无人机遥感影像速生桉林分参数自动化提取研究
2021-08-05邱世平韦明新马依莎
邱世平,韦明新,马依莎
(1.广西南宁林业勘测设计院有限公司,南宁 530001;2.国家林业和草原局林产工业规划设计院,北京 100010)
随着硬件技术的迅猛发展,无人机遥感技术以其高精度、机动性强、低成本等优势[1],逐渐成为了森林资源监测调查、参数提取的一种重要手段[2]。汪小钦等[3]提出了一种可见光波段差异植被指数,并通过实验验证了植被提取精度要比其他的可见光波段植被指数高;周小成等[4]基于2期无人机影像,提出一种针对针叶林伐区蓄积量参数进行估算的方法;苏迪等[5]利用主成分回归方法提取郁闭度参数,并结合GIS因子,采用偏最小二乘法完成了蓄积量的估测;王枚梅等[6]针对亚高山针叶林,基于无人机遥感影像,自动化提取了冠幅、株数、郁闭度等森林参数;张煜星等[7]利用无植被区域设置的校正点,对数字表面模型DSM进行了高程校正;刘江俊等[8]针对不同分辨率的树冠高度模型,以均值滤波为滤波器,组合大小各异的平滑移动窗口提取树顶点;董新宇等[9]针对无人机原始影像进行增强,提出了一种单株立木信息参数自动化提取方法。以往研究大多数只针对某一种森林参数(如树冠、株数等)的提取方法进行研究,而对于树高、郁闭度等综合预估参数的研究尚存在诸多不足,且针对这些森林参数的提取精度,尚未给出科学系统的精度评价依据。
本文以速生桉林为研究对象,基于无人机航拍影像,经航测内业数据处理,得到数字正射影像模型DOM成果和数字表面模型DSM成果,从而构建出速生桉林的树冠高度模型,最后完成速生桉林株数、树高、郁闭度等森林参数的自动化提取及精度分析,并通过具体实践结果,验证了通过该方法提取森林参数的可靠性。
1 研究区概况
选取广西扶绥县龙头乡将军屯速生桉林为试验区,该速生桉林为4a生人工一代纯林,土地种类为乔木林,优势树种组为巨尾桉,郁闭度0.7,下木灌木层平均盖度5%,下木灌木层平均高1.2m,草本层平均盖度97%,草本层平均高0.5m,面积46 620m2,其中,航摄区域面积约200 000m2。分2个架次进行航飞,其中第1架次布设了22条航线,5 040张航片,第2架次布设了8条航线,1 700张航片,航摄比例尺为1∶500,平均地面分辨率为0.05m,采用SONY-A5100相机进行航拍。测区共布设50个平高控制点,其中,第1架次35个,第2架次15个,均匀分布在测区。具体航摄结合如图1所示。
