一种基于STM32平台的自动翻页机设计*
2021-07-30陈永佳
李 婉,陈永佳
(陕西国防工业职业技术学院,陕西 西安 710300)
0 引言
自动翻页机是一种能够通过按键或者语音触发,实现自动对书本、画册、乐谱等进行翻页的智能电子产品,应用十分广泛。例如,老旧图书电子化时对书本进行翻页、扫描、文字识别,音乐演奏家在演奏中对乐谱翻页,肢体障碍人群阅读纸质图书时对图书翻页等过程,自动翻页机都起着至关重要的作用[1]。目前,市场上售卖的以及相关文献呈现的自动翻页机,其开发平台主要以51单片机为主,翻页机结构主要由连杆和摩擦块组成,摩擦块直接与纸张接触,通过摩擦力进行翻页。然而大多数老旧图书纸张较脆,摩擦力容易损伤纸张。为了解决以上问题,本文提出了采用气泵连接吸嘴进行翻页的设计结构,该结构主要利用大气压强吸取纸张,避免了摩擦力对纸张的损坏。
翻页机由主控部分和机械结构组成。机械结构部分主要包括弹簧、连杆、滑轨、金属丝等,用于控制纸张的运动[2]。STM32系列单片机作为智能控制家族中的重要成员,深受人们的青睐,其IO口多、寄存器丰富、操作方便、低功耗等特点足以满足现在大多数人对智能电子产品的需求[3]。本文以STM32F103RBT6单片机作为主控,STM32F103RBT6是一种中等容量Flash的单片机[4-5],价格低廉,主要用于控制气泵、步进电机、舵机、红外模块以及L298N驱动等部件,实现对书本的自动翻页功能,既可以进行定时自动翻页,也可以通过触发开关进行翻页。
1 翻页机结构设计
1.1 基本结构
翻页机的基本结构如图1所示,其中1-书本,2-翻页杆,3-吸嘴,4-红外测距模块,5-固定件及连杆,6-微型吸气泵,7-翻页机承载板,8-滑轨固定架,9-滑轨,10-弹簧,11-金属丝,12-弹簧固定架,13-步进电机,14-金属丝卷盘,15-压纸杆,16-舵机固定架,17-红外模块,18-舵机,19-弹簧及其支架,20-压纸杆。以上结构整体由轻质塑料组成,具有质轻、价格低廉、易于批量生产等优点。
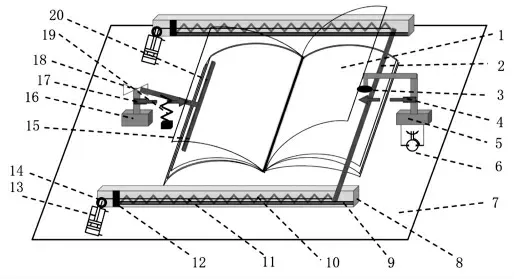
图1 翻页机基本结构
翻页机工作之前,先将书本固定到翻页机承载板上,左边书本用压纸杆压住,右边部分纸张由翻书杆轻微压住,翻书杆压力可通过滑轨进行调节。首先,微型吸气泵的吸嘴将纸张向上吸取,纸张上升经过红外模块的探测头时,系统触发两个步进电机同步转动,步进电机转动时牵引金属丝,使翻书杆克服两个弹簧的弹力向左沿着滑轨移动,同时翻动纸张向左运动。其次,当纸张运动到左边时,会经过左边红外模块的探测头,此时会触发左边的舵机转动,舵机转动会克服左边弹簧的弹力,因此需要选择合适大小的舵机。