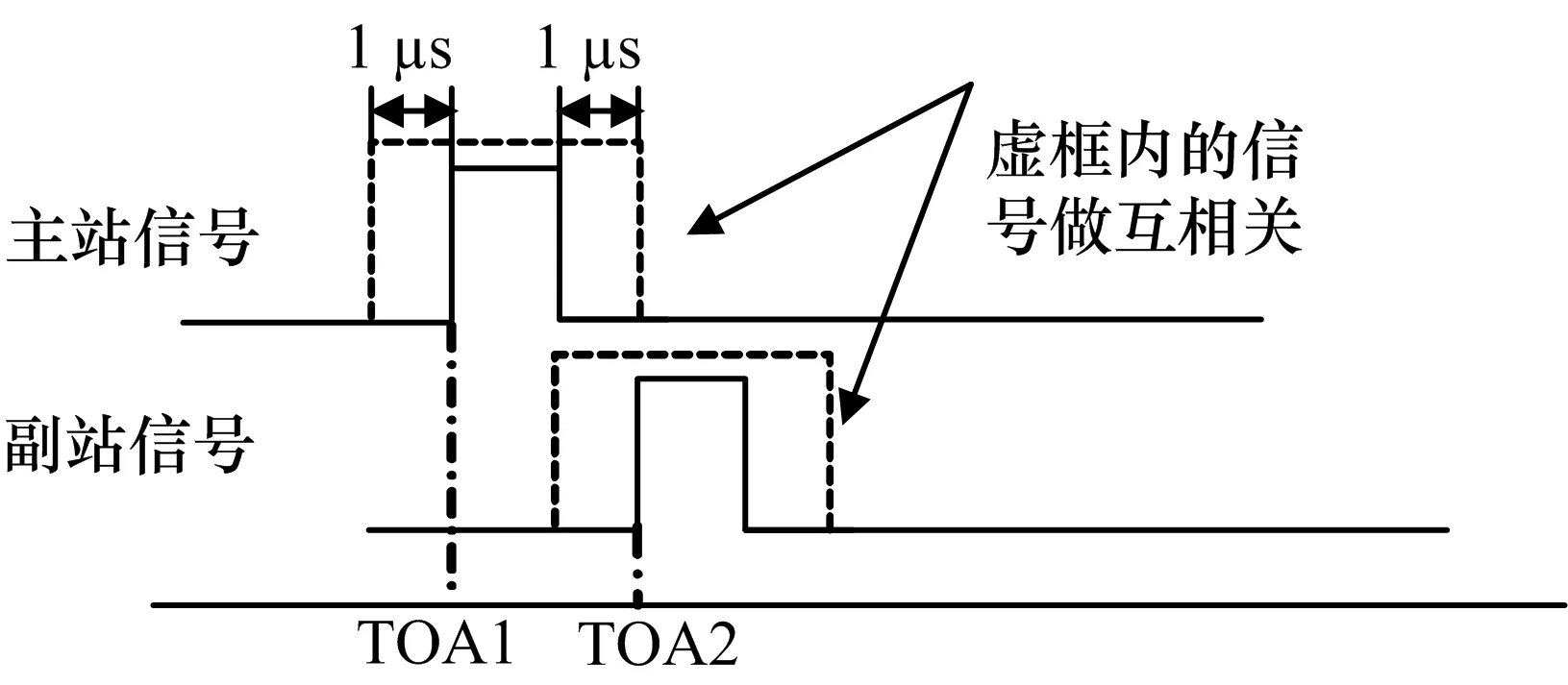
图5 时差提取原理图
本文所述的的相关时差提取是基于信道化检测后,再引导信号相关的方法,等同于信号预处理后再做相关,此方法与信号直接做盲相关提取时差相比,在很大程度上节约了FPGA处理资源。由于相关采用的是不降速AD信号,时差测量的分辨率等于采样间隔,因此理论上精度优于本地量化方式。
相关法测时差原理是基于信号的相似性,信号相似程度越高,时差测量结果越准,相关法可采用时域相关或频域相关[5]实现,本文仿真采用的是频域相关。
