梳齿-气吸式花椒采摘机设计与试验
2021-08-11万芳新孙浩博李声元赵永彪黄晓鹏
万芳新,孙浩博,蒲 军,李声元,赵永彪,黄晓鹏
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
花椒属落叶灌木或小乔木,是一种顶生小型林果,为我国广泛种植的一种特色辛香料和中药材,其果皮可作为调味料,并能提取芳香油,又可入药,种子可食用,也可加工制作肥皂。我国花椒种植面积约175万hm2,年产花椒25~45万t,年产值32亿元,且种植面积每年以20%~30%的速度增加。甘肃武都、陇南地区是花椒的主要产区,近年来,随着农业结构调整,花椒产业有较大的发展[1-2]。由于花椒树枝伸展长、带刺以及果实小而致使人工采摘困难,同时花椒采摘要求既要不伤叶、芽、枝,又要适时收获,因此导致花椒机械采收十分困难,目前花椒仍然以人工采收为主[3]。
目前对顶生小果实的采摘以梳刷采收、振动采收和气吸采收为主[4-12]。张文强等[13]设计并优化了一种变间距梳刷式枸杞采收装置,实现了枸杞与枝条的脱离以及枸杞与梳刷指分离,但采净率低,对果实损伤大。王海滨等[14]设计了一种基于槽型凸轮传动的蓝莓采摘机,改进了传统振动采摘机械的传动机构,实现了预定运动轨迹改善采摘系统工作性能,在一定程度上提高了采摘机的采摘效率。姬长英等[15]设计了一种梳割气吸一体式贡菊采摘机实现了花朵分期采摘、及时采摘、完整采摘的要求。曹卫彬等[16]通过对梳夹式红花采收机高限位装置进行参数优化,提高了采净率,同时降低了花球损伤率。郭艳玲等[17]设计了一种蓝莓采摘实验台,对蓝莓植株振动响应进行了研究,得出了蓝莓振动采摘最佳拍打频率和采摘机最佳行进速度。高自成等[18]设计了一种具有可避让式采摘头、多自由度采摘臂的齿梳式油茶果采摘机,验证了齿梳式油茶果采摘机的可行性,但在实验中存在果实损伤率高的问题。杨萍等[19]采用K-means、Otsu与K-means算法对花椒果实目标进行提取并识别花椒的结果母枝,利用结果母枝的深度数据确定采摘点在图像中的坐标,最终通过坐标转换得到结果母枝上花椒采摘点的三维坐标,为花椒采摘机器人提供技术支持。张永梅等[20]利用HSV和 RGB两种颜色空间模型对成熟期花椒图像阈值分割,识别出花椒果实区域,利用合惯性主轴并结合形心偏差法对采摘点进行定位,确定了机械采摘点,为开发剪刀式采摘机器人提供支持。Ferreira等[21]研究了不同外力作用的草莓机械损伤程度与其在收获时期冷却手段及果实温度的关系,发现随果实温度的降低,比起静重载荷作用,草莓更易受到冲击载荷作用而产生损伤。Everett等[22]研究了采后梨皮细胞的损伤,认为机械损伤是主要原因之一。Van Zeebroeck等[23-24]通过对水果收获中的冲击损伤进行了仿真,得出水果损伤与受力的关系,并且认为苹果的硬度与其机械损伤正相关,而曲率半径对其损伤程度的影响视碰撞强度而定。目前国内外对花椒的机械化采摘研究较少,如何通过理论研究,确定一种适宜于花椒的低损伤采收方法,仍是一个亟待解决的难题。
