基于自组织神经网络的终端区航迹识别研究
2021-08-04谢春生柳跃朋
谢春生,赵 龙,柳跃朋
(中国民航大学a.空中交通管理学院;b.机场学院,天津 300300)
航空器通常在空域内按照一定的航路、航线和程序飞行,但设备、天气等因素会导致航空器在运行中出现一定的偏离。随着自动相关监视广播系统(ADS-B,automatic dependent surveillance-broadcast)的广泛使用,在为民航运行提供便利的同时,也促进了航空器运行航迹的深入研究。准确识别和分析航迹数据将极大地促进空域结构优化、航路和航线规划、飞行程序设计和交通流态势分析等问题的研究。
国外对于航迹的研究已有了较多成果。García 等[1]从分类角度出发,以历史数据为基础,采用一种概率预测模型对某个航迹段进行分类。Enrique[2]从航迹聚类角度出发,采用一种层次聚类方法来识别终端区的交通流,识别结果具有良好的鲁棒性。国内对航迹的研究大多从聚类角度出发:王涛波等[3]在航迹分析中引入遗传模拟退火算法对模糊C 均值聚类进行改进,使聚类中心偏离数据点集中位置的问题得到改善;徐涛等[4-5]以航迹点法向距离来度量航迹的相似度,并采用K 均值聚类算法对航迹进行聚类分析,改善了聚类的效果,同时还提出以航迹间面积大小来确定航迹间的相似度,采用CURE 聚类算法分析航迹与标准飞行程序的关系,为飞行员飞行品质的评估提供了参考。聚类分析作为无监督学习的典型方法,在航空器航迹研究中得到了广泛使用,但同时也受多种因素影响,会出现聚类结果不理想、聚类中心偏离过大、类别数量与实际偏差过大以及计算困难等问题。
模式识别已经在语音识别、图像识别、医用科学等领域中得到广泛运用。Lukas 等[6]利用模式识别技术处理图案噪声,并降低了图像识别的误报率。Barrachicote 等[7]利用模式识别对语音进行分类,取得了良好的效果。此外,模式识别在对其他运动主体轨迹研究中也得到一定运用,李婷等[8]对人类活动轨迹模式的相关研究做了详细的介绍,包括人的运动轨迹数据采样轨迹点组成和不同角度运动轨迹模式的识别,以及其在可视化模拟和监控等方面中应用;郭际明等[9]以智能手机的传感器数据为基础,利用支持向量机的方法,对人上下扶梯、电梯等几种状态进行识别且识别率较高;任艳青等[10]将模糊神经网络运用到乒乓球旋转运动的研究中,对上、下、左、右旋球进行了有效的分类。
模式识别在类似的轨迹分析领域研究中已取得一定的成果并广泛应用,但极少应用于航空器航迹分析研究领域。由于提前获得航迹样本在实际研究中具有一定困难,因此选择自组织神经网络(SONN,selforganizing neural network)方法,从一个新的角度研究航迹的特性,克服聚类分析中存在的问题,从而改进终端区的航迹识别问题。
1 航迹数据获取与处理
1.1 航迹表征与处理
《民用航空空中交通管理规则》[11]对终端区的空域范围做了一定的划设,即高度在6 000 m(含)以下最低高度层以上;水平范围为半径50 000 m 或者走廊进出口以内的除机场塔台管制区以外的空间。终端区内航空器的飞行航线主要有:进场航线、离场航线和飞越航线。
使用ADS-B 设备,以1 s 的扫描率获取某终端区范围内所有航空器运行的实时经度、纬度、高度、速度、升降速度等数据。一系列的离散点构成了每个航空器的航迹。设时间t内某终端区有m架航空器飞行,则在t时间内统计到的航迹集为

式中Di为第i架航空器的航迹,i=1,2,…,m,由ni个航迹d点组成,则表示为

从航迹点中选取时间t、经度x、纬度y、高度h4 个参数表征航迹点的特征,则航迹点表示为

不同航迹集合在数据质量、航迹点序列长度和时空分布等方面有时会存在较大差别,不能满足航迹分析中数据间应具有相似性的要求。因此,通过线性插值的时间归一化方法,把所有航迹映射到t∈[0,1],以等时间间隔Δt分布,可把所有航迹转变成等航迹点数量且有相同时间分布的序列Di′={d1′,d2′,…,dn′}。
1.2 航迹间的距离
空间任意两点(x1,y1,z1)和(x2,y2,z2)之间的欧式距离为

对于两个航迹Di′与Dj′,航迹Di′上的点dk′(xk,yk,hk)和航迹Dj′上的任意点(x,y,h)由于经纬度和高度之间的计量单位存在区别,先将两点间的经纬度差转换为距离,再结合高度计算两点间的空间距离为