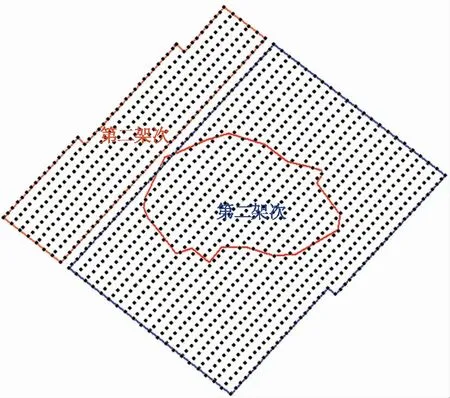
图1 航摄结合图
2 研究方法
基于无人机遥感影像,实现速生桉林分参数自动化提取技术原理,主要包括无人机遥感影像数据处理、速生桉林分参数自动化提取及精度分析三部分。
2.1 影像数据处理
无人机遥感数据处理的目的,主要是恢复无人机航拍时的准确位置和姿态,以获取数字正射影像成果DOM和数字表面模型成果DSM。其实现原理主要是根据共线方程,通过同名影像点的匹配进行初始空三平差校正,然后加入地面控制点,重新优化空三平差,得到高精度的内外方位元素,准确恢复航拍影像的真实位置和姿态,之后进行点云密集匹配,提取DSM,再对DSM进行滤波处理,得到数字高程模型DEM,最后,进行单片纠正和镶嵌,获取数字正射影像成果DOM。本研究主要通过Pix4D软件来进行无人机遥感影像数据处理[10],具体流程如图2所示。
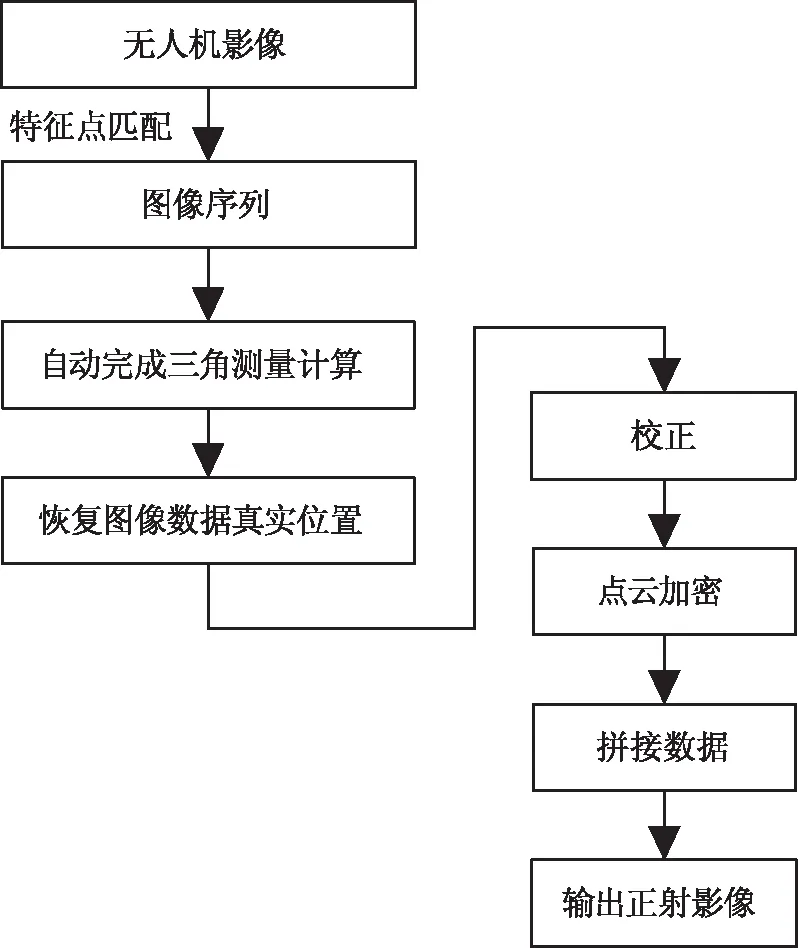
图2 无人机影像数据处理流程图
2.2 林分参数自动化提取
1) 树冠高度模型的构建。根据无人机遥感内业数据处理的DSM成果和已有的DEM成果,做差得到高度模型,再根据DOM成果,裁剪速生桉林区域的航摄,裁剪得到速生桉林的树冠高度模型。本文根据已有地形图成果采集等高线,通过空间差值,得到该速生桉林区的数字高程模型DEM,其精度为1m,将该DEM与无人机航测数据处理后得到的数字表面模型DSM做差即可得到树冠高度模型。
2) 株数提取。基于局域最大值法自动提取速生桉林株数。针对绿波段影像,通过高斯滤波方法,对树冠高度模型进行平滑处理,并在滤波后的树冠高度模型中,指定一个标准的窗口值,获取的局部极大值即为树冠最高点,同时,根据树冠最高点的个数获取该区域速生桉林的株数[11]。本文在窗口值的研究过程中,首先对无人机遥感影像中包含有分类的物质进行剪裁,以反映影像视觉效果和影像纹理紧密程度两个纹理特征为例,来确定窗口值。
3) 树高提取。树高提取主要基于树冠高度模型来实现,通过确定每株林木的实际坐标位置,以此坐标对应到树冠高度模型的坐标,该位置在树冠高度模型的高程值即为该棵林木的树高[12]。