梳刷-气息式花椒采摘机通过梳齿作用实现花椒果实和枝杆的分离,利用轴流式风机产生的流场运输和清选花椒果实。本文通过对采摘头的理论分析并结合实验,完成采收装置的参数优化,获得了较高的果实采净率、采收净度,同时降低了损伤率,为花椒采摘机的研制和设计提供理论基础。
1 整机结构与工作原理
1.1 整机结构
整机结构如图1、2所示,主要由行走装置、汽油发电机、收集装置、采摘装置、轴流式风机及与轴流式风机相连接的筛网等组成。其中收集装置由输送管、导向板、收集盒、支架组成。采摘装置由采摘盒、轴承座、齿梳式采摘头、联轴器、微型电机、伸缩杆组成。
1.2 工作原理
工作时,启动轴流式风机,使得收集装置形成负压,为花椒颗粒的输送做好准备,同时起到辅助采收的作用。微型电机带动梳齿式刀片旋转,将采摘装置移至花椒果实串处,对花椒果梗部位进行牵拉、剪切采收,掉落的花椒进入采摘盒里,经输送管通过轴流式风机产生的负压作用,经弧形筛板的作用掉落到收集箱里,连续作业一段时间后可将收集箱(有活动抽斗)中收集到的花椒粒取出装入收集袋中(图1、2)。
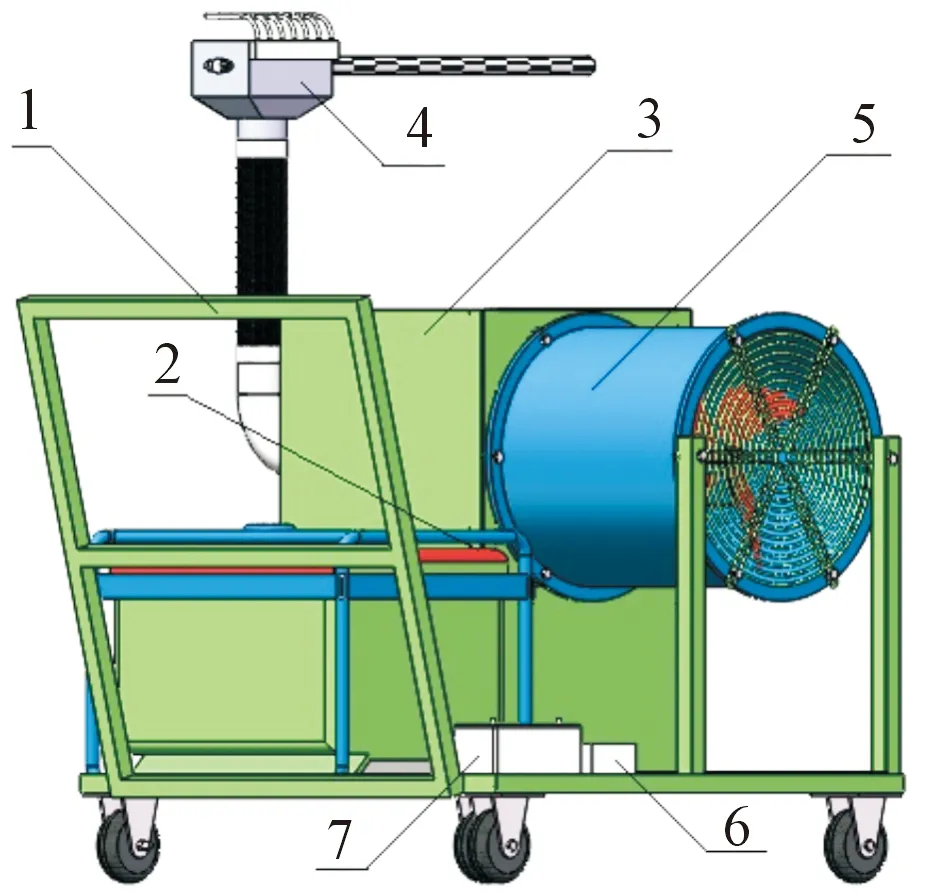
1.行走装置;2.汽油发电机;3.收集装置;4.采摘装置;5.轴流式风机;6.变频器;7.电瓶1. Walking device; 2. Gasoline generator; 3. Collection device;4. Picking device; 5. Axial flow fan; 6. Inverter; 7. Battery图1 气吸式花椒采收机整机结构Fig.1 The overall structure of air-suction pepper extractor
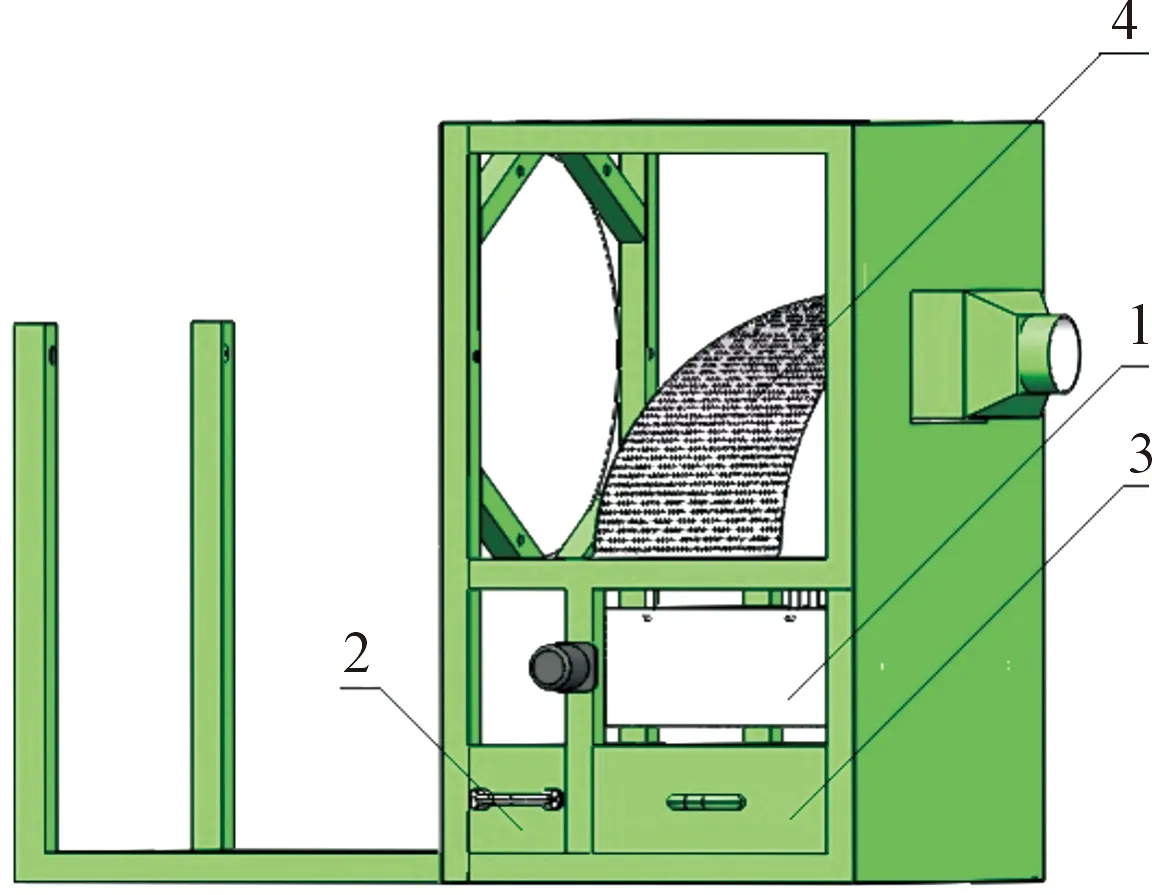
1.筛选盒;2.收集盒a;3.收集盒b;4.弧形筛网1. Screening box; 2. Collection box a;3. Collection box b; 4. Arc screen图2 气吸式花椒采收机内部结构Fig.2 Internal structure of air-suction pepper extractor
根据采摘的花椒品种与花椒粒果梗连接力的不同,可以通过变频器来进行调节采摘头转速,来控制刀片对果梗的作用力。
2 关键机构设计
2.1 梳齿式采摘装置的设计
针对花椒顶生成串这一特性,采摘头采用疏齿式,由滚筒轴和垂直于轴圆周面的4个梳齿型刀片组成,梳齿形刀片的整体宽度为150 mm,梳齿形刀片的板材厚度为1 mm,分别固定在与微型电机相连接的轴上,为在采摘过程中刀片可以更好地接触花椒串,根据花椒串、花椒粒以及花椒果梗的尺寸对梳齿的各项参数进行设计。
