“低慢小”目标协同防控指挥控制系统研究*
2021-08-12董建超辛振芳苏成谦邱旭阳
董建超,彭 丽,辛振芳,苏成谦,邱旭阳
(1.北京机械设备研究所,北京 100854;2.中国人民解放军93160部队,北京 100076)
0 引言
“低慢小”飞行器是指具备飞行速度慢、飞行高度低、散射面积小等全部或者部分特征的无人机、轻型飞机、滑翔伞、动力伞等航空器。“低慢小”目标飞行高度一般在1 500 m以下的低空空域,飞行速度小于200 km/h,雷达反射面积小于2 m2,具有成本低廉、机动灵活、隐蔽性强等优势,在世界各国航空领域得到广泛应用[1-2]。然而,飞速发展的飞行器技术也是一把双刃剑,利用无人机等“低慢小”飞行器违规飞行或者从事违法犯罪活动将会严重影响到国家安全和发展[3-5],例如:2017年成都双流国际机场短期内连续发生多起无人机“黑飞”事件;2018年1月6日俄罗斯赫梅米姆空军基地和塔尔图斯补给站遭受9架无人机袭击。利用无人机从事违法活动带来的威胁危害主要有以下方面:机载航拍摄像机和定向拾音麦克风可以在高空偷窥和窃听,窃取国家秘密及重要商业秘密;小型无人机的负载可达几十千克,如果携带小型炸弹和危险化学品,将对防控要地和公众安全带来严重影响;无人机非法在机场附近飞行,将严重影响正常民航飞行秩序,对乘客和机组人员的安全造成威胁;利用小型无人机在边境进行走私货物甚至毒品等犯罪活动,将会威胁边境秩序,影响国内市场和人民群众的生命健康;敌对势力利用无人机散播传单、悬挂反动标语,严重影响社会正常秩序。
针对低空空域的监测管控盲区,建立无人机等“低慢小”目标的防控体系显得尤为迫切。各国科研机构和科技公司均投入了大量人力物力开展“低慢小”目标防控技术及装备的研究[6-10]。德国安诺尼公司研发的单点及多点布控的无人机侦测系统,可用于居民区、商业中心等人员密集区域的无人机目标监测。美国巴特勒国家安全研究与发展公司研发出一款外形酷似步枪的无线电射线步枪,设备前端上部安装了杆状天线,能够实施非破坏性干扰,使无人机失联悬停或者迫降。中国航天科工二院研制的柔性网拦截系统,通过光电跟踪瞄准,可对无人机目标实施空中捕获。虽然“低慢小”防控技术发展迅猛,但是仍然难以完全消除“低慢小”目标带来的威胁。防控技术难点主要在于:低空空域的复杂气候、建筑物遮挡等因素,对探测过程形成噪声、衰减干扰;“低慢小”目标低速飞行或者悬停,导致基于动目标监测的雷达难以发现目标,需要适用于慢速运动的光电探测装备完成协同跟踪;“低慢小”目标反射截面小,向外界发射的光信号和声信号比较微弱,使得传统探测手段的探测距离、发现概率都受到很大限制,需要对防控区域进行多装备布防,统一指挥调配;“低慢小”目标操控灵活机动,需要处置拦截装备具有快速响应能力和高精度打击能力,而且兼具安全性和可靠性,避免拦截过程造成二次毁伤,而这些要求很难在单一的拦截装备上得到满足。因此,有必要构建预警探测、侦察监视、拦截打击一体化的“低慢小”目标协同防控指挥控制体系,提高对“低慢小”目标的整体防控能力,为城市、机场、核电站等防护要地的安全与正常秩序保驾护航。
