再生制动能量回收研究综述
2021-08-03马什鹏张刘锋马永娟黄学江张鑫新
马什鹏 张刘锋 马永娟 黄学江 张鑫新
(重庆交通大学机电与车辆工程学院,重庆400074)
主题词:制动意图 制动力分配 动态协调
缩略语
EEG Electroencephalographic
X-B-Wire Drive-By-Wire
SOC State Of Charge
GA Genetic Algorithm
EHB Electronic Hydraulic Brake
1 前言
目前,世界各大汽车企业都致力于开发电动汽车来实现节能减排,在当前电动汽车电池储能技术没有重大突破的情况下,通过再生制动系统回收电动汽车的制动能量可以提高电动汽车的能量利用率,实现汽车的节能减排[1]。
驾驶员制动意图识别、制动力分配和制动动态协调控制直接影响了电动汽车再生制动过程的操控性、安全舒适性和经济性。在已经确定制动需求功率的情况下,再生制动研究的核心是在制动安全的前提下如何合理分配机械摩擦制动力和电机制动力,即制动力分配控制策略,但在不确定制动力需求功率的情况下,往往需要对驾驶员的每一时刻的制动意图进行准确识别,通过制动意图识别来判断整车的制动需求,即制动意图的识别。
针对制动过程中出现的问题,当制动模式发生切换时,因为多个制动系统的动态响应速度不同,会造成短时间内制动需求转矩不足,从而会发生制动波动,产生不同的制动感觉,可通过制定适当的制动动态协调控制策略达到消除制动波动的目的,即制动动态协调控制策略。
本文主要针对在未知制动需求功率的制动意图识别、在已知制动需求功率的制动力分配策略和尽可能的消除制动波动的制动动态协调控制策略方面进行分析和总结。
2 驾驶员制动意图识别
制动意图识别是指在未知制动需求功率时,根据制动时车辆状态对驾驶员的制动意图进行识别。制动意图识别直接决定能否合理地判断当前整车的制动强度,进而影响电机和机械制动的制动力的分配,最终影响整车的再生制动能量回收的效果及整车的制动性。根据识别研究对象的不同,制动意图识别可分为基于驾驶员神经生理学特征的制动意图识别和基于制动踏板识别的制动意图识别。
2.1 基于驾驶员神经生理的制动意图识别
基于驾驶员神经生理的制动意图识别是指根据驾驶员的行为反应前的脑信号来识别制动意图,需要收集大量驾驶员在各种工况下的脑信号,并且对其进行分类分析。文献[2]开发了模拟驾驶环境来研究在不同驾驶情况下紧急制动的神经关联,并测量了模拟驾驶过程中的脑电图(EEG)和肌电信号,提出了1种基于神经生理和肌肉信号的制动意图识别方法,该方法能够在紧急制动的情况下,基于驾驶员行为反应的脑信号检测到驾驶员的制动意图。文献[3]研究了驾驶员的脑电图(EEG)信号对制动踏板动作的影响,通过驾驶模拟器,收集驾驶员在紧急制动时的脑电图,并利用支持向量机和神经网络算法对脑电图进行分类,从而达到紧急制动意图识别的效果。
