数字化相控阵天线远场测试系统设计
2021-07-30吴文超贾守波王鹏飞孙阶彪陈光绪
吴文超, 钱 阳*, 贾守波, 王鹏飞,孙阶彪, 陈光绪
(1.上海无线电设备研究所,上海 201108;2.上海神添实业有限公司,上海 201108)
近年来,相控阵雷达技术逐步在众多科技研究领域表现出旺盛的生命力,并已经广泛应用到军用和民用领域,同时,数字技术也取得了迅猛的发展,数字相控阵天线逐渐成为主流军用雷达关键组件。数字相控阵天线因其具备高搜索速率、高多普勒分辨率和角分辨率、高抗干扰能力和同时多功能等优势,正在成为相控阵雷达的一个新的发展方向[1]。
目前,数字相控阵天线测试通常在暗室中进行,通过矢量网络分析仪进行方向图测试[2-3],以获取天线的真实性能。传统数字相控阵天线测试系统采用非标转台等专用机构,测试过程一般为半自动测试,需要人工干预,并且测试软件系统功能相对简单,面对数字化相控阵天线的大量测试任务,测试效率不足已开始阻碍相控阵天线研制与应用进程。
相控阵天线测试需要天线在辐射范围中完成一次运动过程和仪器仪表数据采集过程,运动过程耗时长,较大程度地制约了相控阵天线测试速度。相控阵天线测试效率的提升,关键在于实现多通道、多波束[4]测试以及高效的数据传输、处理过程[5],行业内也在不断研究[6-8]。例如,袁婕[9]、王耀华[10]基于一种层次架构模块化系统,提出了多任务测试功能实现多个频率与波束的测试,但未对测试时序控制进行优化研究,并且系统不包含测试时外围其他模块的控制,实际使用时仍显不足。
提出了一种新型数字化相控阵天线远场测试系统,介绍了相控阵天线的测试系统搭建、测试系统设计、测试方法和时序设计,对测试系统软硬件技术方案进行了详细论述。软件系统是测试系统的关键部分,整个测试系统被划分为总控模块和子模块,子模块可独立运行,通过数据流与总控模块进行通信进而实现控制,测试过程中模块间的调用关系通过配置文件定义。系统具有完整的全自动化测试功能,并且测试过程可通过配置文件进行灵活拓展,具有较好的通用性。通过对测试系统的实测验证表明,本系统能够较大程度地提高测试效率,对相控阵天线的研制和应用具有较大的实际意义。
1 测试系统构成
