低速水下航行器惯性调节系统的建模仿真
2021-08-11唐熊辉李玉生秦子明杨玉婉谢超杰
唐熊辉,李玉生,秦子明,杨玉婉,谢超杰
(1.海军装备部沈阳局驻葫芦岛地区军事代表室,辽宁 葫芦岛 125004;2.武汉第二船舶设计研究所,湖北武汉 430205;3.华中师范大学,湖北 武汉 430079;4.武汉理工大学 汽车工程学院,湖北 武汉 430070)
0 引 言
水下航行器得到了越来越多的应用。此类航行器在水下工作时,运动速度较低,导致其舵效很低[1],这就需要依靠其他的惯性调节系统来调节其运动姿态,因此,水下航行器,尤其是大型的水下航行器,一般都设计有多个压载水舱以及对应的压载水系统控制方案。压载水系统是低速水下航行器调整运动姿态的重要装置,作为一个惯性调节系统,它根据传感器监测到的航行器实时运动状态,发出相应指令,由压载水系统控制水舱注、排水以改变自身质量、质心位置,将惯性力与力矩作用于航行器来实现航行器位置和姿态的调整[2–5]。
传统方式下的低速水下航行器运动姿态惯性调节系统的设计过程费时费力,需要大量投入,故开发相关的参数化软件非常重要,能够在系统方案的早期设计阶段对不同的航行器运动姿态调节系统进行快速评估[6]。