1)时域相关
时域相关的本质是实现2个信号的卷积运算,工程实现上是一个信号序列与另一个信号序列倒序的卷积,卷积结果所对应的峰值即为时差值。
2)频域相关
实际信号均为实信号,频域相关提取时差时,首先将各站侦收的信号做希尔伯特变换,然后进行FFT运算,再对主站的序列取共轭,2站序列相乘后求IFFT,对应IFFT序列模值的最大值即为时差值,相关原理如图6所示。
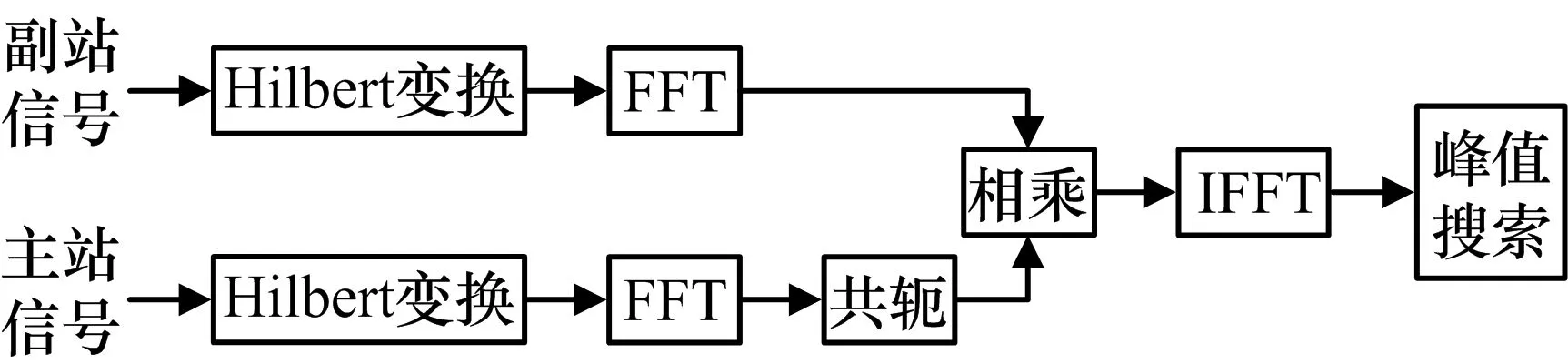
图6 频域相关原理图
