基于模拟机的空中交通管制复杂度预测模型
2021-08-11朱承元惠雅婷王毅鹏
朱承元, 惠雅婷, 王毅鹏
(中国民航大学空中交通管理学院, 天津 300300)
管制员超负荷工作会对扇区的运行安全构成极大威胁。空中交通管制复杂度(下文简称“管制复杂度”)度量了管制员工作负荷。如何科学建立管制复杂度与相关复杂因子之间的内在关系,已成为空中交通管制领域的一个研究难点。
基于影响空中交通复杂度的诸要素,研究学者们建立了多类复杂系统模型,并应用于负荷评估领域。Neal等[1]首次根据15个扇区复杂性指标,将多层次模型用于负荷预测,但其部分指标对管制员实际管制工作负荷的影响关系和程度并不明确;叶博嘉等[2]提出了基于距离与交叉冲突因素的两类复杂因子,建立了基于空中交通结构复杂性的模型,但其模型验证是基于雷达数据,不能够直观全面地反映实际管制工作状况;王红勇等[3]创新性地提出以接近度、接近率等为指标的基于扇区复杂度的负荷评估模型,考虑了航空器间复杂的非线性影响,但就实际管制情况而言,该方法缺少可操作性和可实现性;夏正洪[4]首次较为详细地介绍了由高校人员进行的雷达模拟机实验过程,并通过对管制指令的统计分析进行负荷评估,但缺少对管制员动作负荷及不可观测负荷的评估,其在实验流程的完整性和样本处理的可靠性方面存在不足。
由此可见,大多数管制负荷评估或预测研究都是以管制员指令或扇区复杂度[5]为指标,建立计算机仿真模型或数学模型。但各类模型在复杂性指标对管制员实际工作负荷的影响方面缺少可解释性,在将管制员的主观感受与客观指标的结合方面存在不足,不够贴合实际管制工作。事实上,从产生负荷的原因的角度可知,管制复杂度就表征了管制负荷的大小,两者之间为正相关关系。用管制复杂度作为评估对象,能够更加直观、准确、综合地体现管制员的工作负荷大小。
现从实际管制角度出发,用管制负荷达到管制员管制能力上限的程度来定义管制复杂度,并构建相关复杂因子体系;组织各难度级别下的多组模拟机实验[6],并进行实验视频和音频采集;邀请资深管制专家对每组实验的视频场景进行管制复杂度的定性评价,并利用MATLAB进行移动时间窗的数据处理,获得相应的复杂因子,从而得到相对应的样本集合;建立了基于BP(back propagation)神经网络的复杂因子与管制复杂度之间的非线性模型,并验证了模型预测精度。
1 空中交通管制复杂度分析
通常可将管制负荷分为可观测负荷和不可观测负荷。其中,可观测负荷指在管制工作过程中,能够被观察员统计和计时的工作,而不可观测负荷则指管制员在短时间内处理飞机信息的“心理能量”的水平,是管制员个人的主观感受或主观的认知理解。综合其他相关研究[7-11],可将影响管制员工作负荷种的主观因素总结为专业知识的熟练程度、工作经验、工作技巧、个人性格、心理素质、压力程度、疲劳程度等,这些主观因素制约了管制员的个人管制能力上限,即制约该扇区的最大管制负荷,但上述因素在实际管制工作中,是难以量化或由除管制员本人外的评估方进行客观评估。
针对主观因素不可量化的特点,本文提出了空中交通管制复杂度。定义第i个扇区管制负荷(Wi)与扇区管制负荷阈值(Mi)两者之间的比值为空中交通管制复杂度(φi),如式(1)所示:
(1)
式(1)中:Wi为扇区管制负荷;Wai为可观测负荷;Wbi为不可观测负荷;Mi为管制负荷阈值,表示第i个扇区的管制负荷上限。
通过模拟机实验,采用客观评定法以采集可观测负荷指标数据的同时,采用主观评定法得到管制员对管制复杂度的定性评估结果,该结果包含了管制员对自身主观因素,即不可观测负荷的全面考虑。故以管制复杂度作为评估目标的优势可总结如下。
(1)由管制负荷阈值(Mi)引入了管制员的个人主观评估标准,管制负荷阈值一定程度上表征了不可观测负荷的大小。
(2)在只需测定可观测负荷,而无需具体量化不可观测负荷的前提下,基于主客观相作用的复杂性,将可观测负荷与不可观测负荷都考虑在内,其结果更具科学性和可靠性。
基于此,为表征可观测负荷,可通过DEMATEL系统要素分析方法,使得复杂系统通过全面有效地分析决策后进一步精炼为简单结构[12]。管制工作的目的是根据雷达所显示的空中交通状况,通过管制指令使航空器达到某种飞行状态,根据工作任务可将管制员的管制工作分为监视管制工作、冲突处理工作和协调移交工作[13]。而雷达屏幕显示的飞行数据可直接反映出管制员的主要管制任务的客观复杂程度。参考相关研究并收集管制专家意见,建立扇区管制复杂度的客观影响因素体系,设有ω个影响因子,记为G=[g1,g2,…,gω]。参考DEMATEL方法的研究结果,扇区内航空器数量、航空器高度变化、扇区内冲突状况以及相邻扇区流量变化这4各因素的中心度均大于3,被确定为扇区管制复杂度的关键影响因素。
根据上述客观影响因素的具体定义,并考虑到模拟机实验数据采集的可操作性、可实现性及可靠性,将δτ(τ=1,2,3,4)个管制复杂度客观影响因素具体细分为χη(η=1,2,…,6)个可采集的复杂因子,如图1所示。

