基于模糊控制的受电弓气路气压监测系统设计*
2021-08-03顾建凯赵德生
顾建凯, 赵德生
(1. 南京铁道职业技术学院机车车辆学院, 江苏 南京 210031;2. 南京铁道职业技术学院通信信号学院, 江苏 南京 210031)
引 言
接触网电能通过稳定运行的弓网耦合系统进入车体给予车辆中相关用电设备用电保障,这在车辆安全运行中起到了关键作用,同时良好的弓网耦合也能够减少受电弓滑板的过度磨损或者弓网之间产生的拉弧现象[1]。本文旨在研究以影响弓网系统稳定运行的相关参数指标作为反馈对受电弓气囊气压进行随动调整的受电弓主动系统,并且该控制系统结合了强调机车运用控制经验和知识的模糊控制算法,并通过仿真研究证明了该控制系统的可行性。
1 弓网耦合性能影响要素
弓网耦合系统能否良好运行在一定的工作环境下由弓网之间的接触力决定,而弓网之间的接触力由以下几个方面构成:①与气囊充气后产生的升弓力矩有关的受电弓静态接触力Fs;②与列车运行速度有关的空气抬升力Fl;③弓网耦合系统的动态接触力Fd[2]。
因此,接触力F=Fs+Fl+Fd。
而以上的接触力影响要素中空气抬升力和动态接触力很难去主动调整改变,所以目前研究方向主要以对通过主动或者半主动控制对静态接触力进行调整,有些学者还进行了在原有受电弓结构框架中加入第三方动作设备进行接触力数值干预。而本论文的研究方向为:在不改变受电弓原有机械动作结构的接触上对气路部分进行主动控制系统嵌入设计,所以研究设计的落脚点为贴合当下机车运行工况要求对受电弓气囊进行充排气,以寻求适时地主动改变弓网接触力的结果。
2 受电弓现有结构及应用问题