经试验测量花椒串的尺寸一般为30~40 mm。确定梳齿折弯角为120°,齿数初步定为9个,齿形板单个齿形的夹角为30°~35°(花椒粒的直径为3.5~5.0 mm);为了防止剪切过程中花椒串不被全部喂入梳齿形刀片的开口内,梳齿开口深度为20 mm(花椒串的尺寸为30~40 mm);并在齿缝折弯角的内侧开出了刃角为45°平行刀刃,避免了采摘过程花椒粒与果梗连接位置的断裂,刃口上端面采用倒圆角设计,减少采摘过程中尖锐刃口对花椒粒碰撞产生的破损,梳齿刀片局部放大图如图3、图4。
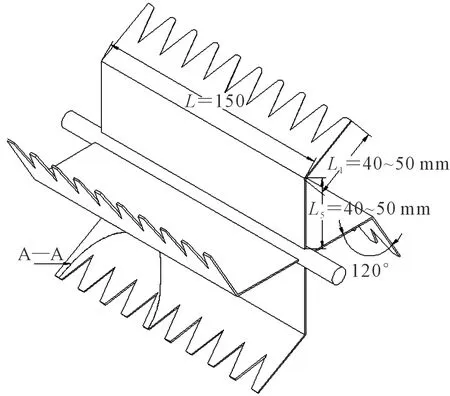
图3 采摘头结构示意图Fig.3 Structure of the picking head

图4 梳齿刀片放大图Fig.4 Enlarged view of comb blade
采摘作业时,梳齿型刀片向花椒串旋转,连接花椒串的枝条和长有花椒果实的果梗进入相邻的梳齿之间,梳齿刀片将2 mm(常见花椒果梗的直径为0.7~1.2 mm)以内的花椒枝条和长有花椒果实的果梗引导至梳齿缝内,当采摘头转动到一定位置时,将带有花椒粒的果梗在齿刃剪切、梳刷、牵拉的作用下与花椒粒分离,而齿缝内的枝条自动滑离出去。通过以上设计经采摘头梳刷掉落的花椒粒上还留有花椒梗,能够满足花椒采摘的农艺要求。
梳齿采摘头整体结构如图5所示。

1.手柄;2.微型电机;3.联轴器;4.梳齿1. handle; 2. micro motor; 3. coupling; 4. comb teeth图5 梳齿式采摘装置结构Fig.5 Comb-type picking device structure
2.2 轴流式风机的选定
风机流量用公式(1)计算:
(1)
式中,qv为风机流量(L·min-1),vg为轴流式风机每转的排量(cm3),n为风机转速(r·min-1),v为容积效率(%)。
(2)
式中,T为扭矩(N·m),p为压差(Pa),mh为机械容积效率(%)。
(3)
式中,P为风机功率(kW),t为总效率(%)。
为了使轴流式风机产生的气流能够充分地将在输送管中的花椒粒输送,则必须使花椒串所受气力大于花椒串重力,简化计算满足式(4)。
(4)
式中,r1为输送管直径(mm),ρ为花椒粒密度(g·mm-3),p为花椒粒所受的压差(Pa)。
查阅资料可得花椒的输送气流速度可选定为v1=30 m·s-1[25],结合输送管直径,可确定输送管中气流流量为:
(5)
式中,v1为输送气流速度(m·s-1);qp为输送管中气流流量(L·min-1)。
由式(4)可得p=1920 Pa,由式(5)可得轴流式风机的流量为6.17 m3·min-1(理想状态);由式(3)可得轴流式风机的功率为1.44 kW。