基于驾驶员神经生理的制动意图识别,能够较准确的识别驾驶员的紧急制动意图,但对于正常制动时的识别研究较浅,并且对脑信号提取较复杂,需要在驾驶员的头部安装一些传感器,成本高、使用价值较低。
2.2 基于制动踏板研究的制动意图识别
针对制动踏板研究的制动意图识别方法是指以制动踏板的状态为研究对象,通过提取、分析在各种制动工况下的踏板行程或者踏板变化率来达到制动意图识别的效果。针对制动踏板研究的制动意图识别方法可分为神经网络识别、模糊识别、隐马尔科夫模型识别。
2.2.1 神经网络识别
神经网络通过输入制动意图的特征参数,使用大量的样本,通过特定的算法训练达到一定的精度后,便可以准确地输出制动意图。但此方法工作量大、数据不具备普适性原则、收敛速度慢的问题制约神经网络广泛应用于制动意图识别。文献[4]利用多传感器数据融合,使用神经网络对制动意图进行识别,能够精确的识别常规减速、紧急制动的工况。
2.2.2 模糊识别
模糊识别可以对未知模型或不能确定的模型运用模糊规则进行推理,运用人的先验经验对不易建模的系统运用数学语言进行有效控制[5]。模糊识别方法具有稳定性好、抗干扰能力强的优点,但其存在较多的人为主观因素,进而导致对于一些精度要求较高的车辆模型,往往达不到实际控制要求。文献[6]用模糊识别方法对驾驶员的制动意图进行识别,相较于神经网络识别方法,减少了对所需数据样本集的大小和准确性的依赖,但需要准确的模糊控制规则。
2.2.3 隐马尔科夫模型识别
隐马尔科夫模型是一种特殊的动态贝叶斯网络模型,具有较强地处理时间序列数据的能力,可以描述各状态间相互转移的马尔科夫随机过程,同时还可以描述各观测变量和状态之间统计关系的随机过程[7]。
隐马尔科夫模型识别具有控制效果会因样本量的增多而变好的优点,但收集大量的样本需要很大的工作量[8]。此外,隐马尔科夫模型使用累积输出概率最大的状态序列来识别制动意图时,还是会忽略较小概率事件的发生,从而导致识别精度不够准确。文献[9]基于隐形马尔科夫理论建立了制动驾驶意图辨识模型,并进行了再生制动力和液压制动力施加与司机制动意图一致性试验。
为了更进一步提高制动识别效果,文献[10]建立隐马尔科夫模型对制动意图进行识别,并且结合自适应神经网络推理的人工智能算法弥补了其对于分类能力不足的缺点,从而更加准确地对驾驶员的制动意图进行识别。
3 制动力分配策略
制动能量回收阶段主要包括加速踏板释放阶段的能量回收、制动踏板下压阶段的制动能量回收以及加速踏板和制动踏板都被释放阶段的能量回收,3个阶段的制动力分配策略是每个制动回收阶段的关键。大部分的研究只考虑到了制动踏板下压阶段的制动能量回收,相比较考虑加速踏板释放阶段的能量回收,制动回收能量较低。根据是否考虑加速踏板的状态,制动力分配策略的研究分为考虑加速踏板状态的制动力分配策略和未考虑加速踏板状态的制动力分配策略。
3.1 考虑加速踏板状态的制动力分配策略