目前铁路电力列车基于一定的逻辑控制条件并落实到具体电路和气路控制来实现受电弓的升降弓控制,并且整个受电弓控制模块合理地嵌入到机车控制系统当中。以HXD1C为例进行说明,其以中央控制管理系统CCU为信息检测控制中心,进行对受电弓升弓模式和条件的判断,并最终经由受电弓控制阀板进行受电弓升降弓气路的整定完善,而受电弓控制阀板包含了受控于CCU的电空阀、空气过滤器、升降弓时间调整的节流阀、气路压力调整的精密调压阀、显示气路气压值的压力表、气路保护的安全阀以及检测气路气压阈值的压力传感器[3]。其控制阀板的结构图如图1所示。

图1 受电弓控制结构图
该受电弓控制系统在实际应用过程中,由于列车自身运行状况欠佳,系统不能及时反馈会引起欠稳定运行结果,包括:①虽然精密调压阀起到了整定气路气压的作用,但也存在了当输入气压小于整定气压要求时难以满足升弓气压要求而造成了弓网接触压力小于额定值;②当气囊漏气快排阀难以及时作用而造成弓网接触压力小于额定值[4];③由于列车运行速度的改变,受电弓控制系统难以及时做出反应造成弓网接触力不符合实际运行需求。以上状况都会造成受电弓与接触网之间发生不良接触造成拉弧或者碳滑板过度磨损现象。
3 基于模糊控制的控制系统设计
弓网耦合系统是非线时变动力学系统,采用一般线性控制策略与方法难以达到系统预期效果,因此不受被控制对象的精确数学模型以及依赖于系统工作经验数据和原理的模糊控制方式可以成为构建受电弓主动或是半主动控制的理论构建基础,并且模糊控制系统的鲁棒性较强,对系统过程参数的变化不敏感,善于表达界限不清楚的定性知识与经验。
本文设计系统的构成框架如图2所示,其中列车速度传感器实时检测列车运行速度并由控制系统根据当下速度进行气囊要求值匹配,而后检测碳滑板下方受力和碳滑板本身的加速度得知弓网之间实际接触压力。得知的实际接触力与需求接触力进行差值计算并作为模糊控制系统的输入量,而模糊控制系统的输出量充排气电磁阀线圈通电时间作为气囊气压执行器的触发信号。