为满足使用要求,轴流式风机所用电机选用Y2-90S-2[26],其额定转速选定为2 840 rmp,额定功率为1.5 kW。
为了降低生产成本与保证质量,选用市场已有的轴流式风机,其具体型号是:SFG4-2R,功率为1.5 kW,转速为2 800 r·min-1时,全压可达380 Pa,其额定值均大于上述计算得出的轴流式风机的流量,为36.17 m3·min-1。考虑到实际生产中对流量有不同的要求,因此风机流速初步确定为20~40 m·s-1。
3 采摘装置的流场分析
采摘头在旋转过程中梳齿形刀片带动周围的空气绕其轴作环流运动,采摘头不同部位的流场分布也不相同,现对不同区域的流场具体分析。
3.1 梳齿形刀片三角形区域内的流场变化
由图4可知,采摘头梳齿形刀片的顶部形状为三角形,其梳齿内区的气流场主要是因为梳齿边缘的高速运动产生的。由于流体的附着作用,梳齿高速旋转时与梳齿口侧面直接接触的薄层流体与梳齿口具有相同的表面速度,这层流体在空气粘性力的作用下带动相邻层空气,同时由于惯性作用,远离物体接触面侧空气的速度低于靠近物体接触面侧,其气流速度出现速度梯度,如图6所示。利用微分理论,可将三角形的环流场内沿径向气流速度的分布,分成高度为dR的微量梯形面积,则可得出此微量梯形面积内的气流运动方程:
(6)
式中,L为梳齿形刀片刃口开口幅宽总和(m),v为梳齿边缘速度(m·s-1),T为齿形板单个齿形的夹角的半角(°),R为刃口底部距离刀片旋转中心的距离(mm),ω为梳齿角速度(rad·s-1)。
微量梯形面积:
(7)
式中,A为齿形区的微量梯形面积(mm2),h为刃口底部距离坐标原点的距离(m)。
由气体的体积流量与气流的速度之间的关系式:
(8)
式中,Q为气体的体积流量(L·min-1),W为气流速度(m·s-1)。
Q∝L×v
(9)
则可得出某一半径的气流速度的关系式:
(10)
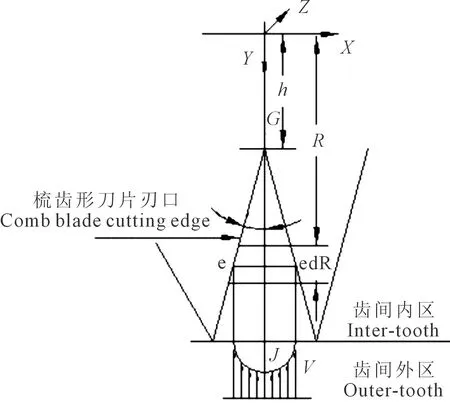
图6 刀片三角形空间的齿间气流速度分析Fig.6 Analysis of inter-tooth air velocityin blade triangular space
由图3可知,当dR→0时,可得出ee线上的速度分布,式可化简为:
(11)
在本次设计中(11)式中ω、h、T为定量参数,由此可得出,某一半径的气流速度仅与距离刀片旋转中心的半径呈反比,采摘头处环流的速度从齿尖开始往轴心移动时速度逐渐增大,且距离刀片旋转中心越小加速越快,气流对花椒粒作用力的变化越大,花椒粒距离刀片越近时发生碰撞后破裂越严重,刀片的旋转轴直径不应过小,从而可有效降低花椒的破损率。
3.2 采摘头旋转时无采摘盒齿间外区域的流场分析