针对当前相应软件的开发比较分散、不够系统化的背景,本文采用多领域建模的方法,建立水下航行器六自由度运动模型以及惯性调节系统中水、气、控制器动力学模型,实现了航行器空间运动与其惯性调 节系统的耦合动力学联合仿真。
1 水下航行器六自由度运动模型的建立
1.1 水下航行器六自由度运动方程
水下航行器运动过程中的2 种坐标系(固定坐标系和运动坐标系),如图1 所示。
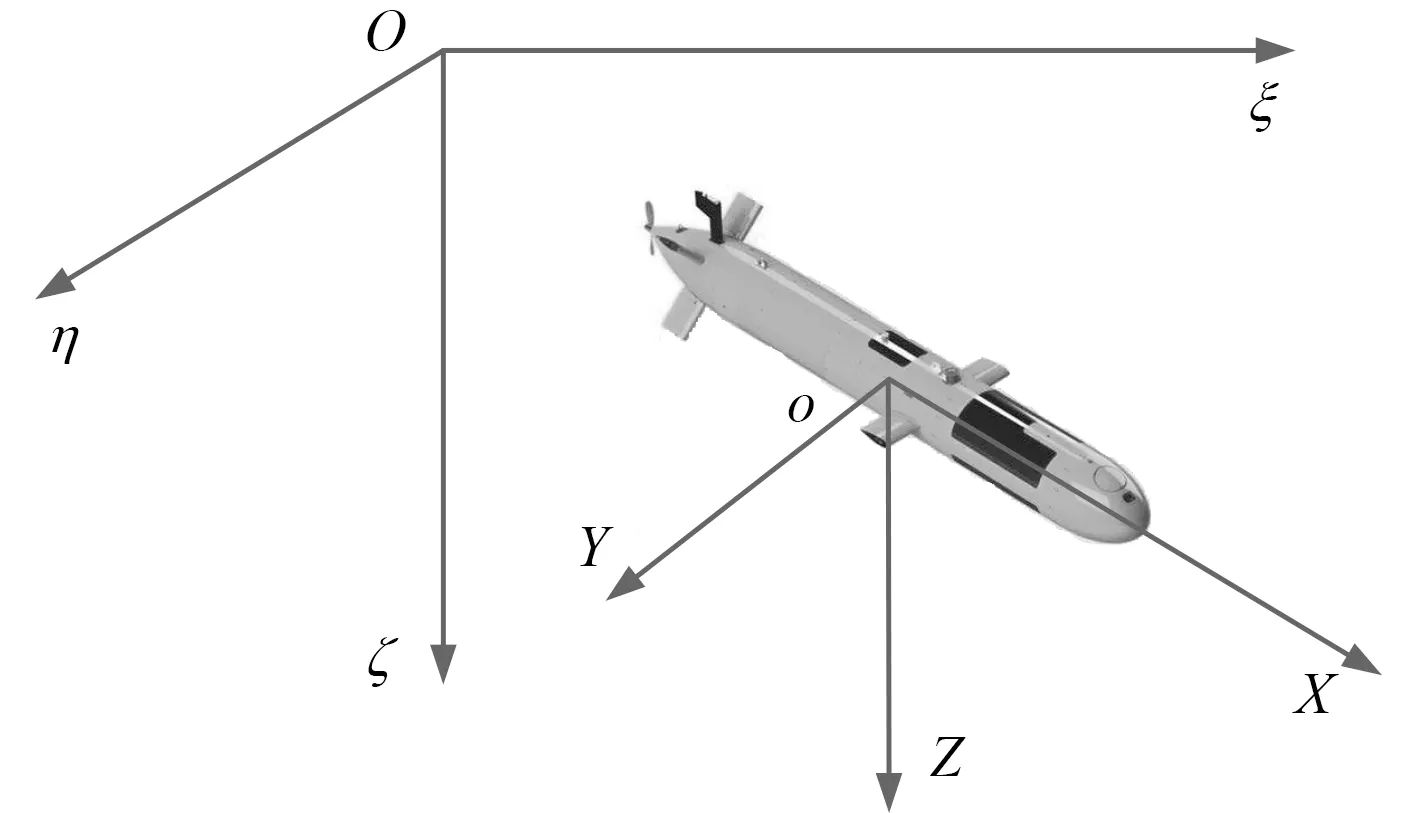
图1 两种运动坐标系Fig.1 Two kinds of movement coordinates
固定坐标系固结在地球表面上,其不随时间和航行器运动而变化。通常取t=0 时刻,航行器质心所在的位置为固定坐标系的原点E,ξ轴取在静水平面内,正方向为航行器总体的运动方向;将 ξ轴在静水平面内沿顺时针方向旋转 90°,即是 η轴正方向,ς正方向指向地心。运动坐标系中,航行器的运动通常用艏摇角ψ、横倾角φ、纵倾角θ和质心位置XG,YG,ZG来表征。同时规定:ψ向右转为正、φ向右倾为正、θ向尾倾为正。