图1 空中交通管制复杂度的客观复杂因子
其中,服务架次(χ1)是指某段时间开始时,扇区内滞留航空器数量与往后这段时间内进入扇区的航空器数量之和。
2 管制模拟实验的设计与实施
2.1 实验扇区环境及人员配备
实验设备采用空中交通管制员雷达管制模拟训练系统。邀请贵州、甘肃空管分局的一线管制员及管制专家参与管制运行模拟实验,分别于兰州、贵阳进行。其中,兰州实验组对进近1扇、进近2扇、进近4扇、进近5扇、进近高扇和进近低扇进行了6组 实验;贵阳实验组对进近1扇、进近2扇、进近3扇、进近4扇进行了4 组实验。
每组模拟机的测试时长约3 h,需要两名负责管制席位的管制员,一名负责机长席位的管制员和两位管制专家参与实验。管制员级别对于实验的管制复杂度调查也存在一定影响,因此实验邀请了二至五级的管制员共50人,并对实验人员进行合理分组,使得每个扇区的管制工作由两名不同级别管制员轮换负责,每人各进行1.5 h的管制模拟实验,以保证数据可靠性和实验连续性。如图2(a)、图2(b)分别为兰州和贵阳的某一扇区模拟机管制实验场景,缩比尺为1∶650 000。

图2 管制模拟机实验场景图
2.2 实验任务
(1)实验采集设备。在整个模拟实验的过程中,每个扇区实验组需要架设1 台DV摄像机和2 个微型麦克,用以采集管制扇区的屏幕信息和管制员通话信息。
(2)训练计划编制。为使得样本范围覆盖全面,得到各管制复杂度级别下的实验数据,在编制训练计划时,遵循从简单到复杂的原则,保证场景采集的全面性。
(3)管制复杂度评分。负责管制席位的两位管制员及两位管制专家,通过实验参与及视频回放,对每组3 h的扇区实验,以10 min为间隔,1 h为时间片,分别对每个扇区的13 个时间片下的管制场景,以5%为单位进行管制员管制复杂度的人工主观评估。
3 管制模拟实验数据的处理分析
模拟机实验数据的处理主要分为两个部分,一是对管制员声音、动作负荷的统计,其目的是用于验证和校正专家及管制员对各场景下的管制复杂度评估分数,保证数据有效性;二是对各复杂因子的数据统计和分析,以获得BP神经网络模型的训练参数。
3.1 基于MATLAB的数据提取方法
为了改进以往完全人工的统计方式,增强数据可靠性和负荷可观性,本文实验的数据处理基于MATLAB平台,改进了基于管制模拟机的扇区管制负荷工具ATMworkload。
3.1.1 数据的初步处理
在实际管制工作中,管制员工作负荷主要体现在声音负荷和动作负荷两个方面。声音负荷是总工作负荷最主要的组成部分,通常以管制员发出指令时长(TC)和飞行员请求及复诵时长TP之和表征声音负荷(WV)的大小,如式(2)所示:
Wv=Tc+Tp
(2)
对所有通话声音文件进行一次性处理,形成1 s时间间隔的“0”“1”时间序列文件。“0”表示该秒无通话,通话0 s;“1”表示该秒有通话,通话1 s,并设置波形提取门限以剔除通话噪音。图3为其中一组实验声音文件处理得到的波形曲线。