测试系统布局如图1所示,空间分布有射频子系统、供电子系统、机械子系统、散热子系统和测试控制软件系统。数字化相控阵天线是一种有源相控阵天线,对于有源相控阵天线测试,为了避免相控阵天线TR组件中低噪放工作于饱和状态,即要求处于线性工作状态,通过调整矢量网络分析仪的输出功率,使得系统信噪比达到预期要求。另外,为了相控阵天线姿态控制更加灵活并保证足够的精度,采用六轴工业机器人作为辅助相控阵天线运动的转台。
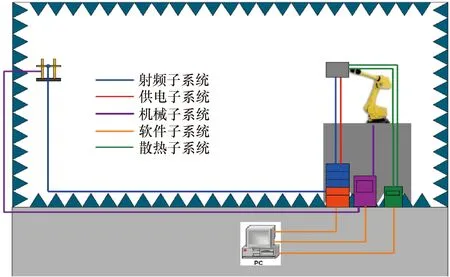
图1 天线测试系统布局示意图
常用的天线测试方法有远场测试、近场测试和紧缩场测试等[11]。论述的数字化相控阵天线测试系统工作在分米波段,这使得远场方向图测试可在暗室中进行,不受外界环境的电磁干扰,而且可以全天候工作,不受天气的影响。
图2是测试系统布局模型示意图。在进行接收信号测量时,为了保证接收(TR)组件的饱和工作状态,需要调整信号强度,将在矢量网络分析仪信号源输出端接入功率放大器,保证扫描架喇叭探头处的辐射信号的电平值满足要求;在进行发射信号测量时,为了保证相控阵天线发射(TR)组件的饱和工作状态,将在矢量网络分析仪信号源输出端接入功率放大器。注意,为了保证器件、仪表不受损坏,矢量网络分析仪接收端以及天线发射端要按需决定是否接入衰减器。
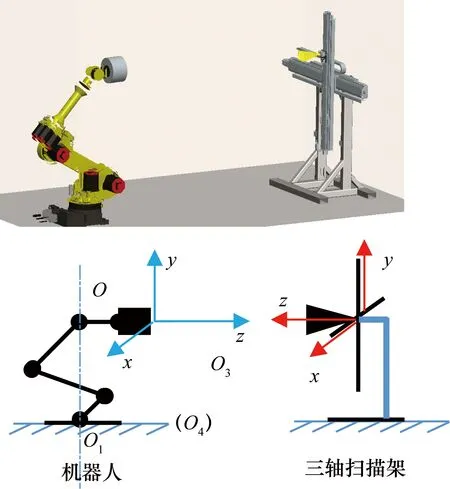
图2 测试系统布局模型示意图
相控阵天线测试系统硬件框图如图3所示,系统主要包括测试工控机、矢量网络分析仪、功率放大器、水冷机、机器人、扫描架、供电电源、串口服务器、网络交换机等设备。
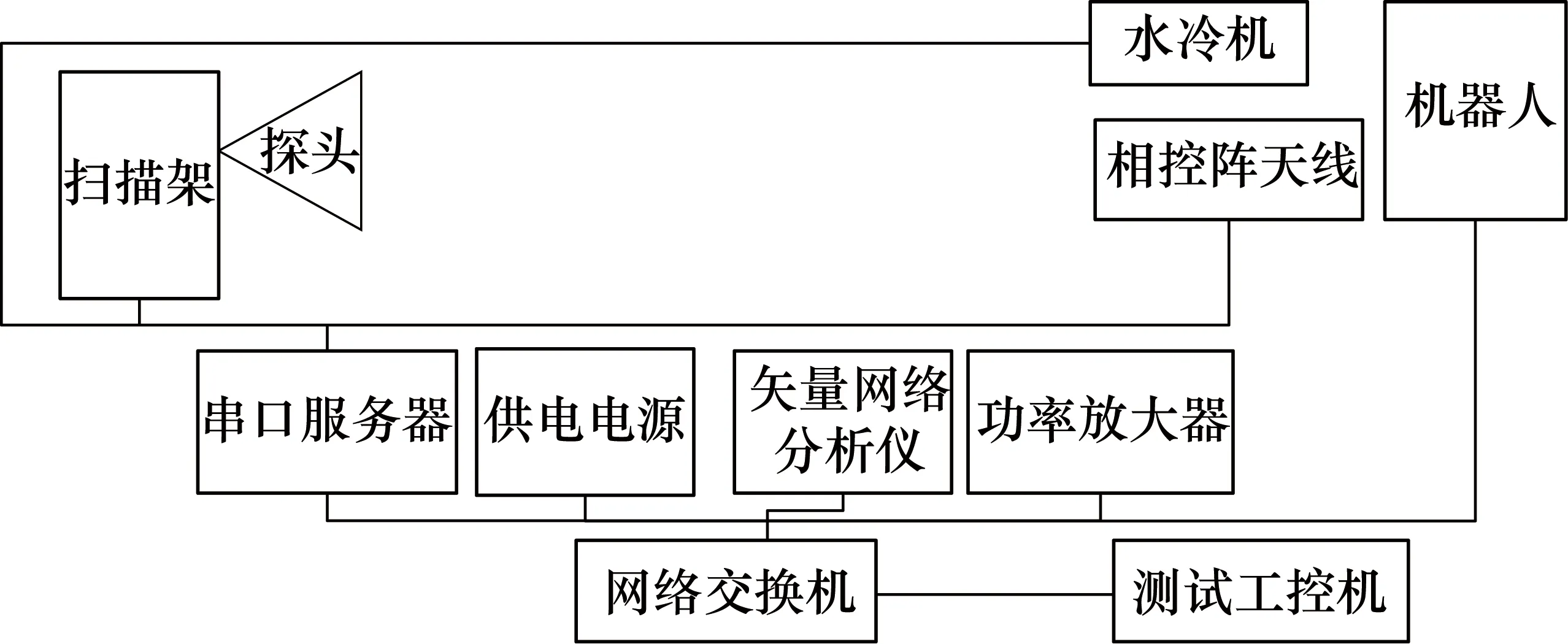
图3 系统硬件框图
2 测试系统设计
在实际的相控阵天线远场测试过程中,天线的测试工艺流程非常复杂,测试任务量也极其巨大。往往需要对天线在不同收发状态下,测试多个频率点、多个波束的方向图。普通的远场测试系统无法满足工程化的测试需求,必须使用可以对天线同时进行多频点、多波束方向图测试的相控阵天线多任务测试系统[9]。多任务天线测试系统的硬件组成更加复杂,软件功能更加强大,通用化程度也更高。