1 协同防控指挥控制系统设计
1.1 系统组成
“低慢小”目标协同防控指挥控制系统的基本组成包括3大功能单元,即预警探测单元(输入)、信息处理指挥控制单元(系统)、处置拦截单元(输出),如图1所示。
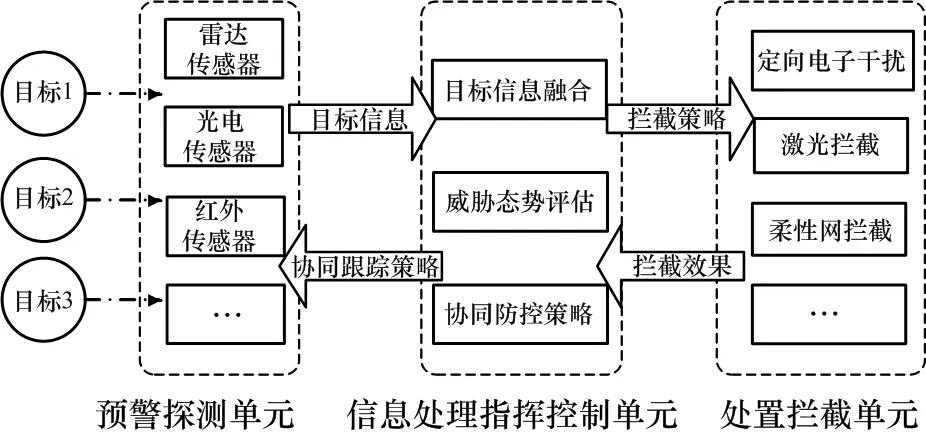
图1 “低慢小”目标协同防控指挥控制系统示意图
预警探测单元由雷达、光电/红外、声学等多种类型的传感器组成,它的主要功能是采用声、光、电等多元传感设备探测“低慢小”目标的位置、航迹航速等信息,提高监测精度和速度以及降低虚警概率。信息处理指挥控制单元的主要功能是对各个装备进行时间空间初始化,对获取的探测信息进行特征提取与信息融合,形成实时、连续、准确的威胁态势评估与协同防控策略,制定协同防控作战策略,发送拦截作战指令。处置拦截单元由定向电子干扰、激光拦截、柔性网拦截等多种类型的拦截装备组成,它的主要功能是接收拦截策略,通过毁伤、遣返、捕获等软硬杀伤方式完成相应的拦截任务。
1.2 指挥控制架构特征
随着信息交互技术的发展,指挥控制体系由传统的自顶向下层次型指挥控制模式逐渐向去中心化指控模式转变。传统模式结构简单,易于控制,便于指挥者进行统一决策,缺点是上层节点工作负载和信息交互量很大,容易造成过载现象,而且系统抗毁性弱,当某一节点受损或失效,可能造成其下属节点瘫痪。去中心化指控模式采用扁平架构,能够减少指挥层次,探测装备、拦截装备等资源装备主体具有自主控制权,装备之间通过信息共享交互,实现横向协作。去中心化指挥控制模式强调纵向贯通和横向融合,最大化地发挥资源主体的协同自主特性,系统灵活性得到提升,同时抗毁能力得到增强,是现阶段最适合低空空域“低慢小”目标协同防控的指挥控制方式。
“低慢小”目标协同指挥控制系统指挥控制架构如图2所示。系统采用扁平结构形式,指挥控制中心制定任务规划,将控制权下放到探测装备、拦截装备等各个资源主体,同时对资源主体进行统一监控,所有的目标信息、拦截策略、拦截效果均通过信息处理网络平台实时地共享交互,各个资源主体协作同步完成防控任务。
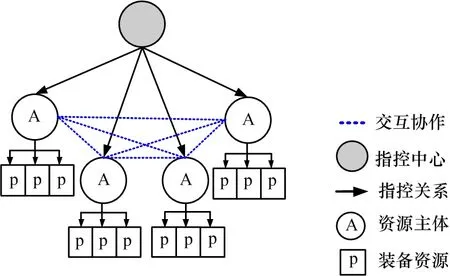
图2 指挥控制架构
2 系统网络平台设计
“低慢小”协同防控指挥控制系统基于网络平台搭建,可快速扩展,部署多探测跟踪装备、多拦截反制装备的组网联动模式。通过约定的通讯协议,所有信息在交换机进行汇聚交互,各个装备无需关注网络基础结构层的拓扑结构,只需按照接收的目标信息、拦截策略等通讯报文,协同执行防控作战任务。“低慢小”协同防控指挥控制系统网络拓扑结构如图3所示。
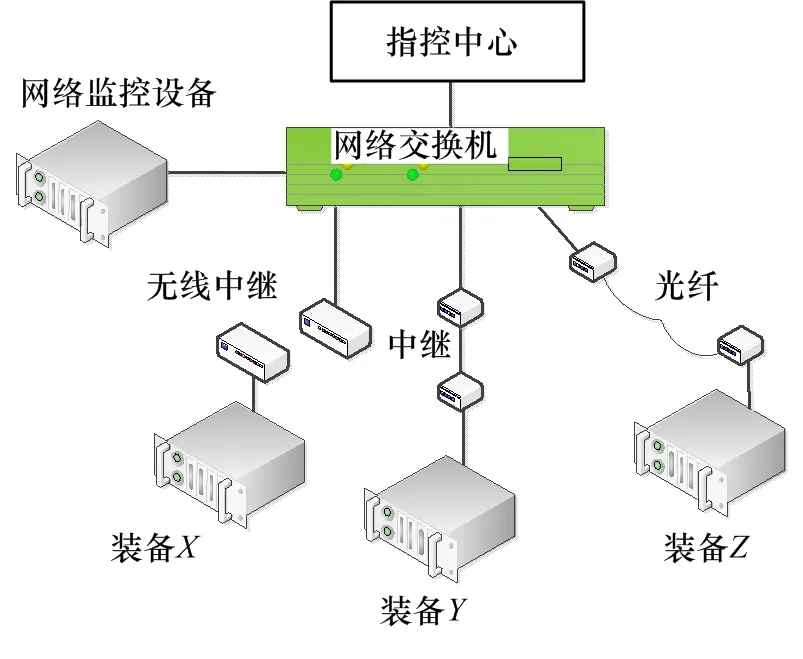