水下航行器的运动可以用在运动坐标系中的速度向量u,v,w和角速度向量p,q,r来表示,也可以用固定坐标系中位置向量的导数和姿态向量的导数来表示。船舶运动的过程中将会受到船体、螺旋桨、舵等船体本身主控制力和附属控制力、流体动力、外力等影响。
在上述坐标系定义下的水下航行器六自由度运动方程如下[7–8]:
轴向方程
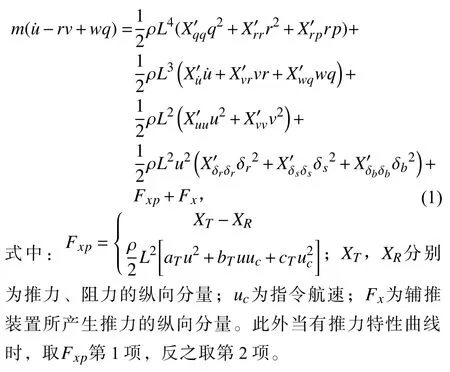
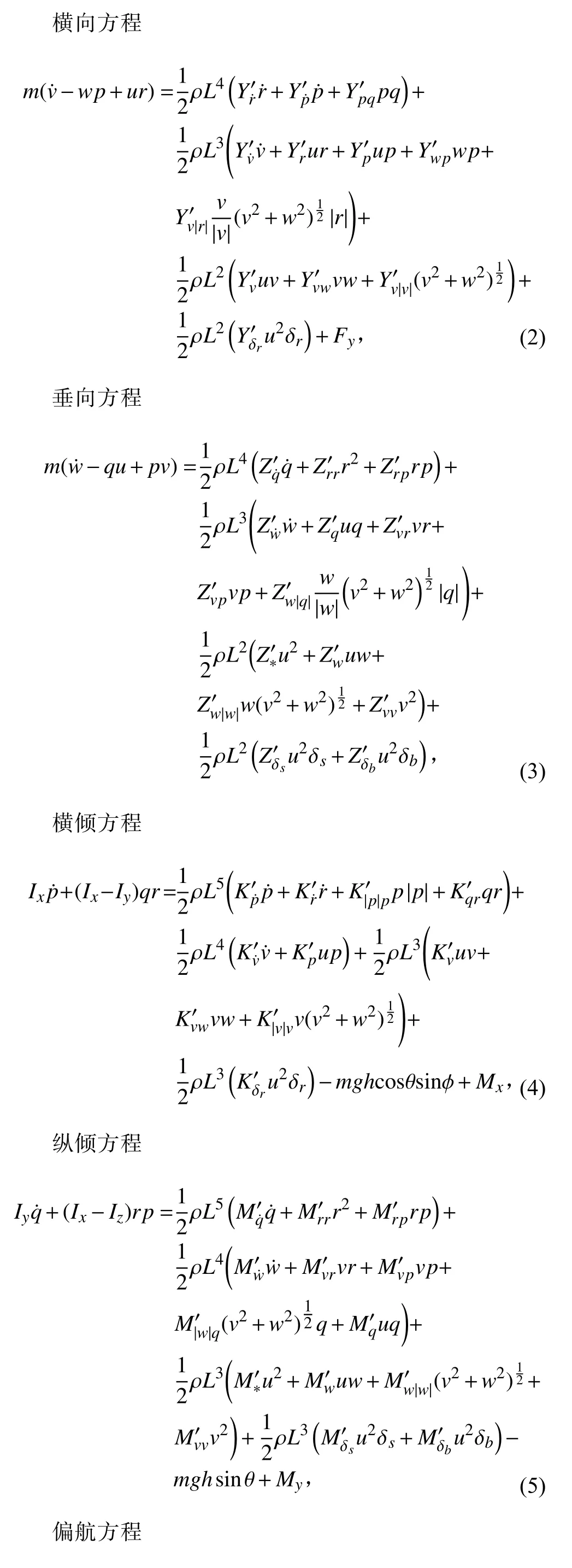
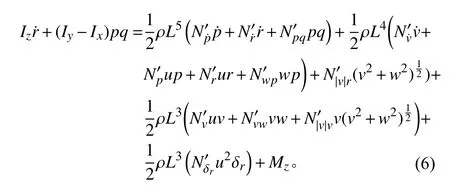
以上各式右侧为航行器的惯性水动力、黏性水动力及舵水动力的一般表示形式。
为了确定船舶在海洋空间中的位置和姿态,还需要补充6 个运动微分方程:
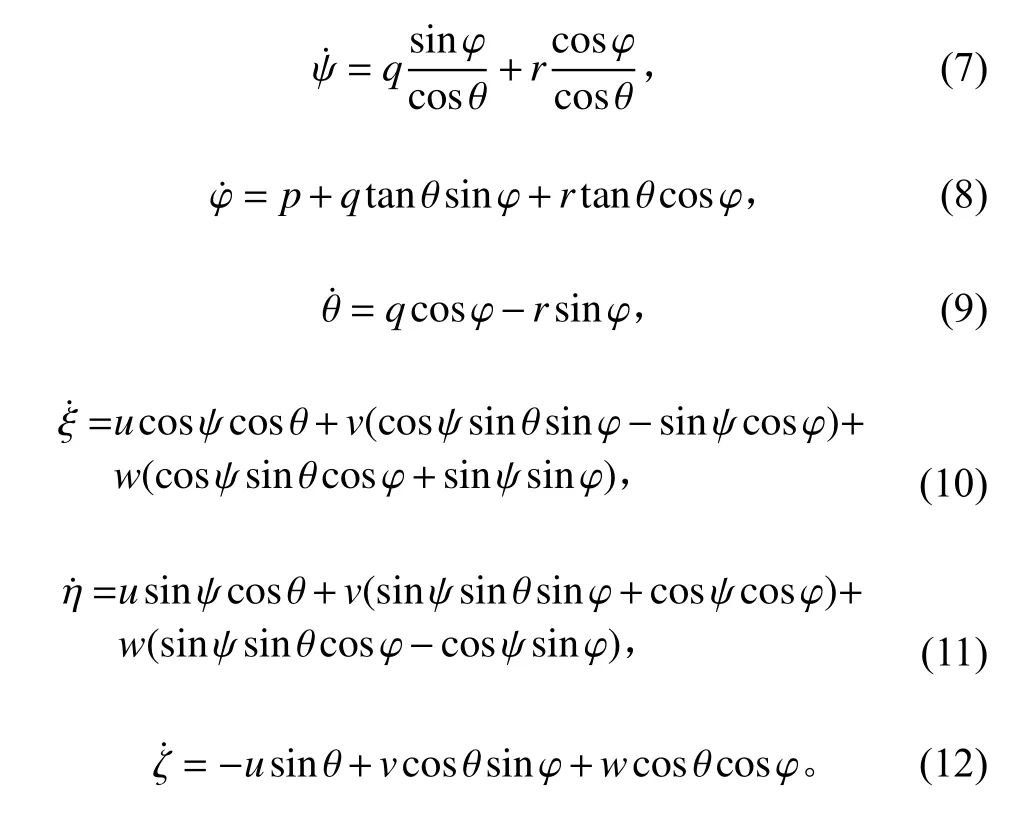
以上方程表征了航行器在水下的各向运动,作为对 航行器运动姿态进行预报和控制的重要依据。
1.2 海浪干扰力的计算
航行器在近水面运动时,不可避免受到海浪和海流的影响而产生摇荡,由于受到1 阶波浪力和2 阶波浪力的作用,存在低频慢变的倾侧与漂移和波频摇荡2 种运动响应。