最后,左边舵机抬起后,纸张运动到左边压纸杆下方,舵机沿反向转动相同角度,回到初始的压纸状态。同时,步进电机也向与之前相反的方向转动同样圈数,在弹簧弹力作用下回到最初位置。通过以上过程,可以完成一次翻页运动,其他翻页过程与以上过程相同。第二、三……次翻页时既可以自动重复以上过程,也可以通过触发一次次完成,触发形式可以设置为踏板、拉线以及语音控制等形式。
1.2 重要组成部件及参数
1.2.1 微型吸气泵
微型吸气泵工作时,内部电机的圆周运动能够带动隔膜做往返运动,使固定容积腔体中的空气被不断压缩和拉伸,降低腔体中的大气压强,进而使内部形成真空。由于大气压力的作用,外部气体会通过吸嘴被压入腔体,纸张也会随之被压到吸嘴处,其结构如图2所示。微型吸气泵能够作为动力装置广泛应用于真空吸附、气体循环和压力控制等方面。
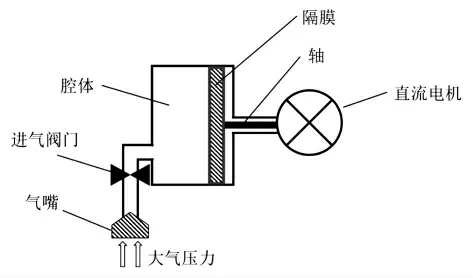
图2 微型吸气泵结构
本设计中真空泵的直流电机选择有刷DC电机,最大流速为5 L/min,最大压强为100 kPa,最大真空度为-55 kPa,工作电压为12 V。由于STM32单片机输出电压较小,在控制微型吸气泵时需要借助驱动板提高输出电压,因此,信号在到达真空泵之前需要先通过L298N驱动板升压。由于两次吸引纸张的间隙时间中吸嘴不能对纸张有吸引力,因此,要采用单独的进气阀门来控制吸嘴处是否产生压力,进气阀门单独由单片机控制。
1.2.2 步进电机
步进电机能够将脉冲信号转化为相应的角位移,即控制脉冲数量可以控制步进电机转过相应的角度,实现对转动角度的精确控制,其结构图如图3所示。本设计中步进电机转子与金属丝卷盘固定相连,步进电机转动可带动卷盘卷动金属丝,牵引翻页杆沿着滑轨向左运动,实现翻页功能。步进电机的参数主要包括拍数K(电机转过一个齿的角度所需要的脉冲数)、步距角β(步进电机通过一个脉冲信号转子齿轮转过的角度)、转速n(单位时间步进电机转子转过的圈数)等。步距角可通过式(1)计算,其中N为齿轮的齿数;步进电机转速n可以通过式(2)确定。本文使用42BYGH34-401A型步进电机控制翻页杆的运动。
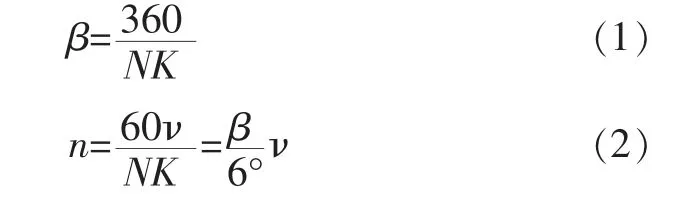
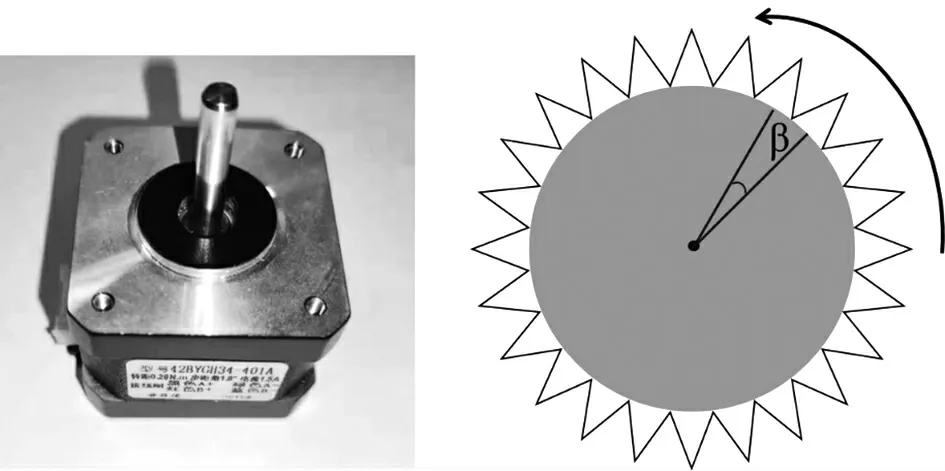
图3 42BYGH34-401A型步进电机及其转子齿轮结构1.2.3舵机
