基于卡尔曼滤波的CPCC整车质量估计研究
2021-08-03黄昆
黄昆
(天津经纬恒润科技股份有限公司,天津300385)
主题词:整车质量 云控巡航 卡尔曼滤波 质量估计
缩略语
CC Cruise Control
CPCC Cloud Protocol Cruise Control
ADAS Advanced Driving Assistance System
1 前言
云控巡航系统是一款具有节油特性的货车智能驾驶辅助系统,该系统只有在车辆处于定速巡航(Cruise Control,CC)状态下,才能通过驾驶员的主动激活,在行驶车速基本维持在巡航车速上下10%以内的条件下,通过T-BOX和云端交互数据,控制调节车辆的油门踏板开度和制动力矩,实现货车的最优节油控制,提高货车的经济性。CPCC从ADAS地图数据中,提取道路前方2 km的道路信息,如限速条件、弯道曲率、坡度,结合最优的节油控制算法,控制车辆行驶。
货车在云控巡航的行驶状态下,其状态参数的估计对云端控制策略的制定具有很大影响,其中货车的整车质量[1-3]对发动机输出扭矩、档位选择、速度控制、转弯半径参数具有较大影响。本文设计的整车质量估计器旨在提高货车整车质量的识别精度,为云端反馈较为准确的整车质量。KIM等[4]通过研究汽车的纵向动力学关系并结合最小二乘法,提出了1种整车质量估计的算法;SEBSADJI等[5]利用扩展卡尔曼和龙伯格观测器对车辆的质量和坡度进行估计;雷雨龙等人[6]以纵向动力学模型为基础,运用前向欧拉法将空间模型状态方程离散化,获得方程向量函数的Jacobian矩阵,基于扩展卡尔曼滤波算法对车辆质量进行了估计;胡满江[7]收集了加速度传感器与车轮转速传感器信息,对2者之间的关系进行深入研究,进而求得整车质量,但其仅通过仿真验证对质量估计器进行验证,并未进行道路试验。
在云控巡航开启的最初阶段,为了精确估计货车的整车质量发送云端,并将其作为云端算法控制车辆运行的整车质量参考依据。本文通过对处于云控巡航的货车进行纵向动力学分析,使用卡尔曼滤波设计货车的整车质量估计器[8-9],在云控巡航开启的最初阶段对整车质量进行迭代,进而逼近真实值。使用Simulink仿真设计平台构造质量估计器模型,将其编译成C语言代码嵌入云端,最后通过实车道路试验,设计了5个PCC工况对算法精确性进行验证,结果表明本文设计的PCC质量估计器对货车的整车质量估计具有较高精度。
2 车辆动力学模型
车辆的CPCC(云控巡航模式)是在CC基础上,增加了T-BOX和云端的信息交互,通过云端控制调节车辆的行驶速度(CC定速上下波动10%以内)以达到车辆节油目的。定义货车质量估计的行驶工况为长直道且前方道路畅通,无其他外部因素影响,因此在动力学模型建模[10-13]的过程中,仅需考虑滚动阻力、空气阻力和坡度阻力,可以忽略加速阻力的影响。货车的受力分析如图1所示。
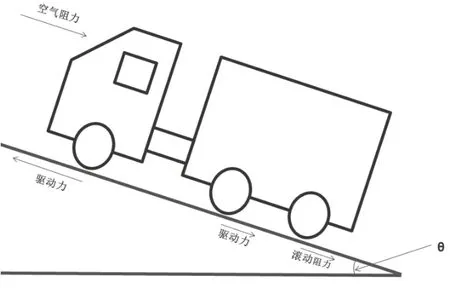
图1 车辆受力分析
在设定的CPCC货车行驶工况下,根据牛顿第二定律,构建动力学模型。

式(1)中,Ft为驱动力;Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;m为整车质量;a为车辆的加速度。
货车的驱动力(Ft)来源于发动机,经变速器、传动轴、主减速器的动力传递,最终作用于车轮,驱动力(Ft)的计算公式如下:

式(2)中,Ttq为发动机输出的扭矩;ig为变速器传动比;i0为主减速器传动比;ηT为传动系机械效率;r为车轮滚动半径。
货车行驶迎风面在行驶过程中会受到迎风阻力,空气阻力(Fw)的计算公式如下:

式(3)中,Cd为空气阻力系数;A为迎风面积;ρ为空气密度;v为车速。
货车在行驶的过程中,由于重力的影响会与地面产生滚动摩擦力,滚动阻力(Ff)的计算公式如式(4)。