2.1 系统设计
所谓多任务测试系统,是指机器人带动相控阵天线阵面单次扫描预定的方向图角度区间的过程中,可以测试多个频率点、多个波束、多个加权、多个通道的天线方向图。因此,本测试系统必须实现相控阵天线阵面移动、状态切换和测试数据采集的实时同步控制。在进行测试前,测试人员将天线需要测试的所有频率点、波束指向等测试任务信息在测试系统界面进行设置,测试开始后,机械臂每到一个测试点,依次控制天线波控模块切换状态并对矢量网络分析仪进行触发采集,并不断循环直到该点位处天线所有状态的数据都采集完毕,最后通过测试系统处理后实时显示测试过程不同状态时的方向图。
2.2 软件设计
数字化相控阵天线测试系统软件作为整个测试系统所有任务功能的最终体现,是整个测试系统开发的关键。系统软件架构如图4所示。设计上将测试系统切分为若干可独立运行的子模块,以便于子模块同步运行执行任务,同时方便调试开发和拓展。子模块由业务调度模块统一管理,最后由测试系统主控模块进行数据和指令的输入输出。
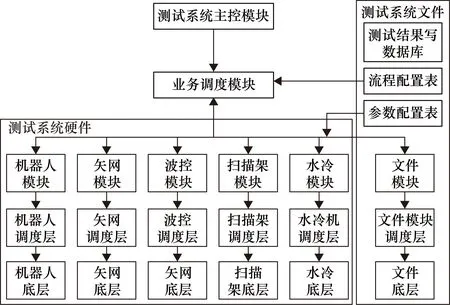
图4 软件设计架构图
系统由主控模块、业务调度模块、机器人模块、矢量网络分析仪模块、波控模块、电源模块、水冷机模块、文件模块等组成。主控模块负责信息输入和输出功能,业务调度模块负责接收主控模块指令,根据流程配置表以及参数配置表生成子模块调度队列调用子模块执行功能。子模块有机器人模块、矢量网络分析仪模块、波控模块、电源模块、扫描架模块、水冷模块和文件模块。机器人模块负责机器人控制和机器人状态获取、矢量网络分析仪模块负责设置矢量网络分析仪参数、触发和读取矢量网络分析仪的测量数据,波控模块负责控制相控阵天线完成信号状态切换,电源模块负责供电电源参数设定和状态监控,扫描架模块负责扫描架运动控制和状态读取,水冷模块负责水冷机参数设置、控制和状态监控,文件模块负责配置文件的读取、保存以及测试数据的保存。软件交互界面如图5所示。
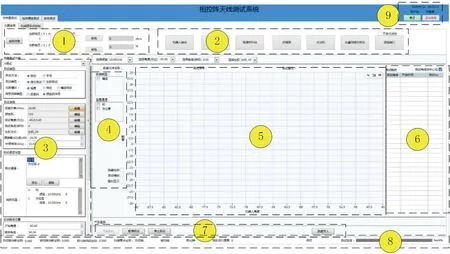
图5 软件交互界面