根据已有的研究可知[27],当采摘头旋转时,在齿间外区采摘头带动周围的气体做旋流运动,形成以采摘头轴心为中心的环形流场,采摘头周围气体流动方向与极半径相垂直,气流速度基本上按双曲线规律随半径(r)的增大而减小,此旋流运动为无旋运动,其势函数和流函数分别为[28]:
(12)
式中,H为等势高,T为极角,r为气体旋流半径,Γ为气流环量。
(13)
式中,j为气流函数。
其旋流运动的流线是以原点为中心的同心圆(如图7),等势线是以原点为起点的辐射线,符合伯努利方程的使用条件[29],其求得的压力为:
(14)

图7 旋流运动Fig.7 Swirl movement

(15)

由(15)式可知,压力(p)是关于流场半径(r)的增函数,可见流场压力沿流场半径方向递增,花椒果实在梳齿作用下从结果枝脱落,脱落的花椒果实位于梳齿边缘流场压力较大处,由于齿梳中心压力小于边缘处,花椒果实在压差力作用下向梳齿里侧运动,即采摘头在旋转时产生负压对花椒有吸附导向作用。
4 试验研究
4.1 材料与方法
4.1.1 材料 所选材料采自甘肃省临夏州积石山县大河架乡农户种植的花椒,品种为大红袍和刺椒。根据试验需要,分别选出无损伤、直径为4.9~5.8 mm的大红袍果实100个,直径为4.0~4.8 mm的刺椒果实100粒,在采后第2天和购买当日进行试验。试验于2016年8月进行。
4.1.2 试验方法 采用三因素五水平二次回归正交旋转中心组合优化试验方法。以采摘头转速(x1),气流速度(x2),梳齿式刀片刃口角(x3)为影响因素,以采净率(y1),损伤率(y2)以及采收净度(y3)为目标函数,共实施20组试验。应用Design-Expert 8.0.6进行数据处理分析。根据前期试验确定各个水平因素,因素水平编码如表1所示,分别以3次重复的均值为测试结果。

图8 实验室试验图Fig.8 Laboratory test diagram
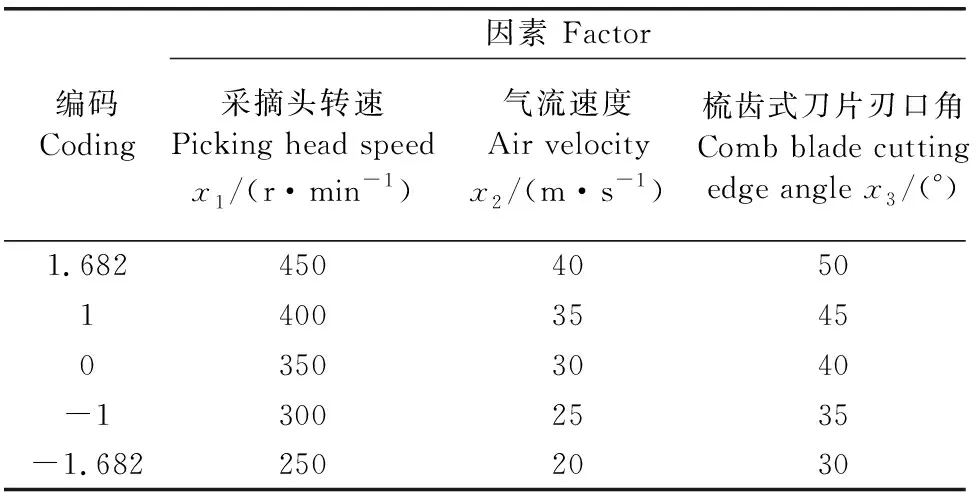
编码Coding因素 Factor采摘头转速Picking head speedx1/(r·min-1)气流速度Air velocityx2/(m·s-1)梳齿式刀片刃口角Comb blade cuttingedge angle x3/(°)1.68245040501400354503503040-13002535-1.6822502030
4.1.3 试验指标
(1)采净率:花椒采收试验中,采收的花椒果实质量占总花椒果实质量的比率。
(11)
式中,y1为采净率(%),n1为采收的花椒果实质量(g),n2为未采收净的花椒果实质量(g)。
(2)损伤率:在花椒采收试验中,采收的花椒果实中破损的质量与采收的花椒总质量的比值。
(12)
式中,y2为损伤率(%),n3为采收的花椒果实中完好果实的质量(g),n4为采收的花椒果实中破损果实的质量(g)。