式(4)中,f为滚动阻力系数;g为重力加速度;θ为坡度角。

综上,可得式(6)。

3 卡尔曼滤波算法实现
本文通过卡尔曼滤波算法对整车质量进行估计。卡尔曼滤波算法包括2个更新过程:时间更新和状态更新[14-15]。时间更新以上一时刻状态空间和误差协方差估计值为参考,对这一时刻状态空间和误差协方差进行先验估计;状态更新包括卡尔曼增益更新方程、状态变量更新方程和误差估计协方差的更新方程,它结合观测结果和先验状态估计结果对状态进行卡尔曼增益更新、后验状态更新和后验误差估计更新。算法递归进行,只需获得上一时刻状态变量的估计值和当前状态变量的测量值即可获得当前状态变量的估计值。其算法流程图如图2所示。
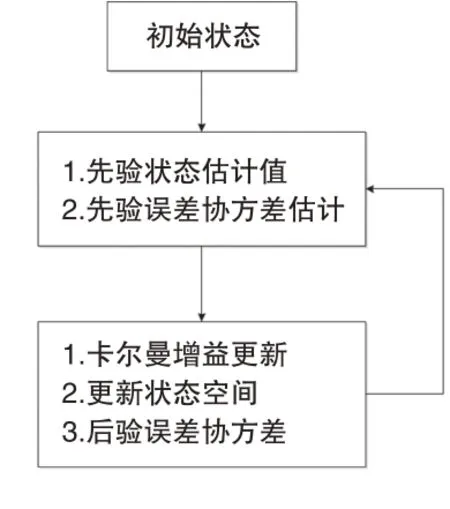
图2 算法流程
3.1 时间更新
时间更新包括先验状态空间更新方程和先验误差协方差更新方程。
选择车速(v)和整车质量(m)作为状态变量,则系统的状态变量x(t)=[v(t);m(t);i(t)]。其中车辆的整车质量可以看作一个常量,系统的状态方程如式(7)。
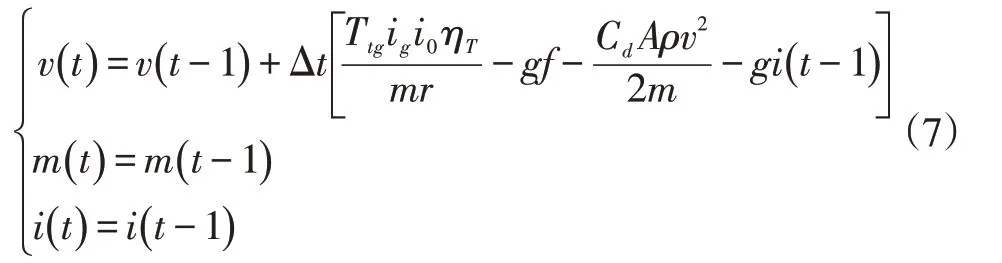
首先要对状态空间进行状态分析,即利用上一时刻系统状态预测下一时刻系统状态。假设现在的系统状态为x(t),根据系统模型,可基于系统上一状态x(t-1)预测现在状态x(t),状态更新方程如公式(8)所示。

式(8)中,x(t)为当前时刻状态;x(t-1)为上一时刻状态;W(t)为过程噪声;矩阵(F)为:

假设现在的系统状态误差协方差矩阵预测值为P_(t),根据系统模型,可以基于系统上一状态的误差协方差预测值P_(t-1)进行递归推算,预测出现在状态的误差协方差矩阵预测值P_(t),误差协方差矩阵预测值更新方程如公式(9)所示。

式(9)中,P_(t)为误差协方差矩阵的预测值;P_(t-1)为上一状态误差协方差矩阵的预测值;Q(t)为噪声协方差矩阵。
系统的观测值,系统的测量方程如式(10):

