新能源乘用车驾驶性评价及仿真方法研究
2021-08-03郭丁伊张天强刘元治程健
郭丁伊 张天强 刘元治 程健
(1.中国第一汽车股份有限公司新能源开发院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:新能源汽车 驾驶性 离线仿真 客观评价
1 前言
随着全球环境保护工作的深入和人们环保意识的增强,新能源汽车越来越受到各国政府的重视和消费者的追求。整车控制器(Vehichle Control Unit,VCU)是新能源汽车的核心部件,承担驾驶员转矩解析、转矩分配、能量管理、转矩滤波的重要功能,因此与整车的性能关系密切。
驾驶性是指人-车-环境闭环控制系统中,纵向行驶中驾驶员对车辆响应感觉的舒适程度,主要包括驾驶员易操控性,驾驶过程中驾驶舒适性,驾驶员体感,驾驶员路感。驾驶性的评价方式主要包括主观评价和客观评价[1]。
本文通过对新能源乘用车的驾驶性评价指标的选择、评价模型的建立、仿真方法的研究3方面进行梳理,得出国内外学者及工程师关于驾驶性评价及仿真方法的开展思路。
2 特征指标研究
2.1 VCU功能概述
VCU的主要功能包括行驶控制、能量管理、高压上下电控制、充放电控制、热管理和安全诊断,VCU的功能拓扑如图1所示。其中行驶控制通过识别油门、制动、换挡等驾驶员行为控制发动机、电机等关键总成输出转矩,满足驾驶员行驶意图与加减速预期,与用户感知的动力性、驾驶性、噪声、振动与声振粗糙度(Noise Vibration Harhness,NVH)有着密切关系,而其他功能与整车能耗、动力具备、车辆安全方面有重要联系。

图1 VCU的功能拓扑
因为换挡时机依赖变速箱控制单元进行控制,本文主要讨论的驾驶性限定在与VCU相关功能范围,车型为配备自动变速器的混动车辆以及纯电动汽车。
2.2 特征指标的确定
过去,对车辆的主观评价一方面根据评车师的经验,另一方面是通过与某一款车型进行对标完成。现在,大型整车厂都建立有对标部门供开发工程师完成对标工作,在这一过程中,人们根据经验逐渐形成客观的评价指标,并不断加以积累形成自己的数据库,这是一个较为庞大和系统的工程。下面通过对具体工况和指标的描述确立评价标准,并且对数据采集处理过程进行了探讨。
2.2.1 起动过程
起动过程包括发动机从静止到怠速过程,操作过程是首先关闭电气设备,车辆挂入P档,起动发动机,怠速15 s,分别进行0.5 s内踩油门到30%、50%、70%、100%并立刻松开,等待发动机转速平稳。过程中需要采集的信号有发动机转速、发动机扭矩、加速踏板开度、档位信号,起机工况对应特征指标见表1。

表1 起机对应特征指标
特征指标说明:需要评价发动机响应过程,以及转速跟随加速踏板的响应,怠速平稳所需要的时间,冲击感。这里将转速、转矩平稳时间作为发动机响应评价指标,转速最大、最小差值反应怠速稳定性,通过峰值的变化时间长短与乘员驾驶感觉建立联系。
2.2.2 起步过程
起步过程包括爬行起步、加速起步、坡道起步工况。爬行起步工况操作过程,具备行驶条件的车辆
挂入D/R档,快速松开制动,不踩油门起步;加速起步工况下,快速松开制动踏板,踩加速踏板到10%~100%,每隔10%的开度进行起步操作;坡道起步工况,将车辆置于(8±2)%的坡路上,快松制动,踩加速踏板到20%~80%开度进行起步,起步过程对应特征指标见表2。