4 仿真分析
仿真条件:信号类型为线性调频信号;采样频率fs=500 MHz,起始频率f=122 MHz,带宽3 MHz,脉宽PW=1µs;信号1脉冲上升沿时刻TOA 1=2 000 ns;信号2脉冲上升沿时刻TOA 2=5 600 ns;真实时差ΔT=TOA 2-TOA 1=3 600 ns。
1)采用本地量化方式,不同信噪比情况下的仿真
采用N=128阶滤波器,L=64点FFT,信道带宽为500/64=7.812 5 MHz,信号在第16信道输出。
主、副站信噪比为15 d B时,采用自适应门限检测情况如图7所示,采用了4倍降速处理方式,信号1到达时间TOA 1=229,信号2到达时间TOA 2=677。
时 差 ΔT=(TOA 2-TOA 1)×8=448×8=3 584 ns。
主、副站信噪比为3 d B时,采用自适应门限检测情况如图8所示,信号1到达时间TOA 1=239,信号2到达时间TOA 2=686,时差ΔT=(TOA 2-TOA 1)×8=447×8=3 576 ns。
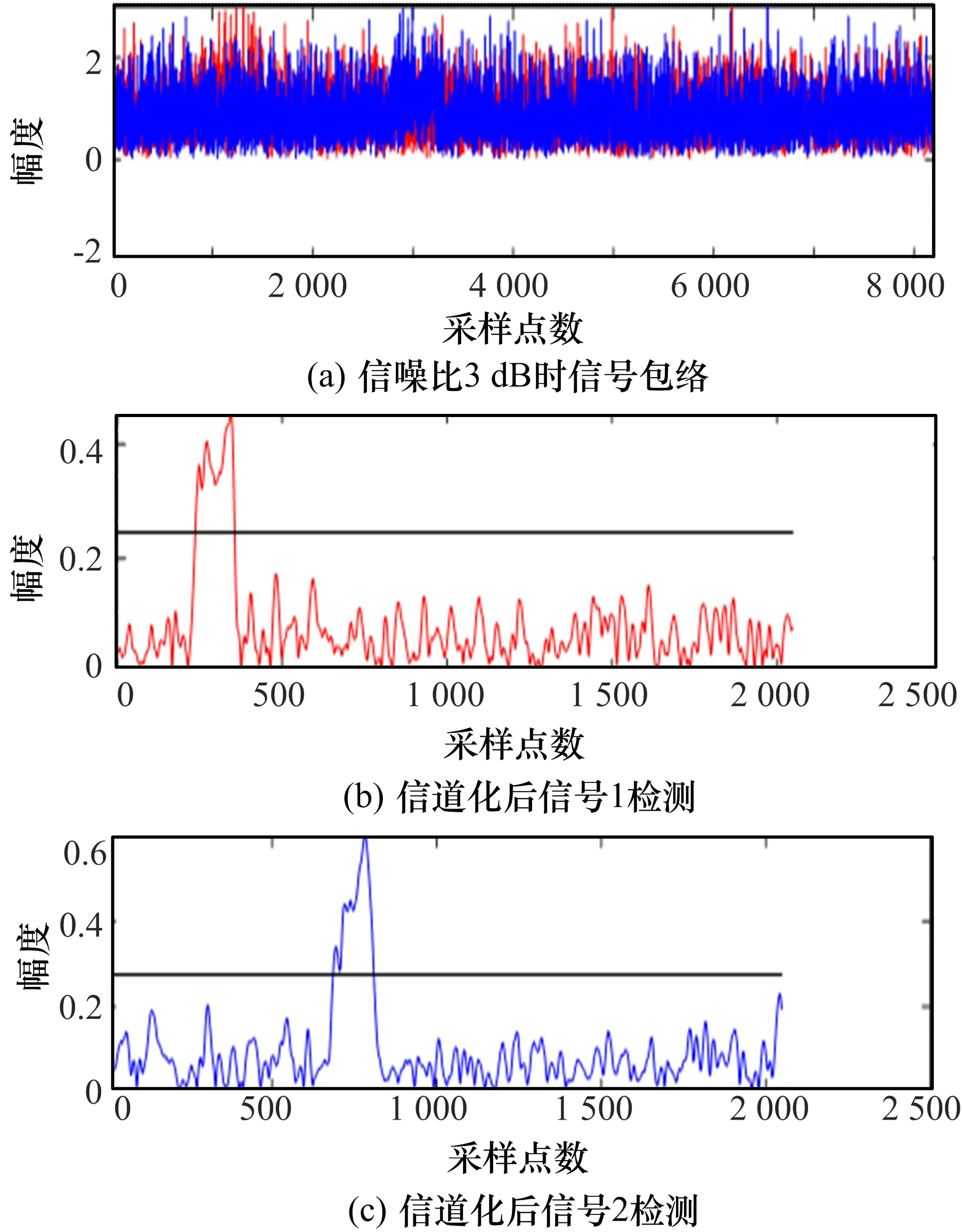