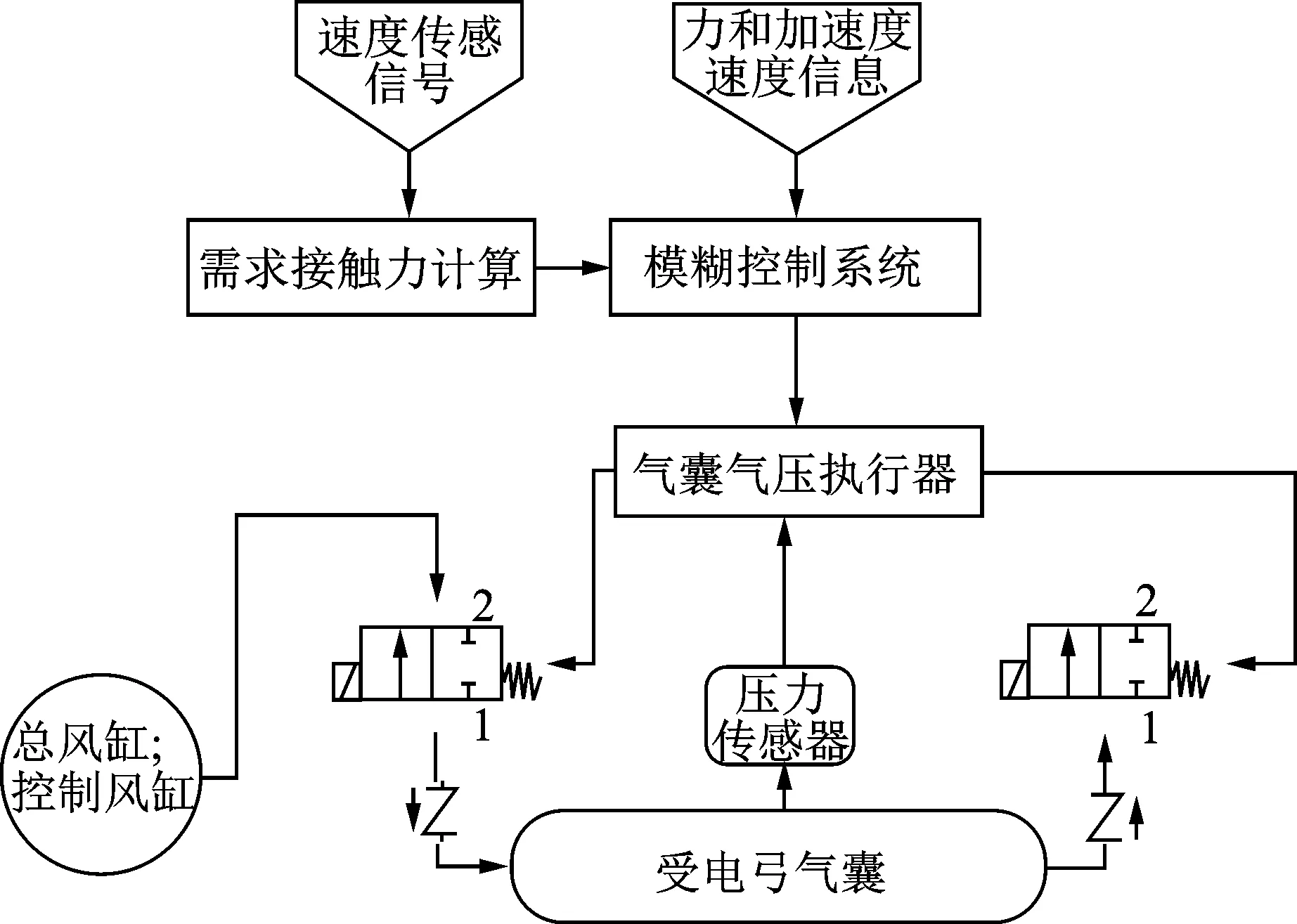
图2 系统总结结构图
列车的运行速度与弓网目标接触力之间关系通过现场长时间的运行经验得到,可以明确的是当机车速度低于120 km/h时,需求接触力要求趋于F0=70 N;当列车速度范围为120-200 km/h,平均需求接触压力Fn为(60,0.00047V2+90];当列车速度范围为250-350 km/h,平均需求接触压力Fn≤0.00097V2+70。
系统通过碳滑板下方压力传感器进行碳滑板受到下方机械四连杆的支撑力Fs,并且经由加速度传感器进行碳滑板加速度值a的测定,同时明确碳滑板的质量为m。于是可以算得实际接触压力为F=Fs+ma。
同时系统时刻对受电弓气囊气压进行检测以监测是否因为输入气压不足或是气囊物理破损导致气囊气压小于要求值,此现象经过反复检测依旧存在,将信息反馈于控制系统进行故障降弓处理。
3.1 模糊控制结构
模糊控制结构如图3所示,其由模糊化、推理机、规则库以及反模糊化等模块组成。由此本论文所设计的受电弓主动控制系统核心部件为控制器的设计,其包括模糊规则、模糊化与反模糊化方法、模糊变量输入输出变量论域等方面的设计工作;模糊规则选取包括语言变量设定、语言值隶属度设计和构建模糊推理规则等[5]。

图3 模糊控制系统结构
3.2 模糊控制器的输入输出
本系统的模糊控制部分以机车当下接触压力偏差偏差e(t)=Fn(t)—F(t)和接触力偏差变化率de(t)/dt作为控制器输入变量,以气囊气压要求作为控制器的输出变量P(t),其数值为充排气电空阀线圈得电时间。依据现场设备应用经验,接触压力e(t)的论域取为[-200 200]N,偏差变化率论域取为[-2000 2000]N/s,P(t)论域取为[-2,2]s,其中正值为充气状态,负值为排气状态。
3.3 输入输出量模糊化