考虑到加速踏板释放阶段的能量回收,需要对驾驶员针对加速踏板的操作意图进行识别,即是驱动意图还是制动意图,文献[11]把驾驶员制动过程分为释放油门踏板阶段和踩下制动踏板阶段。其中对加速踏板释放制动阶段,提出一种基于自适应模糊控制算法的单踏板再生制动控制策略,减少了制动踏板的使用频率,有效地回收了能量;对于踩下制动踏板阶段,提出基于神经网络控制的控制策略,在回收能量的同时保证了制动稳定性。文献[12]提出加速踏板释放阶段的模糊控制策略,并针对制动踏板下压阶段提出基于联合国欧洲经济委员会汽车(Economic Commission of Europe,ECE)法规的制动力分配策略,最后与只考虑制动踏板下压阶段的制动力分配策略进行仿真比较,考虑加速踏板阶段制动能量回收的制动回收控制策略具有更高的回收效率。
3.2 未考虑加速踏板状态的制动力分配策略
未考虑加速踏板释放的能量回收,以摩擦制动力和电机制动力的分配方式为标准,分为理想制动力分配策略、固定比例制动力分配策略、最优能量回收控制策略、基于ECE法规、I线和f线的制动力分配策略、基于模型预测控制的制动力分配策略和基于智能算法的制动力分配策略,其思维导图如图1所示。
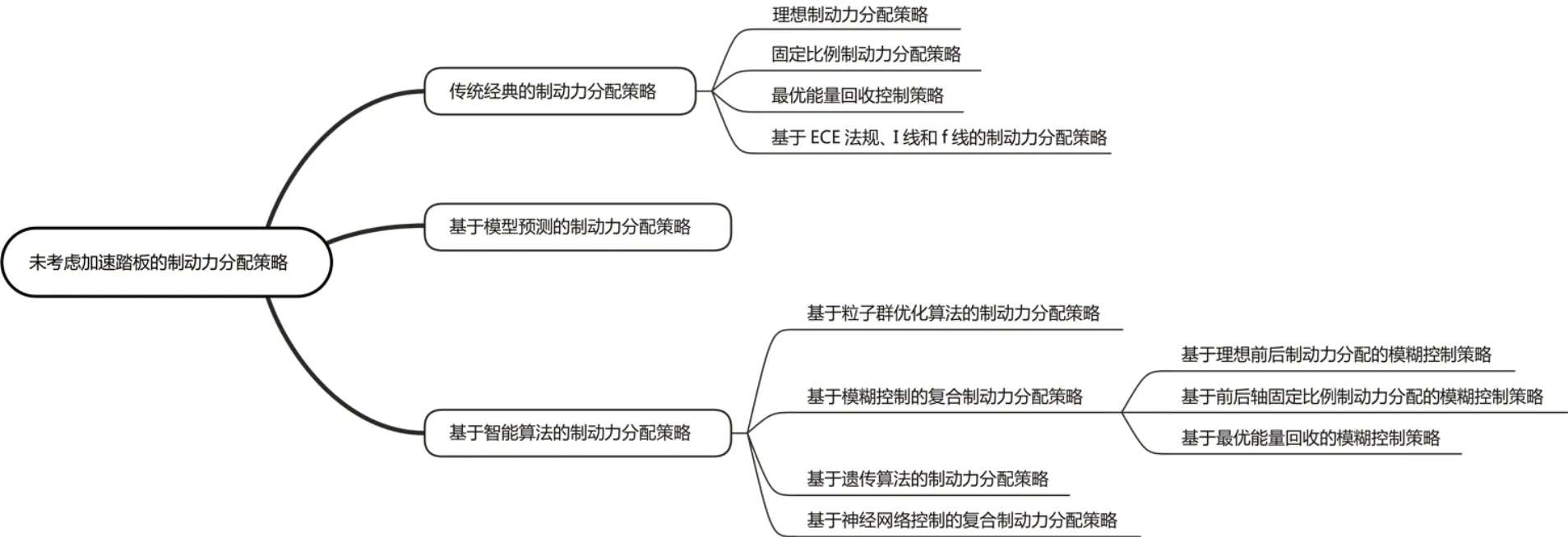
图1 未考虑加速踏板的制动力分配策略
3.2.1 理想制动力分配策略
理想制动分配策略是电动汽车前后轴制动力按照I曲线分配,在确保制动效能的前提下尽可能大的进行制动能量回收,具有最优制动效能的优点,但对控制要求较高,较难实现。文献[13]提出了理想制动力分配策略。根据电机特性、车速、驾驶员意图减速度和地面附着情况来确定前后轮的总制动力矩、再生制动力矩和液压制动力矩。但需要一套能够准确控制液压制动力和再生制动力的线性控制系统,对控制系统的要求较高。文献[14]提出了按照I曲线分配的理想制动力分配策略,合理的对制动力进行了分配。但是没有考虑到电池状态、车辆状态以及传动效率的问题,能量回收的效率较低,并且对于控制系统的要求较高。
文献[15]在X-B-Wire控制系统不断成熟的基础上,提出了1种理想制动力分配下的再生制动控制策略,并通过ADVISOR仿真模拟,结果表明提出的理想制动力分配曲线可以很高的回收制动能量。
3.2.2 前后轴固定比例分配策略
前后轴固定比例分配策略是在原有的传统汽车制动系统的基础上,附加再生制动力,前后轴液压制动力按固定比例进行分配,相比理想制动力分配策略,一定程度上降低了控制要求,更好地发挥了电机的制动能力,使电机尽可能地进行再生制动,制动能量回收效率较高,成本较低,但制动性能较差。文献[16]对采用前后轴固定比例分配策略的电动汽车进行仿真分析,相比理想制动力分配策略,固定比例的制动分配策略具有更高的制动能量回收效率,且成本较低。
3.2.3 最优能量回收控制策略