图3 指挥控制系统网络结构
网络平台基本构成设计如下:
1)网络交换机:采用双网卡设备相互备份,提高网络通信的可靠性,当其中1台出现故障,不会影响整个网络的工作;
2)网络监控设备:监视网络运行和数据录取,并能对网络中出现的故障进行诊断。网络监控位于IP层,按严格时序进行解析与分析,判断平台通信基础结构的状态;
3)无线中继:当装备地理位置不适合布置网线或光纤时,采用无线中继方式,实现设备与交换机的连接。无线中继在数据链路层实现有线—无线—有线的转换;
4)有线中继:当有线非光纤连接的装备与交换机距离超过规范规定的距离时,需要采用有线中继实现对信号的再生与重整。有线中继实现在数据链路层的信号再生与重整;
5)光纤:设备与交换机采用光纤连接。光纤采用多模多芯形式。
3 系统工作流程
“低慢小”协同防控指挥控制系统的基本工作流程如图4所示,具体工作内容阐释如下。
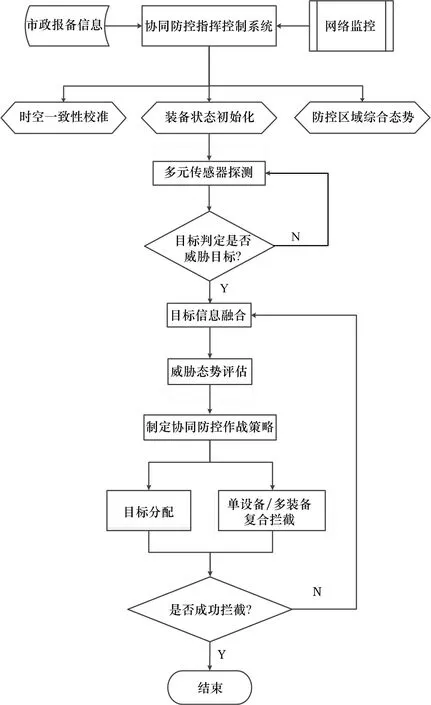
图4 “低慢小”目标协同防控指挥控制系统工作流程
系统完成部署后首先进行设备初始化,进行时空一致性校准,消除信息交互误差。通过网络监控设备实时监测系统各个装配状态以及防控区域的综合态势,包括被防护区域位置信息、当前防控区域覆盖情况等。同时,接收市政报备信息,防止误打击。
防控指挥控制系统开始工作,多元传感装备进行实时预警探测,将威胁目标信息上报信息处理指挥控制单元进行目标信息融合。根据被防护对象的位置信息、重要程度、目标距离、航速等信息进行威胁态势评估。防控目标与防卫目标的距离越近,则对防卫目标的威胁程度越大,威胁度增速越快,反之,威胁程度越小。根据装备状态,形成实时、连续、准确的威胁态势评估与协同防控策略,包括:目标分配、单装配拦截/复合装配拦截等。
处置拦截单元接收到拦截策略后,开展实时拦截作战,并反馈拦截结果,依据拦截效果决定是否实施二次拦截。若目标消失或者远离防控区域,表示成功拦截,完成本次防控。若目标仍然存在威胁,信息处理指挥控制单元继续进行目标信息融合,形成新的拦截策略,实施二次拦截。
系统在某些装备单元失去探测或者拦截能力时,仍可有序协同地执行“低慢小”目标防控任务,具有较强的生存能力和任务完成能力。各个装备能够根据任务需求载荷,完成协同探测、协同攻击等协同防控任务。
4 结束语
本文针对低空空域“低慢小”飞行器难以监管的问题,开展了预警探测、侦察监视、拦截打击一体化的“低慢小”目标协同防控指挥控制系统研究。系统基于网络架构设计,采用去中心化指挥控制模式,将控制权下放到探测装备、拦截装备等各个资源主体,同时对资源主体进行统一监控,所有的目标信息、拦截策略、拦截效果均通过信息处理网络平台实时地共享交互,实现“低慢小”目标的协同防控。系统具备快速部署能力和可扩展性,发挥资源主体的协同自主特性,能够为“低慢小”目标防控系统研制和集成应用提供设计指导。■