式(10)中,H为测量矩阵;z(t)为系统的观测矩阵;V(t)为测量噪声。
式(8)和式(10)组成了系统的状态空间表达式,如式(11)所示。

3.2 状态更新
状态更新包括卡尔曼增益更新、状态变量更新和误差估计协方差更新。
卡尔曼增益结合当前时刻的先验误差估计协方差结果和测量噪声协方差结果进行更新,如式(12)所示。状态变量通过卡尔曼增益对观测值和预测值的结果进行权重分配,计算获得更为接近的真实值,如式(13)所示。误差估计协方差通过当前时刻卡尔曼增益和先验误差估计协方差分析进行更新,如式(14)所示。
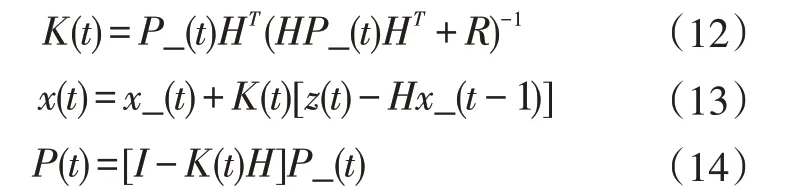
式中,K(t)为卡尔曼增益;P_(t)为系统状态误差协方差矩阵预测值;H为测量矩阵;R为测量噪声协方差矩阵;x(t)为当前时刻系统状态;x_(t)为当前时刻系统状态的预测值;x_(t-1)为上一时刻系统状态的预测值;z(t)为系统的观测矩阵;I为单位矩阵。
4 质量估计器
对于质量估计器,车辆的数据信息由T-BOX输入到云端,在云端系统判定车辆处于云控巡航激活的条件下,对货车的整车质量进行估计。质量估计模型的输入参数包括行驶速度(v)、质量估计(m)、矩阵(F)、卡尔曼增益系数(K),输出为车辆的整车质量(m_all)(质量估计器是基于CPCC工况下的整车质量估计,加速度远小于0.1 m/s2,速度在设定速度上下10%之间浮动)。
矩阵(F)是卡尔曼滤波的一个重要参数矩阵,本文设计质量估计器的矩阵(F)详见第2章,主要输入参数包括发动机输出扭矩(T)、变速器传动比(ig)、主减速器传动比(i0)、传动系机械效率(ηT)、空气阻力系数(Cd)、迎风面积(A)、空气密度(ρ)和滚动阻力系数(f)。
模型的卡尔曼增益(K)的计算涉及到第2章的公式(10)(11)(13),其中,矩阵(F)、测量噪声协方差矩阵(R)和噪声协方差矩阵(Q),MATLABFcn内含误差协方差矩阵(P)的状态更新。
5 CPCC整车质量估计的试验验证
为验证设计的CPCC整车质量估计器的质量估计准确性,选用江淮的一款货车作为CPCC整车质量估计的试验验证车辆[16](图3),其空载质量为3 000 kg,其它车辆参数如表1所示。试验以T-BOX作为车端和云端的数据信息交互载体,T-BOX接受发动机扭矩传感器获取的信息和CAN总线的报文数据信息[17-18],信息数据传递的频率为100 Hz。试验前,需对车辆安装CPCC云控巡航系统和CPCC整车质量估计器,本文使用一汽设计的货车CPCC云控巡航系统,该系统遵循平均油耗量最低原则和平均通过车速等同原则,其控制算法和质量估计器都嵌入到云端。车辆CPCC激活的开关,沿用CC的激活按钮,设定按下一次巡航按钮激活定速巡航,再次按下巡航按钮激活CPCC云控巡航系统。

图3 试验车辆[16]
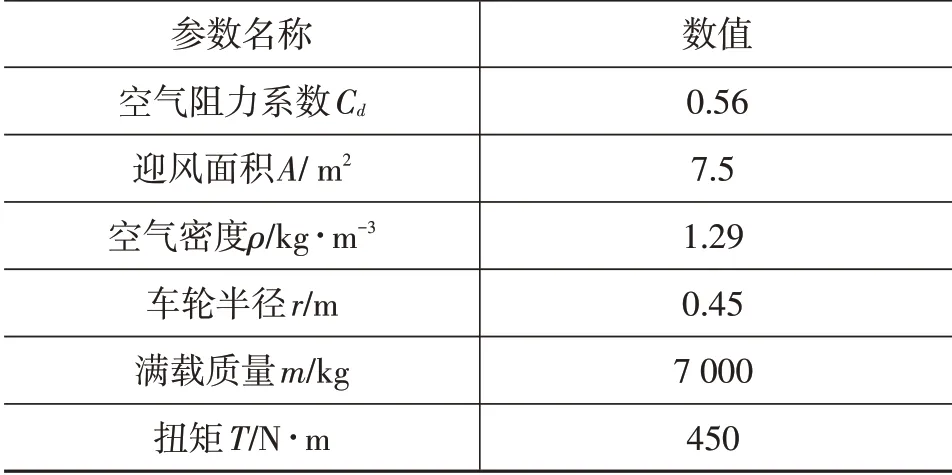
表1 试验车辆参数
为研究上下坡是否对CPCC整车质量估计器的估计结果有影响,结合试验场地条件,设计了3种工况的对比试验:
(1)平路整车质量估计试验;
(2)上坡整车质量估计试验;
(3)下坡整车质量估计试验。
试验道路的高程和云端反馈的最优车速曲线如图4~6所示,3种工况的整车质量估计结果如图7所示。结果表明坡度稳定的上下坡对货车的整车质量估计结果影响很小,几乎可以忽略坡度对整车质量估计结果的影响。