最优能量回收控制策略是指在保证制动安全的前提下,以最大能量回收为目标,来控制制动力的分配,具有制动能量回收效率高的优点。但需要专门的制动力控制系统来完成,对控制水平要求较高,制造安装工艺较复杂,成本较高。文献[17]提出了一种基于制动强度控制的制动能量回收最优控制策略。采用理论分析与仿真分析相结合的方法,制定包含制动力分配和最优制动强度控制的再生制动能量回收最优控制策略。仿真结果表明,制定的控制策略能较好地回收制动能量。
3.2.4 基于ECE法规、I线和f线的制动力分配策略
相比理想制动力分配策略和最优能量回收控制策略,基于ECE法规、I线和f线的制动力分配策略降低了控制要求[18],较易现实,并且具有较高的制动能量回收效率。文献[19]提出了基于ECE法规、I线和f线的制动力分配策略,并与理想制动力分配策略作比较,仿真模拟验证了所提出的控制策略能更好地提高制动回收效率,但其忽略了电池的安全性问题和路面附着系数的影响。文献[20]针对以往学者们研究仅局限于平直行驶工况的不足,考虑到斜坡对制动能量回收和制动稳定性的影响,在重现定义制动强度的基础上,建立了新的基于ECE法规、I线和f线的制动力分配策略,仿真验证了提出控制策略的有效性。
在考虑路面条件的基础上,文献[21]考虑到电池SOC值、温度等对电机最大再生制动力的影响,提出ECE法规线和f线相交和不相交的前后轴制动力分配策略,保证了制动的安全性,更进一步地提高了再生制动回收的效果,但是未提到如何识别地面附着力的大小。
3.2.5 基于模型预测控制的制动力分配策略
基于模型预测控制的制动力分配策略是指利用模型预测理论作为处理再生制动过程中优化问题多目标多约束的有效方法,用于设计整体制动力矩优化控制器。文献[22]提出了再生制动系统的非线性模型预测控制器,通过分配前、后制动力矩来提高再生能量。但是未提及电机制动和液压制动之间的扭矩分配,严重限制了能量回收的潜在可能性。文献[23]针对四轮驱动电动汽车,通过制动踏板的状态得到制动需求力矩,考虑电池的充电效率和SOC,基于模型预测控制理论制定了前后轮电机和摩擦力矩的制动力分配策略。
基于模型预测控制策略具有制动能量回收效率高,处理多目标、多约束的非线性优化问题的优点[24],但由于其计算的复杂性,并没有在实际中得到应用。
3.2.6 基于智能算法的再生制动力分配策略
基于智能算法的制动力分配策略是指利用某种智能算法处理再生制动的多目标、多约束的非线性问题,将制动协调控制转化为电机和摩擦制动力矩分配问题。根据智能算法的不同,可分为基于模糊控制的复合制动力分配策略、基于神经网络控制的复合制动力分配策略、基于遗传算法的制动力分配策略、基于粒子群优化算法的制动力分配策略。
(1)基于模糊控制的复合制动力分配策略
该策略是指根据车辆行驶状态和专家经验,通过模糊控制器来确定电机制动力或者电机制动力矩的大小,然后结合制定的前后轴制动力分配策略,得到前后轴摩擦制动力和再生制动力的大小,从而实现制动力的分配。