表2 起步过程对应特征指标
特征指标说明:起步过程反应车辆起步能力,也是最常见工况之一,这里通过对不同工况,不同加速踏板开度下加速度的大小与变化率以及稳态车速建立时间等观测量的评价建立了特征指标与主观感受之间的联系;另一方面,对于装有离合器的混动车辆,起步过程包含离合器接合,离合器滑磨对车辆纵向冲击有重大影响,本文将加速度的最大、最小差值作为该项评价指标。
2.2.3 加速过程
加速过程反应车辆的动力性,在变道、超车等实际行驶过程中非常重要的性能。对加速过程的评价采取如下步骤:对于混动车辆,变速器挂入1档,以爬行车速行驶,迅速踩下加速踏板到100%,但是不要进入Tip in工况,或者迅速踩加速踏板到20%~80%,每隔10%的开度分别进行测试评价;对于纯电动车辆,采取上述加速踏板开度间隔,测量车辆在这一过程中的加速度和车速变化,加速工况对应特征指标见表3。
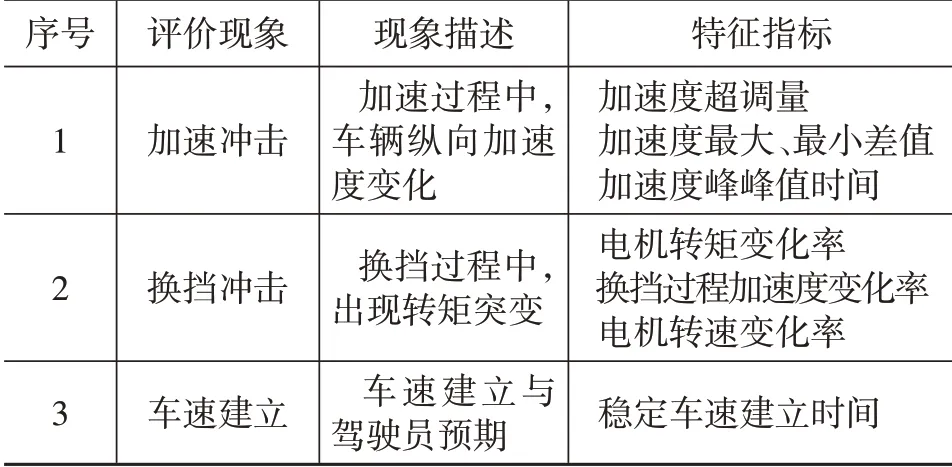
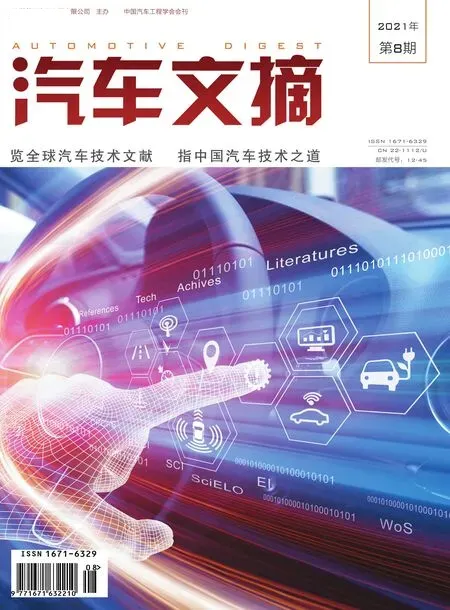
表3 加速对应特征指标
特征指标说明:加速度冲击是纵向加速过程中,驾驶员的主观感觉明显的评价指标。这里选择加速度最大、最小值的差值、加速度超调量、加速度峰值间隔时间作为评价指标。
对于自动变速器的混动车辆,换挡过程中由于齿轮转速不同而存在冲击,这里使用整车加速度和电机转矩、转速变化率作为评价指标。
驾驶员在加速过程中关注最终车速建立时间,时间过慢使得车辆整体表现迟缓,评分较低,所以车速建立时间同样作为评价指标。
2.2.4 匀速过程
匀速行驶过程包括爬行过程不踩加速踏板,观察感受车辆的车速是否稳定和加速度是否有冲击;固定加速踏板开度下的匀速行驶工况,车速从10~100 km/h,每隔10 km/h行驶1 min,观察行驶过程中车速和加速度变化,匀速工况对应特征指标见表4。
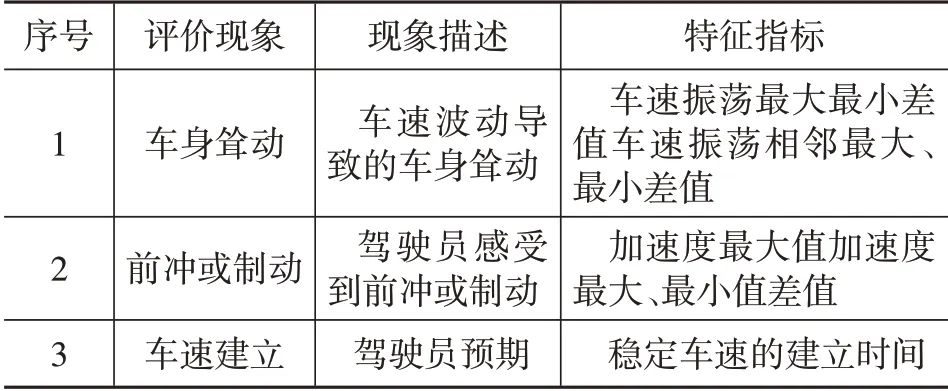
表4 匀速工况对应特征指标
特征指标说明:车身耸动反映了车辆的纵向振动,与驾驶员主观评价关系密切。这里采用车速振荡的差值表征。同时匀速行驶时,由于汽车受到的阻力是实时变化的,所以会存在前冲或非主动制动的情况,用整车加速度表征。加速踏板开度一定,车速最终也会维持在一定范围内,这个车速的建立时间也是非常重要的指标。
2.2.5 Tip in/Tip out
对于混动车辆自动变速器模式和纯电动车辆,从车速30 km/h到120 km/h,每隔10 km/h作为一个基础车速,分别Tip in到加速踏板开度为20%、50%、70%、100%,并保持2 s,Tip out至加速踏板完全松开,Tip in/Tip out工况对应特征指标见表5。
表5 Tip in/Tip out工况对应特征指标
特征指标说明:Tip in/Tip out工况对于新能源车辆要着重考虑,因为电机与传动系间的齿轮间隙会因为驱动和制动的转换而发生冲击,目前实车采取的策略是在靠近零转矩区域,降低转矩变化率的方法减小冲击,同时又想让转矩快速跟随驾驶员需求转矩。所以,此处用加速度最大值30%所用时间作为转矩跟随指标,用加速度最大值、加速度最大、最小值的差值表征冲击。
2.2.6 换档
本文探讨的换档过程包括自动变速器的换档操作、爬行换档、动力升档和滑行降档工况。纯电动汽车的换档控制功能是VCU控制,VCU接收换档器的信号依据换档逻辑实现PRND的变换;混动车辆的换挡由变速器控制单元控制,换档工况对应特征指标见表6。