图3 声音负荷波形
在雷达屏幕操作过程中,主要的操作项目包括鼠标操作,频道选择等。统计各个操作项目的总时间,作为雷达屏幕操作时间(TRS)用以表征动作负荷(Wm)的大小,如式(3)所示:
Wm=TRS
(3)
采用人工方法统计屏幕摄像数据包。观察每张图片显示的管制员有效操作动作,形成动作时间序列文件,将所有数据包合并后输出相应的动作时间序操作界面如图4所示。

图4 动作时间界面
3.1.2 数据的时间片处理
根据需要的时间片时间间隔长度,提取时间片时间序列数据。为采集样本的完整性和多样性,应在视频时间前后各增加1 h的统计时间,基于RLprocess软件,得到每个扇区的60 min时间片序列图,结果如图5~图8所示。
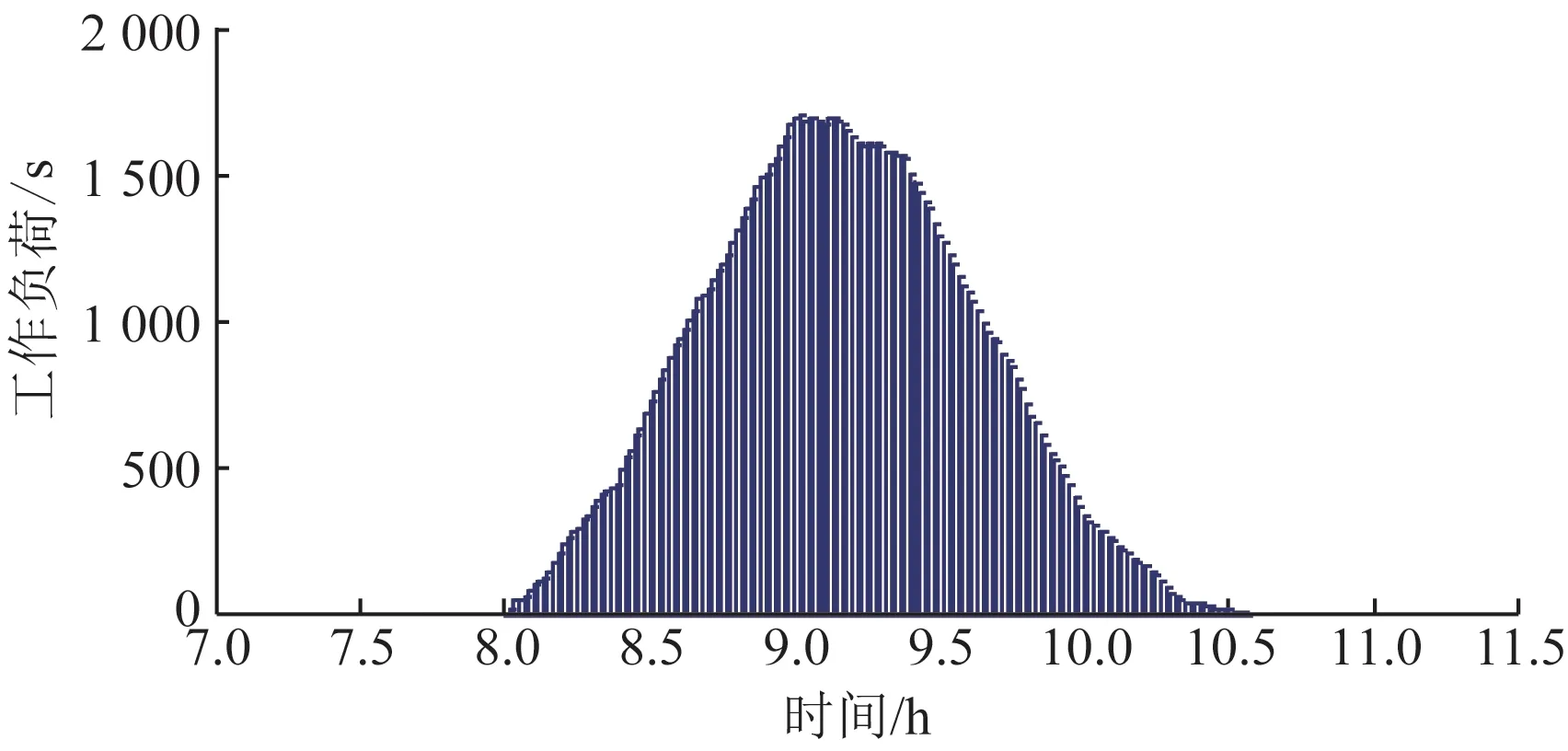
图5 声音工作负荷