根据模糊控制系统自身构造特征,输入输出变量值域以贴合人类非具体数值的语言表达形式,类似于“极大”、“大”、“小”等定性描述。以此为依据对本论文中的接触力偏差以及偏差变化率设定了相同的语言值域,也即T(e)=T(de)={负大,负小,零,正小,正大},对输出变量P(t)设定为{负大,负小,零,正小,正大}。各自语言值对应上文所提的数值连续论域,并以三角形隶属度曲线表达其中的关系,图4和图5分别表达了e, de及P的隶属度曲线。

图4 输入量E和de的隶属度函数
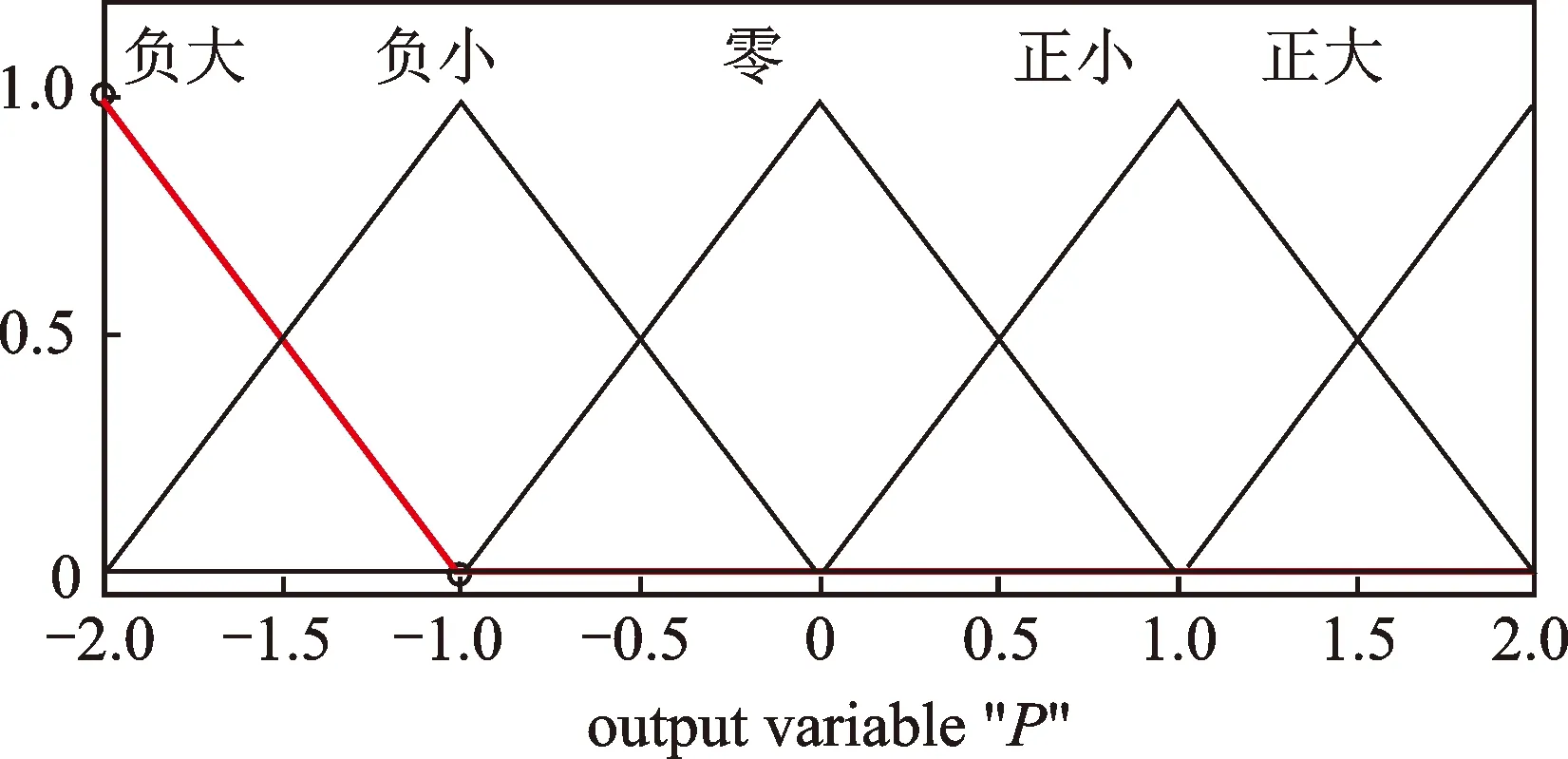
图5 输出量P的隶属度函数
3.4 控制规则表
该模糊控制系统的推理知识库设置遵循以下要求:①当接触力误差较大时,输出控制量的数值选择以消除误差为目标;②当误差较小时,输出控制量的数值选取以保持系统稳定状态为目标。基于以上要求并结合现场应用经验设计了如表1所示的模糊推理规则表。

表1 模糊推理规则表
通过以上控制规则建立以及输入输出论域隶属度化后,在MATLAB进行观察规则视图如图6所示。

图6 模糊控制规则视图
3.5 输出量反模糊化
经过模糊控制系统得到的气囊充排气时间P是语言值,在实际应用中必须要转化成实际的充排气时间数值,系统以该值为标准通过气压传感器实时检测当下气压从而有序地控制充排气电磁阀工作进而让弓网接触力能够匹配当下速度要求。本设计采用较为简单可靠的重心法进行充排气时间数值确定。
4 结 论
本论文旨在设计根据列车当下速度,结合弓网耦合时下的实际接触力参数并通过所设计的模糊控制系统进行接触力优化,同时考虑了由于现有受电弓结构自身缺陷加入了气囊实时检测环节以达到对弓网耦合系统的稳定运行,能够满足列车在各个运行速度下的受电弓接触力目标要求,提高受电弓的受流稳定性。