表6 换档工况对应特征指标
特征指标说明:车辆在静态时,需要评价P→R,→N,N→D,D→N,N→R,R→P,P→D,D→P,R→D,D→R等一系列换档工况,用换档时间评价换档的操控性。在爬行工况下,车速一般维持在5 km/h,这时候需要进行D、R档的反复切换。从车速5 km/h开始,分别踩加速踏板10%~100%,保持加速踏板开度到车速稳定。保持最高档120 km/h车速以滑行方式减速,通过纵向换挡冲击评价动力升档品质。
2.3 采集数据的处理
试验过程中,由于振动、路面不平、环境噪声等因素使得数据并不可靠,影响对指标的判定。
清华大学的陈浩[2]判断汽车本身的加速度是低频信号,而汽车的振动噪声属于高频信号,通过一阶低通滤波器除掉高频成分,完成对加速度信号的处理(加速度信号滤波对比如图2)。

图2 加速度信号滤波对比
同济大学的刘海江[3]通过选取合适的小波基函数和阈值规则,由多个指标构造的复合值确定小波去噪的分解层数,实现了对加速度信号的去噪(不同分解层数下小波去噪后加速度曲线如图3)。

图3 不同分解层数下小波去噪后加速度曲线
综上,对信号的处理可以兼顾处理灵活性和有效性,采用合适的滤波算法。
3 评估体系模型建立
通过统计学原理建立的主观评价与客观特征指标的模型,构建类似于实际驾驶员的评价体系,将试验得到的样本数据进行处理,对车辆的驾驶性进行预测和评价。
刘普辉[4]基于层次分析法,建立了驾驶性评价体系,分为全负荷响应、部分负荷响应、加速踏板感觉、换挡平顺性、瞬态响应等准则层,各个准则层又按照指标层分为全负荷加速度响应等具体指标,在此基础上按照人对事物的认知强弱程度制定了相应的模糊规则,将模糊层次分析法和模糊综合评判方法结合,通过模糊一致判断矩阵计算各指标权重(驾驶性主观评价雷达图如图4)。

图4 驾驶性主观评价雷达图
黄伟[5]等首先建立宏观指标层和微观指标层,宏观指标层包括纵向响应特性,纵向平顺特性,纵向稳态特性,纵向响应特性微观指标包括响应时间、响应延迟等,纵向平顺特性微观指标包括松制动冲击,喘振等,纵向稳态车速微观指标包括稳车速时间。依据Smart原则建立评价体系,运用网络层次分析法和组合熵的优化权重模型对指标权重进行估算。
胡月[6]通过相关性原理分析主观评价得分和客观评价指标的相关性;通过多元线性回归原理,建立多元线性回归方程,搭建了多元线性回归预测模型;针对换档、起步工况建立BP神经网络预测模型,包括输入输出神经元个数、传递函数与训练算法、训练样本等要素,对测试样本进行驾驶性预测。结果表明BP神经网络预测模型的准确性优于多元线性回归模型(BP神经网络预测模型如图5)。
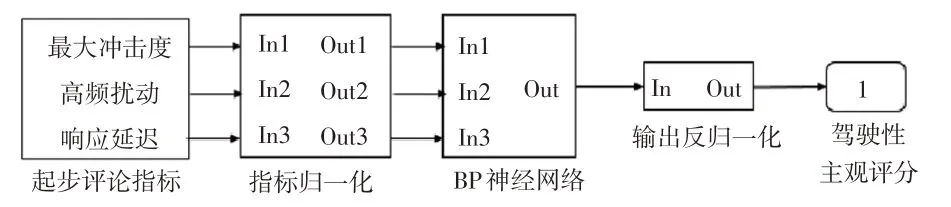
图5 BP神经网络预测模型
Pickering[7]将主观评价指标与车辆的试验数据进行线性回归计算,得到了客观参数与评价指标的回归模型,提出了驾驶性的评估模型。
AVL公司推出的驾驶性客观评价工具AVLDRIVE,在主机厂得到广泛应用,该系统包括了硬件设备与专家数据库[8]。测试设备包括布置在车上的各种传感器及组件[9]。软件系统包括各种车型的数据,利用神经网络等评价方法,经过计算指标与权重给出评分[10-11](AVL-DRIVE驾驶性评价系统如图6)。