图6 动作工作负荷

图7 进出扇区飞机数

图8 服务架次
3.2 管制复杂度评估分值有效性检验
如2.2节所述,模拟机实验共获得130 组管制复杂度评分值,每个扇区每轮实验的分值由专家1、专家2和管制员三方评分组成。为保证数据有效性,校正主观差异,需根据MATLAB处理出的声音、动作负荷,对管制复杂度的原始评分值进行有效性验证。
具体来讲,传统“DORATASK”方法认为以管制通话时间量化下的可观测负荷应占总负荷的一半以上,但该方法存在一定局限性,可加上鼠标点击雷达屏幕等动作的工作负荷,即以管制员在对扇区每架航空器所消耗总通话指令时间和总动作操作时间之和,来量化部分可观测的管制工作负荷,从而在可接受的误差范围内,以该和值来进行管制复杂度的有效性检验。根据参与模拟机实验的管制员及管制专家的反馈结果及以往相关研究[14]统计可知,声音动作工作负荷占总工作负荷的70%~80%,取3 600 s的70%作为声音动作小时负荷阈值,在可接受的误差范围±5%内,第i个实验场景中,管制员的声音动作负荷与管制复杂度之间的验证关系可总结如式(4)和式(5)所示:
αxi=[(Wvi+Wmi)](1+ξ)]/3 600,
25%≤ξ≤40%
(4)
式(4)中:Wvi为管制员的声音工作负荷;Wmi为管制员的动作工作负荷;αxi为第x位评估者对管制复杂度的评分;ξ为验证余度。
剔除不合格数据后,根据群决策中专家权重确定方法[15-16],随机选取本模拟机实验中的25个场景下,专家1、专家2、和管制员对管制复杂度的评分值,构成3个判断矩阵,综合主客观后计算的可信度权值为λ1=0.392 3;λ2=0.382 2;λ3=0.223 4。由此,可将每组实验场景专家1、专家2和管制员的三方评分a1i、a2i、a3i,按照下式加权计算得到管制复杂度的综合值φi,即为该场景的管制复杂度最终评分值。
φi=0.4a1i+0.4a2i+0.2a3i
(5)
3.3 实验数据分析
复杂因子(χη)的60 min时间片数据,一部分通过MATLAB软件处理得到,另一部分通过管制实验视频和录音的回放,人工统计得到。将其按照时间序列进行匹配,获得130 组样本数据,如表1所示。复杂因子(χ1~χ6)与管制复杂度的分布关系分别如图9(a)~图9(f)所示。

表1 样本数据汇总
由图9可以看出各复杂因子(χη)与管制复杂度(φi)之间并非是线性关系,从图9(a)中可知服务架次χ1与管制复杂度的总体变化趋势大致相似,但并非完全的线性关系,尤其在管制复杂度较大的场景中,服务架次与其的数学关系更不明显;从图9(e)中可看出扇区内冲突次数(χ5) 与管制复杂度为明显的非线性关系。因此,为进一步探究管制复杂度的复杂因子与管制复杂度之间的数学关系,考虑构建BP神经网络模型进行非线性拟合。

