飞机舵机电动负载模拟器非线性干扰补偿控制*
2021-08-02刘晓琳姜梦馨
刘晓琳,姜梦馨
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
0 引言
飞机舵机电动负载模拟器能够在实验室条件下模拟舵机在飞机飞行时所受到的空气铰链力矩以验证其在空气载荷作用下静、动态性能指标,在飞机测试环节中具有重要作用[1-3]。作为一种具有强运动扰动的被动式力伺服控制系统,由于舵机在被测过程中进行主动运动,会使系统产生多余力矩,严重影响系统加载精度。此外,系统传动机构中存在的摩擦及外部扰动,一定程度上会以非线性干扰力矩形式作用于系统中,也会对加载精度产生不良影响。
目前,为了解决飞机舵机电动负载模拟器所存在的非线性干扰问题,文献[4]采用变平衡学习常数的权值调整算法设计小脑模型关节前馈控制器,并在反馈通道以增量式PID辅助控制,抑制多余力矩效果显著。但是,该方法在控制器设计时仅考虑了多余力矩所造成的系统干扰。文献[5]采用遗传算法辨识系统摩擦参数,建立摩擦前馈加变增益PID混合控制器,有效抑制了系统摩擦力矩,但是没有考虑系统外部扰动影响。文献[6]以Takagi-Sugeno模糊模型表征系统摩擦非线性建立非线性系统数学模型,并利用H∞性能准则抑制外部扰动,实现了高精度力矩加载,但是算法较为复杂。上述研究中,大多数研究者在优化设计飞机舵机电动负载模拟器时,仅进行单一非线性干扰因素分析,因此,对系统非线性干扰因素进行全面分析和研究并找出相应的控制策略已成为现在亟待解决的问题。
考虑到反演控制可以简化复杂高阶不确定非线性系统的控制器设计[7];滑模控制对系统不确定性和外部扰动具有完全鲁棒的特性[8];非线性干扰观测器能够对外部扰动进行估计。因此,本文结合LuGre模型,建立摩擦观测器,提出一种基于非线性干扰观测器的新趋近律反演滑模控制。通过反演法进行滑模控制器设计,在抑制多余力矩的同时,对摩擦观测器参数进行在线识别以补偿摩擦干扰,实现系统对非线性干扰的自适应性。通过非线性干扰观测器的设计对外部扰动进行补偿控制。
1 数学模型建立
1.1 系统结构及工作原理
飞机舵机电动负载模拟器结构组成如图1所示。一方面,舵机根据工业控制计算机发出的位置控制信号进行主动运动。另一方面,工业控制计算机根据角度传感器及力矩传感器所传递的舵机角度位置信号及实际加载力矩信号,设置加载位置指令和加载梯度,以此控制电机驱动器驱动电机产生加载力矩,最终通过金属橡胶缓冲弹簧加载到舵机上。
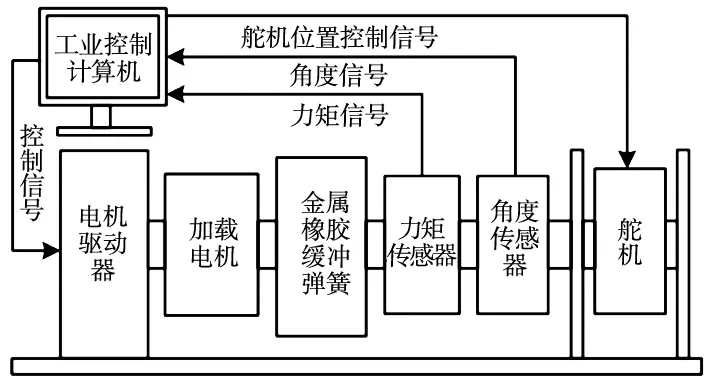
图1 飞机舵机电动负载模拟器结构图
1.2 非线性飞机舵机电动负载模拟器数学模型
在考虑摩擦及外部扰动引起的非线性干扰力矩后,重新建立非线性飞机舵机电动负载模拟器数学模型。
加载电机选择无刷直流电机,其采用电子换相,没有电火花,并具有控制电路简单,成本低、寿命长等优势[9]。通过线性化处理获得电机回路电压方程、电磁转方程、系统动力学方程,即:
(1)
Te=Cmim
(2)