1 阶波浪力呈高频周期振荡形式,在其作用下航行器主要做摇荡运动,即垂荡、纵摇以及横摇运动等。计算波浪的1 阶摇荡力的近似公式估算法有海勒默等,理论计算方法主要有细长体法、切片法、三维面元法等,模拟时可以运用数值解法。2 阶波浪力呈小幅值长周期形式,通常在同周期内为常值,主要与波高及深度有关,被称为波吸引力。对于近水面运动,当海浪为长波,航行器顺着海浪方向运动时,趋于随浪逐流,其深度变化较大;在海浪为短波时,航行器的垂直位置几乎不受浪涌的影响。
因此,航行器在水下受到的波浪力通常包括波动的1 阶波浪力和低频变化的2 阶波浪力。此外,由于风浪流的存在,航行器对流速度与无浪条件下的对流速度存在差异,而航速也会影响到航行器的动浮力。对于航行器的六自由度运动来说,动浮力通常会引起深度和纵倾的变化;低频的2 阶波浪力会产生深沉和纵摇运动,而1 阶波浪力通常会对6 个自由度都产生影响。
于是,海浪、风浪作用下的外部干扰力Xw,Yw,Zw和力矩Kw,Mw,Nw按照以下公式确定:
式中:下角标f表示1 阶波浪力;下角标s表示2 阶波浪力;下角标u表示动浮力。
艇体风浪中的动浮力为:
式中:Uw表示对流速度;ψ为浪向角;Cz和mz为水力系数。
航行器受到的海浪低频2 阶波浪力简化为恒值力和力矩,其形式可表示为:
式中:Zs,Ns为水力系数;bw为衰减系数;ζR为参考深度;ζ为实际深度。上述水力参数是在某一参考深度ζR获得的,在其他深度,航行器受到的2 阶波浪力随着深度变化而衰减,深度越深,2 阶波浪力越小。
1 阶波浪力通常采用多个正弦波叠加的方式进行逼近,正弦波参数包括频率和相位差。1 阶波浪力也随着深度的变化而衰减,衰减系数与2 阶波浪力相同。故所受的1 阶波浪力的模型可表示为:
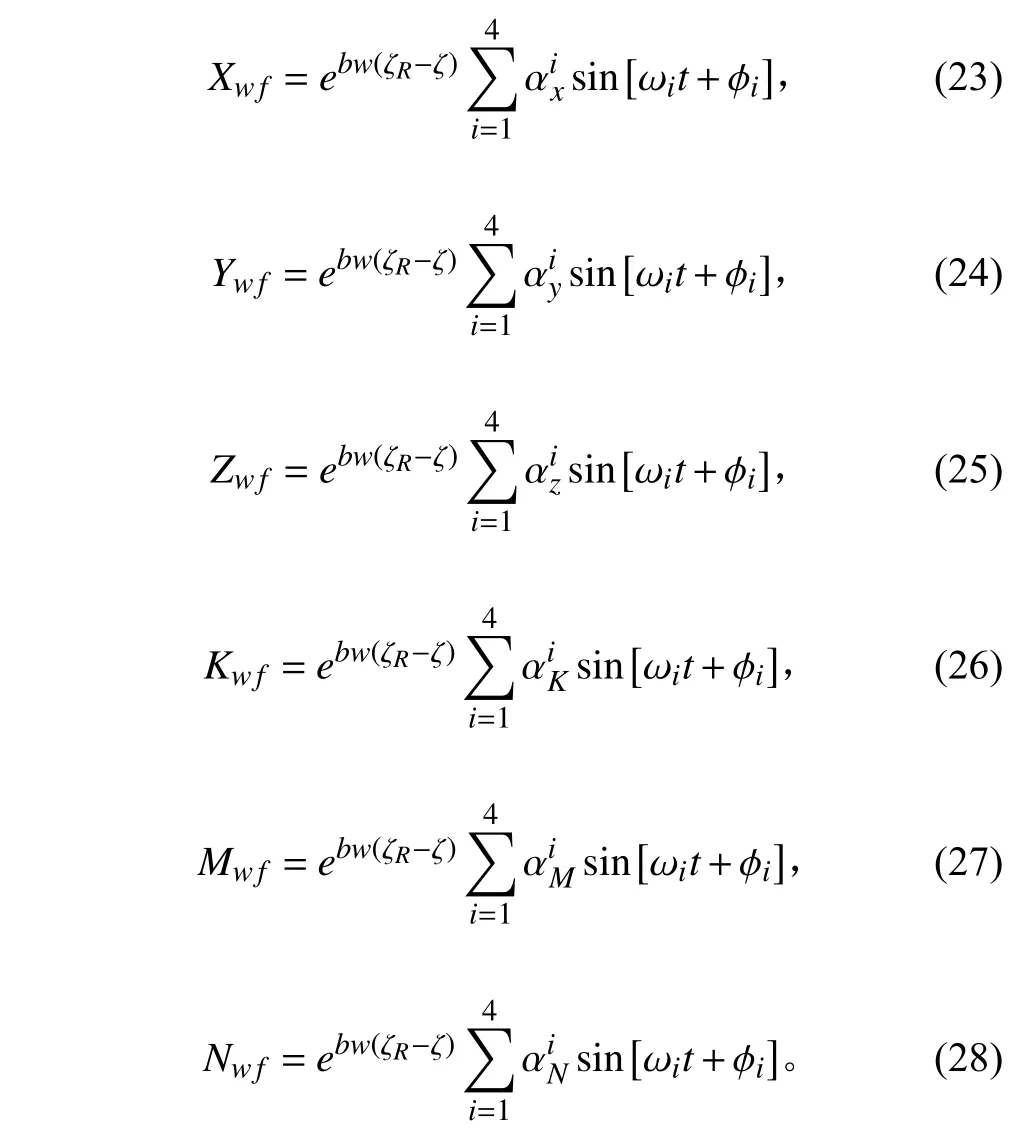
式中:bw为衰减系数;ζR为 参考深度;ζ为实际深度;为海浪作用力和力矩参数;ωi为 第i个正弦分量的频率;φi为其相位差。
基于以上数学公式的推导,在Matlab/Simulink 中建立航行器的六自由度运动学模型。其中,利用双环PID 控制水下航行器压载水系统的注、排水,以在航行器受到冲击力产生运动姿态及位置改变后,依靠惯性调节系统回到初始状态。
2 运动姿态惯性调节系统动力学建模
2.1 基于AMESim 的运动姿态惯性调节系统模型建立