根据前后轴制动力的分配方式不同,分为基于理想前后制动力分配的模糊控制策略、基于前后轴固定比例制动力分配的模糊控制策略、基于最优能量回收的模糊控制策略。
基于理想前后制动力分配的模糊控制策略是指在前后轴理想制动力的分配基础上,考虑多个再生制动影响因素,结合模糊控制器对电机制动力或者电机制动力矩进行精确控制,从而达到制动力分配的效果。文献[25]在理想制动力分配前后轴制动力的基础上,考虑到SOC值、车速、所需总制动力因素,制定了以再生制动力占总制动力比例为输出的模糊控制策略,更好的对制动力进行了分配,提高了制动回收效率。
基于前后轴固定比例制动力分配的模糊控制策略是指基于前后轴按照固定比例分配的原则,结合模糊控制器对再生制动力和机械摩擦制动力进行分配。文献[26]以轮毂电机驱动的电动汽车为研究对象,采用前后轮制动力按固定比例分配,设计了以制动踏板位移量和电池SOC值为输入,电机制动力占总制动力的比例为输出的模糊控制器,采用模糊控制器根据行驶状态更加准确地控制制动力的分配。文献[27]为保证制动安全和稳定性,前后轴制动力分配采用固定比例分配策略,然后考虑到电池SOC、车速和制动需求,制定了以再生制动力占总制动力的比例为输出的模糊控制策略,更进一步提高了制动系统控制精度,提高了制动回收效率。
为了更进一步提高模糊控制器的精度,文献[28]在提出前后轴固定比例再生制动力控制策略的基础上,结合PID算法和模糊控制理论,提出了PID模糊控制算法,进一步提高了控制精度,提高了制动回收效率。文献[29]运用粒子群优化算法进一步对模糊控制规则进行优化,进一步提高了能量回收效率。
基于最优能量回收的模糊控制策略是指基于最优能量回收的制动力分配原则,结合模糊控制器对再生制动力和机械摩擦制动力进行分配。文献[30]设计了以制动踏板位置、SOC值和车速为输入,电机制动力矩比例为输出的模糊控制器,更加精准的对制动力进行了分配,降低了控制的成本。
(2)基于神经网络控制的制动力复合分配策略
该策略是指在制动力分配的基础上,结合神经网络算法对再生制动力矩进行控制,从而提高制动能量回收效率。文献[31]提出基于规则的制动模式切换策略,并在此基础上针对发动机-电机协调制动模式和双电机制动模式,提出基于神经网络算法的制动转矩控制策略,从而使这2种工作效率达到最佳,进一步提高制动能量回收效率。
神经网络算法控制的制动力分配策略具有分类的准确度高、并行分布处理能力强、分布存储和学习能力强、鲁棒性较强的优点,但神经网络需要大量的参数,不能进行观察之间的学习过程,输出结果难以解释,会影响到结果的可信度,学习时间过长,甚至可能达不到学习的目的[32]。
(3)基于遗传算法的制动力分配策略