图4 平路整车质量估计试验结果

图7 对比试验结果
为验证CPCC整车质量估计器的准确性,设计5组不同工况对比试验,试验在空旷的试验场场地下展开,前方道路条件良好,无其它车辆影响,试验车辆在CC设定速度为60 km/h的条件下,按下巡航开启按钮,激活车辆的CPCC云控巡航功能,试验开始,系统通过CPCC整车质量估计器对整车质量进行估计。5组工况的整车质量设计如表2所示。
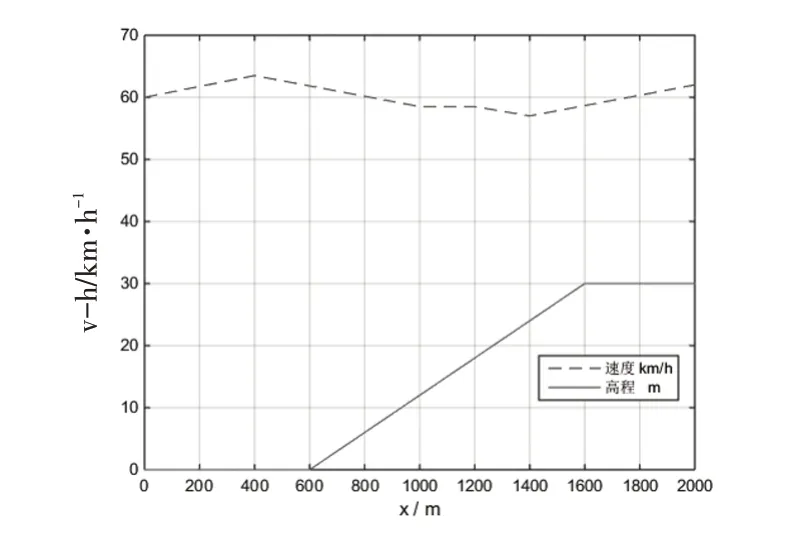
图5 上坡整车质量估计试验结果
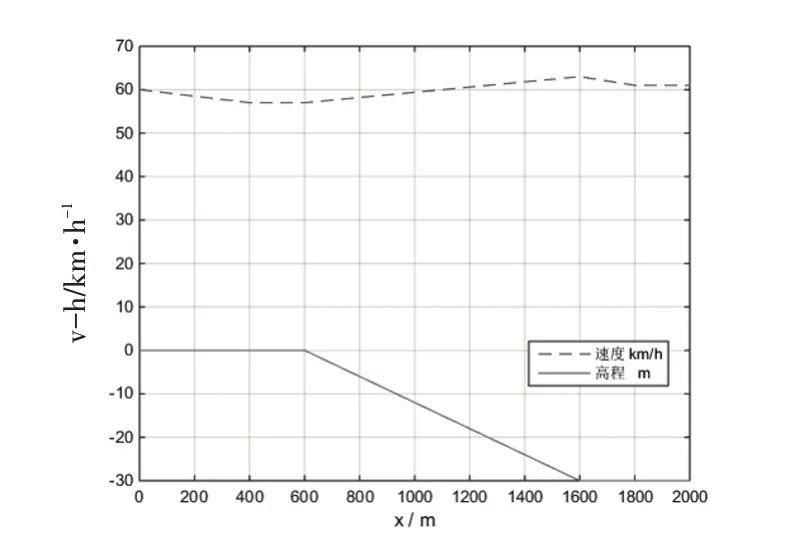
图6 下坡整车质量估计试验结果

表2 整车质量
CPCC整车质量估计器利用卡尔曼滤波对整车质量进行估计,初始质量设置为车辆的空载质量,系统进入CPCC云控巡航激活状态车辆开始进行整车质量估计,随着车端的试验数据不断输入到质量估计器,估计质量由初始的空载质量逐渐逼近真实的整车质量,5组试验的整车质量估计结果如图8~图12所示。
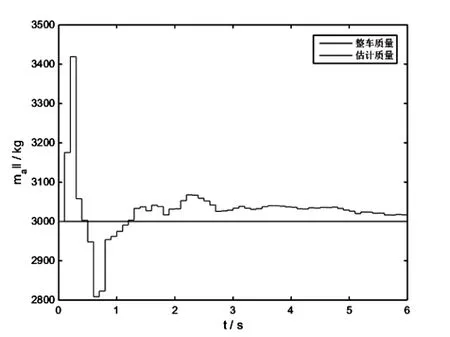
图8 工况1质量估计结果