图5中,软件交互界面共包含9个区域:① 快捷操作及监测区;② 子模块界面操作区;③ 测试参数设置区;④ 测试数据显示选择区;⑤ 测试数据显示区;⑥ 测试点位置耗时显示区;⑦ 测试操作区;⑧ 系统状态栏显示区;⑨ 用户登录区。
3 测试方法
以暗室远场测试为例,给出相控阵天线方向图的测试方法。数字化相控阵天线测试系统通过发送波控指令信号,控制相控阵天线的工作状态,测试过程中控制机器人和扫描架的运动,再由矢量网络分析仪进行测试所用到的信号发生和测试数据的采集,并得到相控阵天线信号的方向图测试结果。
3.1 发射方向图测试
在远场对相控阵天线进行发射方向图测试时,相控阵天线处于发射状态。测试过程中,源信号由矢量网络分析仪产生,经过功率放大器放大后,输送到天线以准备进行发射,信号经过空间传播后通过探头进行接收,再经由衰减器衰减后接入矢量网络分析仪进行采集。测试系统控制机器人和扫描架探头移动到每个测试位置,通过天线的波控模块间接控制天线发送信号的方位角、俯仰角以及信号频率和天线模式,并对矢量网络分析仪采集到的信号进行读取和记录,最终得到天线的发射方向图。
3.2 接收方向图测试
在对天线进行接收方向图测试时,相控阵天线处于接收状态,探头处于发射态。在每个测试位置,测试探头将微波信号向天线阵面辐射。相控阵天线接收信号后通过同轴电缆送给矢量网络分析仪。测试过程中,控制系统控制机器人以及扫描架探头移动到每个测试位置,通过相控阵天线波控模块控制天线接收信号的方位角、俯仰角以及信号频率和天线模式,并对矢量网络分析仪采集到的信号进行读取和记录,最终得到天线的接收方向图。
3.3 具体测试步骤
相控阵天线的发射测试和接收测试具有相同的流程,其测试方法的差异主要在信号回路连接和波控指令上。发射和接收方向图的测试流程相同,如图6所示。
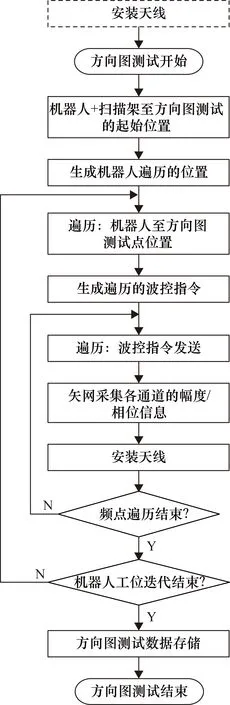
图6 发射/接收方向图测试流程图
3.4 测试时序设计
测试效率是本系统的一个关键指标,系统在测试时应该在满足测试要求的前提下尽可能将子设备的动作时间进行重叠,以7波位单频点测试为例,时序图设计如图7所示。可以较大程度地节省机器人坐标发送时间和波控指令的执行时间,以达到提高测试系统效率的目的。