该策略是指利用遗传算法理论,将制动协调控制转化为利用遗传算法求解电机和液压摩擦制动力矩的全局最优分配问题,从而提高再生制动的能量回收效率。文献[33]把电液制动的协调控制的问题转化为液压力矩和再生制动力矩的全局分配问题。在不同的制动工况下,以制动能量回收效率和制动稳定性为优化目标,采用遗传算法(Genetic Algorithm,GA)得到最优分配系数,并将驾驶员的制动意愿融入权重系数中,实现动态分布。遗传算法的算法具有过程简单、可并行处理,并能得到全局最优解和收敛速度快的优点。但遗传算法的编程实现比较复杂,首先需要对问题进行编码,找到最优解之后还需要对问题进行解码,并且要得要较精确的解需要较多的训练时间[34]。
(4)基于粒子群优化算法的制动力分配策略
基于粒子群优化算法的制动力分配策略是指利用粒子群算法理论,对再生制动过程中制动力进行最优分配,具有较高的制动能量回收效率。文献[35]综合考虑制动感觉、制动能量回收和制动稳定性,采用粒子群优化算法优化得到电液制动力矩的分配比例;在优化制动力分配比的基础上,针对液压制动和电机制动响应不同引起制动感不佳的问题,进一步设计了一种针对液压制动滞后的电机补偿策略,以保证驾驶员获得一致的制动感。
粒子群算法具有所需的代码和参数较少,受所求问题维数的影响较小的优点,但其数学基础相对较为薄弱,目前还缺乏深刻且具有普遍意义的理论分析,在对收敛性分析方面研究还需进一步将确定性向随机性转化。
综上所述,基于智能算法的制动力分配策略能够很好的处理制动过程中制动力分配的非线性问题,但其基于智能算法理论优化得到的控制策略各有千秋,如表1所示,取其之长,补己之短,算法之间结合共同优化制动力分配策略,效果更加理想。
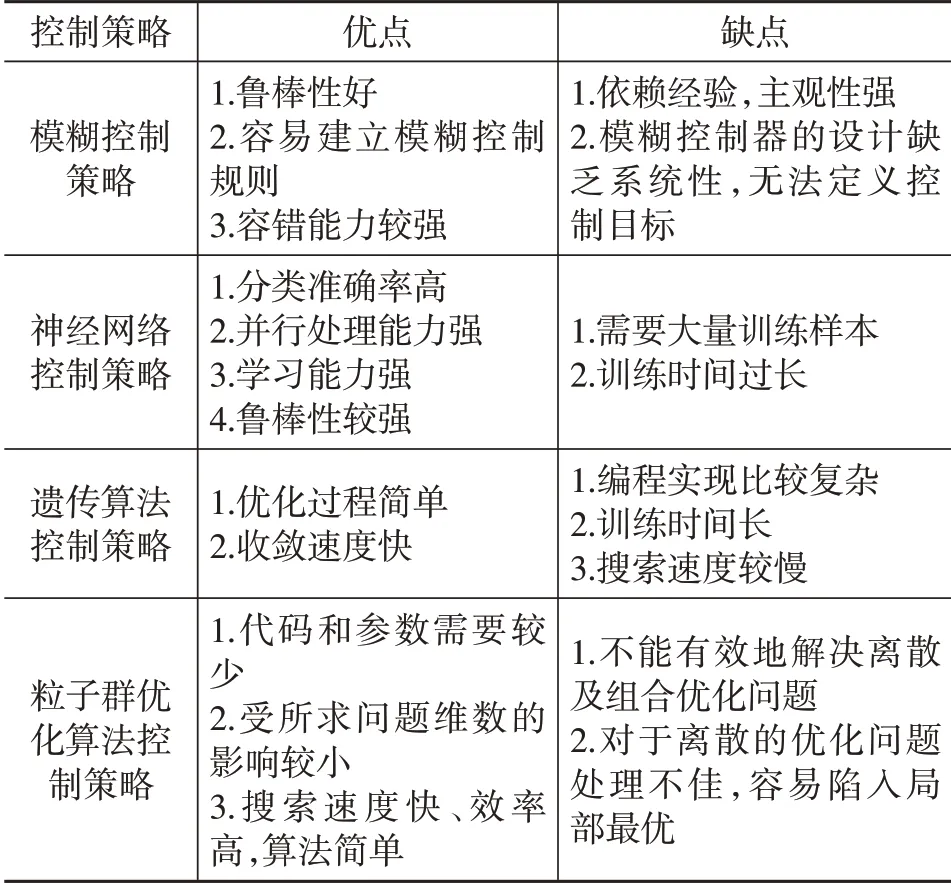
表1 智能控制策略算法优缺点对比分析
4 制动动态协调控制策略
制动动态协调控制策略是指针对多个制动系统动态响应速度的不同引起的制动波动,通过多个制动系统协调控制,从而在制动时尽可能的消除制动波动,保证制动过程的平顺性和舒适性。国内许多学者对制动动态协调控制策略进行了研究,文献[36]针对再生制动力和EHB制动力协调控制问题,在保证制动稳定性和安全性的基础上,采用混杂理论来分析和协调再生制动系统和电控液压制动系统。
文献[37]提出了基于制动力分配修正和电机力补偿的协调控制策略。制动力分配修正是为了在制动强度较大时,电机提供最大制动力,没有补偿能力,此时为了加快液压制动系统响应速度,给予液压制动系统更高的指令,但是当电机没有补偿能力时,给予液压制动系统指令的加强程度难以把握,可能会造成超调的情况,需进一步深入研究。文献[38]针对电机饱和状态没有补偿能力的问题,提出了电机力修正策略,即通过提前调整电机状态,从而使电机保持一定的补偿能力。除此之外,制定了双闭环反馈策略,实时通过电机来补偿制动误差,大幅减小制动力切换时的冲击度,提高车辆制动舒适性,但对电机和电池短时间内的充电能力要求都比较高,需对电机电池的充放电特性进行分析。文献[39]提出给予液压制动系统更大的开启命令,从而缩短开启延迟时间,加快响应速度,但是液压制动系统的启动时间需要精确,且策略结果实用性差,不同的制动系统或者相同的制动系统使用的磨损程度不同都会导致制动系统启动和响应时间的不同,需要一一准确测量,工作量大且测量出的准确度有待检验。