式中R为地球半径,取R=6.371×106m。
取最小的Sk作为dk′点到航迹Dj′的最小距离,以同样的方法计算航迹Di′上其他点到航迹Dj′上的最小距离,再取航迹Di′上所有点到航迹Dj′最小距离的平均值,作为航迹Di′到航迹Dj′的距离。航迹Di′到航迹Dj′之间的距离定义为

式中n为航迹Di′上的航迹点数量。
2 基于自组织神经网络的模式识别
2.1 自组织神经网络
自组织神经网络[12-14]以竞争学习为核心,各网络单元在受到外界刺激时会相应产生竞争响应,竞争胜利的一个或几个网络单元得到接受刺激权利,从而自适应地改变了原网络结构。SONN 有输入层和竞争层两层结构。输入层将接收到的外界信息传给竞争层;竞争层分析对比,调整胜利单元的权向量,同时调整其周围单元的权值,寻找规律。
2.2 自组织神经网络实现过程
在SONN[15]中,初始为各神经单元赋予对应的小的随机权值向量W=(Wi),i=1,2,…,m,其中Wi=(ω1,ω2,…,ωp)。建立初始胜利域Ni*(0),学习率为η。输入样本特征数据集X=(Xj),j=1,2,…,n,其中Xj=(x1,x2,…,xq)。
1)向量归一化
由于各指标可能存在不同计量单位,量值上的差别过大会对结果造成较大影响,同时神经网络对于介于0~1 之间的输入与输出数据处理效果较好,因此,对样本向量进行归一化处理,即

将权向量和样本向量分别归一化得到Wi′=(ω1′,ω2′,…,ωp′)和Xj′=(x1′,x2′,…,xq′)。
2)寻找获胜神经单元
将输入的样本向量和竞争层各神经元所对应的权向量做相似性比较,把最相似的权向量对应的神经元视为胜利单元。而相似度的判别方法就是通过作向量的内积得到,在单位圆中找到与样本向量夹角最小的点为获胜单元,即