2.1.1 水系统建模
水系统部分的模型主要由水舱、阀门、泵组和大水舱等元件构成。其中,水舱元件能接通气系统部分。水系统模型根据需求,配合气系统模型完成注水、排水、循环工况。
图2 为水系统部分的模型。水舱元件内部有水和空气,上方接入气系统,下方接入水系统。当与高压空气连通时,依靠高压空气和泵组进行排水;若与排气口相连通,则依靠泵组进行注水并排除水舱内多余的空气;如果都不连通,则水在泵通路内自循环,阀门起到调节不同工况的作用。
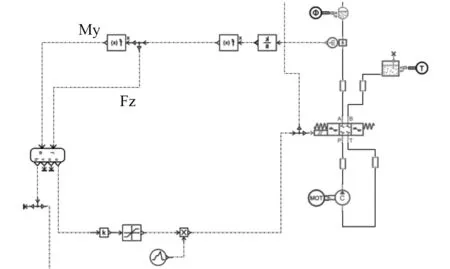
图2 水系统模型Fig.2 Water system modeling
2.1.2 气系统建模
气系统部分的模型主要由压缩空气、排气口、水舱供气阀、水舱排水阀、三通阀和水舱等元件构成,水舱元件连通水系统部分。气系统可以配合水系统,通过控制各阀开关或开度来实现注水、排水和循环工况。
图3为气系统部分的模型。水舱供气(排气)阀模型下端接阀门开度控制信号,以水舱内外压差为控制目标,利用PID 控制器进行调节。