电机制动力由于受到电机转速,温度、变速器档位、离合器结合与否、电池SOC值因素的影响,是一个不确定的值。因此,文献[40]提出了气压补偿控制算法,来动态协调驱动轴上的电机制动力和气压制动力,从而实现客车在制动模式切换时的平稳过渡,提高了制动平顺性。文献[41]制定了液压制动力补偿协调控制策略,实现2个制动源的相互协调工作,以模式切换过程中机械制动系统和电机制动系统的力矩之和满足驾驶员的需求为目标,利用前馈-反馈控制,减小车辆减速度的变化率,保证了车辆制动时的平顺性,但没能考虑到液压制动系统本身响应慢的缺点。文献[42]提出了当液压制动介入时的电机补偿策略和当电机撤销时液压补偿策略,保证了制动时的平顺性,但在电机撤销时的液压制动补偿协调控制阶段,由于液压制动系统具有一定的滞后性,需提前开启液压制动系统,但提前开启的时机难以把握。
国外学者针对制动协调控制策略进行了研究,文献[43]提出前馈控制方法、反馈控制方法以及双闭环控制方法,来调节制动过程中液压以及电机转矩,从而兼顾制动能量回收和制动平顺性。文献[44]借鉴硬盘驱动控制方法,对液压系统和电机系统的响应特性进行校正,使2者响应特性尽可能一致。文献[45]根据电机液压响应特性,使用滤波算法,将需求制动力矩划分为高频和低频部分,高频部分由电机提供,低频部分由液压系统提供。
5 结论
纵览再生制动能量回收技术多年的研究发展,从制动意图识别、制动力分配策略和制动动态协调控制策略3方面进行总结分析。
(1)驾驶员制动意图识别方面主要集中在对驾驶员神经生理和制动踏板的研究,比较针对制动踏板的制动意图识别的研究,驾驶员神经生理的研究需要对脑信号进行精确提取,过程复杂且成本高。
(2)对于制动力分配控制策略,相比较传统的基于规则的制动力分配策略,基于智能算法制动力分配控制策略可以同时兼顾制动能量回收效率、制动稳定性和制动感觉的目标,对需求制动力进行良好分配,是当下研究的热点。
(3)针对复合制动系统动态协调控制的研究,使校正液压和电机系统有相同的响应速度,该策略导致整体的响应速度较慢,制动感觉明显滞后;采用滤波算法,液压提供低频部分,电机提供高频部分,能很好的减小波动,但该策略在某些过渡工况下的控制效果并不理想;采用液压制动系统补偿电机系统,该策略因为液压制动系统本身的滞后性,减少制动波动的效果不理想;通过给予液压制动系统更强的输入液压信号来加快液压制动系统的响应速度的方法,在很大程度上减小了制动模式切换时的制动波动,但是信号加强的时机和程度较难把握。
未来,随着智能化技术的发展,同时兼顾制动能量回收效率、制动稳定性和制动感觉的多目标优化智能算法将加速再生制动能量回收技术的发展,基于智能交通的多车协同再生制动控制的研究也将成为重点的研究课题。