图9 各复杂因子与管制复杂度间的分布关系
4 基于BP神经网络的管制复杂度预测模型
4.1 管制复杂度模型构建
为更好地表征复杂因子与管制复杂度之间的关系,构建一个含输入层、隐含层、输出层的三层BP神经网络,进行非线性拟合[17-18]。
(1)为提高BP神经网络准确性,需要将所有的数据X都转化为[-1,1]之间的归一化后的数值Z,如式(6)所示:

(6)
式(6)中:X为未归一化后的数值;Xmin和Xmax为未归一化数据的最小值和最大值;Zmin为归一化之后的最小值,即为-1;Zmax归一化之后的最大值,即为1。
输入量为复杂因子χη(i=1,2,…,6),输出量是管制复杂度φi。给定输入层、隐含层、输出层之间的连接权值Ui0j0和Vj0k0,初始化输入层和输出层的阈值aj0和bk0。
(2)采用经验公式法确定隐含层节点数,公式主要有两种:

(7)
ρ=log2m0
(8)
式中:H为1~10之间的整数;m0为输入层节点数;n0为输出层节点数;ρ为隐含层节点数。
可得本模型的隐含层节点数范围为2~13。BP神经网络的传递函数选用非线性变换函数Sigmoid:

(9)
(3)计算隐含层输出值Oj0为

j0=1,2,…,ρ
(10)
式(10)中:Ui0j0为隐含层和输出层之间的连接权值。
(4)输出层输出值Yk0为

j0=1,2,…,ρ
(11)
式(11)中:Vj0k0为隐含层和输出层之间的连接权值。
(5)计算目标输出值误差ek0。
ek0=Zk0-Yk0,k0=1,2,…,n0
(12)
(6)根据误差更新连接权值Ui0j0和Vj0k0:

(13)
Vj0k0=Vj0k0+ηOj0ek0,i0=1,2,…,m0,
k0=1,2,…,n0,j0=1,2,…,p
(14)
式中:η为学习速率。
(7)根据误差更新阈值a′j0和b′k0:

(15)
b′k0=bk0+ek0,j0=1,2,…,ρ,
k0=1,2,…,n0
(16)
判断迭代是否结束,若没有结束,则返回第(3)步。
4.2 模型精度分析
随机选择100个训练样本建立BP神经网络模型,利用MATLAB对隐含层节点数,BP神经网络参数进行不断调试,得到当隐含层节点数为10时,经过824 次迭代网络收敛达到了预设精度,BP神经网络的建模完成。训练误差曲线如图10所示。