图8 信噪比3 dB时信号检测情况
信噪比分别为15 d B和3 d B时,200次蒙特卡洛仿真时差测量统计情况如图9和图10所示,均方根误差分别为10.7 ns和51.9 ns。
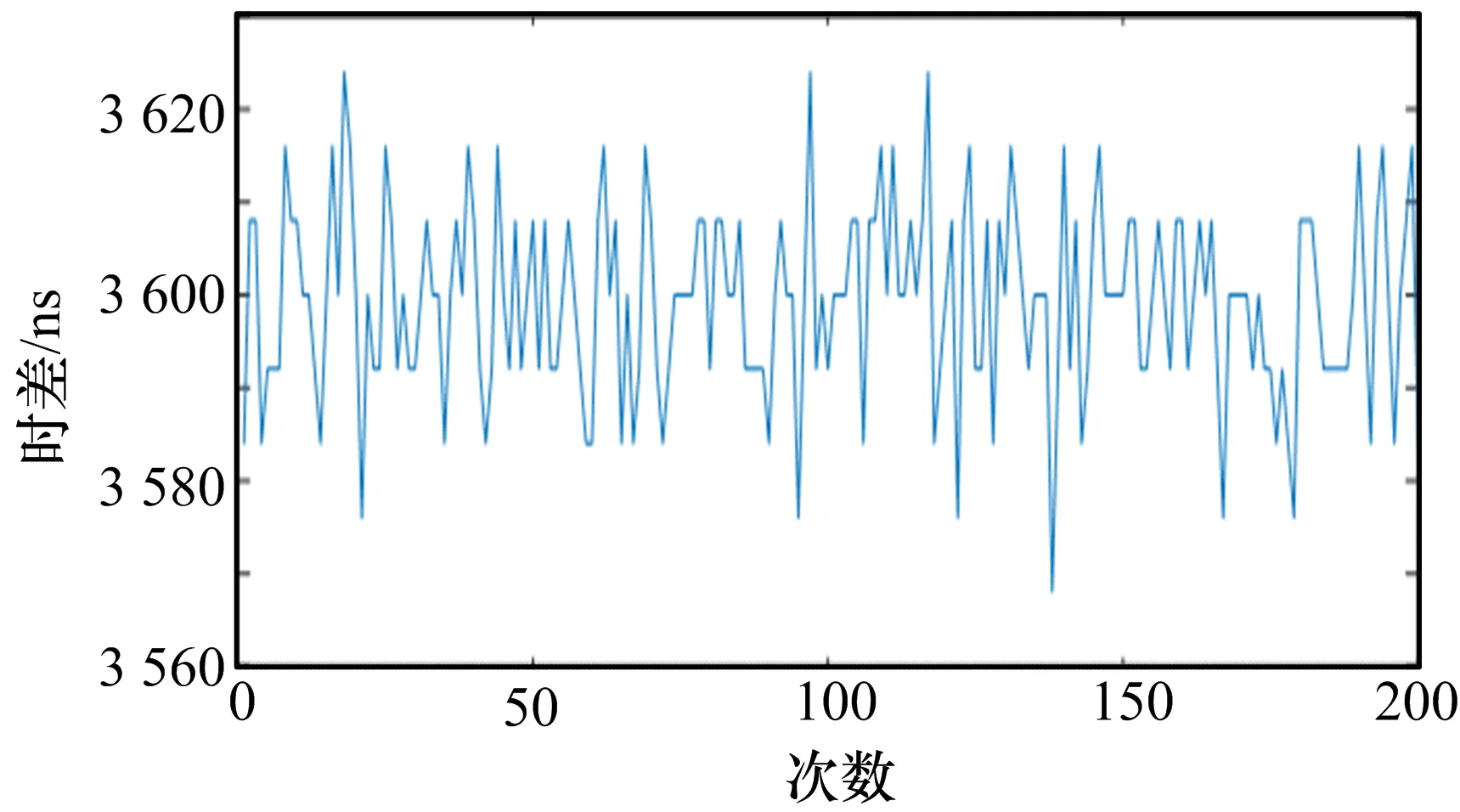
图9 时差统计情况(信噪比15 d B)
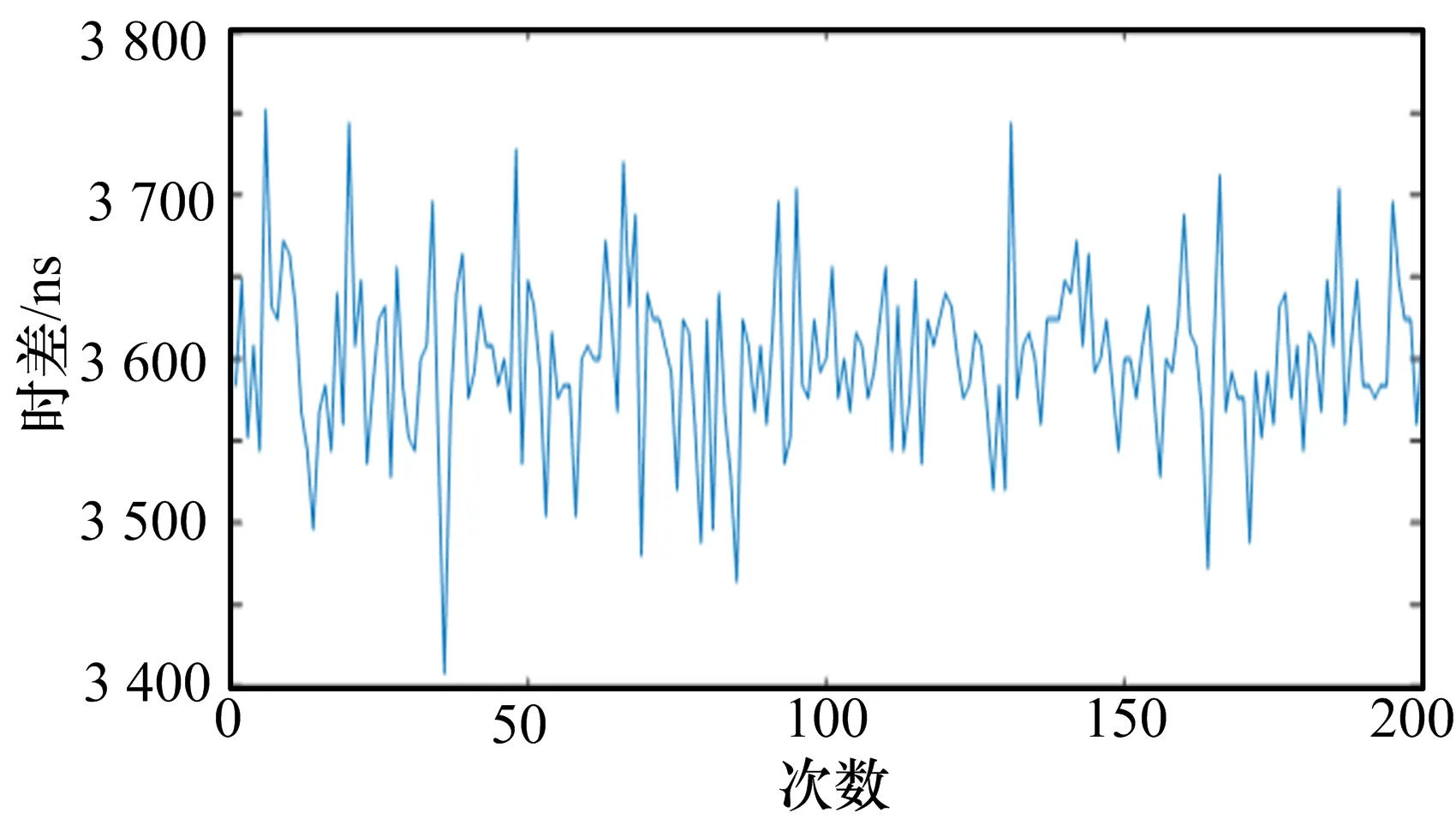
图10 时差统计情况(信噪比3 dB)
2)信道化检测后,再做信号相关时差测量