(3)采收净度(为后续参数优化分析方便,含杂率用采收净度间接表示,即采收净度=1-含杂率):在花椒采收试验中,采收的花椒果实质量与采收混合物(包括杂质)质量的比值。
(13)
式中,y3为采收净度(%),n5为采收的花椒果实质量(g),n6为采收杂物的质量(g)。
4.2 结果与分析
4.2.1 试验结果与回归模型 结果如表2所示,通过 Design-Expert 6.0.10 软件进行方差分析,得到分别以采净率(y1),损伤率(y2)以及采收净度(y3)为响应函数,以各影响因素为自变量的编码回归数学模型。
y1=92.33+1.89x1+0.60x2+0.93x3
-0.44x1x2+0.86x1x+0.89x2x3
(14)
y2=1.58-0.24x1-0.12x2-0.11x3
-0.047x1x2+0.088x1x3
(15)

表2 试验方案与试验结果
y3=92.49+1.90x1+1.55x2+0.95x3
-0.92x1x2-0.1x1x3
(16)
方差分析结果表明模型处于显著水平,没有不可控制的因子干扰试验,该模型可以用来确定各因素对采收效果各性能指标影响规律。
4.2.2 采净率响应曲面分析 图9为不同因素对采净率的响应曲面。由图9(a)知,随着采摘头转速增加,采净率先略微升高,随后急剧降低,而随着气流速度的增加,采净率先是升高,达到一定值后变化不大。是由于采摘头随着转速增加,梳齿式刀片的剪切和牵拉作用增强,可以提高采净率,但是过快的速度会降低有效的作用时间,反而影响到采净率;而气流速度升高,可以更好地保证花椒果实在稳定的状态下被采摘头采摘,采净率随之升高,但当升高到一定值后,此作用影响不会继续起大的作用。当采摘头转速达到300 r·min-1、气流速度达到30 m·s-1左右时,采净率可达到最大值。
由图9(b)可知,随着采摘头转速增加,采净率先升高后降低,随着梳齿式刃口角的增加,采净率也是先升高后降低。这是由于刃口角增加,其对花椒果实的滑切作用逐渐增大,可使采摘头有效采收果实,但当刃口角过高时,果实不能有效牵引切割果实,将果实直接推出刀片,使采净率下降;当采摘头转速达到400 r·min-1、梳齿式刀片刃口角达到35°左右时,采净率可达到最大值。
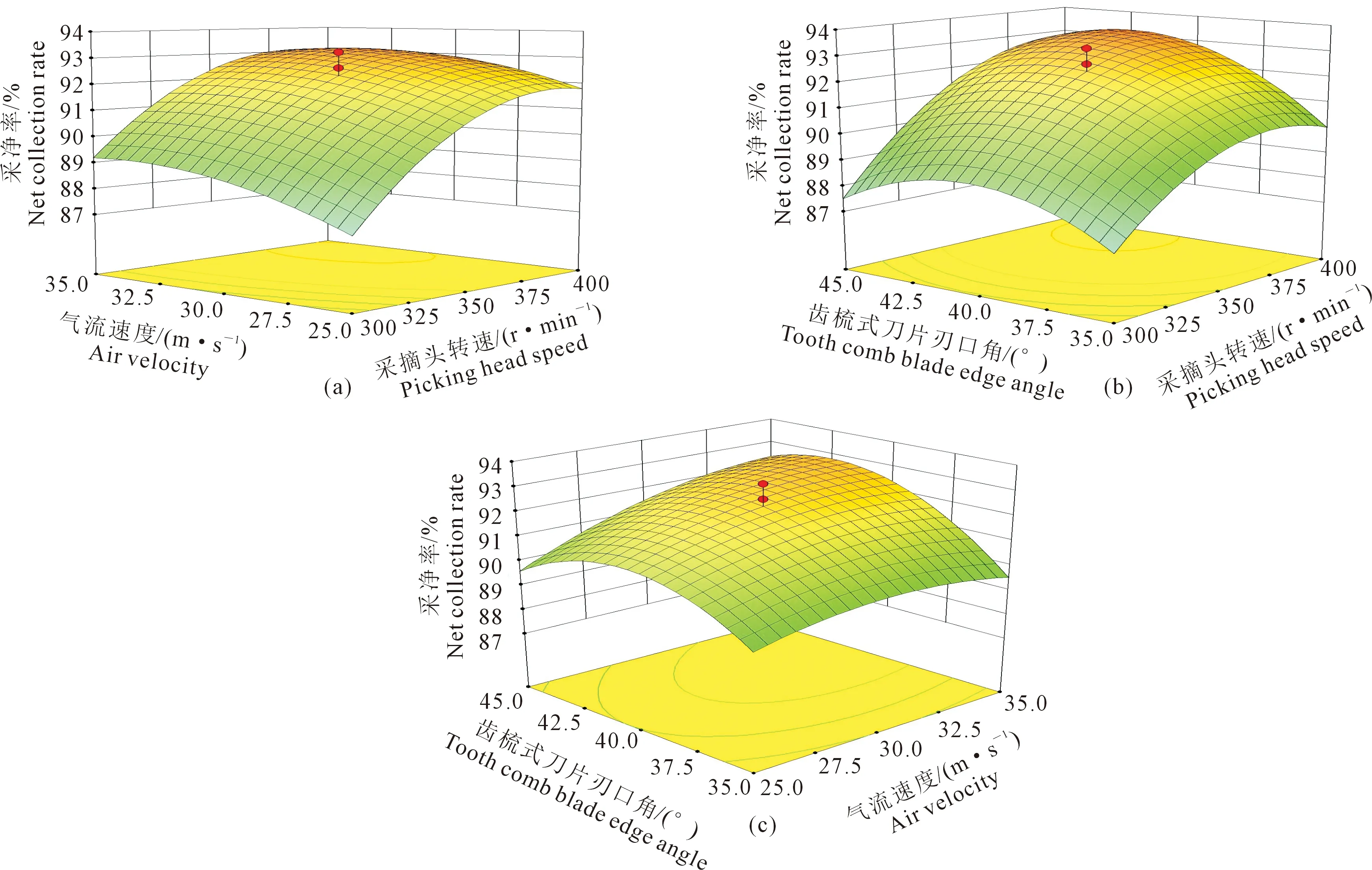
图9 各因素对采净率的响应曲面Fig.9 Response surface of each factor to recovery ratio
由图9(c)可知,随着气流速度增加,采净率先基本呈线性增加,但变化幅度很小。可见在采摘头转速固定于较好的水平时,气流速度及其与梳齿式刀片刃口角的交互作用对采净率的影响不大。梳齿式刀片刃口角对采净率的影响与9(b)趋势相同,只是变化幅度略小。