舵机也称为伺服电机,当给舵机发送一个控制信号时,内部电机就会转动相应的角度,将压纸杆抬高到特定的高度,其结构图如图4所示。只要发送给舵机的信号不发生变化,舵机转动的角度就保持不变,当改变输入信号时舵机转动角度也会随之改变。舵机的使用范围十分广泛,例如智能车、航模、机器人等方面。本文使用XQ-S4618D型无刷数码舵机,其工作电压为4.8 V~6.0 V,6.0 V时舵机转动速度为0.1 s/60°,扭力为20.5 kg/cm,4.8 V时舵机转动速度为0.12 s/60°,扭力为17.4 kg/cm,能够带动压纸杆转动,并能够克服压纸弹簧的弹力。
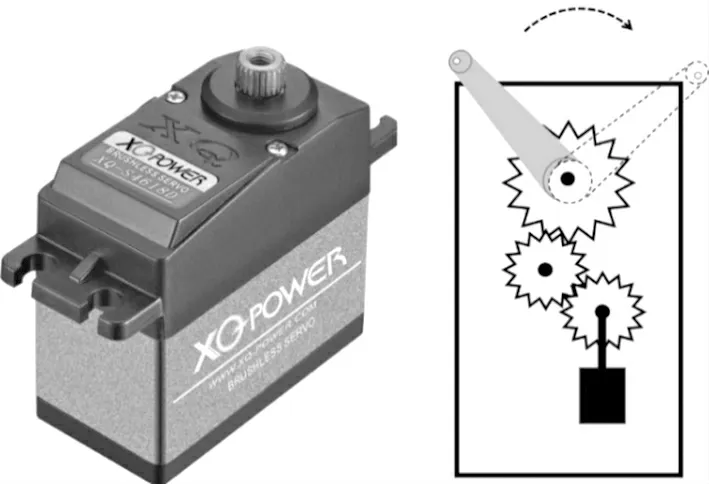
图4 舵机及其结构示意图
1.2.4 红外测距模块
红外测距模块由一只红外发射管和一只红外接收管组成,也称为红外对管,测量范围广,测量结果准确,其工作原理如图5所示。当纸张经过红外测距模块时,纸张距离红外对管较近,因此,可以在程序中设定合适的距离范围作为触发步进电机和舵机的依据,当纸张通过压纸杆的红外模块后,步进电机反向转动使翻页杆返回。本文采用GP2Y0A21YK0F红外传感器模块进行测距,其测量距离范围较广,可以对10 cm~80 cm之间的距离进行精确测量。
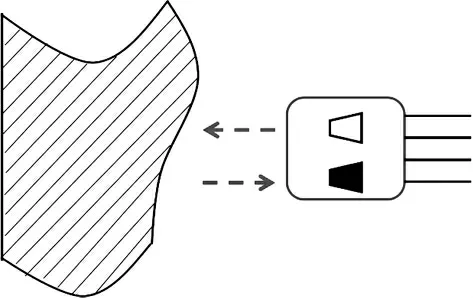
图5 红外测距模块工作原理
2 程序设计及实现
翻页机的整个程序运行过程如图6所示,程序进行过程中需要进行多次判断以保证每个环节正常进行。第1次判断目的是保证腔体内达到设定的真空度,可用真空度测试仪检测,真空度降低到设定值以下时气泵自动启动抽气;第2次判断目的是保证气泵吸嘴已经将纸张吸起,此处设定纸张吸起时红外模块测距结果在10 cm~20 cm之间;第3次判断目的是保证纸张已经被翻页杆翻到压纸杆附近,此时也设定10 cm~20 cm作为判断依据;第4次判断用于保证翻动的纸张已经被压纸杆压下,压纸杆附近没有被翻动的纸张时,翻页杆在步进电机带动下返回初始位置,准备下一次翻页。本设计以STM32F103RBT6为开发平台,并用固件库的形式搭建系统程序,依据程序流程图可搭建main.c、main.h以及各个模块的驱动程序,经测试,系统能够稳定运行。
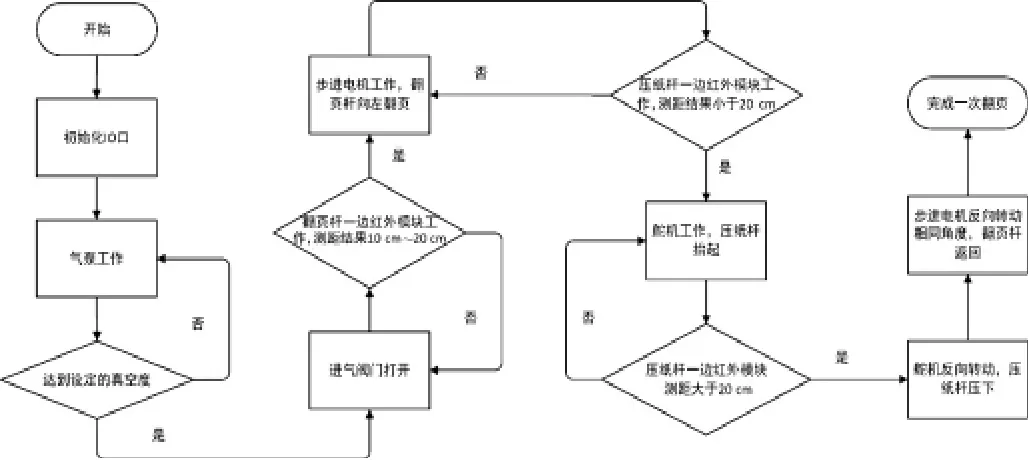
图6 翻页机运行程序流程图
3 结论
本文设计了一种自动翻页机,翻页机以STM32F103RBT6为核心控制器,以气泵、步进电机、舵机、红外测距模块作为输出模块,以翻页杆、压纸杆、滑轨、弹簧、金属丝等搭建简单机械结构,最终灌以控制程序而成。控制气泵吸取纸张,纸张掠过气泵一边的红外模块探测头时触发翻书杆进行翻页,当纸张再次掠过压纸杆一边的红外模块探测头时触发压纸杆抬起和压下,完成一次翻页。翻页机的运行可以通过程序控制自动运行,也可以通过按键、语音模块等触发而运行。