(3)
式中,Um、im、E、Rm、Lm、Ce、Cm、Te、Jm、Bm、ωm、θm分别为电机的电枢电压、电流、反电动势、等效电阻、等效电感、反电动势系数、转矩常数、电磁转矩、转动惯量、阻尼系数、旋转角速度及角位移;TL、Ff、D分别为系统输出力矩、摩擦干扰力矩、外部扰动力矩。
金属橡胶缓冲弹簧可以降低连接刚度,抑制舵机主动运动引起的高频干扰。忽略弹簧质量,加载力矩与电机及舵机间的角位移差成正比,即:
TL=KL(θm-θr)
(4)
式中,KL为金属橡胶缓冲弹簧刚度系数;θr为舵机角位移。
将舵机角位移看作系统扰动输入,则可以将系统加载位置指令与其联系断开,得到系统加载力矩指令,即:
Tc=Kgθcmd
(5)
式中,Tc为系统加载力矩指令;Kg为加载梯度;θcmd为系统加载位置指令。
分析系统工作原理,结合式(1)~式(5),可以得到飞机舵机电动负载模拟器数学模型,如图2所示。

图2 飞机舵机电动负载模拟器数学模型
由此可以推导出系统传递函数,即:
(6)
(7)
由式(6)、式(7)分析可知,系统实际所输出的加载力矩由T1、T2、T3三部分构成,其各自描述了系统加载位置指令、非线性干扰力矩和舵机角位移所产生的系统加载力矩输出。其中,T2、T3的存在严重影响系统加载力矩的输出精度,也使得力矩控制变得困难。因此,抑制多余力矩并减少非线性干扰力矩的影响是控制器设计关键。
为了使控制器设计更为合理,有必要对非线性干扰力矩做出进一步分析以获得更为精确化的系统数学模型。因此,本文建立系统摩擦模型。
飞机舵机电动负载模拟器是一个复杂非线性高阶机电控制系统,摩擦所受影响因素较多[10]。考虑到,LuGre模型综合考虑了摩擦过程中复杂的静、动态特性,充分反映摩擦运动机理,是一个较为完善的摩擦模型[11-12]。因此,本文采用该模型表征系统摩擦力矩,其表达式为[13]:
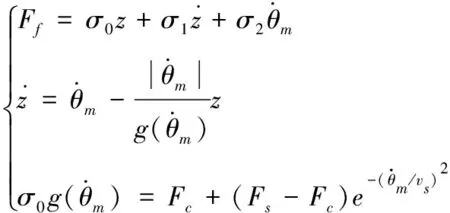
(8)
式中,σ0为摩擦刚性系数;σ1为摩擦阻尼系数;σ2为粘性摩擦系数;Fc为库伦摩擦力矩;Fs为静摩擦力矩;vs为临界StriBeck速度;z为接触面鬃毛的平均形变。
2 控制器设计
飞机舵机电动负载模拟器控制器采用转速、力矩反馈的双闭环结构形式。其中,转速环主要目的是保证电机转速的快速动态响应,故采用纯比例控制。则控制器整体结构设计如图3所示。

图3 飞机舵机电动负载模拟器控制器结构简图

2.1 摩擦观测器设计


(9)
式中,l1、l2为状态观测器补偿量。
则估计误差为:

(10)

(11)

结合式(8)、式(11),则摩擦力矩观测误差ΔFf为:

(12)

2.2 非线性干扰观测器设计
飞机舵机电动负载模拟器所受外部扰动主要以力矩形式D作用于系统执行机构无刷直流电机上,故在转速环中进行非线性干扰观测器补偿控制。考虑到,电机电磁转矩又可以表示为:
Te=Kmum
(13)
式中,Km为um与Te的比例系数,其值可以通过对电机进行辨识实验得到。
结合式(3),系统动力学方程又可以表示为:
(14)
参考文献[14]设计非线性干扰观测器,其数学表达式如下:

(15)

(16)
考虑到与观测器动态特性相比,D、Ff变化缓慢,即:

(17)
则结合式(14)~式(16),可以建立干扰观测误差ΔD的动态方程,即:

(18)
结合式(3)、式(4)及式(13),系统输出力矩TL可以表示为:

(19)
式中,ωr=dθr/dt,为舵机角速度。
则式(19)可以表示为:

(20)
由式(19)和式(20)对比分析可知,采用非线性干扰观测器后,系统输出加载力矩中外部扰动力矩由D减小至ΔD。
2.3 滑模控制设计
设计新趋近律,并采用动态面反演法进行系统滑模控制器设计,同时实现摩擦观测器参数的在线调整。
2.3.1 新趋近律设计
传统滑模控制器多采用等速趋近律[15],其具有如下形式:
(21)
式中,s为滑模切换函数;k0为控制增益,其大小直接影响到达滑模面的时间及系统抖振水平;sgn(s)是关于s的符号函数。
为了减小系统抖振,在式(21)中引入指数项,得到指数趋近律[16],其具有如下形式:
(22)
式中,-k0sgn(s)为等速趋近项;-hs为纯指数趋近项,通常取较小k0值和较大h值以减轻抖振影响。
为了减小抖振幅度,缩短系统收敛时间,在保留式(22)中纯指数趋近项的基础上,对中等速趋近项进行改进,设计新趋近律,为:
(23)
式中,φ(s)=α+βe-χ|s|;k1、β、χ>0;0<α<1。
由于式(22)与式(23)中都包含纯指数趋近项,故仅对除此之外的改进部分进行比较。
为了便于分析,令:
(24)
(25)
(1)抖振分析
式(24)的动态特征可以表现为如下形式:
s0 (k + 1)-s0 (k)= -k0Tsgn(s0 (k))
(26)
式中,T为采样周期。
当切换函数距离滑模面距离足够近时,可以认为s0(k)→0+或者s0(k)→0-,则可以得到:

(27)

ζ0=2k0T
(28)
当切换函数无限趋近于滑模面时,e-χ|s|近似为1,则式(25)的动态特征可以表现为如下形式:
(29)
则可以得到:
(30)