4) 郁闭度提取。郁闭度的提取方法众多,常用的有样点法、样线法、目测法、树冠投影法。本文采用掩膜分析法来实现速生桉林郁闭度参数自动化提取。由于有树冠顶部枝叶部分和没有树冠的地面部分存在明显的高差,通过对照数字正射影像DOM,在树冠高度模型灰度图上会存在明暗交界的区域,确定阈值,区分地面区域和树冠区域,统计分析,树冠区域占整个速生桉林样地区域的比值,即为该速生桉林郁闭度[13]。
2.3 林分参数提取精度分析
1) 株数提取精度。采用株数探测率、株数准确率、F参数3个指标,对速生桉林的株数提取精度进行验证分析,计算公式如下所示。
(1)
(2)
(3)
式中:Pr,Pp,F分别表示速生桉林株数探测率、速生桉林株数准确率、F参数;Mt,Mc,Mo分别表示正确分割的株数数量、漏分株数数量和过度分割的株数数量。
其中,正确分割的株数数量为自动化提取的林木株数中,能够正确地与实测林木一一对应的林木数量;漏分株数数量为实测林木中,没有找到与之一一对应的自动化提取的林木数量;过度分割的株数数量为自动化提取的林木株数中,没有实测林木能够与之一一对应的林木数量。3个精度验证指标越高,说明自动化提取的株数参数越准确,反之,3个精度验证指标越低,说明自动化提取的株数参数准确度不可靠。
2) 树高提取精度。针对树高的提取精度,采用树高实际值与树高自动化提取的估测值之间的残差及其决定系数来进行验证分析,其残差与决定系数的计算公式如下所示。
V=H0-H
(4)
(5)

决定系数表示树高实际值与树高自动化提取的估测值的拟合程度,决定系数越大,说明二者之间的相关性较强,拟合模型精度越高;而残差可以直观的反映出自动化提取树高参数的准确度。
3) 郁闭度提取精度。郁闭度的提取精度分析一般采用直接比对法。通过计算标准实测郁闭度和基于自动化提取的郁闭度之差的绝对值占标准实测郁闭度的比重来衡量,具体计算公式如下所示。
(6)

3 结果与分析
3.1 航测数据
通过Pix4D软件对无人机航测影像进行处理,经初步处理,快速检测,提取海量同名点并优化初始POS,检查快速处理质量报告,无误后刺入控制点,重新优化平差,利用点云密集匹配数字表面模型DSM,最后生成0.05m高分辨率的数字正射影像成果DOM,如图3所示。