采用如图7一样的检测方法,提取粗时差:ΔT1=(TOA 2-TOA 1)×8=3 584 ns,再利用频域相关提取精时差,如图11所示,相关峰位置为10,分辨率为2 ns,所以精时差ΔT2=(10-1)×2=18 ns;最终时差ΔT=ΔT1+ΔT2=3 584+18=3 602 ns。
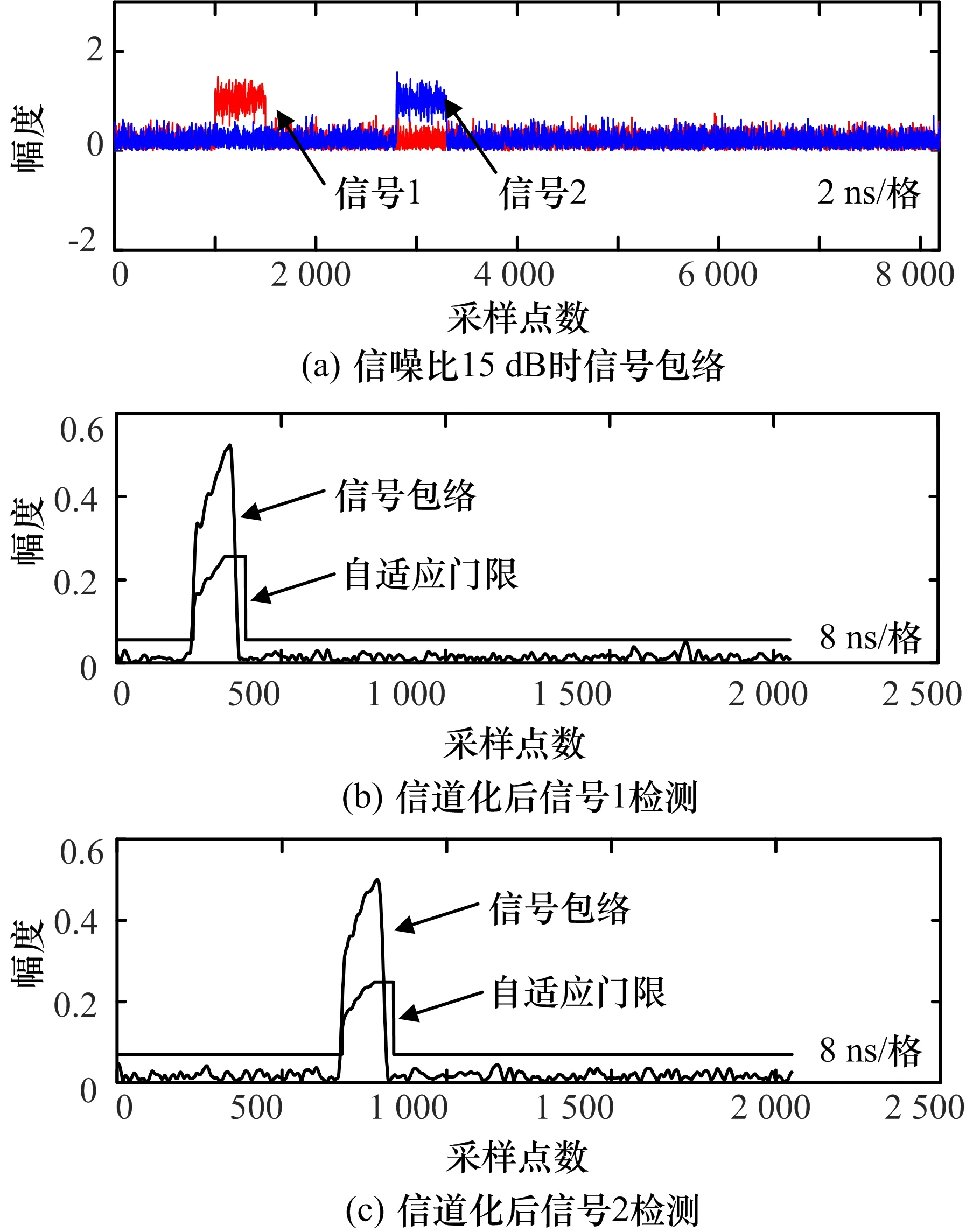
图7 信噪比为15 dB信号检测情况
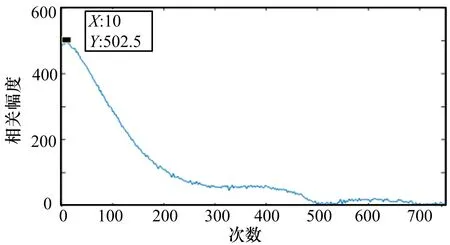