当水舱需要排水时,水舱供气阀打开,排气阀关闭,通过高压气体促使水从水舱流向泵组,从而排向大水舱;当水舱需要注水时,水舱排气阀打开,供气阀关闭,泵组将从大水舱流出的水泵向水舱,并把舱内多余的空气排出至排气口。三通阀在压载水系统内起到按工况连通相应阀组的作用,即排水工况下连通水舱供气阀,注水工况下连通水舱排气阀。
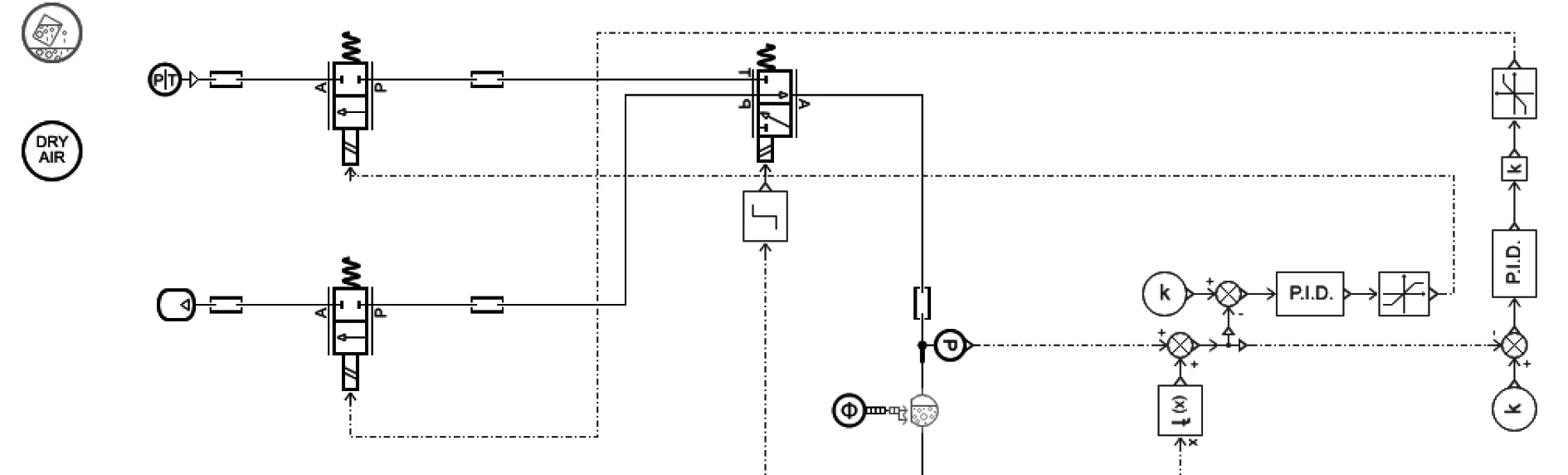
图3 气系统模型Fig.3 Air system modeling
2.2 面向多领域联合仿真的AMESim 压载系统模型编译
通过AMESim 与Matlab/Simulink 软件建立“航行器—压载水系统”的联合仿真模型,其中AMESim 用于压载水系统的建模,根据系统不同工况,输出相应的力与力矩;Matlab/Simulink 用于航行器运动学建模,接收AMESim 内由水舱注水、排水引起的力及力矩变化,计算整个航行器的运动状态,并输出位置信号给AMESim 压载水系统,以实现调节。
3 基于多领域联合的低速水下航行器深度调节系统仿真
设定工况:迎浪,航行器初始深度30 m,航速0.5 m/s,阀门切换时间5 s,仿真时间600 s,利用惯性调节系统使得航行器最终能维持在初始深度。仿真结果如图4~图6 所示。