4.2.3 花椒果实损伤率响应曲面分析 图10为不同因素对损伤率的响应曲面。由图10(a)可知,随着采摘头转速的升高,损伤率先减小后增大,且变化较为明显。这主要是因为转速较低时,花椒枝条与采摘头的接触时间较长,同时枝条的反作用力也起到支撑作用,加大了采摘头对果实的剪切损伤,而速度过高时,冲击损伤、碰撞损伤将直接升高损伤率。气流速度对损伤率的影响也是先减小,后增大。可能是因为气流速度小时,不能有效引导牵拉果实,导致受到采摘头反复力,使损伤率上升,而过高气流速度会加大采摘头与果实间的相对作用力,虽然在一定程度上可能会提高采净率,但同时也会使损伤率升高。
由图10(b)可知,在适宜的气流速度下,随着采摘头转速的增加,损伤率基本呈线性增加,而梳齿式刀片刃口角对损伤率的影响在采摘头转速不同时变化较大,在采摘头转速较低时,随着刃口角增大,损伤率先减小后增大,而在采摘头转速较大时,随着刃口角增大,损伤率变化不大,但总体高于采摘头转速较低时的水平。
由图10(c)可知,随着梳齿式刀片刃口角和气流速度增加,损伤率先减小后增大,但总体变化不是非常明显。在气流速度达到35 m·s-1、梳齿式刀片刃口角达到35°附近时,损伤率率可获最小值。

图10 各因素对损伤率影响的响应曲面Fig.10 Response surface of various factors on damage rate
4.2.4 采收净度响应曲面分析 图11为不同因素对采收净度的响应曲面。由图11(a)可知,当采摘头转速大于350 r·min-1,采收净度急剧下降,主要是因为花椒树叶的连接力小于果实的连接力,过高的速度产生的惯性力可将大量的树叶摘下,从而导致采收净度下降。气流速度的影响趋势与此相同,气流速度的增加产生气流作用力,虽然不足以将果实摘下,但对于连接力较小的树叶的作用比较明显。
由图11(b)可知,随着梳齿式刀片刃口角的增加,采收净度略有下降,但变化幅度较小,只有在采摘头转速较高时刃口角变化对采收净度的影响才较为突出。这主要是因为刃口角较小时,果实与枝叶容易穿过刃口间的空隙,出现无效切割,而刃口角大时,刀片与果实的接触面积增大,在采摘头转速较高时对枝叶的作用很容易使其脱离。
由图11(c)可知,在气流速度较高时,随着梳齿式刀片刃口角的增大,采收净度呈线性规律下降,主要是因为过高的气流速度对花椒枝条起了有效的引导固定作用,从而增加了采摘头的有效作用时间,而较大的刃口角不一定能在此条件下脱下花椒果实,但通过冲击作用则有更大的几率将树叶摘下,导致采收净度下降。
图11 各因素对采收净度影响的响应曲面Fig.11 Response surface of each factor to the influence of recovery net
5 参数优化