图10 BP神经网络均方误差曲线
另30 组数据组作为测试样本分析模型精度,将输出值进行反归一化处理,得到预测值。图11为真实值与预测值的对比图。从30 个测试样本的真实值与预测值的对比可以看到,真实值与预测值的走势是基本一致的,测试样本的真实值与预测值的拟合程度较高。
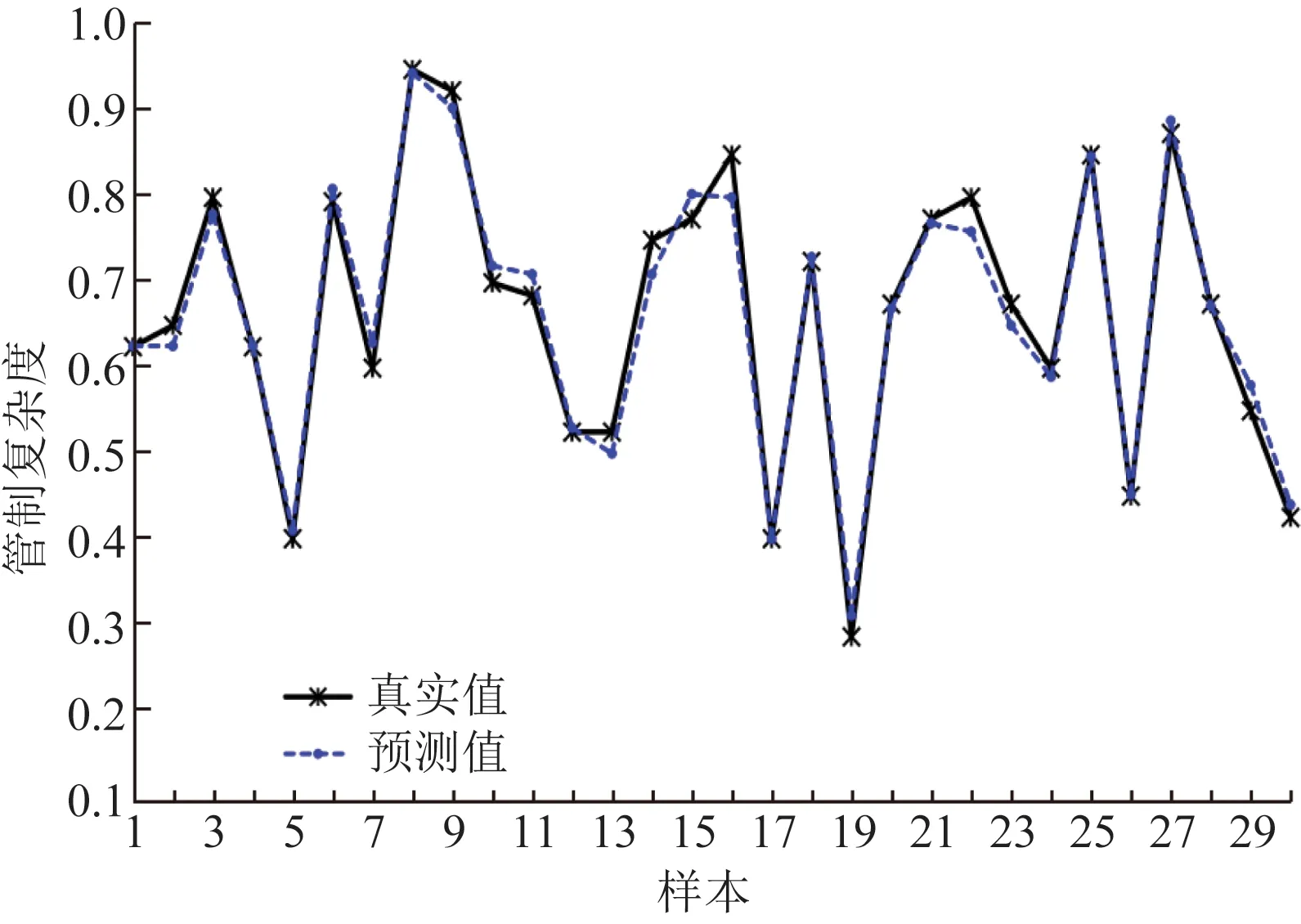
图11 测试样本真实值与预测值变化曲线
根据式(18)和式(19)计算每个样本的绝对误差EA与绝对百分误差ER。
EA=y*-y
(17)

(18)
式中:y*为预测值;y为真实值。
图12为真实值与预测值之间的绝对误差和绝对百分误差的分布。
由图12可知,30 个测试样本的绝对百分误差分布都在±10%,绝大部分样本的绝对百分误差在±5%之内。计算得到管制复杂度预测值偏离真实值的均值(平均绝对误差)为0.025,偏离程度(平均绝对百分误差)为3.75%。从对测试样本绝对误差和绝对百分误差的分析结果可以看出,建立的BP神经网络模型误差在预期范围之内,能够较准确地表征复杂因子与管制复杂度之间的关系。

图12 测试样本绝对误差和绝对百分误差分布图
5 总结
通过研究空中交通管制复杂度与相关复杂因子之间的映射关系,得到以下结论。
(1)从基本定义出发,基于主客观因素相互作用的复杂性,提出了空中交通管制复杂度作为评估对象,综合考虑了可观测负荷及不可观测负荷对管制员工作带来的影响。
(2)在科学合理的实验设计下,以大量的管制模拟机实验和完整的数据统计为基础,建立的基于BP神经网络的空中交通管制复杂度预测模型更贴合实际管制工作,从而在客观物理量与管制员的主观感受之间建立了可靠联系。
(3)本文研究为空域规划管理提供了科学的理论支持,对降低扇区运行风险和保障飞行安全具有重要意义。
(4)未来可考虑采用管制员在相关仿真软件中进行实时操作指挥的方法,利用软件统计提高处理实验数据的效率。