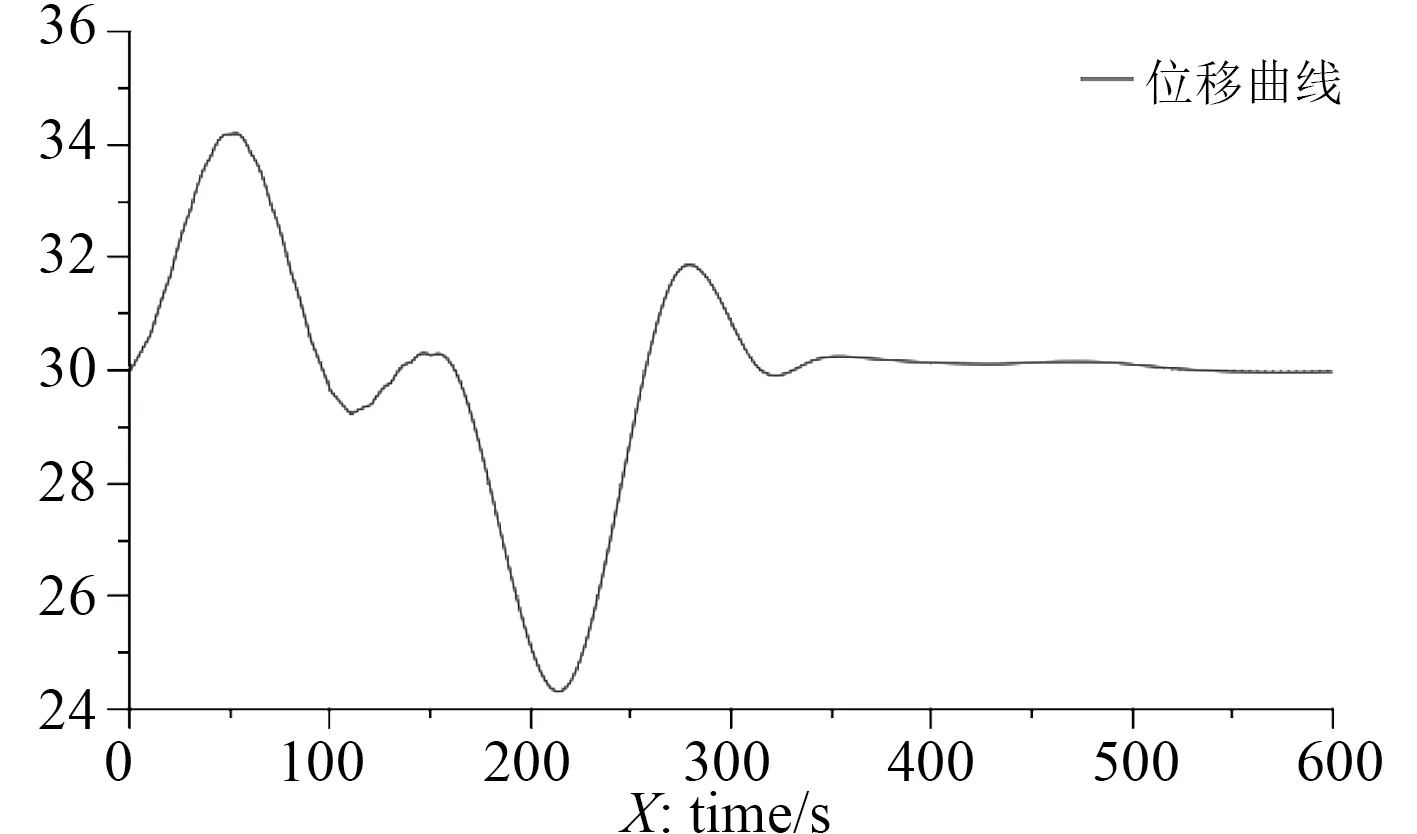
图4 典型工况下的位移曲线(m)Fig.4 Movement curve under typical condition
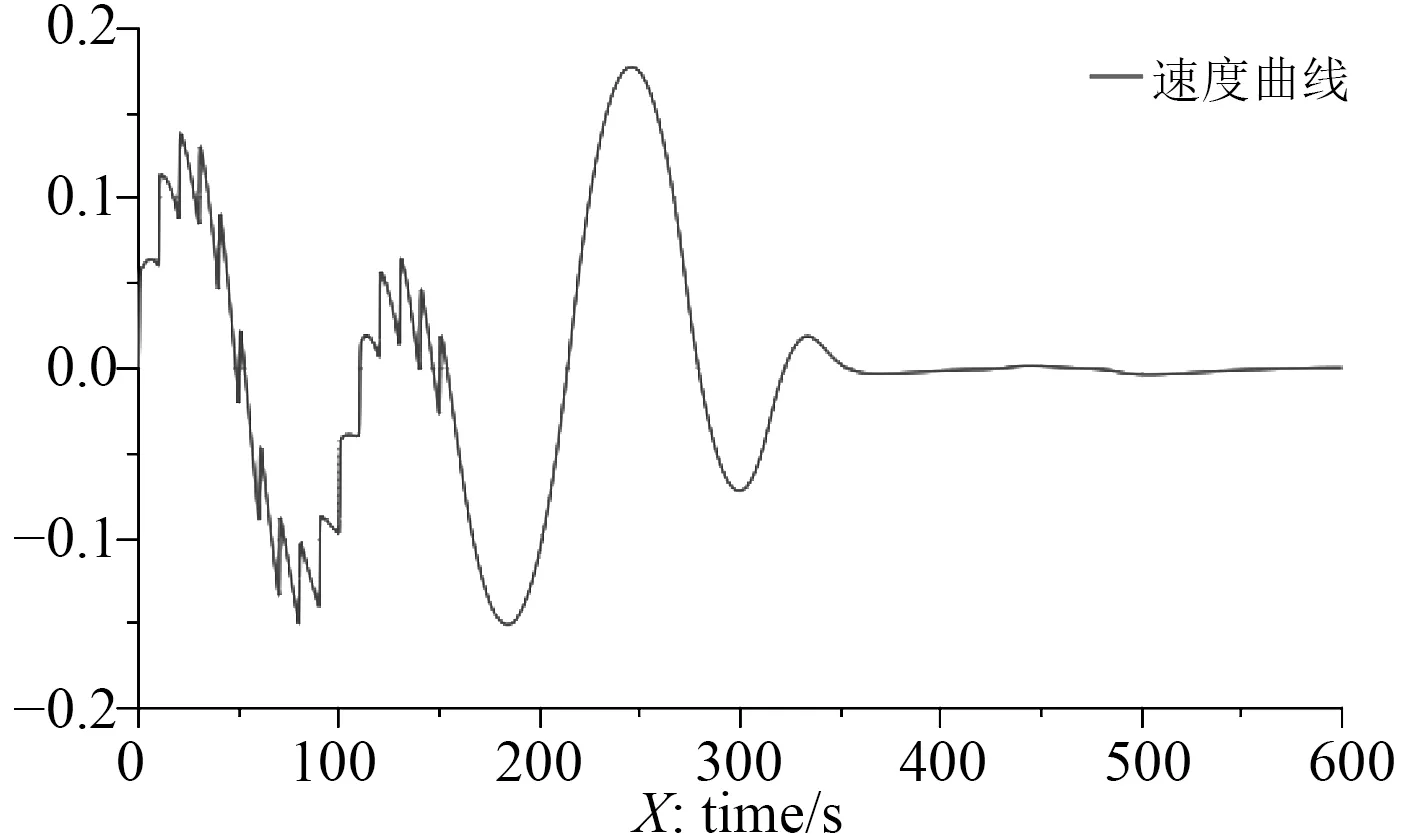
图5 典型工况下的速度曲线(m/s)Fig.5 Speed curve under typical condition
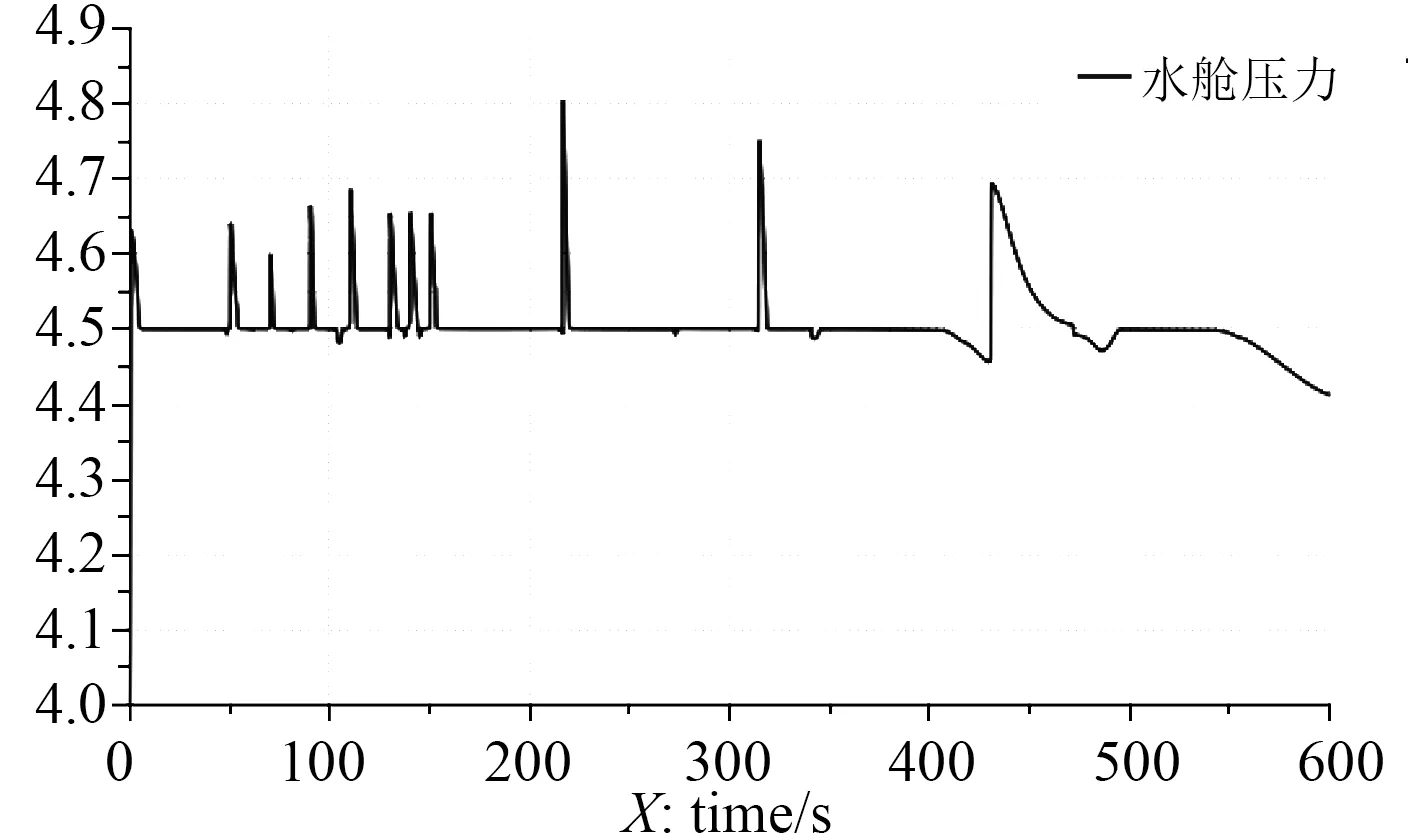
图6 典型工况下的水舱压力曲线(bar)Fig.6 Tank pressure curve under typical condition
4 结 语
本文基于Matlab 开发了水下航行器惯性调节系统多领域参数化建模与仿真软件系统,用来模拟水下低速航行器与其惯性调节系统的耦合动力学特性。以某小型水下航行器为例,在设定工况下,通过双环PID 控制惯性调节系统,适时改变航行器的运动姿态,使其能够在受到海浪和外部冲击后,短时间内维持到初始深度并将水舱压差控制在安全范围内,验证了系统的有效性。