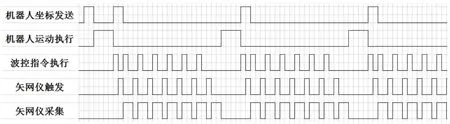
图7 时序图设计
测试开始后,系统执行机器人坐标发送,并控制机器人运动到测试需要的位置,机器人运动到位后,系统执行波控指令,并在波控指令执行完成后将矢量网络分析仪进行触发,触发完成后随即执行下一次波控指令。在机器人运动到位后,系统会同时将下一次测试需要的位置发送给机器人,以节省下一次机器人运动前发送坐标期间的等待时间;在矢量网络分析仪触发完成后,由于矢量网络分析仪已经得到了测试数据,其后进行波控指令执行不会影响已有测试结果,因此在系统从矢量网络分析仪中采集数据的过程中,同时执行下一次波控指令,以节省下一次矢量网络分析仪触发前波控指令的执行时间。
4 测试结果与分析
数字相控阵天线的工作频率范围通常比普通模拟相控阵天线宽很多,其方向图测试任务量也往往数倍于普通天线。因此,多任务测试系统的应用更加具有实用意义。经过大量实验验证可以发现,数字化相控阵天线测试系统能够保证近似的测试精度,并且大范围提高当前相控阵天线测试效率。
4.1 重复测试精度
通过对某型号相控阵天线实际测试为例进行分析,对相控阵天线进行了测试对比,取多个方位波束角、单频点进行测试,其中3次结果的对比如图8所示。
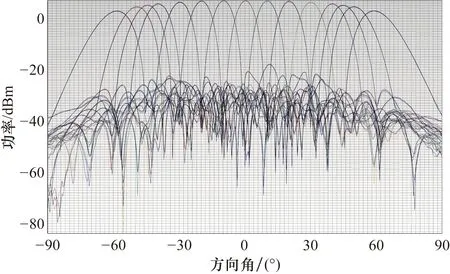
图8 测试重复性对比
由图8中的比对数据可以确认,测试系统方向图重复测试3 dB波束带宽最大差异约为1.2%,副瓣抑制最大差异约为1.5%,测试精度基本一致。
4.2 测试效率
通过对某型号相控阵天线实际测试为例进行分析。相比于市场上已有的同类方案,在不同的测试参数下,效率均有较大提升,最大为60%。具体数据如表1所示。
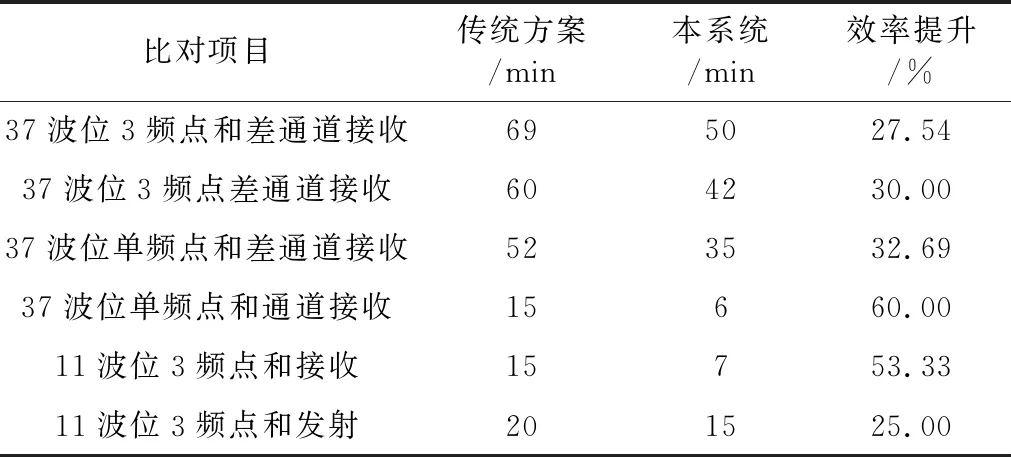
表1 相控阵天线测试系统测试效率对比
5 结束语
本文论述的数字化相控阵天线测试系统集成方案和天线测试方法经过了多个型号、不同频段的数字式相控阵天线实际测试的应用,结果表明天线的测试效率和精度满足相控阵天线的测试要求。这种新型数字化相控阵天线测试系统测试精度较好,有效提升了天线的测试效率,能够推动相控阵天线的研制与应用进程。