3)调整网络输出和权值
获胜的神经单元获得输出为1,其余则为0,即

同时,获胜单元获得调整权值的机会,各单元的学习调整的规则为
式中δ(x)为学习率,且δ(x)∈(0,1]。随着学习逐渐深入,学习率逐渐减小,表明调整的幅度越来越小,即逐渐接近类别中心。
4)迭代至收敛
经过调整的新向量已经不是单位向量,所以要对新向量重新归一化,重复步骤1)~步骤3),重复多次训练,直到δ(x)逐渐衰减至趋向于0。
5)测试
输入新的样本,通过训练好的神经网络进行计算。若某一类对应的节点相似度最大,则将其分入到该类中。对比其所属的航迹与分入类别中其他航迹的相似情况判断其是否归入了正确的类别。
3 算例分析
3.1 数据来源
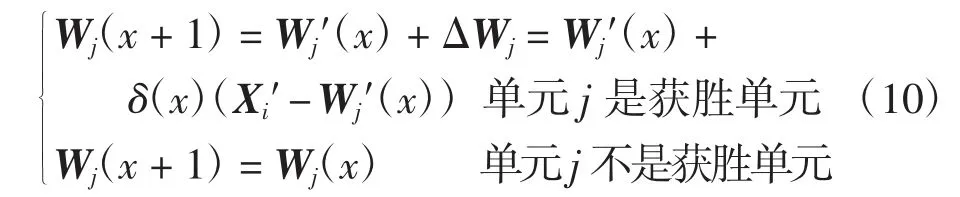
为了便于初步研究,采集了国内某国际机场所在终端区空域内流量正常一天内的飞行数据作为原始数据。以应答机码和航班号同时唯一性,筛选出每一条航迹包括的航迹点数据,一共筛选出482 条航迹数据点。以经度、纬度、高度为参数,各航迹的空间分布情况如图1 所示。
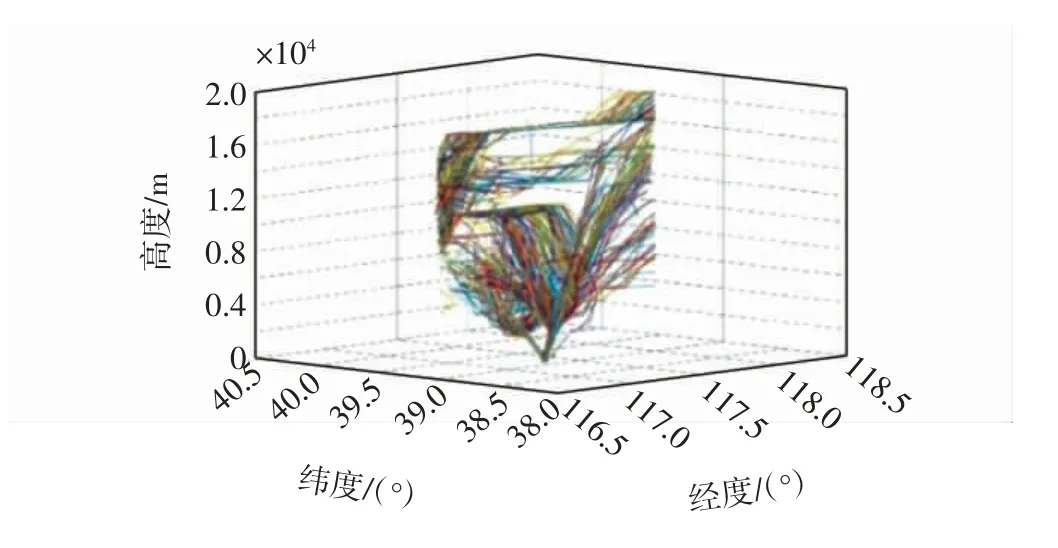
图1 终端区内航迹分布情况Fig.1 Track distribution in terminal area
3.2 数据预处理
根据文献[16]中对航迹数据的筛选与处理方法,对获取的数据进行空间筛选、有效数据关联、有效航迹筛选和归一化处理,并且映射到时间t∈[0,1]的等时间间隔Δt 中。
根据式(6)计算航迹间的平均最小距离,构造航迹间的距离矩阵。取,作为轨迹间相似度矩阵A 的元素,计算所得的相似度矩阵如下,即
3.3 实验仿真与结果
任意选择400 条航迹数据作为训练集,以其和其他航迹的相似度向量构成的矩阵作为训练数据,并进行训练。由于临时航线、雷雨绕飞等问题,终端区内的航线数量共计33 条。网络节点的数量选取和样本里的模式类别有关,因此将竞争层设为6×6 的网格。
经过1 000 次的稳定训练后得到收敛。由于输入数据的空间高维性,无法同时可视化所有权值,所以用SONN 相邻距离图来表示相邻神经单元之间的距离。六边形的点为神经单元,线条连接了相邻的单元。将线条包围的区域代表了其间的距离,颜色越深,距离越大,如图2 所示。
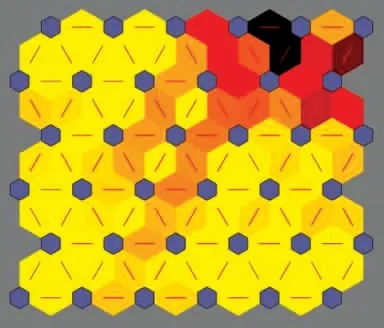
图2 相邻神经元间距离示意图Fig.2 Schematic diagram of distance between adjacent neurons
每条航迹相应地分入对应神经单元中,一共分成了32 类,与该终端区内的航线数量相当。每个神经单元包含的航迹数量如图3 所示。
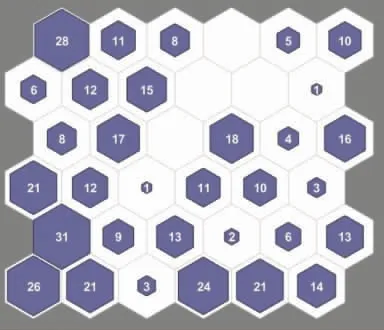
图3 各单元内的航迹的数量分布Fig.3 Number of tracks within each unit
在大量数据样本中任意选择其中一类,绘出其包含的所有航迹,如图4 所示。

图4 同一类别的所有航迹走向分布图Fig.4 Distribution of all tracks in same category
对比航迹走向可发现在本类中的14 条航迹中,仅存在1 条分类异常的航迹。统计对比了所有类别中的异常航迹数量,共有37 条,分类正确率达90.75%,属于可接受的水平。
将剩下的82 条航迹输入训练好的网络,同样选取了和前面相同分类的航迹,如图5 所示。

图5 测试集中同一类别的所有航迹走向分布图Fig.5 Distribution of all tracks in same category on test set
从图5 可看出,测试集在航迹高度、空间位置与训练集相似,可认为该模型正确识别了该类的航迹。其他分组的航迹也大部分可识别,异常航迹数量约为6条,分类正确率达92.68%。
4 结语
基于SONN 模式可以较为准确地识别出终端区空域内航迹数据对应的飞行航线。与传统使用的无监督学习的K 均值聚类算法相比,SONN 是一种不需要提前确定聚类中心数量的自组织学习方法。实验结果准确,可为更深入研究航迹特征提供基础。下一步研究可在此基础上就实验中识别错误的航迹提出改进方法,提高识别正确率;同时,后续研究还可就特殊天气造成的航班绕飞的航迹识别做进一步探讨与验证。