图11 信噪比15 dB精时差检测
信噪比为15 dB和3 dB时,200次蒙特卡洛仿真时差统计情况如图12和图13所示,均方根误差分别为3.8 ns和27.1 ns。
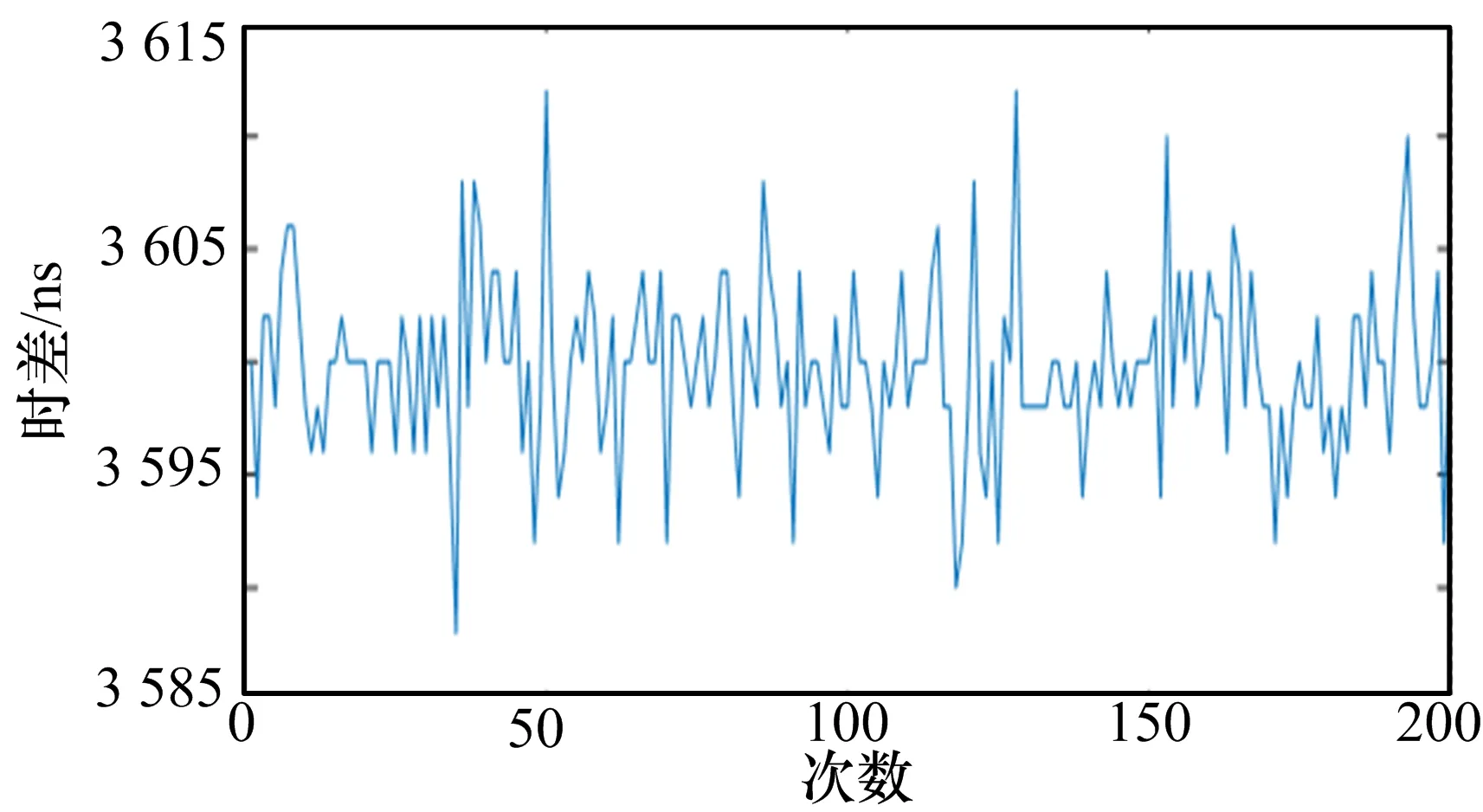
图12 时差统计情况(信噪比15 dB)
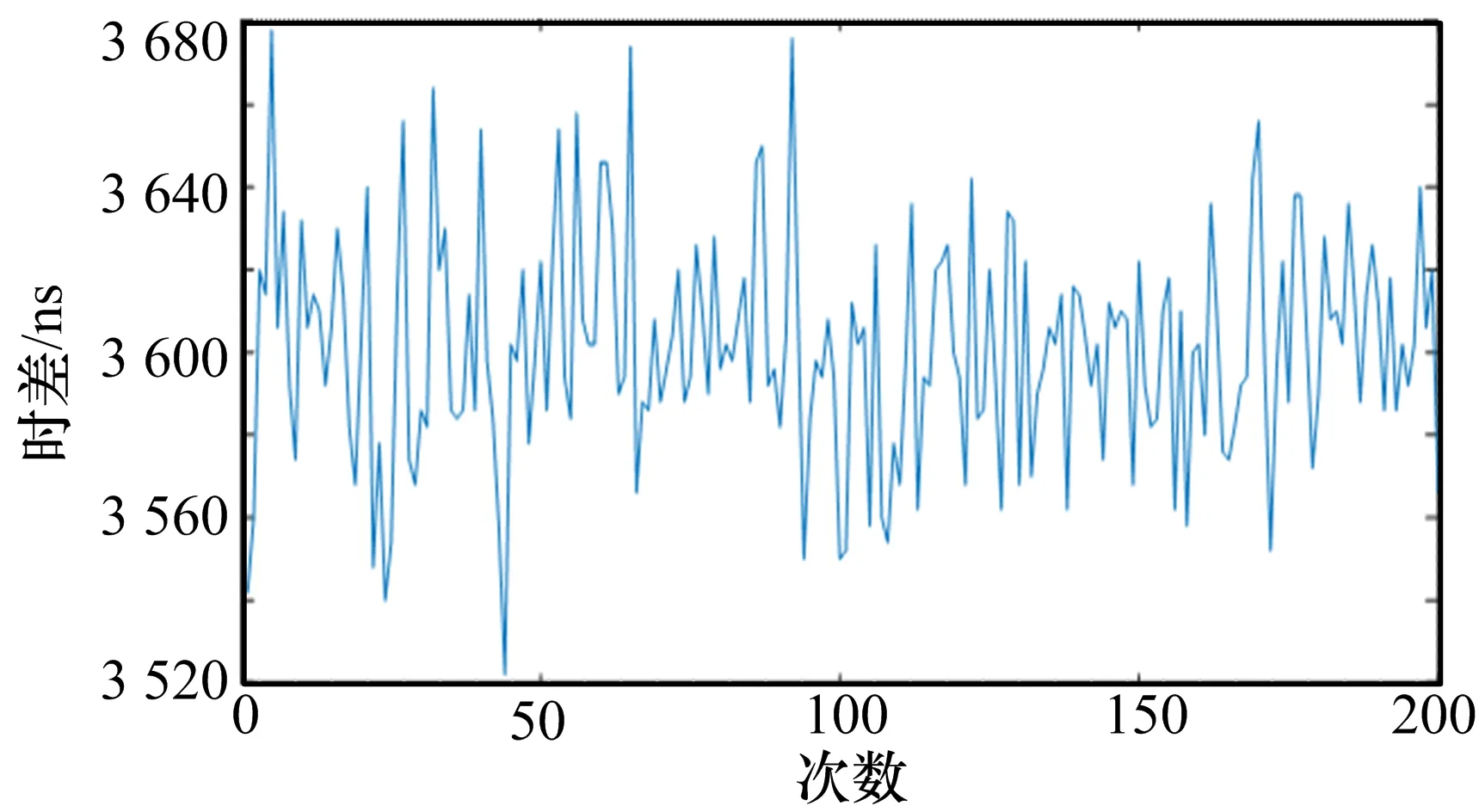
图13 时差统计情况(信噪比3 dB)
2种时差测量方法在不同信噪比下,200次蒙特卡洛仿真,时差测量结果如表1所示。