为得到最佳的试验因素水平,对试验因素进行参数优化,建立参数优化数学模型。结合试验因素的边界条件,对得出的采净率、损伤率以及采收净度的回归方程进行分析,得到非线性规划的数学模型:
maxy1或miny2或maxy3
y1=92.33+1.89x1+0.60x2+0.93x3-0.44x1x2
y2=1.58-0.24x1-0.12x2-0.11x3-0.047x1x2
y3=92.49+1.90x1+1.55x2+0.95x3-0.92x1x2
250≤x1≤450
20≤x2≤40
30≤x3≤50
0≤[y1(x1,x2,x3)或y2(x1,x2,x3)或y3(x1,x2,x3)]≤1
利用Matlab对上述模型编程计算,得到采净率、损伤率以及采收净度的优化结果:采摘头转速367.5 r·min-1,气流速度32.7 m·s-1,梳齿式刀片刃口角31.5°。在此参数组合下,获得最优的采收效果为:采净率95.2%,损伤率1.2%,采收净度96.5%(即含杂率3.5%)。
6 验证实验
结合加工工艺及成本等因素,根据上述优化结果加工齿梳刃口角为32°,调整风机流速30 m·s-1,采摘头转速为350 r·min-1。2019年8月课题组在甘肃农业大学花椒种植园进行采摘实验(图12),采摘后统计采净率、损伤率、采收净度,结果如表3所示。

图12 花椒采摘机作业图Fig.12 Operation diagram of pepper harvester
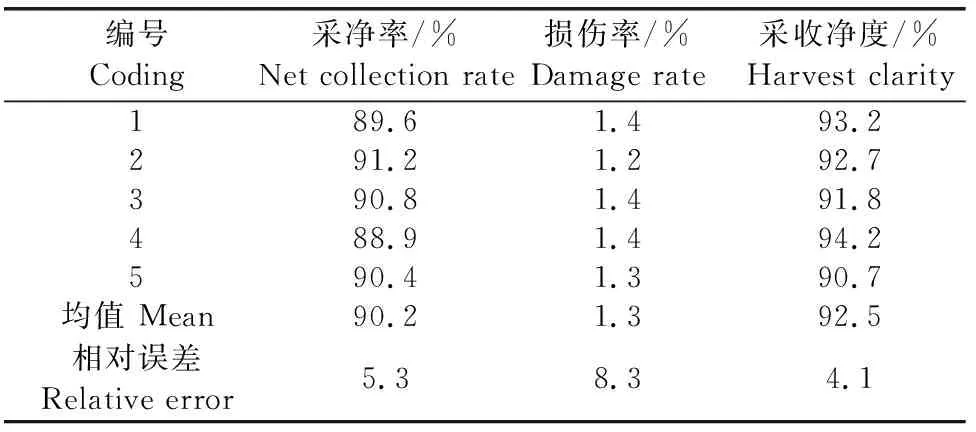
表3 验证实验结果
验证实验得采净率91.8%,相对误差5.3%;采收净度92.5%,相对误差4.1%;损伤率1.3%,相对误差8.3%,达到良好的采收效果,优化结果符合设计要求。
7 结 论
1)设计梳齿-气吸式花椒采收机并对采摘头附近流场进行理论分析,得出采摘头附近压力(P)是关于流场半径(r)的增函数,采摘头流场对脱落花椒起到吸附导向作用。
2)针对自行研制的梳齿-气吸式花椒采收机,以采净率、损伤率、清选净度(1-含杂率)为试验指标,基于Box-Behnken试验设计原理,通过三因素五水平响应曲面分析,建立了各试验指标与采摘头转速、气流速度、梳齿式刀片刃口角变化关系的数学模型。该模型可以用来确定各因素对采收效果各性能指标影响规律。
3)对各试验指标回归方程进行分析,得到非线性数学模型,进行参数优化,获得了最优参数组合:采摘头转速367.5 r·min-1,气流速度32.7 m·s-1,梳齿式刀片刃口角31.5°。在此参数组合下,获得最优的采收效果为:采净率95.2%,损伤率1.2%,采收净度94.7%。加工齿梳刃口角为32°,调整风机流速30 m·s-1,采摘头转速为350 r·min-1,进行验证实验,得到采净率91.8%,相对误差5.3%,采收净度92.5%,相对误差4.1%,损伤率1.3%,相对误差8.3%,符合设计需求。