图12 工况5质量估计结果
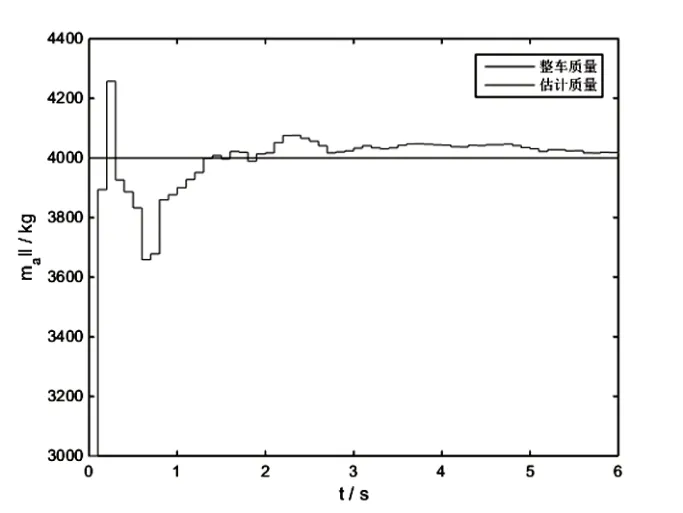
图9 工况2质量估计结果
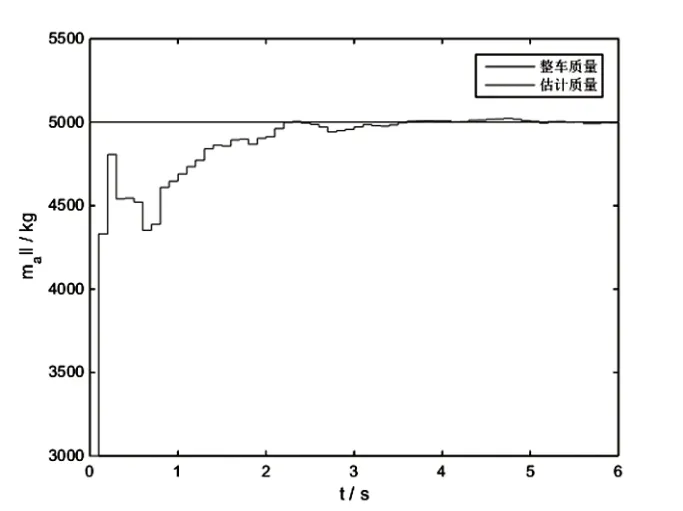
图10 工况3质量估计结果

图11 工况4质量估计结果
对比5种工况下的CPCC整车质量估计结果,发现车辆在工况1和工况2下整车质量估计结果略高于真实值,在工况3下整车质量估计结果几乎与真实值一致,在工况4下整车质量估计结果略高于真实值,在工况5下结果略低于真实值。试验用车的空载质量为3 000 kg,最大载重量为4 000 kg,即最大整车质量为7 000 kg,试验结果表明货车非满载状态下CPCC质量估计器的整车质量估计结果略大于真实值,满载时估计结果略小于真实值,平均误差为0.368 9%,各个工况的误差结果汇总如表3所示。

表3 误差结果
6 结论
(1)本文结合车辆纵向动力学和卡尔曼滤波算法,对CPCC整车质量估计模型进行构建,使用MAT⁃LAB/Simulink实现整车质量估计模型的搭建,然后编译成C语言,将算法嵌入云端,在云控巡航控制激活的条件下,通过云端对货车的整车质量进行估计。
(2)通过对比试验探索坡度对质量估计结果的影响,分别设计了平路整车质量估计、上坡整车质量估计、下坡整车质量估计3种工况的对比试验。结果表明,坡度稳定的上下坡对车辆整车质量估计的结果影响很小,对货车影响可忽略不计。
(3)通过设计整车质量分别为3 000 kg、4 000 kg、5 000 kg、6 000 kg、7 000 kg的货车整车质量估计对比试验,对CPCC整车质量估计器的准确性进行验证,试验结果表明货车非满载状态下CPCC质量估计器的整车质量估计结果略大于真实值,满载时估计结果略小于真实值,平均误差为0.368 9%。