图6 AVL-DRIVE驾驶性评价系统[8]
4 整车驾驶性仿真方法研究
现有的车辆动力学商业软件包括AVL Cruise可以对汽车进行稳态性能分析和验证,如动力性、经济性、排放性;Carsim软件包含基于稳态特性的发动机模型,可以进行加速、制动、操纵性等方面验证;Tes⁃isVedynare动力传动模型,基于集中质量建模,主要包含离合器组件模型,传动轴模型,车轮模型。
以上使用较为广泛的商业软件多基于稳态负载特性进行建模,无法模拟车辆受到的激励,对传动系包括发动机悬置没有建立仿真过程,无法模拟瞬态的驾驶性变化,也就无法对相应工况进行模拟。
针对商业模型存在的不足之处,有学者在该工作上付出了努力。吉林大学的徐亮博士[12],基于示功图对发动机准瞬态实时模型进行研究,建立发动机燃烧压力模型,发动机悬置功能部件动态模型,同时建立发动机虚拟电控系统以及动力传动系统模型,最后通过滑行工况、换档工况的仿真与实车进行对比,得出该模型可以明显提升对汽车瞬态的仿真能力。
长安汽车股份有限公司的曾浩[13]等利用GTSUITE对乘用车驾驶性进行仿真和评价。首先建立主观评价和客观仿真之间的对应关系,接下来建立包含转矩控制模型、发动机瞬态模型、驾驶员模块、变速器控制模块以及整车模块在内的仿真模型。通过定油门原地起步加速工况和定车速Tip in加速工况进行验证。通过仿真与试验结果对比可知,2者综合误差控制在8%以内,满足整车性能开发要求,不同模式下仿真与实车试验的对比如图7。

图7 3种模式下仿真与实车试验的对比
一汽研发总院[14]利用AVL的工具链进行了驾驶性自动化标定,AVL自动化标定工具链如图8。车辆集成到AVL-PUMA台架控制软件,利用AVL-VSM模拟车轮转速、悬架、空气阻力和驾驶员操作等,利用AVL DRIVE采集信号进行驾驶性评分。该台架的控制软件AVL-CAMEO拥有最高优先级,可以调用CANape配置标定参数,使能VSM进行轮速计算、空气阻力计算、工况配置,同时采集DRIVE的评分。最后通过自动化的标定,大幅提升了效率。

图8 AVL自动化标定工具链
Walters等[15]首先在实车上运用AVL-DRIVE进行实车信号采集和评分,然后通过AVL Cruise建立HEV车型,利用Simulink建立简化的发动机瞬态模型代替Cruise中原来的模型并进行联合仿真,关键的一步在于将实车采集信号和仿真模型的对应信号进行了对比分析,使得发动机和扭矩传递路径的仿真数据与真实数据的匹配度达到90%。
5 结论
综上所述,VCU作为新能源汽车的核心部件,对整车的驾驶性起到至关重要的作用。为了更好的开发VCU行驶功能,节省成本缩短开发时间,需要关注相关的评价和仿真方法。
(1)车辆的主观评价与客观指标研究。该工作的重点是建立主观评价与客观指标的联系,需要通过对标建立相应数据库,并且要对数据进行处理去噪,是一个较为庞大的工程。
(2)评估体系模型建立。目前多数研究者采用的是层次分析法,融入神经网络预测算法和模糊算法,建立工况和指标的对应关系,寻找指标的权重,可以看出好的算法可以较为真实的模拟评车师的经验,客观的评定车辆的品质。
(3)驾驶性仿真方法研究。目前应用较为广泛的商业动力学软件大多是基于稳态模型,可以仿真动力学、操纵性、经济性等特性,但是对于驾驶性的瞬态仿真难以实现。从公开发表的论文来看,仅有AVL、GTSUITE 2项商业软件含有这一功能。还有研究者自行建立动力总成的瞬态模型,和其他商业软件联合仿真。
随着新能源汽车的不断发展,对车辆驾驶性进行自动化的预标定将大大降低成本,提高车辆的动态性能,相信有更多的研究投入到这一领域。