图3 数字正射影像图
3.2 林分参数自动化提取
1) 速生桉林株数提取。选取(1×1)~(11×11)共8种不同窗口值,并给出相应窗口下反映影像视觉效果和影像纹理紧密程度2个纹理特征,具体纹理数值如表1所示。
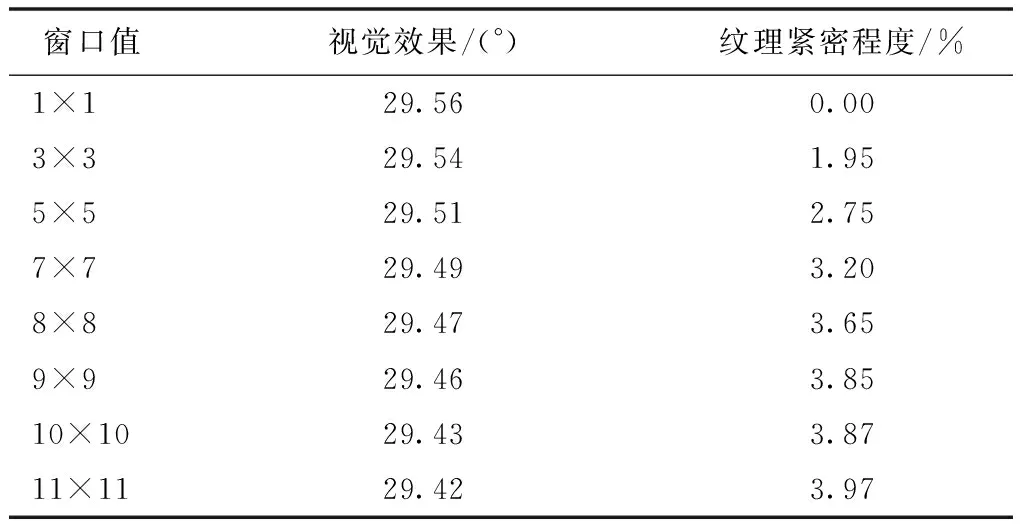
表1 纹理数值变化表
由表1可知,影像视觉效果随着窗口变大而逐渐变小,纹理紧密程度随着窗口变大而逐渐变大,并在8×8后趋近于平缓状态。从该表格内选取 5×5,8×8和11×11这3种不同窗口规格,由此获取影像纹理图,如图4所示。

图4 不同窗口规格影像纹理图
3种不同窗口规格下进行纹理信息分析可知,8×8窗口规格下的影像纹理更为清晰。以该窗口值提取树冠顶点,同时,通过顶点个数即可获得该速生桉林的株数。
2) 速生桉林树高提取。根据窗口值8×8,在树冠高度模型中提取该速生桉的树高。根据径级的不同,自动化提取的树高值在10.06~17.33m之间。
3) 速生桉林郁闭度提取。通过掩膜提取分析法自动化计算,该速生桉林的郁闭度为0.75。
3.3 精度验证分析
通过树冠高度模型,可实现速生桉林分参数的自动化提取。为验证自动化提取的可靠性,分别对速生桉林株数、树高、郁闭度等参数进行验证分析。
1) 速生桉林株数提取分析。在8×8的窗口值下,自动化提取速生桉林株数共6 107株,而通过人工实测统计,该速生桉林株数为6 225株。其中,正确分割株数为5 843株,漏分株数为126株,过度分割株数为531株,由式(1)—式(3)可分别计算株数探测率、株数准确率、F参数。具体参数值如表2所示。
结果表明,速生桉林株数提取精度验证指标较优,基于此自动化方法提取的速生桉林株数具有较高的精度。
2) 速生桉林树高提取分析。为验证速生桉林树高提取精度,实验采用Vertex IV测高测距仪分径级实测树高,其中,该速生桉林区共分10个径级,每个径级选取3~5株林木,记录每株林木的实际坐标位置,形成文件,并实测其树高值,取平均值作为每个径级的实测树高值。