(31)
由式(28)、式(31)对比分析可知,当k0=k1时,只要参数满足以下条件,则ζ1<ζ0。
α+β>1
(32)
(2)趋近时间分析
(33)
式中,s*为切换函数的初始值。
(34)
由于1-e-χ|s1|<1,故
(35)
由式(33)、式(35)对比分析可知,只要参数满足以下条件,则t1<α|s*|/k1 k1χ≫β (36) 因此,由式(22)、式(23)分析可知,与指数趋近律式相比,在新趋近律下,系统的抖振更小,且α+β的值决定了抖振的减小程度,同时切换函数到达滑模面的时间更短。 2.3.2 反演滑模控制设计 定义系统力矩跟踪误差为e,则: e=Tc-TL (37) 设计ω1=ωd-ωm,其中,ω1=u1/Kωp,Kωp为转速环比例系数;ωd为滑模控制输出量。 则结合式(20)、式(37)可以得到: (38) 采用动态面反演法进行滑模控制器设计。 步骤1:定义Lyapunov函数V1,并设计切换函数s。 (39) (40) 采用所设计的新趋近律式(23),结合式(38)、式(40),可以得到: (41) 设计滑模控制输出量ωd控制律为: (42) 结合式(38)~式(42)可以得到: (43) 步骤2:定义Lyapunov函数V2为: (44) 结合式(18)、式(43)和式(44)可以得到: (45) (46) 且由式(17)可以得到: (47) 步骤3: 定义Lyapunov函数V3为: (48) 结合式(12)、式(48)可以得到: (49) 分析式(49),为摩擦观测器参数设计控制律 (50) 此时,结合式(49)、式(10)和式(50)可以得到: (51) 分析式(51),为摩擦观测器补偿量设计控制律为: (52) 结合式(51)、式(52)可以得到: (53) 由式(40)分析可以得到: (54) 为验证所设计飞机舵机电动负载模拟器控制器的控制性能,在MATLAB/Simulink平台搭建系统模型进行仿真实验。其中,系统所受摩擦力矩由LuGre模型获得,其参数设置为:σ0=140、σ1=9.3、σ2=37.2、Fc=21.9、Fs=39.8。 设置非线性干扰观测器增益L=3.2,考虑到与观测器动态特性相比,D变化缓慢,则给定: D=10sin(8πt)+18sin(20πt)+ (55) 式中,rand()的频率设定为0.5 Hz。 得到非线性干扰观测器观测值及其观测误差,如图4所示。 (a) 干扰跟踪曲线 (b) 干扰误差曲线 图4 非线性干扰观测器实验结果图 可以看出,当系统存在外部扰动时,所设计的非线性干扰观测器具有良好的观测能力,其观测误差幅值在0 Nm上下小范围波动,数值较小。因此,观测器可以为滑模控制器提供必要补偿,从而使整个闭环系统具有更好的跟随能力。 为摩擦观测器设置τ0=τ1=τ=45;为滑模控制设置c=400;h=1;k1=130;α=0.1;β=3;χ=2。同时为保证系统控制效果,设置电机转速环比例系数Kωp=15。 舵机工作频率一般为1~20 Hz,实验设定舵机位置信号为幅值1°的正弦信号,并选择5 Hz、12 Hz、20 Hz为其工作频率。系统加载位置指令设定为与舵机同频率、幅值为2°的正弦信号,并选择 50 Nm/°作为加载梯度。实验比较所设计控制器与传统PID控制器对飞机舵机电动负载模拟器的控制效果。其中,加载力矩跟踪效果如图5所示,加载力矩跟踪误差如图6所示,并结合图5、图6给出如表1的定量描述。 (a) 5 Hz加载力矩跟踪曲线 (b) 12 Hz加载力矩跟踪曲线 (c) 20 Hz加载力矩跟踪曲线 (a) 5 Hz加载力矩跟踪误差曲线 (b) 12 Hz加载力矩跟踪误差曲线 (c) 20 Hz加载力矩跟踪误差曲线 表1 力矩加载数据 续表 电动负载模拟器的工作性能指标为指令力矩与实际力矩之间幅差小于10%,相差小于10%[17]。由图5、图6及表2分析可知,在满足系统工作性能指标的基础上,本文所设计的控制器处理摩擦及外部扰动引起的非线性干扰力矩能力更强。虽然随着舵机工作频率的增加,两种控制器部分工作性能都有下降,但是频率为20 Hz时,本文所设计控制器其力矩跟踪曲线幅值差为0.2%,相位差为0.04%,远远小于PID控制,仍然保持较高控制水平,具有更为优异的力矩跟踪能力。 加载位置指令为0°时,系统输出即为多余力矩。则采用两种控制器时系统多余力矩如图7所示。 (a) 5 Hz多余力矩曲线 (b) 12 Hz多余力矩曲线 (c) 20 Hz多余力矩曲线 可以看出,工作频率为5 Hz、12 Hz和20 Hz时,与PID控制器相比,采用本文所设计控制器系统多余力矩明显更小。并且通过进一步分析可知,在三种工作频率下,本文所设计控制器使得系统分别消除约90.5%、75.5%、70.3%的多余力矩,抑制多余力矩效果显著。 针对飞机舵机电动负载模拟器存在多余力矩、摩擦及外部扰动问题,本文提出了一种基于非线性干扰观测器的新趋近律反演滑模控制方法,其具有如下优势: (1)该方法利用LuGre摩擦观测器所估计的摩擦力矩值建立非线性干扰观测器,并通过滑模控制设计,动态调整摩擦观测器参数,最终实现系统对多余力矩、摩擦及外部扰动的自适应性。 (2)该方法中所设计的新趋近律可以有效改善滑模抖振现象,减小系统收敛时间。 (3)该方法能够明显改善非线性干扰对系统的影响,满足形系统实时性要求,显著提高系统力矩跟踪精度。 DOI:10.1007/s11432-019-2681-1.












3 仿真分析
3.1 外部扰动力矩观测实验分析
13sin(5πt-7π/8)+20rand()-10
3.2 加载力矩跟踪实验分析








4 结论