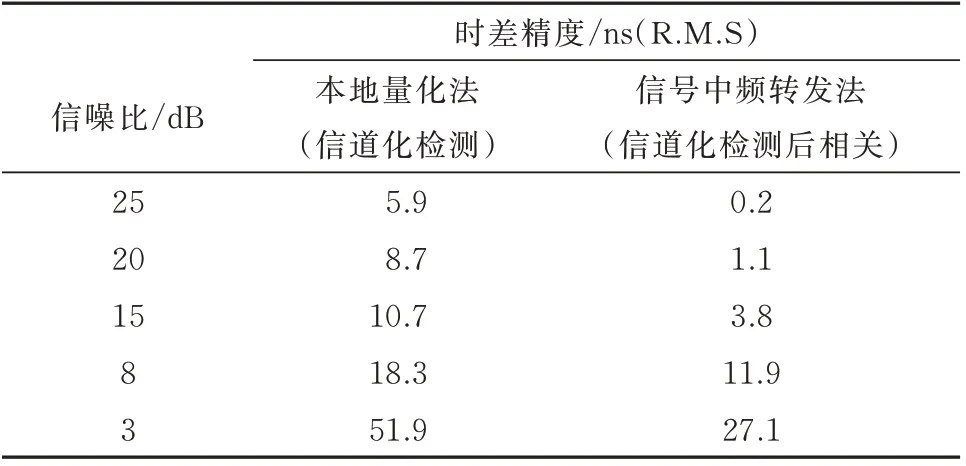
表1 不同信噪比下的时差测量情况
5 结束语
本文介绍了时差测量的2种方法,分析了利弊,并对这2种方法的实现进行了理论分析。信道化检测预处理后,再进行信号相关时差提取,相比于信号盲相关节约了FPGA处理资源,可供工程实现参考。通过仿真分析得出以下结论:信道化检测后再利用信号相关的时差测量方法,时差精度优于只检测信号TOA获取时差的测量方法;改善信噪比有利于提高时差测量精度。■