根据DOM成果和实测林木的坐标位置展点图,进行叠加分析,在树冠高度模型中,找到该速生桉林区中实测的那些林木坐标位置,提取这些林木在树冠高度模型中的高度值,即为树高估测值。最后将树高估测值分径级取平均值,作为该径级的估测树高值。将其与相应径级的实测树高值进行对比,得到树高对应表(表3)。其中,速生桉径级单位为厘米(cm),实测平均树高单位和自动提取树高单位为米(m)。
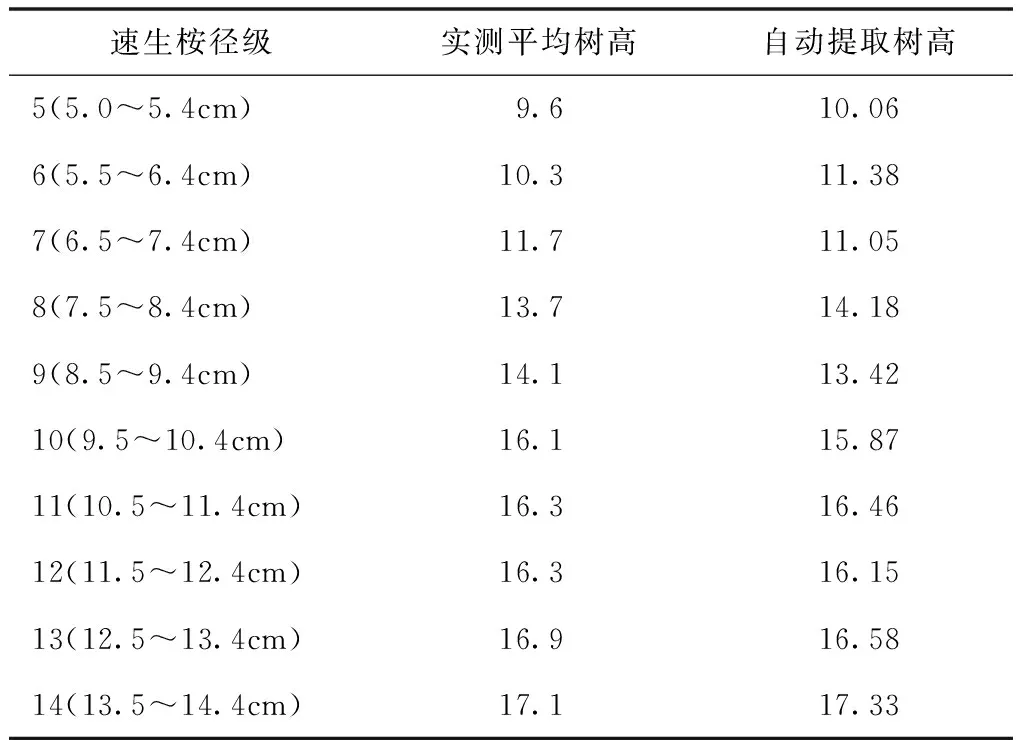
表3 树高对应表
根据实测树高与自动提取树高作差,得到树高残差分布图(图5)。
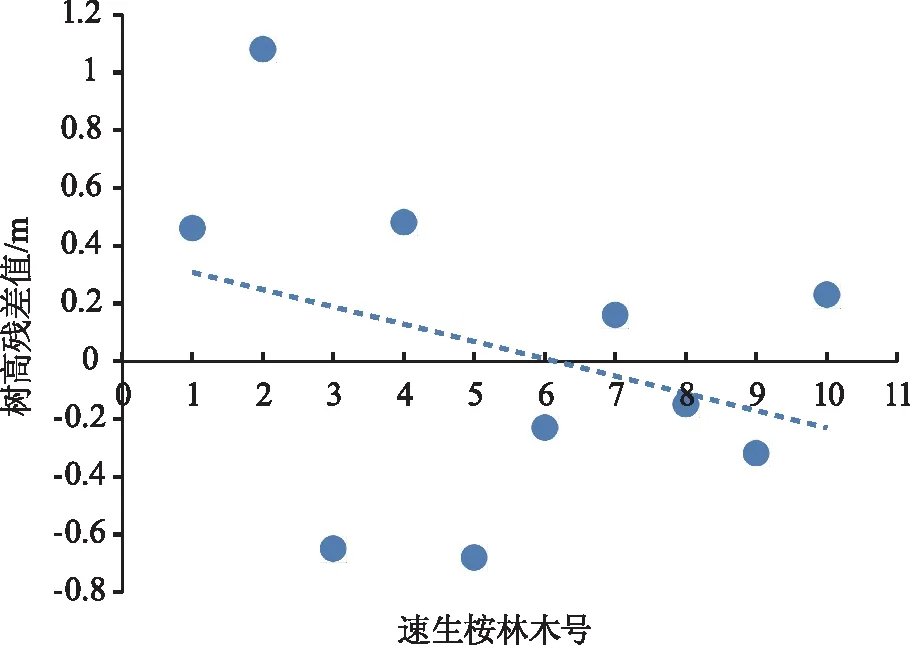
图5 树高残差分布图
根据树高预估值与树高实测值,由公式(5)计算其决定系数为0.915。结合残差分布图可知,使用自动化提取的速生桉林树高预估值与树高实测值之间拟合程度较高,二者存在线性相关性。
3) 速生桉林郁闭度提取分析。通过掩膜提取分析法自动化计算,该速生桉林的郁闭度为0.75,而该速生桉林概况实地调查值为0.7,其郁闭度提取准确度为92.85%,由此可知,基于无人机DOM和DSM成果生成的树冠高度模型,采用掩膜提取分析法提取的速生桉林郁闭度,可在较大程度上替代人工调查实测值。
4 讨论与结论
基于无人机遥感影像的速生桉林分参数自动化提取方法,其株数探测率为0.978 8,株数准确率为0.916 7,F参数为0.946 7,株数提取精度相对较高;树高预估值与树高实测值的决定系数为0.915,两者之间呈线性相关;郁闭度估测参数值为0.75,相较实地调查值0.7,郁闭度参数提取准确度高达92.85%。由此可知,基于无人机遥感影像的分参数自动化提取方法,可以在较大程度上替代传统的提取方法,在森林结构单一的速生桉林中具有较大的推广应用价值。
本文提出的方法虽实现了速生桉林分参数的自动化提取,能够满足林业部门对于高效提取速生桉林分参数统计要求。但由于实验数据并不具有普遍代表性,因此,在后续研究进程中仍需采集实测数据,重复进行大量实验验证分析,以提高方法模型的普遍适用性。由于研究样地数据为一代纯林,林相较为整齐,株数提取精度相对较高,对于林相差、林相参差不齐以及萌芽的二代林,其树木高度参数不一,若个别幼林树冠中心点参数未能准确提取出来,将影响株数参数的提取精度。因此,针对树种众多、林层结构复杂的情况,本文的研究成果能否满足相应要求,尚需进行更多的实验进行验证。
